You might also like
- Robotic Arm DesignDocument15 pagesRobotic Arm DesignOreoluwa AdediwuraNo ratings yet
- Modeling and Position Control of Mobile RobotDocument6 pagesModeling and Position Control of Mobile RobotAmin EslamiNo ratings yet
- Differential drive mobile robot odometryDocument9 pagesDifferential drive mobile robot odometryAmit ChavanNo ratings yet
- Tracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorDocument7 pagesTracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorViet Nguyen TrungNo ratings yet
- ROB521 Assignment 3Document7 pagesROB521 Assignment 311 1No ratings yet
- ROB521 Visual OdysseyDocument7 pagesROB521 Visual Odyssey11 1No ratings yet
- Fundamentals of Robotics: Lab ReportDocument13 pagesFundamentals of Robotics: Lab ReportTayyab KhalilNo ratings yet
- Assignment Report #4: Obstacle Avoidance AlgorithmDocument12 pagesAssignment Report #4: Obstacle Avoidance AlgorithmAnjali DhobaleNo ratings yet
- Differential Drive KinematicsDocument10 pagesDifferential Drive Kinematicsnesquik_snackNo ratings yet
- Fundamentals of Robotics: Lab ReportDocument13 pagesFundamentals of Robotics: Lab ReportTayyab KhalilNo ratings yet
- Position Control of Pick and Place Robotic ArmDocument5 pagesPosition Control of Pick and Place Robotic Armavinashs2410_41108610% (1)
- Position Control of a Mobile Robot Through PID ConDocument7 pagesPosition Control of a Mobile Robot Through PID ConTuan Anh HoangNo ratings yet
- Experimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsDocument6 pagesExperimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsdhineshpNo ratings yet
- Velocity Motion Model: x x y θ v ω r= v ω xDocument3 pagesVelocity Motion Model: x x y θ v ω r= v ω xJay WooNo ratings yet
- MATLAB ICE AssignDocument9 pagesMATLAB ICE AssignAbdullahJavedNo ratings yet
- Kinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulDocument6 pagesKinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulCamilo Ernesto Pardo BeainyNo ratings yet
- 1 Differential Drive KinematicsDocument8 pages1 Differential Drive Kinematicsindo spiceNo ratings yet
- Project Report Introduction To Autonomous Mobile Robots MCG 5138HDocument9 pagesProject Report Introduction To Autonomous Mobile Robots MCG 5138HFalky RabbNo ratings yet
- RacingDocument3 pagesRacingJosé García PérezNo ratings yet
- WINSEM2022-23 ITE4003 ETH VL2022230501735 2023-02-09 Reference-Material-IDocument4 pagesWINSEM2022-23 ITE4003 ETH VL2022230501735 2023-02-09 Reference-Material-Iparthvi11singhNo ratings yet
- Brief Paper Output Feedback Controller Design of A Unicycle-Type Mobile Robot With Delayed MeasurementsDocument8 pagesBrief Paper Output Feedback Controller Design of A Unicycle-Type Mobile Robot With Delayed MeasurementsZeeshan ShamsiNo ratings yet
- Practica4 RoboticaDocument6 pagesPractica4 RoboticaKurokoraNo ratings yet
- Mobile Robot Simulation and Control: System DefinitionDocument16 pagesMobile Robot Simulation and Control: System DefinitionRavindra BishtNo ratings yet
- Cricket ball animationDocument2 pagesCricket ball animationHaseeb RayhanNo ratings yet
- Emanuele FrontoniDocument36 pagesEmanuele FrontoniDon Vito AndoliniNo ratings yet
- Advanced Techniques of Industrial Robot Programming 79Document21 pagesAdvanced Techniques of Industrial Robot Programming 79Pablo HernandezNo ratings yet
- Workspace Analysis of 7-DOF Humanoid Robotic Arm: Jinliang Luo, Qun Wen, Jialai He and Bin YeDocument4 pagesWorkspace Analysis of 7-DOF Humanoid Robotic Arm: Jinliang Luo, Qun Wen, Jialai He and Bin YeOnlyBy MyselfNo ratings yet
- Direct Kinematic Modeling of 6R Robot Using Robotics ToolboxDocument4 pagesDirect Kinematic Modeling of 6R Robot Using Robotics ToolboxNedim BabicNo ratings yet
- 133 Other 470 1 2 20211003Document9 pages133 Other 470 1 2 20211003salah eldeenNo ratings yet
- 747 ProjectDocument9 pages747 ProjectYvan PierreNo ratings yet
- MOOC Control of Mobile Robots Simulation Lecture 4Document13 pagesMOOC Control of Mobile Robots Simulation Lecture 4jcvoscribNo ratings yet
- 133 Other 470 1 2 20211003Document9 pages133 Other 470 1 2 20211003salah eldeenNo ratings yet
- 3s.ramasamy and M.R.arshadDocument6 pages3s.ramasamy and M.R.arshadNirmal KushwahaNo ratings yet
- Arm Owi 535Document8 pagesArm Owi 535Felipe Apaza100% (1)
- Assignment No 2Document8 pagesAssignment No 2Victor DaggersNo ratings yet
- Fundamental of Robotics: Lab ReportDocument9 pagesFundamental of Robotics: Lab Reportjawad naseerNo ratings yet
- Assignment 1Document12 pagesAssignment 1Germán Gallardo DuránNo ratings yet
- My Practical Note BookDocument23 pagesMy Practical Note BookSamaresh PanNo ratings yet
- Dynamic Behavior of A SCARA RobotDocument16 pagesDynamic Behavior of A SCARA RobotMeryem MimiNo ratings yet
- PracticalDocument23 pagesPracticalKartik mondalNo ratings yet
- Robust Control For A Delta RobotDocument6 pagesRobust Control For A Delta Robotjuanpereza21No ratings yet
- 19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraDocument49 pages19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraTizon Star100% (1)
- Lazy Foo' Productions - Per-Pixel Collision DetectionDocument1 pageLazy Foo' Productions - Per-Pixel Collision DetectionEual UchihaNo ratings yet
- MatcodesDocument5 pagesMatcodesAcet AldehydeNo ratings yet
- Research On Motion Control Algorithm For Mirosot Soccer RobotDocument4 pagesResearch On Motion Control Algorithm For Mirosot Soccer RobotMuhammad RenaldyNo ratings yet
- Position Estimation For A Mobile Robot Using Data FusionDocument6 pagesPosition Estimation For A Mobile Robot Using Data FusionЋирка ФејзбуџаркаNo ratings yet
- MATLAB Programs, For 7th Sem CSE Students - Tushar KantDocument4 pagesMATLAB Programs, For 7th Sem CSE Students - Tushar KantJámès KõstãNo ratings yet
- Wheelchair Control and Navigation Based On Kinematic Model and Iris MovementDocument6 pagesWheelchair Control and Navigation Based On Kinematic Model and Iris MovementRafiqul IslamNo ratings yet
- Modelling and Simulation of 5 DOFDocument6 pagesModelling and Simulation of 5 DOFaditdharkarNo ratings yet
- CN_PART bDocument17 pagesCN_PART bkushkruthik555No ratings yet
- Exp1 Lab Report A4Document16 pagesExp1 Lab Report A4asad baigNo ratings yet
- Lookup TablesDocument7 pagesLookup TablesLebah Imoet99No ratings yet
- A Position Based Visual Tracking System For A 7 DOF Robot Manipulator Using A Kinect CameraDocument7 pagesA Position Based Visual Tracking System For A 7 DOF Robot Manipulator Using A Kinect CameraMaitriya DamaniNo ratings yet
- MC0072 Sem3 Feb 2011 SmuDocument38 pagesMC0072 Sem3 Feb 2011 SmuNitin SivachNo ratings yet
- Core Animation Enter The MatrixDocument99 pagesCore Animation Enter The MatrixtdkhoaNo ratings yet
- Dynamic Modeling and Centralized Formation Control of Mobile RobotsDocument6 pagesDynamic Modeling and Centralized Formation Control of Mobile RobotsYassine RabhiNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Formation Control of Multi-Agent Systems: A Graph Rigidity ApproachFrom EverandFormation Control of Multi-Agent Systems: A Graph Rigidity ApproachNo ratings yet
- Mama Hellen FDocument1 pageMama Hellen FMarvin ItolondoNo ratings yet
- Nwankwo Ukamaka ChiomaDocument4 pagesNwankwo Ukamaka ChiomaMarvin ItolondoNo ratings yet
- 01Document1 page01Marvin ItolondoNo ratings yet
- Vassignment 1Document4 pagesVassignment 1Marvin ItolondoNo ratings yet
- Visio-Drawing1 Copy-1691823179070Document1 pageVisio-Drawing1 Copy-1691823179070Marvin ItolondoNo ratings yet
- Yetunde Ilawole: Federal ResumeDocument3 pagesYetunde Ilawole: Federal ResumeMarvin ItolondoNo ratings yet
- Research Template FDocument7 pagesResearch Template FMarvin ItolondoNo ratings yet
- Project Designing A Habitat in MarsDocument13 pagesProject Designing A Habitat in MarsMarvin ItolondoNo ratings yet
- Visio-Drawing1 Copy-1691823179070Document1 pageVisio-Drawing1 Copy-1691823179070Marvin ItolondoNo ratings yet
- Saudi Arabia Stock MarketDocument16 pagesSaudi Arabia Stock MarketMarvin ItolondoNo ratings yet
- Geometric Design of A Highway Using Autocad Civil 3D: Presenter NameDocument11 pagesGeometric Design of A Highway Using Autocad Civil 3D: Presenter NameMarvin ItolondoNo ratings yet
- Project 1Document8 pagesProject 1Marvin ItolondoNo ratings yet
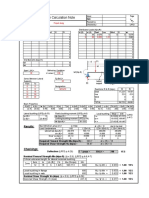
- Steel I - Beam Calculation Note Steel I - Beam Calculation NoteDocument2 pagesSteel I - Beam Calculation Note Steel I - Beam Calculation NoteMarvin ItolondoNo ratings yet
- Pipe Hanger Details 1Document1 pagePipe Hanger Details 1Marvin ItolondoNo ratings yet
- Geometric Design of A Highway Using Autocad Civil 3D: Presenter NameDocument12 pagesGeometric Design of A Highway Using Autocad Civil 3D: Presenter NameMarvin ItolondoNo ratings yet
- Question 5Document3 pagesQuestion 5Marvin ItolondoNo ratings yet
- Chapter 8 1 3125128702335289Document13 pagesChapter 8 1 3125128702335289Marvin ItolondoNo ratings yet
- Research Template FDocument7 pagesResearch Template FMarvin ItolondoNo ratings yet
- Steel I - Beam Calculation Note Steel I - Beam Calculation NoteDocument2 pagesSteel I - Beam Calculation Note Steel I - Beam Calculation NoteMarvin ItolondoNo ratings yet
- The Report: Sewer DesignDocument20 pagesThe Report: Sewer DesignMarvin ItolondoNo ratings yet
- Steel I - Beam Calculation Note Steel I - Beam Calculation NoteDocument2 pagesSteel I - Beam Calculation Note Steel I - Beam Calculation NoteMarvin ItolondoNo ratings yet
- Balcony Master Bedroom Dressing Closet: 1. StoryDocument1 pageBalcony Master Bedroom Dressing Closet: 1. StoryMarvin ItolondoNo ratings yet
- Steel I - Beam Calculation Note Steel I - Beam Calculation NoteDocument2 pagesSteel I - Beam Calculation Note Steel I - Beam Calculation NoteMarvin ItolondoNo ratings yet
- Base Project Plan Report Digital Photograph Services 2 0Document31 pagesBase Project Plan Report Digital Photograph Services 2 0Marvin ItolondoNo ratings yet
- Kabasis-16 - Fiber Manhole DetailsDocument1 pageKabasis-16 - Fiber Manhole DetailsMarvin ItolondoNo ratings yet
- CIV E 482 LAB Stormwater ManagementDocument14 pagesCIV E 482 LAB Stormwater ManagementMarvin ItolondoNo ratings yet
- Factoring The Load Demand: SolutionDocument8 pagesFactoring The Load Demand: SolutionMarvin ItolondoNo ratings yet
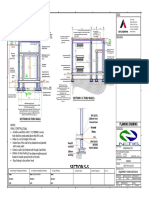
- Kabasis-10 - Equipment Room SectionsDocument1 pageKabasis-10 - Equipment Room SectionsMarvin ItolondoNo ratings yet
- Kabasis-15 - BBS Concrete Sleeper DetailsDocument1 pageKabasis-15 - BBS Concrete Sleeper DetailsMarvin ItolondoNo ratings yet
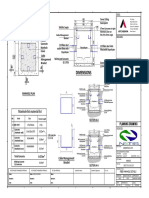
- Planning Drawing: Bts Concrete Sleepers Material ListDocument1 pagePlanning Drawing: Bts Concrete Sleepers Material ListMarvin ItolondoNo ratings yet