You might also like
- Afnr 2 3 Gallery WalkDocument10 pagesAfnr 2 3 Gallery Walkapi-194233155No ratings yet
- 9 The M/G/1 System: 9.1 The Queue Length Distribution On Departure InstantsDocument8 pages9 The M/G/1 System: 9.1 The Queue Length Distribution On Departure InstantsКлара АндрееваNo ratings yet
- Department of Electrical Engineering School of Science and Engineering EE514/CS535 Machine Learning Homework 2Document8 pagesDepartment of Electrical Engineering School of Science and Engineering EE514/CS535 Machine Learning Homework 2Muhammad HusnainNo ratings yet
- Homework Assignment 9: Solutions: ′ ′ ′ ′ 2 3 n exp (Πu) cosh u even 1 2 odd 1 2 u→∞ u→−∞Document7 pagesHomework Assignment 9: Solutions: ′ ′ ′ ′ 2 3 n exp (Πu) cosh u even 1 2 odd 1 2 u→∞ u→−∞Eusébio AdãoNo ratings yet
- BlogDocument2 pagesBlogHeidiNo ratings yet
- FORMULAS Eng 2020FDocument1 pageFORMULAS Eng 2020FAkash TomNo ratings yet
- P (B !A) P (B) P (A!B) P (B) P (A!B) : 1 F (X) (X) DXDocument2 pagesP (B !A) P (B) P (A!B) P (B) P (A!B) : 1 F (X) (X) DXFrancisco Javier Colli PintoNo ratings yet
- Chapter 5: Correlation and Linear Regression: Phan Thi Khanh VanDocument19 pagesChapter 5: Correlation and Linear Regression: Phan Thi Khanh VanHuỳnh Nhật HàoNo ratings yet
- ANA Seminar1a Introducere CDocument14 pagesANA Seminar1a Introducere CManciu Mihai CosminNo ratings yet
- Department of Mathematics Indian Institute of Technology GuwahatiDocument3 pagesDepartment of Mathematics Indian Institute of Technology GuwahatilekhanasriNo ratings yet
- Super Dense Coding Over Bit Flip Channel: April 9, 2014Document3 pagesSuper Dense Coding Over Bit Flip Channel: April 9, 2014raina_nitkNo ratings yet
- IMOmath - Applications of CalculusDocument4 pagesIMOmath - Applications of CalculusThang ThangNo ratings yet
- IMOmath - Applications of CalculusDocument4 pagesIMOmath - Applications of CalculusThang ThangNo ratings yet
- FormulasDocument1 pageFormulasKarabo LepotaNo ratings yet
- Maximum LikelihoodDocument7 pagesMaximum LikelihoodShaibal BaruaNo ratings yet
- CH 4Document33 pagesCH 4hung13579No ratings yet
- STAT-36700 Homework 4 - Solutions: Fall 2018 September 28, 2018Document14 pagesSTAT-36700 Homework 4 - Solutions: Fall 2018 September 28, 2018DRizky Aziz SyaifudinNo ratings yet
- Series de FourierDocument6 pagesSeries de Fourierjulio daniel jaime garciaNo ratings yet
- Lec 5 STA 403 Non Parametric MethodsDocument4 pagesLec 5 STA 403 Non Parametric MethodsKibetNo ratings yet
- Chapter 6 Period, Ergodic, Communicate (Lecture On 01-21-2021) - STAT 243 - Stochastic ProcessDocument4 pagesChapter 6 Period, Ergodic, Communicate (Lecture On 01-21-2021) - STAT 243 - Stochastic ProcessProf. Madya Dr. Umar Yusuf MadakiNo ratings yet
- P-Adic Analysis Compared To Real, Lecture 3 - C. Hüni, K. Naef, D. SchmitterDocument10 pagesP-Adic Analysis Compared To Real, Lecture 3 - C. Hüni, K. Naef, D. Schmitterpeter.eggerNo ratings yet
- Polynomials J Ainsworth Dec21Document4 pagesPolynomials J Ainsworth Dec21Jason Wenxuan MIAONo ratings yet
- Herstein Topics in Algebra Solution 5 5Document6 pagesHerstein Topics in Algebra Solution 5 5NandhiniNo ratings yet
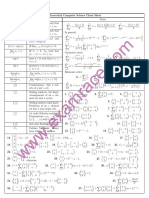
- Computer Science FormulasDocument10 pagesComputer Science FormulasSheeraz AhmedNo ratings yet
- Real 11Document6 pagesReal 11spadhiNo ratings yet
- AEM 3e Chapter 12Document15 pagesAEM 3e Chapter 12AKIN ERENNo ratings yet
- Final CodesDocument77 pagesFinal Codesprakhar agrawalNo ratings yet
- MSS 321 Tutorial 1Document3 pagesMSS 321 Tutorial 1Melchizedek MashamboNo ratings yet
- Pset6 SolutionsDocument2 pagesPset6 SolutionsMichel Julien Ngessi FilsNo ratings yet
- Prof. M. Saha: Professor of Mathematics The University of Burdwan West Bengal, IndiaDocument5 pagesProf. M. Saha: Professor of Mathematics The University of Burdwan West Bengal, Indiaribeiro_sucessoNo ratings yet
- Notes: Edited by Jimmie D. Lawson and William AdkinsDocument20 pagesNotes: Edited by Jimmie D. Lawson and William AdkinsumerfarooqueNo ratings yet
- 13-22 Theory of EqDocument41 pages13-22 Theory of EqEquation Learning-YTNo ratings yet
- MDM4U Formula Sheet New 2021Document2 pagesMDM4U Formula Sheet New 2021Andrew StewardsonNo ratings yet
- Vinay Bharadwaj DS (2147326)Document4 pagesVinay Bharadwaj DS (2147326)VINAY BHARADWAJ DS 2147326No ratings yet
- s131 Reviewer 002Document14 pagess131 Reviewer 002lucy heartfiliaNo ratings yet
- The Exponential Function As A LimitDocument9 pagesThe Exponential Function As A LimitSebastian De BortoliNo ratings yet
- China China Girls Math Olympiad 2006Document2 pagesChina China Girls Math Olympiad 2006PremMehtaNo ratings yet
- Oscillator-Coherent StatesDocument30 pagesOscillator-Coherent Statesivan kikungaNo ratings yet
- Homework 5: SolutionsDocument2 pagesHomework 5: SolutionsSabat UmarNo ratings yet
- CRCT TD2Document5 pagesCRCT TD2abraham LincolnNo ratings yet
- Polinomio CaracteristicoDocument8 pagesPolinomio Caracteristicopepillo2013No ratings yet
- Sufficient 6Document3 pagesSufficient 6RHLNo ratings yet
- Lecture5 Properties of Prob MeasuresDocument4 pagesLecture5 Properties of Prob Measuressourav kumar rayNo ratings yet
- Lecture 26 - Logistic RegressionDocument4 pagesLecture 26 - Logistic RegressionTBaenasNo ratings yet
- S1 T01 Tabla DistribucionesDocument2 pagesS1 T01 Tabla DistribucionesPruebasNo ratings yet
- Cheat SheetDocument5 pagesCheat SheetAsdNo ratings yet
- Logistic RegressionDocument30 pagesLogistic RegressionUTKARSH PABALENo ratings yet
- Formula FileDocument2 pagesFormula FileCatherine ShendreNo ratings yet
- PP 03 SolnDocument13 pagesPP 03 SolnKiyan RoyNo ratings yet
- Imc2023 Day1 SolutionsDocument5 pagesImc2023 Day1 SolutionsAngga NurohmanNo ratings yet
- l3 ML PDFDocument24 pagesl3 ML PDFjuanagallardo01No ratings yet
- PIB - Numerical Analysis I - Iserles (2010) 41pgDocument41 pagesPIB - Numerical Analysis I - Iserles (2010) 41pgfdsdsfsdfmgNo ratings yet
- 1 R 1+r R 1 RDocument4 pages1 R 1+r R 1 RFaiz AnwarNo ratings yet
- Queueing TheoryDocument2 pagesQueueing Theorybluepearl576No ratings yet
- Lecture 8: Computing The Matrix Exponential: N×N N×N I JDocument3 pagesLecture 8: Computing The Matrix Exponential: N×N N×N I JBabiiMuffinkNo ratings yet
- On A Particular Extension of The EV-Theorem: Print Edition: ISSN 1584 - 286X Online Edition: ISSN 1843 - 441XDocument12 pagesOn A Particular Extension of The EV-Theorem: Print Edition: ISSN 1584 - 286X Online Edition: ISSN 1843 - 441XSerban Dan100% (1)
- Spring 2009Document4 pagesSpring 2009Robinson Ortega MezaNo ratings yet
- Stats2 Quiz2 FormulaDocument2 pagesStats2 Quiz2 Formulagc15.th47No ratings yet
- Sec 1-1Document10 pagesSec 1-1Metin DenizNo ratings yet
- An Introduction to Linear Algebra and TensorsFrom EverandAn Introduction to Linear Algebra and TensorsRating: 1 out of 5 stars1/5 (1)
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970From EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNo ratings yet
- Full 206 PracticumDocument10 pagesFull 206 Practicumapi-280455478No ratings yet
- CK-12-Trigonometry-Concepts B v1 XDD s1Document431 pagesCK-12-Trigonometry-Concepts B v1 XDD s1Gilberto Rodrigues Pimentel Junior100% (2)
- 6Th Grade Outdoor Education Update Parents: Dr. Rachel Heide, Assistant PrincipDocument5 pages6Th Grade Outdoor Education Update Parents: Dr. Rachel Heide, Assistant PrincipnjtomlinsonNo ratings yet
- Name of Learner by Purok - G10Document16 pagesName of Learner by Purok - G10Ronel MadrioNo ratings yet
- XPY Paper 2Document23 pagesXPY Paper 2Lim Wai Wai SmktpNo ratings yet
- Calbayog City National High SchoolDocument6 pagesCalbayog City National High Schooljun del rosarioNo ratings yet
- 15 Hkeaa M MC CirclesDocument6 pages15 Hkeaa M MC CirclesHoi kiu WuNo ratings yet
- The Steps To Make and Draw Median, Altitude, Bisector: in A TriangleDocument11 pagesThe Steps To Make and Draw Median, Altitude, Bisector: in A TriangleFirda LudfiyahNo ratings yet
- 2015 Basic Geometry AnswersDocument40 pages2015 Basic Geometry AnswersPrincess BlytheNo ratings yet
- Slope of The Tangent LineDocument18 pagesSlope of The Tangent LineCylyn CapangpanganNo ratings yet
- Section 11.3, Conic Sections - The EllipseDocument4 pagesSection 11.3, Conic Sections - The EllipseBookworm PhamNo ratings yet
- February Newsletter 2016Document6 pagesFebruary Newsletter 2016api-281752017No ratings yet
- Delta Center Dateliner: Calendar of EventsDocument2 pagesDelta Center Dateliner: Calendar of Eventsapi-244140171No ratings yet
- WRC 107 Amp 297 - CompressDocument10 pagesWRC 107 Amp 297 - CompressAkhil JoseNo ratings yet
- Consolidated Report On Early Registration Day: As of Jan. 27, 2018Document6 pagesConsolidated Report On Early Registration Day: As of Jan. 27, 2018Juanalyn CalibogNo ratings yet
- Objectives:: Detailed Lesson Plan in KINDERGARTEN For The Fourth Quarter Work Period 1 TimeDocument3 pagesObjectives:: Detailed Lesson Plan in KINDERGARTEN For The Fourth Quarter Work Period 1 TimeLileth Delos Reyes BernardinoNo ratings yet
- Ellipse ConstructionDocument5 pagesEllipse ConstructionOyedotun TundeNo ratings yet
- Geometry in The Real WorldDocument22 pagesGeometry in The Real Worldapi-276003028No ratings yet
- SPM Mathematics PresentationDocument30 pagesSPM Mathematics PresentationKnk Resources CornerNo ratings yet
- OutsDocument5 pagesOutsVersoza NelNo ratings yet
- 1062 X Maths Support Material Key Points HOTS and VBQ 2014 15Document406 pages1062 X Maths Support Material Key Points HOTS and VBQ 2014 15KAPIL SHARMA0% (1)
- Math 113, Homework 5Document7 pagesMath 113, Homework 5MirandaNo ratings yet
- SPM Add Math Form 5 Chapter 4 VectorDocument6 pagesSPM Add Math Form 5 Chapter 4 VectorRuban RubanNo ratings yet
- 3 Point Problems: Problem 01Document6 pages3 Point Problems: Problem 01Syed Hamza TariqNo ratings yet
- 05042016211550Document5 pages05042016211550api-312383304No ratings yet
- TranscriptDocument4 pagesTranscriptapi-284002404No ratings yet
- Geometry 5 5 - 5 6Document31 pagesGeometry 5 5 - 5 6api-300866876No ratings yet
- Properties of ConicsDocument22 pagesProperties of Conicssmhsyasirahmad10a.51No ratings yet
- Molly Brown: Box 290314, Birmingham, Alabama 35229 / (205) 814-8348Document3 pagesMolly Brown: Box 290314, Birmingham, Alabama 35229 / (205) 814-8348api-273421991No ratings yet