You might also like
- Practice Problems For Advanced Vibrations: April 2019Document36 pagesPractice Problems For Advanced Vibrations: April 2019KEVIN CORDOVA RODRIGUEZ100% (1)
- Practice Problems For Advanced Vibrations: April 2019Document36 pagesPractice Problems For Advanced Vibrations: April 2019Animesh ChandraNo ratings yet
- Practice Problems For Advanced Vibrations: April 2019Document36 pagesPractice Problems For Advanced Vibrations: April 2019Animesh ChandraNo ratings yet
- Autonomous University of Baja California: Faculty of Engineering Aerospace EngineeringDocument18 pagesAutonomous University of Baja California: Faculty of Engineering Aerospace EngineeringOscar Oreste Salvador CarlosNo ratings yet
- 10ROTATIONAL Equilibrium and Non-Equilibrium (P211) Rev2.2Document7 pages10ROTATIONAL Equilibrium and Non-Equilibrium (P211) Rev2.2Shriya SaiNo ratings yet
- Dynamic Modeling of Spherical Parallel Robot 3-URU: Hanen EL Golli, Ajmi HOUIDI, Abdelfatteh MLIKADocument4 pagesDynamic Modeling of Spherical Parallel Robot 3-URU: Hanen EL Golli, Ajmi HOUIDI, Abdelfatteh MLIKAChiheb MrabetNo ratings yet
- Discussion of The Improved Methods For Analyzing ADocument16 pagesDiscussion of The Improved Methods For Analyzing ASudheer Reddy TenaliNo ratings yet
- Biaxial Analysis of General Shaped Base PlatesDocument5 pagesBiaxial Analysis of General Shaped Base PlatesSuheil BagasrawalaNo ratings yet
- 15ME205 Unit 1 QBDocument11 pages15ME205 Unit 1 QBrameshtrk100% (1)
- Lab2 Principle of Moment PDFDocument7 pagesLab2 Principle of Moment PDFAnwaar SafdarNo ratings yet
- Static and Dynamic Balancing: ObjectiveDocument5 pagesStatic and Dynamic Balancing: ObjectiveUNsha bee komNo ratings yet
- ICSE X FORCE REMEDIAL REVISION-mergedDocument8 pagesICSE X FORCE REMEDIAL REVISION-mergedanimeshtechnosNo ratings yet
- QUESTIONDocument15 pagesQUESTIONHammad SargurohNo ratings yet
- Tutorial 1 Topic: Vibration BNJ 20303 Mechanic of Machine SEMESTER 1 SESI 2020/2021Document6 pagesTutorial 1 Topic: Vibration BNJ 20303 Mechanic of Machine SEMESTER 1 SESI 2020/2021Jojnojie DannyzNo ratings yet
- Expriment No 2Document6 pagesExpriment No 2Muhammad IshfaqNo ratings yet
- Assignment 2Document3 pagesAssignment 2Hamza RazaNo ratings yet
- Physics-1 Recitation-7: 1. The Angular Position of A Point On A Wheel Is Described byDocument10 pagesPhysics-1 Recitation-7: 1. The Angular Position of A Point On A Wheel Is Described byAlexNo ratings yet
- IntroductionDocument9 pagesIntroductionJM085No ratings yet
- A Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionDocument11 pagesA Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionBeny AbdouNo ratings yet
- Civil Lab ManualDocument17 pagesCivil Lab ManualShakil KhanNo ratings yet
- Trabajo VibracionesDocument17 pagesTrabajo VibracionesCesar BautistaNo ratings yet
- Design1 Statics StremaDocument11 pagesDesign1 Statics StremaSilverNo ratings yet
- Semester One 2016 Examination Period Faculty of EngineeringDocument6 pagesSemester One 2016 Examination Period Faculty of EngineeringheinthetzawNo ratings yet
- EM May June 2009Document6 pagesEM May June 2009Naga PrasadNo ratings yet
- Measurment of Stress and StrainDocument3 pagesMeasurment of Stress and StrainChristie SilvaNo ratings yet
- 1 Resultant of Coplanar and Non Coplanar PDFDocument28 pages1 Resultant of Coplanar and Non Coplanar PDFjampanivenkat8No ratings yet
- PerpetualDocument6 pagesPerpetualShankar AcharNo ratings yet
- Icse X Force Question BankDocument7 pagesIcse X Force Question BankgpfphysicsNo ratings yet
- Vibrations Jean Paul CaceresDocument14 pagesVibrations Jean Paul CaceresJean Paul Cáceres CanoNo ratings yet
- 106 AngularMomentum ENGDocument14 pages106 AngularMomentum ENGKristy LeeNo ratings yet
- Structural Analysis R19 - UNIT-1 (Ref-2)Document56 pagesStructural Analysis R19 - UNIT-1 (Ref-2)SushNo ratings yet
- EM&SOMwith Out AnswersDocument7 pagesEM&SOMwith Out AnswersMohith SNo ratings yet
- Static & Dynamic Balancing: I-IntroductionDocument10 pagesStatic & Dynamic Balancing: I-Introductionboud3No ratings yet
- University of Nigeria, Nsukka: ME 431 - Theory of Elasticity IDocument14 pagesUniversity of Nigeria, Nsukka: ME 431 - Theory of Elasticity IEmmanuel JustinNo ratings yet
- Bifilar and Trifilar ReportDocument43 pagesBifilar and Trifilar ReportHasan Seleem100% (1)
- A Method To Design Vibratory Bowl FeederDocument5 pagesA Method To Design Vibratory Bowl Feederأحمد عاطف أبوغديرNo ratings yet
- Astronomy SolutionsDocument15 pagesAstronomy SolutionsGowrisankar RaoNo ratings yet
- PHY5113 TUTORIAL N0 3 Questions PDFDocument9 pagesPHY5113 TUTORIAL N0 3 Questions PDFAlbertNo ratings yet
- Me304 Dynamics of Machinery, May 2022Document4 pagesMe304 Dynamics of Machinery, May 2022Alok DineshNo ratings yet
- Theory of StructuresDocument35 pagesTheory of StructurespjNo ratings yet
- PDF Dynamic Analysis of StructuresDocument43 pagesPDF Dynamic Analysis of StructuresChegue BureNo ratings yet
- Presentation On BarsDocument80 pagesPresentation On Barsnagoori amanullaNo ratings yet
- Week - 6Document5 pagesWeek - 6Sudhakar UppalapatiNo ratings yet
- Dynamic Balancing of The SCARA Robot: To Cite This VersionDocument9 pagesDynamic Balancing of The SCARA Robot: To Cite This VersionBAUTISTA BORDA ALEXANDERNo ratings yet
- 3 Mechanical System ModelingDocument9 pages3 Mechanical System ModelingAditya PrakashNo ratings yet
- PHD Proposal - Alex BrandaoDocument23 pagesPHD Proposal - Alex BrandaoAlex BrandãoNo ratings yet
- Rnoti p1106Document13 pagesRnoti p1106Juan Luis García ZapataNo ratings yet
- Em MCQDocument4 pagesEm MCQAzad DuppalaNo ratings yet
- Theory of StructuresDocument35 pagesTheory of StructuresPatricia Nicole ElediaNo ratings yet
- The Atwood Machine Revisited Using Smartphones: Articles You May Be Interested inDocument3 pagesThe Atwood Machine Revisited Using Smartphones: Articles You May Be Interested insinta murtiNo ratings yet
- System of Coplanar ForcesDocument18 pagesSystem of Coplanar Forceschandan_j4u100% (1)
- Experiment 7: Uniform Circular Motion: PurposeDocument5 pagesExperiment 7: Uniform Circular Motion: PurposeVince Rabin CandidatoNo ratings yet
- 3 EquilibriumDocument25 pages3 EquilibriumEphrem yenatuNo ratings yet
- Dynamics-Assigment 2Document16 pagesDynamics-Assigment 2imran5705074No ratings yet
- The Quadhelix Maxillary Expansion ApplianceDocument10 pagesThe Quadhelix Maxillary Expansion ApplianceMarcelinoFernandezNo ratings yet
- Law 1. Unless A Force Is Applied To A Particle It Will EitherDocument151 pagesLaw 1. Unless A Force Is Applied To A Particle It Will EitherSteve KrodaNo ratings yet
- Assignment-3-Centre of MassDocument6 pagesAssignment-3-Centre of MassSwarnalatha SwarnalathaNo ratings yet
- MECH3418 Dynamics-Lab Sheet-V2Document10 pagesMECH3418 Dynamics-Lab Sheet-V2Mandy ShiuNo ratings yet
- ITRS2015 RopeLab TripodsDocument25 pagesITRS2015 RopeLab Tripodschanks498No ratings yet
- Energy Absorbing LanyardDocument112 pagesEnergy Absorbing Lanyardchanks498No ratings yet
- Kirby Morgan EXO Full Face Mask: World Leaders in Diving Equipment TechnologyDocument2 pagesKirby Morgan EXO Full Face Mask: World Leaders in Diving Equipment Technologychanks498No ratings yet
- Pressure SwitchDocument1 pagePressure Switchchanks498No ratings yet
- Kirby Morgan Dive Helmet 37 Operations ADocument105 pagesKirby Morgan Dive Helmet 37 Operations Achanks498No ratings yet
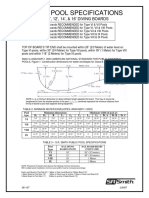
- Public Pool Specifications: 8', 10', 12', 14', & 16' DIVING BOARDSDocument1 pagePublic Pool Specifications: 8', 10', 12', 14', & 16' DIVING BOARDSchanks498No ratings yet
- On Thin Ice: in The Far North With The US NavyDocument25 pagesOn Thin Ice: in The Far North With The US Navychanks498No ratings yet
- For CV Containing Full Contact Details Email: Curriculum Vitae Commercial Diver Name: AddressDocument3 pagesFor CV Containing Full Contact Details Email: Curriculum Vitae Commercial Diver Name: Addresschanks498No ratings yet
- Diving at Work Regulation 1997Document28 pagesDiving at Work Regulation 1997chanks498No ratings yet
- Canopy Access: Beyond Basic Single Rope Technique: By: Joe Maher Institute For Tropical Ecology and ConservationDocument11 pagesCanopy Access: Beyond Basic Single Rope Technique: By: Joe Maher Institute For Tropical Ecology and Conservationchanks498No ratings yet
- Bat GuideDocument26 pagesBat Guidechanks498No ratings yet
- Underwater Welding and Non-Destructive Testing in Support of U.S. Navy Ship Repair OperationsDocument16 pagesUnderwater Welding and Non-Destructive Testing in Support of U.S. Navy Ship Repair Operationschanks498No ratings yet
- CavingDocument12 pagesCavingchanks498No ratings yet
- Knot Booklet NraaDocument5 pagesKnot Booklet Nraachanks498No ratings yet
- Ppe Wah-RiggerDocument107 pagesPpe Wah-Riggerchanks498No ratings yet
- Common Reference Examples Guide: 7th EditionDocument4 pagesCommon Reference Examples Guide: 7th Editionchanks498No ratings yet
- Professional: Catalogue 2020 / 2021Document196 pagesProfessional: Catalogue 2020 / 2021chanks498No ratings yet
- Apa Full Faa CPL Me/Jaa Atp A Accelerated Flight Training CourseDocument8 pagesApa Full Faa CPL Me/Jaa Atp A Accelerated Flight Training Coursechanks498No ratings yet
- Kevin Lunnie & James Croswell: Presented at The 2021 International Technical Rescue Symposium - Golden, CODocument8 pagesKevin Lunnie & James Croswell: Presented at The 2021 International Technical Rescue Symposium - Golden, COchanks498No ratings yet
- Engineering Vol 69 1900-03-09Document29 pagesEngineering Vol 69 1900-03-09ian_newNo ratings yet
- Angle Domain Processing BBMDocument4 pagesAngle Domain Processing BBMAlvaro CotaquispeNo ratings yet
- Pega Study Tutorial Interview QuestionsDocument318 pagesPega Study Tutorial Interview QuestionssubbaraogaddamNo ratings yet
- Simple Pendulum.Document13 pagesSimple Pendulum.ab594100% (5)
- BTCS (703) Network Pogramming Unit IDocument41 pagesBTCS (703) Network Pogramming Unit IVivek SoniNo ratings yet
- SCM CST SLA Setup Documentation V 2Document32 pagesSCM CST SLA Setup Documentation V 2ankitdessoreNo ratings yet
- ADP3205 AnalogDevicesDocument24 pagesADP3205 AnalogDevicesIlton GomesNo ratings yet
- Group 8, Welding AssignmentDocument11 pagesGroup 8, Welding AssignmentKavish ChandraNo ratings yet
- Chalmlite Tutorials CompleteDocument10 pagesChalmlite Tutorials CompleteabidekNo ratings yet
- Machine ElementsDocument6 pagesMachine Elementsmahipunny2No ratings yet
- Reciprocating Compressor: Semi-HermeticDocument12 pagesReciprocating Compressor: Semi-HermeticGosai MohamedNo ratings yet
- Biophysical Techniques in Photosynthesis PDFDocument424 pagesBiophysical Techniques in Photosynthesis PDFAbdelhakim HarchaouiNo ratings yet
- Pitcairn-Background Concentration of GoldDocument9 pagesPitcairn-Background Concentration of GoldAmanda ThomNo ratings yet
- 22212-2019-Winter-Model-Answer-Paper (Msbte Study Resources)Document22 pages22212-2019-Winter-Model-Answer-Paper (Msbte Study Resources)pravin khadeNo ratings yet
- Equipments Used in Making SuspensionsDocument26 pagesEquipments Used in Making Suspensionsmomina arshidNo ratings yet
- NCERT Solutions For Class 7 Maths Chapter 3Document15 pagesNCERT Solutions For Class 7 Maths Chapter 3Annapoorani RajappanNo ratings yet
- Physical ChemistryDocument11 pagesPhysical ChemistryAmaan B EydreesNo ratings yet
- Manual Sony Cdxgt360sDocument45 pagesManual Sony Cdxgt360spedroNo ratings yet
- Kurva-S Arjasa - 2020 FebruariDocument57 pagesKurva-S Arjasa - 2020 FebruariIshaqNo ratings yet
- DJI Air 2S User ManualDocument52 pagesDJI Air 2S User ManualAlexandre Costa de LimaNo ratings yet
- Thermal Analysis of Cutting Tools by Using Different Cutting FluidsDocument45 pagesThermal Analysis of Cutting Tools by Using Different Cutting FluidspothanNo ratings yet
- Alcatel 2033 2063 Users Instruction ManualDocument30 pagesAlcatel 2033 2063 Users Instruction ManualpizandolaNo ratings yet
- Module 1 of Calculus 2Document2 pagesModule 1 of Calculus 2Jimbo J. AntipoloNo ratings yet
- CFP Incas 16092021 V2Document1 pageCFP Incas 16092021 V2VICTOR ROY CACERES HUAMANNo ratings yet
- CO AnalyzerDocument11 pagesCO AnalyzerVăn ST QuangNo ratings yet
- Es 1Document47 pagesEs 1AnonymousNo ratings yet
- Flashing Routerboards With OpenWRT PDFDocument11 pagesFlashing Routerboards With OpenWRT PDFdamianuskrowinNo ratings yet
- Digitron 2000 Series User ManualDocument8 pagesDigitron 2000 Series User ManualFelipe Cáceres S.No ratings yet
- Analytic & Synthetic SurfacesDocument12 pagesAnalytic & Synthetic SurfacesHareesh R Iyer0% (1)
- Titrimetric Analysis (Acid-Base)Document4 pagesTitrimetric Analysis (Acid-Base)anon_853848256No ratings yet