You might also like
- Digital Communications FundamentalsDocument44 pagesDigital Communications FundamentalsKvnsumeshChandraNo ratings yet
- How to Optimize Your Website for Search EnginesDocument17 pagesHow to Optimize Your Website for Search EnginesNano GomeshNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Question BankDocument6 pagesQuestion Banksweetkhushboo786_592No ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Analog and Digital CommunicationDocument11 pagesAnalog and Digital CommunicationKarthi KeyanNo ratings yet
- Formatting and Baseband ModulationDocument16 pagesFormatting and Baseband Modulationlongyeuhuong50% (2)
- Analog Communication (ECE - 3103) PDFDocument2 pagesAnalog Communication (ECE - 3103) PDFDevender DuaNo ratings yet
- Ec 2004 (PDC) - CS - End - May - 2023Document24 pagesEc 2004 (PDC) - CS - End - May - 2023223UTKARSH TRIVEDINo ratings yet
- Frequency Modulation & DemodulationDocument11 pagesFrequency Modulation & DemodulationALINo ratings yet
- Digital Communications Lab ExperimentsDocument0 pagesDigital Communications Lab Experimentsagama1188No ratings yet
- Tutorial 1 AssignmentDocument2 pagesTutorial 1 AssignmentbaaaaNDSNo ratings yet
- Central College of Engineering & Management Department of Electronics and Telecommunication Engineering Course:-B.E. (6 Sem.) Subject: Communication System-IiDocument8 pagesCentral College of Engineering & Management Department of Electronics and Telecommunication Engineering Course:-B.E. (6 Sem.) Subject: Communication System-IiqweweNo ratings yet
- Principles of Primary MUXDocument164 pagesPrinciples of Primary MUXVivek Kumar MNo ratings yet
- Tutorial 4-SolutionDocument11 pagesTutorial 4-SolutionZaidi Mat ZainuddinNo ratings yet
- A FPGA Based TDEMI Measurement System For Quasi-Peak Detection and Disturbance AnalysisDocument4 pagesA FPGA Based TDEMI Measurement System For Quasi-Peak Detection and Disturbance AnalysisAli ShaebaniNo ratings yet
- DC ManualDocument62 pagesDC ManualnavecNo ratings yet
- Sampling With Automatic Gain Control 4Document31 pagesSampling With Automatic Gain Control 4anandbabugopathotiNo ratings yet
- End-Semester Exam Questions in Communication SystemsDocument4 pagesEnd-Semester Exam Questions in Communication SystemsYash YashNo ratings yet
- School of Electronics Engineering: Specific Instruction To Students (If Any)Document2 pagesSchool of Electronics Engineering: Specific Instruction To Students (If Any)Dinesh ReddyNo ratings yet
- Simula5 PWMDocument12 pagesSimula5 PWMAhmed Musa AlShormanNo ratings yet
- rr322205 Communication SystemsDocument7 pagesrr322205 Communication SystemsSRINIVASA RAO GANTANo ratings yet
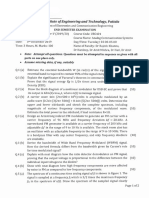
- Thapar Institute of Engineering and Technology, PatialaDocument2 pagesThapar Institute of Engineering and Technology, PatialaJagat ChauhanNo ratings yet
- Sheet SamplingDocument3 pagesSheet SamplingAhmed MohamedNo ratings yet
- Lock-In Amplifier ReportDocument14 pagesLock-In Amplifier ReportDaniel VergaraNo ratings yet
- DCDocument8 pagesDCharshit420No ratings yet
- DC Que BankDocument11 pagesDC Que BankGaurav Kumbharde0% (1)
- COMMUNICATION3Document3 pagesCOMMUNICATION3october87No ratings yet
- Practice QuestionsDocument4 pagesPractice Questionspratik shuklaNo ratings yet
- Signal Processing and Correlation Techniques: PreambleDocument15 pagesSignal Processing and Correlation Techniques: PreamblejuboraNo ratings yet
- Data Converters1Document30 pagesData Converters1Vidyanand PattarNo ratings yet
- EE370 Lab Experiment 07Document3 pagesEE370 Lab Experiment 07Mustaq AhmedNo ratings yet
- Signal DigitizationDocument37 pagesSignal DigitizationJoy NkiroteNo ratings yet
- Ec 8561 Com. Sys. Lab ManualDocument85 pagesEc 8561 Com. Sys. Lab ManualSri RamNo ratings yet
- Homework 3Document13 pagesHomework 3Zaha GeorgeNo ratings yet
- null-2Document8 pagesnull-2ahmedabdulkarim554No ratings yet
- Lab Modicom 2Document9 pagesLab Modicom 2Izzati AtiqahNo ratings yet
- PCM SimulationDocument44 pagesPCM Simulationauro auroNo ratings yet
- School of Electronics Engineering (Sense) : Answer Any Three QuestionsDocument9 pagesSchool of Electronics Engineering (Sense) : Answer Any Three QuestionsIyyaasuu YaadataaNo ratings yet
- Nemo, Czriss Paulimer C - Problem Set 1Document7 pagesNemo, Czriss Paulimer C - Problem Set 1pauliNo ratings yet
- Intro-to-WFE-and-SamplingDocument12 pagesIntro-to-WFE-and-Samplinghamza mohsenNo ratings yet
- S A A O N I S C A C: Imulation ND Nalysis F Oise N Witched Apacitor Mplifier IrcuitsDocument4 pagesS A A O N I S C A C: Imulation ND Nalysis F Oise N Witched Apacitor Mplifier IrcuitsSai KrishnaNo ratings yet
- Baseband Data Transmissions: 5.1 ObjectiveDocument25 pagesBaseband Data Transmissions: 5.1 ObjectiveIulian NeagaNo ratings yet
- Sampling and Rate Conversion LabDocument17 pagesSampling and Rate Conversion Labmjrahimi.eee2020No ratings yet
- Lab 02Document8 pagesLab 02Joevane B. EscrupoloNo ratings yet
- Experiment 1: Sampling and ReconstructionDocument12 pagesExperiment 1: Sampling and ReconstructionRAHUL VORANo ratings yet
- Electronics & Communication EngineeringDocument41 pagesElectronics & Communication EngineeringKrishna Chaitanya TNo ratings yet
- 5.0 Objectives:: MODULE-4&5 Sampling and QuantizationDocument19 pages5.0 Objectives:: MODULE-4&5 Sampling and QuantizationthasuplysmNo ratings yet
- Discrete Time Signals and Fourier SeriesDocument34 pagesDiscrete Time Signals and Fourier SeriesFatima AhsanNo ratings yet
- Analog To Digital Conversion Digital To Analog Conversion: Tanauan City CollegeDocument44 pagesAnalog To Digital Conversion Digital To Analog Conversion: Tanauan City CollegeRalph Laurence G VisayaNo ratings yet
- Vlsi Data Conversion Circuits: Problem Set 1Document2 pagesVlsi Data Conversion Circuits: Problem Set 1Romeo NooreNo ratings yet
- DComm PracticalsDocument45 pagesDComm PracticalsShubham RathodNo ratings yet
- Engineering ChemistryDocument54 pagesEngineering ChemistrysanjuNo ratings yet
- VHDL Simulation of Cusp-Like Filter For High Resolution Radiation SpectrosDocument6 pagesVHDL Simulation of Cusp-Like Filter For High Resolution Radiation Spectrosamreshjha22No ratings yet
- Chapter 2Document14 pagesChapter 2kedirNo ratings yet
- Digital CommunicationDocument27 pagesDigital Communicationravikumar rayalaNo ratings yet
- Chapter 2Document16 pagesChapter 2Ahmed SaeedNo ratings yet
- Data Communication MCQDocument418 pagesData Communication MCQJefrilyn CastilloNo ratings yet
- Cacho, Kathleen Joy C. (Digital Communication SFE Portfolio)Document14 pagesCacho, Kathleen Joy C. (Digital Communication SFE Portfolio)KATHLEEN JOY CACHONo ratings yet
- Telecommunication Networks PDFDocument1,076 pagesTelecommunication Networks PDFamirmalikNo ratings yet
- P0843Document2 pagesP0843Sergio NicoliniNo ratings yet
- BCM20734Document51 pagesBCM20734Vincenzo CerbinoNo ratings yet
- Unit 2 Fundamental Concepts in Video Types of Video SignalsDocument13 pagesUnit 2 Fundamental Concepts in Video Types of Video SignalsEzo'nun BabasıNo ratings yet
- Lecture Chapter 6Document42 pagesLecture Chapter 6Usman InayatNo ratings yet
- TC-L32C5/TC-L32C5X/TC-32LC54 TC-L42U5/TC-L42U5X: Operating InstructionsDocument8 pagesTC-L32C5/TC-L32C5X/TC-32LC54 TC-L42U5/TC-L42U5X: Operating InstructionsMarksNo ratings yet
- Sample Maths Exam PDFDocument11 pagesSample Maths Exam PDFAnonymous oJ0Dl7rWNo ratings yet
- Pulse Code ModulationDocument5 pagesPulse Code ModulationEr Amarsinh RNo ratings yet
- Digi Comm 1Document3 pagesDigi Comm 1ShebNo ratings yet
- DM-4 Marine Data Sheet 4921240294 UKDocument12 pagesDM-4 Marine Data Sheet 4921240294 UKLeong ChNo ratings yet
- PCM, Differential Coding, DPCM, DM, ADPCM - Ze-Nian Li and Mark SDocument13 pagesPCM, Differential Coding, DPCM, DM, ADPCM - Ze-Nian Li and Mark SAkshay GireeshNo ratings yet
- Manual On Air Traffic Services (ATS) Ground-Ground Voice Switching and SignallingDocument40 pagesManual On Air Traffic Services (ATS) Ground-Ground Voice Switching and SignallingAnonymous zE7GEC1mX50% (2)
- Tele CommunicationDocument0 pagesTele Communicationwww.bhawesh.com.npNo ratings yet
- Rockchip RK3588 Datasheet V0 1-20210727Document35 pagesRockchip RK3588 Datasheet V0 1-20210727scribd2No ratings yet
- Computer Network Physical & Data Link Layer FundamentalsDocument52 pagesComputer Network Physical & Data Link Layer FundamentalsSy RofNo ratings yet
- 2015 InstrmentationDocument16 pages2015 InstrmentationpavaniNo ratings yet
- Lecture 4 Signal Encoding TechniquesDocument42 pagesLecture 4 Signal Encoding TechniquesListon KiwoliNo ratings yet
- Ece VI Digital Communication 10ec61 NotesDocument252 pagesEce VI Digital Communication 10ec61 NotesNiharika Korukonda100% (1)
- 1KHW002479 FOX61x LEDA1Document112 pages1KHW002479 FOX61x LEDA1Aldo Molinari100% (2)
- Telecom Question BankDocument54 pagesTelecom Question BankViswanath ReddyNo ratings yet
- ECE650 Midterm Exam S - 10Document2 pagesECE650 Midterm Exam S - 10MohammedFikryNo ratings yet
- Digital Modulation TechniquesDocument43 pagesDigital Modulation TechniquesDikesh ShresthaNo ratings yet
- Curtiss Wright February2017 BulletinDocument60 pagesCurtiss Wright February2017 Bulletinal marmokaNo ratings yet
- Book Modern Digital and Analog Communica PDFDocument926 pagesBook Modern Digital and Analog Communica PDFanirban687No ratings yet
- Analog and Digital Communication, 2016 PDFDocument559 pagesAnalog and Digital Communication, 2016 PDFSalvador Alcaraz100% (2)
- Pulse Modulation Techniques Explained in DetailDocument61 pagesPulse Modulation Techniques Explained in DetailRavi GuptaNo ratings yet
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)