You might also like
- Topological Spaces ExplainedDocument15 pagesTopological Spaces ExplainedKofi Appiah-Danquah100% (1)
- MergedDocument66 pagesMergedSoumyajoy DasNo ratings yet
- Closed Sets, Closures, and Density: 1 MotivationDocument7 pagesClosed Sets, Closures, and Density: 1 MotivationtesfayeteferiNo ratings yet
- Summary 1Document20 pagesSummary 1Javed AnsariNo ratings yet
- Lecture 01 Functional Analysis Week01 V2Document16 pagesLecture 01 Functional Analysis Week01 V2Javi ErNo ratings yet
- Math 404 Lecture NotesDocument31 pagesMath 404 Lecture NotesOmegaUserNo ratings yet
- 1 Motivation and Foreshadowing: C 2018 - Ivan KhatchatourianDocument6 pages1 Motivation and Foreshadowing: C 2018 - Ivan KhatchatourianDouglasNo ratings yet
- Topological Vector SpacesDocument58 pagesTopological Vector SpacesMilana SavicNo ratings yet
- Chapter 2Document20 pagesChapter 2Dennis TheetasNo ratings yet
- Topology Lecture Notes (UEA, 2001) - ThomasWardDocument92 pagesTopology Lecture Notes (UEA, 2001) - ThomasWardKopaka LewaNo ratings yet
- Topology Course Lecture NotesDocument49 pagesTopology Course Lecture NotesAlex LeeNo ratings yet
- Separation Axioms 2009 MalestromDocument4 pagesSeparation Axioms 2009 MalestromKhmer ChamNo ratings yet
- Metric Spaces ExplainedDocument42 pagesMetric Spaces ExplainedAmol MittalNo ratings yet
- Week 1: "Topological Spaces": NotationsDocument16 pagesWeek 1: "Topological Spaces": NotationscharlyshakaNo ratings yet
- Understand Open and Closed Sets in Real AnalysisDocument11 pagesUnderstand Open and Closed Sets in Real AnalysiszanibabNo ratings yet
- MSC General Topology Azhar HussainDocument20 pagesMSC General Topology Azhar HussainAmir AliNo ratings yet
- Discrete SpaceDocument2 pagesDiscrete SpaceNilesh PatilNo ratings yet
- Screenshot 2020-04-03 at 11.48.33Document11 pagesScreenshot 2020-04-03 at 11.48.33robertson.christian4114No ratings yet
- ANALYSIS4: THU, SEP 12, 2013 Printed: September 17, 2013 (LEC# 4)Document7 pagesANALYSIS4: THU, SEP 12, 2013 Printed: September 17, 2013 (LEC# 4)ramboriNo ratings yet
- Point Set Topology From MathCamp 2011Document17 pagesPoint Set Topology From MathCamp 2011Tommy TangNo ratings yet
- Christian Remling: N N N J J P 1/pDocument11 pagesChristian Remling: N N N J J P 1/pJuan David TorresNo ratings yet
- Topology 464Document76 pagesTopology 464Zhang Xue PengNo ratings yet
- Essential Topology Chapter 3Document7 pagesEssential Topology Chapter 3GoranHuyghNo ratings yet
- Course 421: Algebraic Topology Section 1: Topological SpacesDocument23 pagesCourse 421: Algebraic Topology Section 1: Topological SpacesAshish VermaNo ratings yet
- Functional AnalysisDocument64 pagesFunctional AnalysisASHIK100% (1)
- Chapter 5 Limit PointsDocument10 pagesChapter 5 Limit Pointspat jabNo ratings yet
- Topologist Sine CurveDocument2 pagesTopologist Sine CurveYogesh RanaNo ratings yet
- Honors Advanced Calculus and Linear Algebra 1 p3 PDFDocument2 pagesHonors Advanced Calculus and Linear Algebra 1 p3 PDFmarchelo_cheloNo ratings yet
- Topological Mathematical PapersDocument3 pagesTopological Mathematical PapersDefinitely JunkieNo ratings yet
- 2.1 TopologyDocument12 pages2.1 TopologymukulNo ratings yet
- Review of Topology Concepts in Metric SpacesDocument4 pagesReview of Topology Concepts in Metric SpacesPrivate27No ratings yet
- Topological Spaces: SpaceDocument9 pagesTopological Spaces: SpaceJuwandaNo ratings yet
- Introduction To Real Analysis: 1 SetsDocument8 pagesIntroduction To Real Analysis: 1 SetsKiki Rizki ArpiandiNo ratings yet
- Point-Set Topology 2: Connectedness and Metric SpacesDocument5 pagesPoint-Set Topology 2: Connectedness and Metric SpacesNilesh PatilNo ratings yet
- Connected l1Document4 pagesConnected l1Grace HoagnNo ratings yet
- Almost Continuous Function in TopologyDocument39 pagesAlmost Continuous Function in TopologyS.Ramesh Senthil kumarNo ratings yet
- MathAnalysis4 13 DraftDocument6 pagesMathAnalysis4 13 DraftramboriNo ratings yet
- Set Theory by SM SrivastavaDocument37 pagesSet Theory by SM SrivastavaRAMJANNo ratings yet
- Metric Space: X X y yDocument20 pagesMetric Space: X X y yWazha MmerekiNo ratings yet
- Lecture Notes on General TopologyDocument20 pagesLecture Notes on General Topologygulfam100% (2)
- Topology of the Real NumbersDocument20 pagesTopology of the Real NumbersJeoff Libo-onNo ratings yet
- MSM3P22/MSM4P22 Further Complex Variable Theory & General Topology Solutions To Problem Sheet 2Document4 pagesMSM3P22/MSM4P22 Further Complex Variable Theory & General Topology Solutions To Problem Sheet 2Duano Sapta NNo ratings yet
- Sample Exam, F11PE Solutions, Topology, Autumn 2011Document5 pagesSample Exam, F11PE Solutions, Topology, Autumn 2011Jeoff Libo-onNo ratings yet
- Sample Exam, F10PC Solutions, Topology, Autumn 2011Document5 pagesSample Exam, F10PC Solutions, Topology, Autumn 2011JenifaNo ratings yet
- HedmarkDocument13 pagesHedmarkEpic WinNo ratings yet
- Countability axioms and separation properties in topological spacesDocument13 pagesCountability axioms and separation properties in topological spacesMohammad SaubanNo ratings yet
- Topology For DummiesDocument9 pagesTopology For Dummiescuto9No ratings yet
- Ma651 Topology Lecture 6 Separation AxiomsDocument16 pagesMa651 Topology Lecture 6 Separation Axiomsfarsamuels183No ratings yet
- Intro To TopologyDocument6 pagesIntro To TopologyYERRAMILLI SRIVATSAVNo ratings yet
- ExercisesDocument7 pagesExercisesKhoa NgôNo ratings yet
- On Topology: Definitions and Examples and Preliminary TermsDocument14 pagesOn Topology: Definitions and Examples and Preliminary TermsShoaib ChNo ratings yet
- IntroRealAnal ch05Document14 pagesIntroRealAnal ch05Ask Bulls BearNo ratings yet
- Math 535 - General TopologyDocument40 pagesMath 535 - General TopologyFabian MolinaNo ratings yet
- Mathanalysis4 04Document5 pagesMathanalysis4 04이태호No ratings yet
- Matrix Rank, Nullity, and Determinant PropertiesDocument7 pagesMatrix Rank, Nullity, and Determinant PropertiesEagle StalloneNo ratings yet
- TopologiaDocument67 pagesTopologiaLuis MatuteNo ratings yet
- Metric Spaces: 1. Basic Notation and TerminologyDocument16 pagesMetric Spaces: 1. Basic Notation and TerminologyAloyana Couto da SilvaNo ratings yet
- Toplogy NotesDocument83 pagesToplogy NotesDebrup PaulNo ratings yet
- Elgenfunction Expansions Associated with Second Order Differential EquationsFrom EverandElgenfunction Expansions Associated with Second Order Differential EquationsNo ratings yet
- VectorAnalysis 10032899Document453 pagesVectorAnalysis 10032899Soma GhoshNo ratings yet
- Lecture Notes Vector Analysis MATH 332: Ivan AvramidiDocument118 pagesLecture Notes Vector Analysis MATH 332: Ivan AvramidiAdewole Adeyemi Charles100% (3)
- Topology of The Line and PlaneDocument19 pagesTopology of The Line and PlaneUrlsrings NdedaNo ratings yet
- Metric and Normed SpacesDocument20 pagesMetric and Normed SpacesUrlsrings NdedaNo ratings yet
- Partial Sums of Random Multiplicative Functions and Extreme Values of A Model For The Riemann Zeta Function Authors - Marco Aymone, Winston Heap, Jing Zhao - Soundararajan-Radziwill-Gesprach-SeipDocument31 pagesPartial Sums of Random Multiplicative Functions and Extreme Values of A Model For The Riemann Zeta Function Authors - Marco Aymone, Winston Heap, Jing Zhao - Soundararajan-Radziwill-Gesprach-SeipSam TaylorNo ratings yet
- Music in The Philosophy of BoethiusDocument14 pagesMusic in The Philosophy of BoethiusKATPONS100% (2)
- Chapter 8 Part 2 Distribution ModelDocument23 pagesChapter 8 Part 2 Distribution ModelernieNo ratings yet
- The Distance Between The Circumcenter and Any Point in The Plane of The TriangleDocument10 pagesThe Distance Between The Circumcenter and Any Point in The Plane of The Trianglevijay9290009015No ratings yet
- DAA-Practical ListDocument2 pagesDAA-Practical ListSetu PatelNo ratings yet
- The Learner Will Demonstrate An Understanding of Simple Algebraic ExpressionsDocument12 pagesThe Learner Will Demonstrate An Understanding of Simple Algebraic ExpressionsNeha SinghNo ratings yet
- M1: Numerical Methods Intro Discrete Algebra Accuracy ErrorsDocument40 pagesM1: Numerical Methods Intro Discrete Algebra Accuracy ErrorsCollano M. Noel RogieNo ratings yet
- Series Tips and TricksDocument5 pagesSeries Tips and TricksAzharAslamRajNo ratings yet
- Lid DiagramDocument4 pagesLid DiagramPrajwalNo ratings yet
- Chapter 1 (Philoid-In)Document19 pagesChapter 1 (Philoid-In)govindNo ratings yet
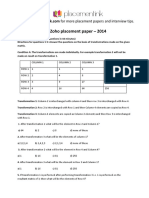
- Zoho placement paper - 2014 interview tips and matrix questionsDocument6 pagesZoho placement paper - 2014 interview tips and matrix questionsSathiya NarayananNo ratings yet
- Mathematical Methods Units 1 2 AC VCE - Chapter 2Document48 pagesMathematical Methods Units 1 2 AC VCE - Chapter 2lequanplusNo ratings yet
- Holiday Assignment FunctionsDocument31 pagesHoliday Assignment FunctionsGaurav YadavNo ratings yet
- A Concise Introduction To Numerical AnalysisDocument213 pagesA Concise Introduction To Numerical AnalysisstanicadNo ratings yet
- EECS2030 Proofs of Correctness and Termination PDFDocument9 pagesEECS2030 Proofs of Correctness and Termination PDFGabito EssienNo ratings yet
- PDF For Color Printout1Document6 pagesPDF For Color Printout1ankit kumarNo ratings yet
- Digital Unit Plan TemplateDocument3 pagesDigital Unit Plan Templateapi-239653134No ratings yet
- Real Analysis II Homework 2 QuestionsDocument6 pagesReal Analysis II Homework 2 QuestionsLinden JavaScriptNo ratings yet
- Solving Zero-Dimensional Algebraic SystemsDocument15 pagesSolving Zero-Dimensional Algebraic SystemsAnonymous Tph9x741No ratings yet
- University of Cambridge International Examinations: General Certificate of Education Ordinary LevelDocument20 pagesUniversity of Cambridge International Examinations: General Certificate of Education Ordinary LevelTF PlaysNo ratings yet
- Week 1. Day 1 (Lesson1)Document9 pagesWeek 1. Day 1 (Lesson1)Dindin Oromedlav LoricaNo ratings yet
- ReasoningDocument5 pagesReasoningSmritiNo ratings yet
- Path Analysis and SEM with AMOSDocument11 pagesPath Analysis and SEM with AMOSSajid hussain awanNo ratings yet
- Class V Maths Annual 2017 18Document9 pagesClass V Maths Annual 2017 18Pravat TiadiNo ratings yet
- Block 3 MECE 001 Unit 10Document16 pagesBlock 3 MECE 001 Unit 10Tanya Singh100% (1)
- CT753 - 2020 08 29T04 26 21.878Z - Simulation - ModelingDocument73 pagesCT753 - 2020 08 29T04 26 21.878Z - Simulation - ModelingAnish shahNo ratings yet
- Gen-Math-Work-Text-Operations and Composition-Of-FunctionsDocument9 pagesGen-Math-Work-Text-Operations and Composition-Of-FunctionsIRIS JEAN BRIAGASNo ratings yet
- Modelling For Cruise Two-Dimensional Online Revenue Management SystemDocument7 pagesModelling For Cruise Two-Dimensional Online Revenue Management SystemBysani Vinod KumarNo ratings yet
- ICT Integration Challenges in Kenyan Math ClassroomsDocument7 pagesICT Integration Challenges in Kenyan Math ClassroomsSpica RegulusNo ratings yet
- Lesson 1: Introduction To FunctionsDocument25 pagesLesson 1: Introduction To FunctionsEfren LazaroNo ratings yet