You might also like
- Modelling of Vibrations of Overhead Line Conductors: Assessment of the TechnologyFrom EverandModelling of Vibrations of Overhead Line Conductors: Assessment of the TechnologyGiorgio DianaNo ratings yet
- Caws TailsDocument40 pagesCaws TailsRafael FigueiraNo ratings yet
- The Knot Book - Knots, Bends and Hitches - A Guide for Sailors, Adventurers and HobbyistsFrom EverandThe Knot Book - Knots, Bends and Hitches - A Guide for Sailors, Adventurers and HobbyistsNo ratings yet
- Rescue BelaysDocument12 pagesRescue BelaysbubbaNo ratings yet
- Railroad Track Mechanics and Technology: Proceedings of a Symposium Held at Princeton University, April 21 - 23, 1975From EverandRailroad Track Mechanics and Technology: Proceedings of a Symposium Held at Princeton University, April 21 - 23, 1975Arnold D. KerrRating: 5 out of 5 stars5/5 (1)
- Dimensions Dog BoneDocument5 pagesDimensions Dog BonedeathesNo ratings yet
- Pneumatic and Hydrautic Conveying of Both Fly Ash and Bottom AshFrom EverandPneumatic and Hydrautic Conveying of Both Fly Ash and Bottom AshNo ratings yet
- Strength of Pilot LadderDocument12 pagesStrength of Pilot LadderMeyyappan aNo ratings yet
- 5.0 Modeling For Analysis 5.1 Structural Boundaries: Seismic Design and Retrofit of Piping SystemsDocument5 pages5.0 Modeling For Analysis 5.1 Structural Boundaries: Seismic Design and Retrofit of Piping SystemsmapasabcNo ratings yet
- Effect of Elasticity On Distribution of Mooring Line LoadsDocument5 pagesEffect of Elasticity On Distribution of Mooring Line LoadsLe Phuong DongNo ratings yet
- Backup Sensors Phillips PDFDocument17 pagesBackup Sensors Phillips PDFSachin SheraNo ratings yet
- Equipment Testing-Kiama VRPDWDocument9 pagesEquipment Testing-Kiama VRPDWalradicNo ratings yet
- Mooring Load Analysis ASCE 1998Document10 pagesMooring Load Analysis ASCE 1998Peyman MznNo ratings yet
- LTB of Beams in Ebf-JcsrDocument22 pagesLTB of Beams in Ebf-Jcsrkostas formulagrNo ratings yet
- Belt ConveyorDocument37 pagesBelt ConveyorBhanu Pratap ChoudhuryNo ratings yet
- Chaplin 1995Document13 pagesChaplin 1995Rodrigo Alejandro Flores ZuñigaNo ratings yet
- Pile Type 2 - Screw Pile Load Test Outline (Terna)Document113 pagesPile Type 2 - Screw Pile Load Test Outline (Terna)David Aurora MendozaNo ratings yet
- Dual Suspension and Sealong Rams For Use in A Blow Out PreventerDocument4 pagesDual Suspension and Sealong Rams For Use in A Blow Out PreventerHKHKBOOKSNo ratings yet
- I3 299 305 PDFDocument7 pagesI3 299 305 PDFHernâni CruzNo ratings yet
- Pile Type 1 - Screw Pile Load Test Outline (Terna)Document113 pagesPile Type 1 - Screw Pile Load Test Outline (Terna)David Aurora MendozaNo ratings yet
- Rope Rescue ManualDocument43 pagesRope Rescue ManualTheDoctorFeelGood100% (7)
- OTC 17510 Durability of Polyester Deepwater Mooring RopeDocument11 pagesOTC 17510 Durability of Polyester Deepwater Mooring RopeSharon FreemanNo ratings yet
- (MOORINGS) Otc17789 - Predicting The Torsional Response of Large Mooring Chains PDFDocument0 pages(MOORINGS) Otc17789 - Predicting The Torsional Response of Large Mooring Chains PDFAndrew EdwardNo ratings yet
- Cable Bolt Anchorage CharacteristicsDocument8 pagesCable Bolt Anchorage CharacteristicsPaul GauthierNo ratings yet
- A Machine For Interactive Fatigue TestinDocument11 pagesA Machine For Interactive Fatigue Testinshah nauman100% (1)
- Vacuum Braking System Research PaperDocument4 pagesVacuum Braking System Research Paperafmdaludb100% (1)
- Maximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationDocument19 pagesMaximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationhaizhouNo ratings yet
- Strength of Parallel Wire Cables For Suspension BRDocument7 pagesStrength of Parallel Wire Cables For Suspension BRPerson GainableNo ratings yet
- Krakow SuturesDocument5 pagesKrakow Sutureszieky yoansyahNo ratings yet
- Cross Bonding ENGDocument281 pagesCross Bonding ENGrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrNo ratings yet
- Pilot-Wire Circuits For Protective Relaying - Experience and PracticeDocument2 pagesPilot-Wire Circuits For Protective Relaying - Experience and PracticeAnonymous m65TTcfOTNo ratings yet
- Huang 2017 IOP Conf. Ser. Earth Environ. Sci. 64 012018Document9 pagesHuang 2017 IOP Conf. Ser. Earth Environ. Sci. 64 012018Abu SayedNo ratings yet
- RLA - The Foundations of Rescue and Rigging Anchors Systems - EbookDocument19 pagesRLA - The Foundations of Rescue and Rigging Anchors Systems - EbookCarlos SantosNo ratings yet
- Continuity of Precast Bridge U-Girders Connected To A Cast-In-Place Substructure Subjected To Seismic LoadsDocument8 pagesContinuity of Precast Bridge U-Girders Connected To A Cast-In-Place Substructure Subjected To Seismic LoadsdinkoNo ratings yet
- Marlinespike - Rope Breaking StrengthDocument7 pagesMarlinespike - Rope Breaking StrengthAnonymous ycFeyuLAt100% (1)
- Electrowetting Based Check ValveDocument10 pagesElectrowetting Based Check Valvedipta sahaNo ratings yet
- Problems of Torque and Rotation in Wire Ropes: 1. Internationaler Stuttgarter Seiltag 21. Februar 2002Document9 pagesProblems of Torque and Rotation in Wire Ropes: 1. Internationaler Stuttgarter Seiltag 21. Februar 2002ManuelNo ratings yet
- Distributed Strain Measurements For Culvert AssessmentDocument12 pagesDistributed Strain Measurements For Culvert AssessmentMario PerezNo ratings yet
- Kopanakis 4Document4 pagesKopanakis 4Александр КраснощокNo ratings yet
- Nonlinear Finite Element Analysis of Latticed Transmission Towers 1993Document11 pagesNonlinear Finite Element Analysis of Latticed Transmission Towers 1993ciscoNo ratings yet
- Materials 14 05743 v3Document17 pagesMaterials 14 05743 v3RamNo ratings yet
- Dynamic Model For Stiff String Torque and DragDocument16 pagesDynamic Model For Stiff String Torque and DragMOHAMED ALi IBRAHIM HASSANNo ratings yet
- Deposition Velocity EstimationDocument179 pagesDeposition Velocity EstimationGlawenClattucNo ratings yet
- Anchoring SystemDocument29 pagesAnchoring Systemintan nNo ratings yet
- Rope Rescue ManualDocument43 pagesRope Rescue Manualakusendirilah100% (1)
- Frączek 2016 J. Phys. Conf. Ser. 760 012004Document11 pagesFrączek 2016 J. Phys. Conf. Ser. 760 012004Ayouba FOFANANo ratings yet
- How To Perform A Wire InspectionDocument8 pagesHow To Perform A Wire InspectionCarlos MartinezNo ratings yet
- Failure of Springs PDFDocument10 pagesFailure of Springs PDFMilind Chimurkar100% (1)
- Kootenay Highline SystemDocument7 pagesKootenay Highline SystembubbaNo ratings yet
- Lateral Stiffness and Deflection Characteristics of Guide Cable With Multi-Boundary ConstraintsDocument13 pagesLateral Stiffness and Deflection Characteristics of Guide Cable With Multi-Boundary Constraintssoheil norooziNo ratings yet
- Construction of Aerial Runways: District Pioneering Course LN Conjunction With The Nat'l Pioneering Instructor CourseDocument17 pagesConstruction of Aerial Runways: District Pioneering Course LN Conjunction With The Nat'l Pioneering Instructor CourseCuon Scout Group100% (2)
- SPE 26774 Pipeline Freespan Evaluation: A New MethodologyDocument10 pagesSPE 26774 Pipeline Freespan Evaluation: A New MethodologycmkohNo ratings yet
- No Rope No ProbemDocument1 pageNo Rope No ProbemShazleen AtiqaNo ratings yet
- Jam Jan05Document11 pagesJam Jan05TMBryan Naufal AlfiansyahNo ratings yet
- An Experimental Study On Cyclic Loading of Piles in Sand: January 2007Document7 pagesAn Experimental Study On Cyclic Loading of Piles in Sand: January 2007Swamy ManiNo ratings yet
- Contract Research Report: Industrial Rope Access - Investigation Into Items of Personal Protective EquipmentDocument14 pagesContract Research Report: Industrial Rope Access - Investigation Into Items of Personal Protective EquipmenttiojotasNo ratings yet
- Robust Control of Residual Motion of Cable Transporter SystemsDocument6 pagesRobust Control of Residual Motion of Cable Transporter SystemskennarockNo ratings yet
- Anexosemttulo 00085Document9 pagesAnexosemttulo 00085ThejaswiniNo ratings yet
- Lightning Performance of Compact LinesDocument21 pagesLightning Performance of Compact LinesJuanjo Gonzales PerezNo ratings yet
- Lightning Performance of Compact LinesDocument21 pagesLightning Performance of Compact LinesJuanjo Gonzales PerezNo ratings yet
- 186 347 1 SMDocument6 pages186 347 1 SMchanks498No ratings yet
- Problemy Spawania Podwodnego Stali o Podwyzszonej Wytrzymalosci 61662Document9 pagesProblemy Spawania Podwodnego Stali o Podwyzszonej Wytrzymalosci 61662Abhay SinghNo ratings yet
- Kirby Morgan Dive Helmet 37 Operations ADocument105 pagesKirby Morgan Dive Helmet 37 Operations Achanks498No ratings yet
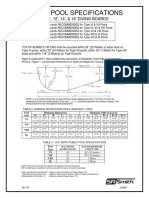
- Public Pool Specifications: 8', 10', 12', 14', & 16' DIVING BOARDSDocument1 pagePublic Pool Specifications: 8', 10', 12', 14', & 16' DIVING BOARDSchanks498No ratings yet
- On Thin Ice: in The Far North With The US NavyDocument25 pagesOn Thin Ice: in The Far North With The US Navychanks498No ratings yet
- Energy Absorbing LanyardDocument112 pagesEnergy Absorbing Lanyardchanks498No ratings yet
- ITRS2015 RopeLab TripodsDocument25 pagesITRS2015 RopeLab Tripodschanks498No ratings yet
- Kirby Morgan EXO Full Face Mask: World Leaders in Diving Equipment TechnologyDocument2 pagesKirby Morgan EXO Full Face Mask: World Leaders in Diving Equipment Technologychanks498No ratings yet
- IMCA-Briefing-428 (Medical Examination of Divers)Document20 pagesIMCA-Briefing-428 (Medical Examination of Divers)Ernesto CarmonaNo ratings yet
- Commercial Diving Projects Inland/inshore: Diving at Work Regulations 1997 Approved Code of Practice and GuidanceDocument47 pagesCommercial Diving Projects Inland/inshore: Diving at Work Regulations 1997 Approved Code of Practice and GuidanceAminNo ratings yet
- Kirby Morgan® Bandmask® 18: BandmasksDocument7 pagesKirby Morgan® Bandmask® 18: Bandmaskschanks498No ratings yet
- Diving at Work Regulation 1997Document28 pagesDiving at Work Regulation 1997chanks498No ratings yet
- Physical and Chemical Water Quality of Dug and Bore Well in The Working Area of Public Health Center II Guntur Demak RegencyDocument6 pagesPhysical and Chemical Water Quality of Dug and Bore Well in The Working Area of Public Health Center II Guntur Demak RegencyDwiki Ali SNo ratings yet
- Wilson - Cerebral Arterial Gas Embolism - 2015Document3 pagesWilson - Cerebral Arterial Gas Embolism - 2015chanks498No ratings yet
- Diving at Work Regulation 1997Document28 pagesDiving at Work Regulation 1997chanks498No ratings yet
- DIVE R U Involved in Diving Project PDFDocument20 pagesDIVE R U Involved in Diving Project PDFVignesh KmNo ratings yet
- Commercial Shellfish Diving Inshore WaterDocument8 pagesCommercial Shellfish Diving Inshore Waterchanks498No ratings yet
- Commercial Diving Projects Inland/inshore: Diving at Work Regulations 1997 Approved Code of Practice and GuidanceDocument47 pagesCommercial Diving Projects Inland/inshore: Diving at Work Regulations 1997 Approved Code of Practice and GuidanceAminNo ratings yet
- For CV Containing Full Contact Details Email: Curriculum Vitae Commercial Diver Name: AddressDocument3 pagesFor CV Containing Full Contact Details Email: Curriculum Vitae Commercial Diver Name: Addresschanks498No ratings yet
- British Sub-Aqua Club: The HSE and Recreational DivingDocument2 pagesBritish Sub-Aqua Club: The HSE and Recreational Divingchanks498No ratings yet
- DIVE R U Involved in Diving Project PDFDocument20 pagesDIVE R U Involved in Diving Project PDFVignesh KmNo ratings yet
- The Medical Examination and Assessment of Commercial Divers (MA1)Document27 pagesThe Medical Examination and Assessment of Commercial Divers (MA1)Divers Dream PrahaNo ratings yet
- British Sub-Aqua Club: The HSE and Recreational DivingDocument2 pagesBritish Sub-Aqua Club: The HSE and Recreational Divingchanks498No ratings yet
- Commercial Shellfish Diving Inshore WaterDocument8 pagesCommercial Shellfish Diving Inshore Waterchanks498No ratings yet
- Bat GuideDocument26 pagesBat Guidechanks498No ratings yet
- Underwater Welding PDFDocument5 pagesUnderwater Welding PDFrock_xxx567879No ratings yet
- CavingDocument12 pagesCavingchanks498No ratings yet
- Canopy Access: Beyond Basic Single Rope Technique: By: Joe Maher Institute For Tropical Ecology and ConservationDocument11 pagesCanopy Access: Beyond Basic Single Rope Technique: By: Joe Maher Institute For Tropical Ecology and Conservationchanks498No ratings yet
- Underwater Welding and Non-Destructive Testing in Support of U.S. Navy Ship Repair OperationsDocument16 pagesUnderwater Welding and Non-Destructive Testing in Support of U.S. Navy Ship Repair Operationschanks498No ratings yet
- Ppe Wah-RiggerDocument107 pagesPpe Wah-Riggerchanks498No ratings yet
- Technical Rescue Riggers Guide 0Document194 pagesTechnical Rescue Riggers Guide 0Patrik lativovicNo ratings yet
- Knot Tying LessonDocument48 pagesKnot Tying LessonChris SmithNo ratings yet
- Lesson 2.2 PhEd 14 (Outdoor and Adventure Activities)Document36 pagesLesson 2.2 PhEd 14 (Outdoor and Adventure Activities)Photography ChamberNo ratings yet
- Kevin Lunnie & James Croswell: Presented at The 2021 International Technical Rescue Symposium - Golden, CODocument8 pagesKevin Lunnie & James Croswell: Presented at The 2021 International Technical Rescue Symposium - Golden, COchanks498No ratings yet
- Alton Tarp Guide Digital 1Document46 pagesAlton Tarp Guide Digital 1LazySloth0% (3)
- Knots For ArboricultureDocument45 pagesKnots For ArboricultureTee Bush100% (2)
- 16-17 REVISED UMPA Standard Operating ProceduresDocument14 pages16-17 REVISED UMPA Standard Operating ProceduresPhạm Bích HồngNo ratings yet
- Knot Tying 1 Honour Trainer S NotesDocument11 pagesKnot Tying 1 Honour Trainer S Notesmaxi noveloNo ratings yet
- Rescue Knots and LinesDocument36 pagesRescue Knots and LinesBFP PANGLAONo ratings yet
- Radium Release Hitch KitDocument2 pagesRadium Release Hitch KitEdisson J. Urgiles SilvaNo ratings yet
- Essential KnotsDocument42 pagesEssential Knotsstummel6636No ratings yet
- Knot TyingDocument3 pagesKnot TyingMildred SarianNo ratings yet
- MountaineeringDocument23 pagesMountaineeringDR LIMBONo ratings yet
- How To Store Your Paracord and RidgelineDocument2 pagesHow To Store Your Paracord and RidgelineWilliam BoutinNo ratings yet
- Rope Rescue ManualDocument43 pagesRope Rescue ManualJosé Victor TeixeiraNo ratings yet
- Rope Rescue Technician Course PlanDocument7 pagesRope Rescue Technician Course PlanVahid VahidiNo ratings yet
- High Angle Rescue / Rope RescueDocument50 pagesHigh Angle Rescue / Rope RescueDaraga FirestationNo ratings yet
- Rescue Techniques: FOR Emergency ResponseDocument70 pagesRescue Techniques: FOR Emergency ResponseMehmet YamanNo ratings yet
- Rope Rescue Techniques - Principles and Practice Includes Navigate Advantage AccessDocument1,452 pagesRope Rescue Techniques - Principles and Practice Includes Navigate Advantage Accesssteven cheung100% (2)
- Rescue Technician Core: Connecticut Fire Academy Recruit Firefighter ProgramDocument106 pagesRescue Technician Core: Connecticut Fire Academy Recruit Firefighter ProgramMartin AunedoNo ratings yet
- Down-Thecompletedescentmanual Andy KirkpatrickDocument902 pagesDown-Thecompletedescentmanual Andy KirkpatrickSinziana GhinetNo ratings yet
- ABSEILING Techniques ManualDocument181 pagesABSEILING Techniques Manualkudingking adinNo ratings yet
- Written TTT-1 NWSADocument170 pagesWritten TTT-1 NWSARafael De La TorreNo ratings yet
- Thomas Evans, SAR ,: A Review of Knot Strength TestingDocument18 pagesThomas Evans, SAR ,: A Review of Knot Strength TestingFikri Dwi TanuzaNo ratings yet
- Feeder System Installation Procedure - MOPDocument19 pagesFeeder System Installation Procedure - MOPSandeep singhNo ratings yet
- Glacier Travel and Crevasse RescueDocument80 pagesGlacier Travel and Crevasse RescueMohamed F. AbdullahNo ratings yet
- M5E BRT MA SystemDocument20 pagesM5E BRT MA SystemFallucky SantiagoNo ratings yet
- Rope Access 1675296859Document127 pagesRope Access 1675296859petrus jacobNo ratings yet
- Rescue Plan For Maintenance Building Using Rope Access MethodDocument4 pagesRescue Plan For Maintenance Building Using Rope Access MethodCristlee TombokanNo ratings yet
- PE Notes MidtermDocument6 pagesPE Notes MidtermHannah OmegaNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksFrom EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNo ratings yet
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksFrom EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)