You might also like
- Drone CurriculumDocument9 pagesDrone CurriculumMarvellousNo ratings yet
- Graphite PropertiesDocument42 pagesGraphite PropertiesAnnisa Puspa MustikaNo ratings yet
- AD&D To BRP Second Edition ConversionDocument16 pagesAD&D To BRP Second Edition ConversionColin BrettNo ratings yet
- CRPC Bail PresentationDocument8 pagesCRPC Bail PresentationDishant ThakkarNo ratings yet
- Semantics-Ms. Minh TamDocument15 pagesSemantics-Ms. Minh TamMy Tran100% (2)
- Main Crash Course-eBook - Aerospace EngineeringDocument194 pagesMain Crash Course-eBook - Aerospace EngineeringSudarshan Dhakal100% (1)
- Linear Regression Analysis in ExcelDocument15 pagesLinear Regression Analysis in ExcelBertrand SomlareNo ratings yet
- Partograph BoDocument60 pagesPartograph BoRendy Adhitya PratamaNo ratings yet
- Modern Flexible Multi-Body Dynamics Modeling Methodology for Flapping Wing VehiclesFrom EverandModern Flexible Multi-Body Dynamics Modeling Methodology for Flapping Wing VehiclesRating: 5 out of 5 stars5/5 (1)
- Crim DigestDocument76 pagesCrim DigestBernice joyce OliverosNo ratings yet
- Understanding Uaps/Ufos: Implications for National Security and Air SafetyFrom EverandUnderstanding Uaps/Ufos: Implications for National Security and Air SafetyNo ratings yet
- CrossStitcher 2013-12 PDFDocument94 pagesCrossStitcher 2013-12 PDFmarisasusana11100% (22)
- COMPARISION STUDY - Kashmir Shaivism and Vedanta AND Par AdvaitaDocument27 pagesCOMPARISION STUDY - Kashmir Shaivism and Vedanta AND Par Advaitanmjoshi77859100% (3)
- Indoor Navigation Strategies for Aerial Autonomous SystemsFrom EverandIndoor Navigation Strategies for Aerial Autonomous SystemsRating: 5 out of 5 stars5/5 (2)
- PHILSCA-Mactan ThesisDocument96 pagesPHILSCA-Mactan ThesisNahshon YbañezNo ratings yet
- Aeronautics Classroom ProjectsDocument129 pagesAeronautics Classroom ProjectsAviation/Space History LibraryNo ratings yet
- Command-And-Control Structures For Search and Rescue DronesDocument80 pagesCommand-And-Control Structures For Search and Rescue DronesElvis TikoNo ratings yet
- General Surgery Sample TestDocument16 pagesGeneral Surgery Sample TestNix14No ratings yet
- (PD ISO GUIDE 30) - Reference Materials. Selected Terms and DefinitionsDocument16 pages(PD ISO GUIDE 30) - Reference Materials. Selected Terms and DefinitionsCarolinaNo ratings yet
- Design and Fabrication of Arial Vehicle For Elegant AgricultureDocument74 pagesDesign and Fabrication of Arial Vehicle For Elegant AgricultureNoorul HassanNo ratings yet
- Hope DroneDocument2 pagesHope DroneDan Jenniel CedeñoNo ratings yet
- Group-5-Thesis (No ToC 0 Title) FINALDocument39 pagesGroup-5-Thesis (No ToC 0 Title) FINALRona Mae MirandaNo ratings yet
- Development of Rescue Material Transport UAV (Unmanned Aerial Vehicle)Document10 pagesDevelopment of Rescue Material Transport UAV (Unmanned Aerial Vehicle)dosabikNo ratings yet
- Hope DroneDocument2 pagesHope DroneDan Jenniel CedeñoNo ratings yet
- ICIRA201 AKindofLarge SizedFlappingWingRoboticBird DesignandExperimentsDocument14 pagesICIRA201 AKindofLarge SizedFlappingWingRoboticBird DesignandExperimentsSHARONNo ratings yet
- K.V Physics InvestigatoryDocument18 pagesK.V Physics InvestigatoryDEVANSHNo ratings yet
- DRONESDocument12 pagesDRONESroshini pillaiNo ratings yet
- Ar Drone Research PaperDocument6 pagesAr Drone Research Paperpeputaqlg100% (1)
- 10 Uses of Drones in Higher Education (Slideshare) Vala AfsharDocument2 pages10 Uses of Drones in Higher Education (Slideshare) Vala AfshartmsaiNo ratings yet
- TIS FlightExDocument1 pageTIS FlightExSpace Frontier FoundationNo ratings yet
- Development of An Unmanned Helicopter For Vertical Replenishment (2015)Document25 pagesDevelopment of An Unmanned Helicopter For Vertical Replenishment (2015)Mariela TisseraNo ratings yet
- Group 2 Drone The Future of Delivery FinalDocument31 pagesGroup 2 Drone The Future of Delivery FinalJhalak VarshneyNo ratings yet
- Vulture - The Unmanned Aircraft by NasaDocument3 pagesVulture - The Unmanned Aircraft by NasaSherry SherNo ratings yet
- Vulture - The Unmanned Aircraft by NasaDocument3 pagesVulture - The Unmanned Aircraft by NasaSherry SherNo ratings yet
- Spacex-3 Cargo By-The-Numbers and Science Highlights Launch: Approximately 2.4 TonsDocument2 pagesSpacex-3 Cargo By-The-Numbers and Science Highlights Launch: Approximately 2.4 TonsAlejandro Kanito Alvarez SNo ratings yet
- Ebook: Drones (English)Document27 pagesEbook: Drones (English)BBVA Innovation CenterNo ratings yet
- Worksheet 2.1 and 2.2Document4 pagesWorksheet 2.1 and 2.2Mae NedrodaNo ratings yet
- Bab Avt 2218 Prelim Module No.1Document17 pagesBab Avt 2218 Prelim Module No.1Marc Oliver NabablitNo ratings yet
- 2nd Partial Reading-ListeningDocument14 pages2nd Partial Reading-ListeningEric MartínezNo ratings yet
- Fact Sheet Civil Air Patrol 2017Document2 pagesFact Sheet Civil Air Patrol 2017jorge_ruiz_100No ratings yet
- AeroPac 2012 100k' Program Report - CompressedDocument100 pagesAeroPac 2012 100k' Program Report - Compressedjdemula100% (1)
- Keshav PPT UAVDocument18 pagesKeshav PPT UAVmirtunjaya goswamiNo ratings yet
- Solucion Paeg Ingles 2017Document6 pagesSolucion Paeg Ingles 2017fdestaNo ratings yet
- St. Louise de Marillac College of BogoDocument27 pagesSt. Louise de Marillac College of BogoRenz LephoenixNo ratings yet
- Philippine State College of Aeronautics Institute of Engineering and TechnologyDocument41 pagesPhilippine State College of Aeronautics Institute of Engineering and TechnologyChristian PuntoNo ratings yet
- Autonomous Aerial VehiclesDocument15 pagesAutonomous Aerial VehiclesRathiya ArifNo ratings yet
- My Project WorkDocument32 pagesMy Project WorkABUR DANIELNo ratings yet
- Singapore Space Challenge 2019/2020: Presentation OnDocument23 pagesSingapore Space Challenge 2019/2020: Presentation Onbal_thakreNo ratings yet
- Understanding Flight 2001 AppendexDocument6 pagesUnderstanding Flight 2001 AppendexNayot TientongNo ratings yet
- Interview Article PNST2021 Fatima DuranDocument5 pagesInterview Article PNST2021 Fatima DuranJorge MartínezNo ratings yet
- QuadcopterDocument24 pagesQuadcoptervishalNo ratings yet
- 1159pm 20.epra Journals-6704Document7 pages1159pm 20.epra Journals-6704Akash ShevateNo ratings yet
- Conference Paper Zi HaoDocument7 pagesConference Paper Zi HaoLady Katherine Gomez SamboniNo ratings yet
- NFLC in Flight MagazineDocument35 pagesNFLC in Flight MagazineneerajmprakashNo ratings yet
- Ornithoptr 002Document3 pagesOrnithoptr 002Raj KoushikNo ratings yet
- PDSMTP To Minimise TimeDocument19 pagesPDSMTP To Minimise TimeAbhinavNo ratings yet
- Naval Postgraduate School Thesis SearchDocument4 pagesNaval Postgraduate School Thesis Searchjuliasolembellevue100% (2)
- Timcang Onl Final LP For Demo 03-23-2024Document11 pagesTimcang Onl Final LP For Demo 03-23-2024api-712751233No ratings yet
- Path PlanDocument9 pagesPath Plan20pd23No ratings yet
- (0-2023) Autonomous Drone Racing - A SurveyDocument20 pages(0-2023) Autonomous Drone Racing - A SurveyBach NguyenNo ratings yet
- Impact of Programming Robots and Drones On STEM AttitudesDocument7 pagesImpact of Programming Robots and Drones On STEM AttitudesjiaweideNo ratings yet
- A Review On Applications of Rotary-Wing Unmanned Aerial Vehicle Charging StationsDocument20 pagesA Review On Applications of Rotary-Wing Unmanned Aerial Vehicle Charging StationsZakky NurshidiqNo ratings yet
- Balloonlaunch 1 ReportDocument4 pagesBalloonlaunch 1 Reportapi-285493098No ratings yet
- DroneDocument19 pagesDroneArchit SomaniNo ratings yet
- Airplane Accidents Research PaperDocument7 pagesAirplane Accidents Research Paperc9spy2qz100% (1)
- Drones For Search and Rescue OperationsDocument3 pagesDrones For Search and Rescue OperationsJomari A. CruzNo ratings yet
- TemplateDocument9 pagesTemplateDan Jenniel CedeñoNo ratings yet
- Keshav PPT UAVDocument18 pagesKeshav PPT UAVmirtunjaya goswamiNo ratings yet
- Research III - Life Science Rationale Group 10Document1 pageResearch III - Life Science Rationale Group 10Dan Jenniel CedeñoNo ratings yet
- Title DefenseDocument6 pagesTitle DefenseDan Jenniel CedeñoNo ratings yet
- RationaleDocument1 pageRationaleDan Jenniel CedeñoNo ratings yet
- RationaleDocument1 pageRationaleDan Jenniel CedeñoNo ratings yet
- Title DefenseDocument5 pagesTitle DefenseDan Jenniel CedeñoNo ratings yet
- Applied Science RATIONALE Group 9Document2 pagesApplied Science RATIONALE Group 9Dan Jenniel CedeñoNo ratings yet
- Title DefenseDocument6 pagesTitle DefenseDan Jenniel CedeñoNo ratings yet
- Document Cover Page TemplateDocument5 pagesDocument Cover Page TemplateDan Jenniel CedeñoNo ratings yet
- Physical Research RationaleDocument2 pagesPhysical Research RationaleDan Jenniel CedeñoNo ratings yet
- Research III Title Defense Roboticseto Na Dan Ayus NaDocument8 pagesResearch III Title Defense Roboticseto Na Dan Ayus NaDan Jenniel CedeñoNo ratings yet
- Rationale of The StudyDocument1 pageRationale of The StudyDan Jenniel CedeñoNo ratings yet
- Applied Science RATIONALE Group 9Document2 pagesApplied Science RATIONALE Group 9Dan Jenniel CedeñoNo ratings yet
- Title Defense River Flood Monitoring SystemDocument5 pagesTitle Defense River Flood Monitoring SystemDan Jenniel CedeñoNo ratings yet
- Document 1Document5 pagesDocument 1Dan Jenniel CedeñoNo ratings yet
- Hope Drone PaperDocument6 pagesHope Drone PaperDan Jenniel CedeñoNo ratings yet
- Title Defense Chili PlantDocument5 pagesTitle Defense Chili PlantDan Jenniel CedeñoNo ratings yet
- Research III - Life Science Rationale Group 10Document1 pageResearch III - Life Science Rationale Group 10Dan Jenniel CedeñoNo ratings yet
- Research III Title Defense Roboticseto Na Dan Ayus NaDocument8 pagesResearch III Title Defense Roboticseto Na Dan Ayus NaDan Jenniel CedeñoNo ratings yet
- Document 1Document5 pagesDocument 1Dan Jenniel CedeñoNo ratings yet
- TemplateDocument9 pagesTemplateDan Jenniel CedeñoNo ratings yet
- Robotics Research PlanDocument9 pagesRobotics Research PlanDan Jenniel CedeñoNo ratings yet
- Niccolopaganini3 151003091516 Lva1 App6891Document7 pagesNiccolopaganini3 151003091516 Lva1 App6891Dan Jenniel CedeñoNo ratings yet
- TemplateDocument9 pagesTemplateDan Jenniel CedeñoNo ratings yet
- Fiitjee: Review Test - 07Document32 pagesFiitjee: Review Test - 07yashik goyalNo ratings yet
- Basic Competence of English SMP MTS SMADocument43 pagesBasic Competence of English SMP MTS SMAMuhammad Ibnu SyamNo ratings yet
- Contact Info and ContractDocument3 pagesContact Info and ContractJojimar Kenneth GonowonNo ratings yet
- Baru PDFDocument4 pagesBaru PDFshribarathiNo ratings yet
- What Is The Use of Accord Powder?Document3 pagesWhat Is The Use of Accord Powder?ivy l.sta.mariaNo ratings yet
- ESP Test 1 Part 1 AnswersDocument5 pagesESP Test 1 Part 1 Answerschemistry_mwuNo ratings yet
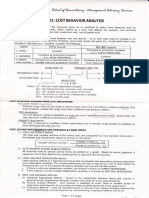
- 01 - Cost Behavior AnalysisDocument4 pages01 - Cost Behavior AnalysisVince De GuzmanNo ratings yet
- Factors Influencing Brand Loyalty For Samsung Mobile User in Nepal - With QuestionnaireDocument70 pagesFactors Influencing Brand Loyalty For Samsung Mobile User in Nepal - With QuestionnairevictorNo ratings yet
- JSPS Application GuidelinesDocument9 pagesJSPS Application GuidelinesNihad AdnanNo ratings yet
- Research Ni Mang JoshuaDocument1 pageResearch Ni Mang JoshuaAaron Joshua AguinaldoNo ratings yet
- CPP MCQ - Control Flow Statements PDFDocument2 pagesCPP MCQ - Control Flow Statements PDFBlackk WorldzNo ratings yet
- Durga Anand Sanipilli: Obile Mail Nandsanipilli Gmail COMDocument3 pagesDurga Anand Sanipilli: Obile Mail Nandsanipilli Gmail COMDurgaAnandNo ratings yet
- Stage 1 English Curriculum Framework PDFDocument2 pagesStage 1 English Curriculum Framework PDFMangunatun KhasanahNo ratings yet
- 12A & 80G ProcedureDocument4 pages12A & 80G ProcedurekshripalNo ratings yet
- Pengolahan Rebung Sebagai Pangan Fungsional Sumber SeratDocument8 pagesPengolahan Rebung Sebagai Pangan Fungsional Sumber SeratXII MIPA 3 Nenni FiqianaNo ratings yet
- GaurGopalDas ReportDocument3 pagesGaurGopalDas Reportdr.menganeNo ratings yet
- Our Cover Is Definitely The Reason Why We Would Choose This Book in A BookstoreDocument1 pageOur Cover Is Definitely The Reason Why We Would Choose This Book in A BookstoreSlobaKuzmanovicNo ratings yet
- Transactional Analysis An Enlightened Expansion For The FutureDocument5 pagesTransactional Analysis An Enlightened Expansion For The FutureNarcis NagyNo ratings yet
- Prediction of Return EductorDocument11 pagesPrediction of Return EductorToti TotiNo ratings yet