You might also like
- CE 201 Lecture 1 - Chapters (1+ 2) (2.1)Document29 pagesCE 201 Lecture 1 - Chapters (1+ 2) (2.1)Aseily AhmedNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Engineering MechanicsDocument112 pagesEngineering Mechanicsch pavan kumarNo ratings yet
- Module 1 - Introduction To Mechanics PDFDocument10 pagesModule 1 - Introduction To Mechanics PDFsubyNo ratings yet
- Introduction to Engineering MechanicsDocument14 pagesIntroduction to Engineering MechanicsrushdiNo ratings yet
- Mechanics: Science That Describes and Predicts TheDocument14 pagesMechanics: Science That Describes and Predicts TheNoel RomeroNo ratings yet
- Barron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewFrom EverandBarron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewNo ratings yet
- Engineering Mechanics For Civil Engr.Document112 pagesEngineering Mechanics For Civil Engr.Clara Ogladit100% (1)
- Power, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksFrom EverandPower, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksNo ratings yet
- Final Unit-1A (EME-151,152)Document17 pagesFinal Unit-1A (EME-151,152)guptakrish330No ratings yet
- A Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsFrom EverandA Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsRating: 1 out of 5 stars1/5 (1)
- Dr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering MechanicsDocument28 pagesDr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering Mechanicsحسين راشد عيسى كريمNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Engineering Mechanics Lecture OverviewDocument28 pagesEngineering Mechanics Lecture OverviewENGR MUHAMMAD NOMANNo ratings yet
- Engineering Mechanics FundamentalsDocument7 pagesEngineering Mechanics FundamentalsFaisal KhanNo ratings yet
- Engineering Mechanics 1Document109 pagesEngineering Mechanics 1Adnan KhanNo ratings yet
- Engineering Mechanics NotesDocument100 pagesEngineering Mechanics NotesRagothsingh Ramadoss67% (3)
- Engineering Mechanics (Statics)Document32 pagesEngineering Mechanics (Statics)fahimNo ratings yet
- Me 212 Mechanics of Material - I: Credit Hours: Theory 3 Hrs Lab 1 HR Contact Hours: Theory 3 Hrs Lab 3 HrsDocument22 pagesMe 212 Mechanics of Material - I: Credit Hours: Theory 3 Hrs Lab 1 HR Contact Hours: Theory 3 Hrs Lab 3 HrsKifayat UllahNo ratings yet
- JJ205 Engineering Mechanics Course Outcomes and ConceptsDocument5 pagesJJ205 Engineering Mechanics Course Outcomes and ConceptsFaiZul IshAkNo ratings yet
- Overviews of StaticsDocument70 pagesOverviews of StaticsJacous WcyNo ratings yet
- Engineering MechanicsDocument100 pagesEngineering MechanicsShahzeb Karamat100% (2)
- Engineering Mechanics NotesDocument162 pagesEngineering Mechanics NotesvsanthanamNo ratings yet
- StressDocument21 pagesStressDeanne McfaddenNo ratings yet
- Mechanics of Materials Course OutlineDocument134 pagesMechanics of Materials Course Outlineirum,No ratings yet
- STATICSDocument4 pagesSTATICSAllen ChristianNo ratings yet
- Lecture Notes - Linear Elasticity TheoryDocument43 pagesLecture Notes - Linear Elasticity Theoryzcapg17No ratings yet
- Statics CH 01 MamadouKabirouTouréDocument89 pagesStatics CH 01 MamadouKabirouTourézeynab RassoulNo ratings yet
- Engineering Mechanics I Lecture Note 2 Page Per SheetDocument31 pagesEngineering Mechanics I Lecture Note 2 Page Per SheetMesgina G-herNo ratings yet
- Unit-1&2 Engineering MechanicsDocument15 pagesUnit-1&2 Engineering MechanicsVaidyanathan RamakrishnanNo ratings yet
- LEC#2Document40 pagesLEC#2MAHVISH SADAFNo ratings yet
- New Module 1 MechanicsDocument23 pagesNew Module 1 MechanicsGARAY, EUGENIONo ratings yet
- Engineering Mechanics: Statics Lecture 1 PDFDocument16 pagesEngineering Mechanics: Statics Lecture 1 PDFKhalid YousafNo ratings yet
- Basic Concepts of Engineering MechanicsDocument19 pagesBasic Concepts of Engineering MechanicsayingbaNo ratings yet
- Engineering Mechanics EssentialsDocument125 pagesEngineering Mechanics EssentialsSunish GuptaNo ratings yet
- Basic Mechanics-167 Unit1introDocument30 pagesBasic Mechanics-167 Unit1intronewtoneugene344No ratings yet
- Engineering MechanicsDocument169 pagesEngineering MechanicsRADHA KRISHNAN T93% (15)
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocument19 pagesEngineering Statics: Quaid-e-Azam College of Engineering & TechnologywaseemjuttNo ratings yet
- Chapter 1 Introduction SEDocument6 pagesChapter 1 Introduction SEniraj pandeyNo ratings yet
- ATec 2048 Student Version-1Document47 pagesATec 2048 Student Version-1andualem nigussieNo ratings yet
- Lecturer 1 - CIE 251Document14 pagesLecturer 1 - CIE 251Respicus RJNo ratings yet
- Statics and Dynamics in Petroleum EngineeringDocument9 pagesStatics and Dynamics in Petroleum Engineeringملاك محمدNo ratings yet
- Engg-Mechanics IntroductionDocument79 pagesEngg-Mechanics IntroductionDr. Pankaj KumarNo ratings yet
- Statics of Rigid Bodies Learning ModuleDocument7 pagesStatics of Rigid Bodies Learning ModuleJohn Alexis AncianoNo ratings yet
- Engineering Mechanics Lecture 1Document15 pagesEngineering Mechanics Lecture 1Khalid YousafNo ratings yet
- Introduction to Dynamics: Statics vs Dynamics, Newton's Laws of MotionDocument7 pagesIntroduction to Dynamics: Statics vs Dynamics, Newton's Laws of MotiondonatchangeNo ratings yet
- Shear Force Refers To The Force Acting Along On A Surface. Basically, The Force Forms NoDocument4 pagesShear Force Refers To The Force Acting Along On A Surface. Basically, The Force Forms Nodolar buhaNo ratings yet
- LECTURE Statics of Rigid BodiesDocument22 pagesLECTURE Statics of Rigid BodiesRey Ar OrionNo ratings yet
- Basic Concepts On StaticsDocument6 pagesBasic Concepts On Staticsmzairun100% (2)
- 1-Basic ConceptsDocument47 pages1-Basic Conceptsjaved hussainNo ratings yet
- Fundamental Concepts in MechanicsDocument48 pagesFundamental Concepts in MechanicsChristine MalibiranNo ratings yet
- Chapter 1 - Force Systems - Part ADocument14 pagesChapter 1 - Force Systems - Part ACheong JkNo ratings yet
- HuffmanDocument53 pagesHuffmandivyangkapadiaNo ratings yet
- Form 4 - Physics ExercisesDocument9 pagesForm 4 - Physics Exercisesnik mohamad solehin100% (3)
- Java FileDocument37 pagesJava FileJasmandeep brar100% (1)
- Activity No. 2 Combining Forces: Net N GDocument2 pagesActivity No. 2 Combining Forces: Net N GRachel B. Inting50% (2)
- Distinct Features of Leadership vs ManagementDocument8 pagesDistinct Features of Leadership vs Managementmukesh.33100% (2)
- Competency-Based Learning Materials for Programming (.Net Technology) NC IIIDocument44 pagesCompetency-Based Learning Materials for Programming (.Net Technology) NC IIIDenver CastilloNo ratings yet
- Aurelio BaldorDocument1 pageAurelio BaldorAnonymous vcdqCTtS9No ratings yet
- Factoring Perfect Square TrinomialsDocument2 pagesFactoring Perfect Square TrinomialsOrpelita RomeroNo ratings yet
- BT07 BMT17 Seismic Slope Displacement v5Document16 pagesBT07 BMT17 Seismic Slope Displacement v5Ravi SalimathNo ratings yet
- Euler Master Us All PDFDocument2 pagesEuler Master Us All PDFBenNo ratings yet
- Conservation of Energy LabDocument6 pagesConservation of Energy LabAneesh Malhotra0% (1)
- EvaporationDocument28 pagesEvaporationabishekmosesNo ratings yet
- AS Practice Paper F (Statistics & Mechanics) mark scheme breakdownDocument9 pagesAS Practice Paper F (Statistics & Mechanics) mark scheme breakdownKasundi FernandoNo ratings yet
- Analysis of The Influence of Price Perceptions, Product Quality and E-WOM On Purchasing Decisions at Shopee With Trust As MediationDocument10 pagesAnalysis of The Influence of Price Perceptions, Product Quality and E-WOM On Purchasing Decisions at Shopee With Trust As MediationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- EML 4142 Syllabus - SP 2014 PDFDocument1 pageEML 4142 Syllabus - SP 2014 PDFBrandy MathewsNo ratings yet
- Principles of Active Network Synthesis and Design - G. Daryanani (Bell Telephone Laboratories) (OCR)Document255 pagesPrinciples of Active Network Synthesis and Design - G. Daryanani (Bell Telephone Laboratories) (OCR)ilg1100% (1)
- Lesson4 Flat Plate Blasius Solution HandoutDocument15 pagesLesson4 Flat Plate Blasius Solution HandoutVijay NarayanNo ratings yet
- Chapter (1) Heet SDocument7 pagesChapter (1) Heet SsaadNo ratings yet
- Groovy Lang SpecificationDocument643 pagesGroovy Lang SpecificationguidgenNo ratings yet
- Stat 1x1 Final Exam Review Questions (Units 9, 10, 11)Document8 pagesStat 1x1 Final Exam Review Questions (Units 9, 10, 11)Ho Uyen Thu NguyenNo ratings yet
- The Design of Vibro Replacement (Priebe Teory)Document17 pagesThe Design of Vibro Replacement (Priebe Teory)paduco100% (3)
- Statistics Coursework PowerpointDocument8 pagesStatistics Coursework Powerpointafjwrcqmzuxzxg100% (1)
- Data Structures NotesDocument97 pagesData Structures NotesKibru AberaNo ratings yet
- DLL in Math V Q4 Week 3Document14 pagesDLL in Math V Q4 Week 3Uola HDNo ratings yet
- SIMILARITYDocument28 pagesSIMILARITYRyan Christian DioknoNo ratings yet
- Single Stub MatchingDocument13 pagesSingle Stub MatchingHaya AlqahtaniNo ratings yet
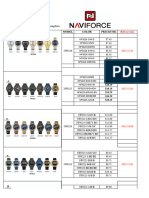
- NAVIFORCE Watch Catalogue in USD - Updated in 20240104Document47 pagesNAVIFORCE Watch Catalogue in USD - Updated in 20240104Perez PerezNo ratings yet
- 6.curve SurfaceDocument7 pages6.curve SurfaceShiela SorinoNo ratings yet
- Quezon Naguilian, IsabelaDocument2 pagesQuezon Naguilian, IsabelaYvette Marie Yaneza NicolasNo ratings yet