Professional Documents
Culture Documents
Fault Detection For Railway Traction Motor Bearing Through Leakage Current
Uploaded by
priyankaprashaanthOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Fault Detection For Railway Traction Motor Bearing Through Leakage Current
Uploaded by
priyankaprashaanthCopyright:
Available Formats
See discussions, stats, and author profiles for this publication at: https://www.researchgate.
net/publication/337408556
Fault Detection for Railway Traction Motor Bearing through Leakage Current
Article in Quarterly Report of RTRI · November 2019
DOI: 10.2219/rtriqr.60.4_256
CITATIONS READS
3 115
3 authors, including:
Minoru Kondo
Railway Technical Research Institute
47 PUBLICATIONS 369 CITATIONS
SEE PROFILE
All content following this page was uploaded by Minoru Kondo on 28 October 2020.
The user has requested enhancement of the downloaded file.
PAPER
Fault Detection for Railway Traction Motor Bearing through Leakage Current
Yo SAKAIDANI Minoru KONDO
Drive Systems Laboratory, Vehicle Control Technology Division
Ken TAKAHASHI
Lubricating Materials Laboratory, Materials Technology Division
Much research on detecting machinery faults in the early stage is being conducted for the
purpose of preventing failure and reducing maintenance effort simultaneously. In this paper,
a bearing fault detection method for a railway traction motor through leakage currents is pro-
posed. The proposed detection method combines octave band analysis and machine learning.
Experiments simulating abnormalities due to defective bearings were conducted and the ef-
fectiveness of the proposed method was verified. These experiments showed that the proposed
method can successfully detect failures in railway traction systems in relation to specific con-
ditions and that leakage current could potentially be used to detect bearing faults.
Keywords: fault detection, bearing fault, leakage current, octave band analysis, machine
learning, one-class classification, nearest neighbor
1. Introduction cal corrosion: bearing insulation and bearing conduction [8].
In Japan, electric corrosion of railway traction motor bear-
Failures in railway traction systems occasionally lead ings used to be a serious problem, but insulated bearings
to disastrous accidents and therefore periodic mainte- were developed to prevent it [9].
nance is performed to keep railway vehicles safe. In order Nowadays electrical corrosion is not a major issue
to enhance the safety of railway traction systems, much for railway traction motors in Japan because of insulated
research is being carried out into condition monitoring for bearings. However, insulated bearings may work as ca-
vehicle equipment. With respect to general motor failures, pacitors due to the insulation layer of the outer race. Due
almost half originate from bearings [1] and therefore early to the capacitance and the number of voltage pulses from
stage bearing fault detection is important. the inverter, a small leakage current may flow through
A lot of condition monitoring methods relying on physi- the bearing. This means that there is a possibility that a
cal properties such as vibration, acoustic emission, tem- bearing fault could be detected from leakage current vari-
perature and winding current have been proposed so far ance due to the bearing fault. In addition, research is be-
[2]-[6]. They often use signal processing techniques and ing conducted into bearing fault detection using common
some of them combine those techniques and machine learn- mode currents [10]. In this research, two bearing diagnosis
ing. Among them, vibration are widely used in condition methodologies were proposed. The first method counts
monitoring system because of its reliability as a bearing the number of discharge pulses that exceed a prefixed
fault defect indicator. When applying vibration monitor- threshold value. According to the research, the amplitude
ing to a railway traction system, a vibration sensor has to of CMC discharges decreases with faulty bearings so this
be attached to the railway traction motor directly, which means the number of large pulses decreases as the bearing
exposes it to severe conditions. Moreover, a long signal line deteriorates. Second method is to analyze the CMC in fre-
that extends from an underfloor traction motor is needed. quency domains. The frequency of the highest peak shifts
Therefore, it is preferable to refer to physical properties to the low frequency side with bearing degradation so they
other than vibrations for monitoring the condition of rail- can be detected by monitoring the CMC peak shifts. In this
way traction systems. This paper focuses on leakage cur- research, experiments were conducted and demonstrated
rents, which can be acquired directly from the inverter that that a fault in a bearing affected the CMC somehow.
provides power to the motor. No sensor has to be attached In parallel, a method for monitoring the condition of
to the motor. equipment on diesel railway cars is also being developed.
Leakage current is the current that occurs in an un- The method combines octave band analysis of vibrations
wanted current path under normal conditions [7]. One of and machine learning algorithms. Octave band analysis is
the causes for unwanted current is common mode voltage. a frequency analysis method, which is often used for acous-
Inverters generate a common mode voltage, which causes tic emissions and noise evaluations. In addition, a clas-
the common mode current (CMC) flowing from the mo- sification technique using machine learning was adopted.
tor windings to take an unintended path to the ground. In one-class classification, the detection of abnormalities
Current, which flows through the shaft and the bearings, is conducted only by using normal condition data. The ef-
causes a discharge between the bearing parts and causes fectiveness of the method was verified through bench tests
deterioration in the contact surface of the bearing. The and experiments using actual cars [11]-[15]. The method
damage from discharge to the bearing is known as electri- has a general applicability so it was applied to detect bear-
cal corrosion. There are two approaches to prevent electri- ing faults through leakage current.
256 QR of RTRI, Vol. 60, No. 4, Nov. 2019
Fig. 1 Schematic diagram of the fault detection method
Fig. 1 Schematic diagram of the fault detection method
applied to detect bearing faults through leakage current. In the case of fault detection, the diagnosis program learns
The following section introduces a bearing fault detec- components, the two must be plotted closely in this space.
The following section introduces a bearing fault detection what a normal condition is from the training data (normal data).
tion method combining octave band analysis and machine Therefore, normal data items are plotted closely together
method combining octave band analysis and machine learning After the training, test data is plotted in the multi-dimensional
learning [16]. Experiments were conducted by simulating as shown in Fig. 1 when normal condition signals are simi-
[16]. Experiments were conducted by simulating an inner race space and the distance between the test data (point X) and the
an inner race fault with a defective bearing. Section II de- lar and stable.
fault with a defective bearing. Section II describes the nearest training data (point A) is calculated. The test data is
scribes the diagnostic method. Section III describes the ex- In the case of fault detection, the diagnosis program
diagnostic method. Section III describes the experimental diagnosed as abnormal when the distance is longer than the
perimental procedure and results of the measurement and learns what a normal condition is from the training data
procedure and results of the measurement and diagnosis. reference distance. The reference distance is determined so that
diagnosis. Section IV discusses the results and the conclu- (normal data). After the training, test data is plotted in
Section IV discusses the results and the conclusion is given in 99% of the data are diagnosed as normal when the training data
sion is given in Section V. the multi-dimensional space and the distance between the
Section V. are diagnosed as the test data. The degree of abnormality is
test data (point X) and the nearest training data (point A)
defined below.
is calculated. The test data is diagnosed as abnormal when
2. Diagnosis method x NN x the reference distance. The ref-
2. Diagnosis method the distance f is
x longer
than 1 (1)
erence distance is determined d so that 99% of the data are
For the For the bearing
bearing fault fault detection
detection fromfrom a leakage
a leakage current, diagnosed
current, a whereas x normal
and NN when are thethe coordinates
training data of thearetest data and the
diagnosed
method
a method combining
combining octave
octave bandband analysis
analysis and and one-class
one-class as thenearest point The
test data. among the training
degree data respectively,
of abnormality is definedand dbe-
is the
classification
classification was was
used.used.
TheThe method
method was wasoriginally
originallydevel-
developed low. reference distance. The degree of abnormality becomes positive
as aavibration monitoring system for railway diesel cars. when the data
oped as vibration
Faults in
monitoring
railway
system
traction
for railway
equipment
diesel
often produce x −isNN
diagnosed
( x ) as abnormal.
cars. ( x ) above
fThe = 1
value is−affected by false-positive(1) data in the
abnormal
Faults noise and
in railway are equipment
traction thus detected oftenbyproduce
train crews
ab- or training data. Therefore, d the average of the distances between
normal passengers
noise and unfamiliar
are thuswith train installations.
detected by train crews This or
implies
pas- that where
the testx point
and NN and aare certain
the number
coordinatesof nearest
of the points
test should
data be
special knowledge about traction gear is
sengers unfamiliar with train installations. This implies not required to detect used
and the as the point
nearest value among
representing the degree
the training dataof respectively,
abnormality. The
a problem
that special if one is about
knowledge aware traction
of how ageartrain is
normally sounds. In
not required and ddetail
is the ofreference
the refineddistance.
degree of The abnormality
degree of is described
abnormalityin [15]-
order
to detect to diagnose
a problem railway
if one traction
is aware equipment
of how a trainproblems
normally in the [16].positive
becomes The programwhen the wasdata created using a scikit-learn
is diagnosed as abnormal. machine
sounds.sameIn way humans
order can, octave
to diagnose band traction
railway analysis, equipment
which is similar The learning
above library
value [18].
is affected by false-positive data in
to human hearing, is used to detect vibrations.
problems in the same way humans can, octave band analy- the training Thisdata.method needs neither
Therefore, abnormalof data
the average the nor parameter
distances
In order to conduct a diagnosis amid the complex vibrating
sis, which is similar to human hearing, is used to detect between adjustments
the testwith point respect
and ato certain
the equipment.
numberThe abnormality
of nearest
environment of a railway traction system, classification
vibrations. pointssimulation
should beexperiments
used as thewere value conducted with the
representing the degree
engine test
technique in machine learning was used. For classification, a bench and itThe was shown
In order to conduct a diagnosis amid the complex vi- of abnormality. detail thatof thethe refined
diagnosisdegree
program of detected
abnor- the
classifier is trained with a sufficient amount of data for each fault [13]. This diagnostic method
brating environment of a railway traction system, classifi- mality is described in [15]-[16]. Thehas general was
program applicability,
created and
predefined group, so that it can classify the data correctly. When
cation technique in machine learning was used. For clas- usingtherefore a scikit-learn the same
machine method was applied
learning library for
[18].fault detection
using machine learning, sufficient data for respective classes are through leakage currentneither
in railway traction motor
sification, a classifier is trained with a sufficient amount of This method needs abnormal data bearings.
nor pa-
needed for correct diagnosis. However, data relating to failures
data for each predefined group, so that it can classify the rameter adjustments with respect to the equipment. The
in railway traction systems is hard to obtain. Thus in this study,
data correctly. When using machine learning, sufficient abnormality
a fault detection system was developed using a one-class 3. Experiment simulation simulating
experiments abnormality
were conducted with
data for respective classes are needed for correct diagno- the engine test bench and it was shown that the diagnosis
classification method [17], which only uses normal data.
sis. However, data relating to failures in railway traction program detected theoffault
3.1 Conditions the [13].
experimentThis diagnostic method
For the detection of abnormalities in diesel railway cars,
systems is hard to obtain. Thus in this study, a fault detec- has general applicability, and therefore the same method
the one-class classification method was designed, which is
tion system was developed using a one-class classification was applied Thefor fault detection
experiment simulating through leakage current
an abnormality in
was conducted
based on the nearest neighbor principle. The method works as
method [17], which only uses normal data. railway
to traction
verify the motor
proposedbearings.
diagnosis method. Currents leakages in
follows:
For the detection of abnormalities in diesel railway the motor were measured on normal and abnormal bearings
Signals are measured and 1/12 octave band analysis is
cars, the one-class classification method was designed, under various conditions. Both bearings were insulated. The test
applied to those signals every second. Next, the dimensions of
which is based on the nearest neighbor principle. The 3. Experiment equipment issimulating
shown in Fig.abnormality
2. Two induction motors that had
the analyzed data are reduced by principle component analysis
method works as follows: been mounted in a train were used. One motor was used as a test
(PCA). The number of principle components is set to 6. Then,
Signals are measured and 1/12 octave band analysis is 3.1 Conditions motor and sensors of thewere experiment
attached to it. The other one was used
preprocessed data is plotted in a multi-dimensional space. If two
applied to those signals every second. Next, the dimensions as a load, which generated torque against the traction motor.
pieces of data have similar frequency components, the two must
of the analyzed data are reduced by principle component The experiment
Their output simulating an abnormality
shafts were connected was through
to each other con- a
be plotted closely in this space. Therefore, normal data items
analysis (PCA). The number of principle components is set ducted to verify
torque gauge theandproposed
the diagnosis
torque was method.
measured Currents
during the
are plotted closely together as shown in Fig. 1 when normal
to 6. Then, preprocessed data is plotted in a multi-dimen- leakages in the The
experiment. motor test were
motor measured
was cooled on normal
with a forcedand ab-
convection
condition signals are similar and stable.
sional space. If two pieces of data have similar frequency normal bearings under various conditions. Both bearings
QR of RTRI, Vol. 60, No. 4, Nov. 2019 257
Torque
Torquegauge
gauge Test
Torque Testmotor
motor
Load
Load Torquegauge
gauge Test
Testmotor
motor
Load
motor
Load Torque gauge Test motor
motor
Load
motor
motor
motor
Fig.
Fig.22 Experimental
Experimentalsetup
setup
Fig.
Fig.2 22Experimental
Fig. Experimental
Experimental setupsetup
setup
Fig. 2 Experimental setup
1.5
1.5 No-load
No-load
1.5
1.5 No-load
No-load
Load
1.5 Load
No-load
Load
Load
Load
Fig. Rotation
Rotation(rpm)(rpm)
Fig.3.3. Leakage
Leakagecurrent
currentsensor.
sensor. Rotation (rpm)
Fig.
Fig.3.3. Leakage
Leakagecurrent
currentsensor.
sensor. Fig. 66 Load torque Rotation
versus (rpm)
rotational speed.
Fig. 3Fig.Leakage
3. Leakage current sensor
current sensor. Fig. Fig. 6 Load torqueRotation
Fig.
Fig.6 6 Load
Load torque
Loadtorque
versus (rpm)
rotational speed. speed
versus rotational
torqueversus
versusrotational
rotationalspeed.
speed.
Fig. 6 Load torque versus rotational speed.
Table
Table II
Table
Test
1Table
TestI Icondition
condition
Test Table
condition
Load-side
Load-side Load
Test
Test
Load Table
conditionIRotational
condition Rotational Load
Load
Load-side Load Rotational Load
bearing
Load-side
bearing
Load-side Test
Loadcondition
condition
Load
condition speed[rpm]
Rotational
speed[rpm]
Rotational [Nm]
Load
[Nm]Load
bearing condition speed[rpm] [Nm]
Load-side
bearing
bearing Load
condition
condition Rotational
speed[rpm]
900
speed[rpm]
900 Load
[Nm]
[Nm]
bearingst condition 900
speed[rpm] [Nm]
1800
900
1800
900
Normal(1
Normal(1 ) ))
stst 1800
Normal(1 Full-load
Full-load 900
2700
1800
2700
1800 Shown
Shown
Full-load 2700 Shown
nd
Normal(2
Normal(1
Normal(2
Normal(1 ndst)st)
nd))
Normal(2 No-load
Full-load
No-load
Full-load 1800
3600
2700
3600
2700
inFig.
Shown
in Fig. 6
Abnormal
Normal(1
Normal(2
Abnormal
Normal(2 ndndst)
) ) No-load 3600
4500 inShown
Fig.66
Abnormalnd Full-load
No-load
No-load 2700
3600
4500
3600 in Shown
Fig.
in Fig.6 6
Normal(2
Abnormal )
Abnormal 4500
5400
No-load 3600
4500
5400
4500 in Fig. 6
Abnormal 5400
4500
5400
5400
justed to 20 m3/min. Thermocouples were installed in the
5400
bearing
bearingto
motor (showncheckinin
(shown Fig.
the Fig. 4)4)was
temperaturewasinstalled
installedandtoto thetheload-side.
prevent load-side.
overheating.After
After
Fig.
Fig.4.4. Normal
Normalbearing
bearing(insulated).
(insulated). bearing
the bearing
the (shown
installation, (shown
installation, inthe
theinFig.Fig.
traction4)4)was
traction was installed
motor
motor installed
was
was to tothe
driven
driven theaload-side.
load-side.
for
for 33 hours
hoursAfter
After
toto
Fig.
Fig.4.4. Normal
Normalbearing
bearing(insulated).
(insulated). Thebearingleakage (shownthe currentin Fig. was measured
4) was installed usingto the for current
load-side. sensor
After
thethe
stabilizeinstallation,
stabilize installation,
the
the grease
grease the
inintraction
traction
the bearing.
the bearing. motor
motor was
was driven
driven for 3 3 hours
hours toto
Fig.Fig.
4 4.Normal
Normalbearing (insulated)
bearing (insulated). (Pearson
the 301X)
installation, asthe shown
traction in motor
Fig. 3.was driven for 3 hours to
stabilize
stabilize
To the grease
the grease
To simulate in
a in the bearing.
the bearing.
bearing abnormality,
The
stabilize simulate greaseaaain
experimental
the bearing
theconditionsabnormality,
bearing. are ashown a bearing
bearing in with
with
Table an
an1.
artificial
artificialToTofault simulate
simulate
fault was
was made. bearing
made. bearing abnormality,
Simulating
Simulatingabnormality,
aalocal
local adefect,
abearing
bearing
defect, the
the with
withanan
surface
surface
First, an
Tofault experiment
simulate with
a bearing a normal
abnormality, bearing was
adefect,
bearing conducted.
with an
Flat artificial was made. Simulating a ait
local defect, the assurface
Flatplane
plane of artificial
the
Beforetheinner
ofartificial inner fault
race
starting race
fault
was
was
was the made.
machined
machined
made.
Simulating
experiments, totomake
Simulating make the
a
local
partially
itlocal
partially
load-side
defect,
flat
flat the
as
and
the
surface
shown
shown
anti-
surface
Flat
Flatplane
plane of
ininofthe
ofFig.
the 5.
Fig.
load-side
inner
inner
5. Then race
Then
bearings
was
racethe was
the machined
machined
bearing
bearing
of the was
to
wasto
test
make
tocleaned
cleaned
motor
it
make itwere partially
partially
and
and new new flat
flat
grease
removed.
as
grease shown
as shown
was
was
Then
Flat plane in in
packed
the
Fig.
Fig. inner
5. 5.
into Then racethe
Then
it.
was
Afterthe machined
bearing
bearing
completion was
was make
cleaned
cleaned
of the
it and
partially
and
experimentnewnew flat
grease as shown
grease
with waswas
the
packed
thein cleaned
Fig. into
5. Thenit. After
anti-load-side
the completion
bearing bearing
was of the experiment
was reinstalled
cleaned and new with
carefully
grease the
was
packed
packed
normal
normal into
intoit.new
bearing,
bearing, it.After
After
the
the completion
completion
load-side
load-side bearing ofofthe
bearing the
was
wasexperiment
experiment
replaced
replaced with
withthe
with
with the
the
the
andpacked a brand into it. the bearing
After (shown
completion in
of the Fig. 4) was
experiment installed
with theto
normal
normal
defective
defective bearing,
bearing,
bearing
bearing the
and
and load-side
load-side
the
the bearing
experiment bearing
experiment was
was was
was replaced
replaced
conducted
conducted with
with
after
afterthethe
aa
the load-side.
normal bearing, After the the installation,
load-side bearingwas the traction
wasconducted
replaced with motor was
defective
defective
running
running
driven in.bearing
in.
for
bearing
3 hours and
and and thetheexperiment
to stabilize
experiment
the grease
was conducted afterthe
after aa
defective
running
running in. in. bearing the experiment wasinconductedthe bearing. after a
For
To normal
Forsimulate
normal and
and abnormal
abnormal
a bearing bearings,
bearings,the
abnormality, theaexperiments
experiments
bearing with were
were an
runningFor in.
Fornormal normal and and abnormal
abnormal bearings,
bearings, thetheexperiments
experiments were
were
conducted
conducted
artificial atat
fault six
six different
wasdifferentmade. speeds
speeds with
Simulatingwith full-load
full-load
a local and
and no-load.
no-load.
defect, the
conducted
conducted For normal
at six
at six the and
different abnormal
different speeds bearings,
with
speedsgenerated the
full-load
with full-load experiments
andand no-load.were
no-load.
With
With
surface thetheof full-load,
full-load,
the inner load
therace loadwas motor
motor generated
machined totorque
torque
makeand against
against the
it partially the
Fig. conducted
With
With thethefull-load,at six
full-load, different
the
theload load speeds
motor
motor with full-load
generated
generated torque
torqueagainst no-load.
against the
the
Fig.5.5. Artificial
Artificialinner
innerrace
racefault.
fault. test
test
flat motor.
motor.
as shown The
The in torque
torque
Fig. 5.ofof the
Then the load
load
the motor
motor
bearing depended
depended
was cleaned onon the
the
and
Fig.
Fig.5.5. Artificial
Artificialinner
innerrace
racefault.
fault. With
test
testmotor. the
motor. full-load,
TheThe torquethe
torque load
ofof motor
the
theload loadgenerated
motor
motor torque
depended
depended against
ononthe the
the
cooling rotational
rotational speed
speed of
of the
the test
test motor
motor as
as shown
shown inin Fig.
Fig. 6.6. Without
Without aex-
a
cooling system with5 5.the air
air volume adjusted toto 20
20 mm/min.
33
Fig.
system Fig.
with Artificial
Artificial
the inner
volume race
inner race
adjustedfault
fault. /min. newtest
rotational grease
motor. speed was
Theofof packed
torque
the test into
of
motortheit.as Aftermotor
load completion depended of theon the
cooling
coolingsystemsystemwith withthe air
airvolume adjusted rotational
load, the load speedmotor the
did test
not motor
generate asshown
shown
torque inand
inFig.
Fig.
the 6.6. Without
testWithout
motor aa
motor to to20 mm/min.
3
Thermocouples
Thermocouples were
were the
installed
installed volume
inin thethe adjusted
motor toto 20
check
check
3
/min.
3 the
the load,
periment
rotationalthe load
with
speed motorthe
of the did
normal not
test generate
motorbearing, torque
as shown the and the
load-side
in Fig. test
6.test motor
bearing
Without a
cooling
Thermocouples system with
were the air
installed volume
in the adjusted
motor to
to 20
check m /min.
the load,
load,the
generated
generated theload load
small
small motor
motor
torque
torque did totonot
did not generate
maintain generate
maintain the torque
torque
rotational
thebearing
rotational and
and thethe
speed.
speed. test motor
InIn motor
each
each
Thermocouples
temperature
were insulated.
temperature and
and were
prevent
The
preventtestinstalled
overheating.
equipment
overheating. in the
The
is
The motor
leakage
shown
leakage in to check
current
Fig.
current 2.was
wasthe
Two wasload, replaced
the load with
motor the
did defective
not generate torque and
and thethe test experi-
motor
Thermocouples
temperature and were installed in The
the motor tocurrent
checkwas the generated
generated
case, the
the motorsmall
smallwas torque
torque to maintain
to maintain
accelerated the
from rotational
the arotational
a standstill, speed.
speed. In
continued each
In each
temperature
measured
induction
measured using
usingand
motors aprevent
a prevent
current
that had
current overheating.
overheating.
sensor been
sensor (Pearson Theleakage
mounted
(Pearson leakage
301X)
301X) in a asascurrent
shown
train
shown was
inin
were case,
ment
generated
case, was motor
conducted
small was was
torque accelerated
after a running
to maintain from in.
the rotationalstandstill, speed. continued
In each
temperature
measured anda aprevent overheating. The301X)
leakage current was case,the
rotating the
at motor
themotor
specified wasaccelerated
accelerated
rotational from
from
speed afor
for astandstill,
standstill,
180 seconds continued
continued
at least
used.
Fig.3.3.Oneusing
measured
Fig. using
motor current
wascurrent
used sensor
sensor
as a test(Pearson
(Pearson
motor 301X) asas
and sensors shown
shown wereinin rotating
case,
rotating Forthe at the
normal
motor
atstopped.
the
specified
and rotational
abnormal
was accelerated speed
bearings,
fromfor a 180 180 the seconds
standstill, at
experiments least
continued
measured
Fig.
Fig.3.3. using a current sensor (Pearson 301X) as shown in and rotating
and then
then at thespecified
stopped. specified
First,
First,
rotational
rotational
the
the “1st
“1st
speed
speed
Normal
Normal for
run”
run” 180 seconds
seconds
experiment
experiment
atatleast
wasleast
was
attachedThe experimental
to it. The conditions
other one are
was shown
used
The experimental conditions are shown in Table I. First, in
as Table
a load, I. First,
which were
androtating
thenconducted
atstopped.
the specified
stopped. at
First, six different
rotational
the “1st speeds
speed for
Normal run” with
180 full-load
seconds atwas
experiment and
least
Fig. The
3. experimental
The torque
experimental conditions
conditions are shown
arewas
shown in Table I.
in TableBefore First,
I. First, and
conducted
conducted then using
using athea brandFirst,
brand newthe
new “1st
bearing.
bearing. Normal
Then,
Then, run”
a “2nd
amotor experiment
“2nd Normal
Normal was
run”
run”
anan experiment
generated
experiment with
with aa normal
againstnormal thebearing
traction
bearing was conducted.
motor.
conducted. Before no-load.
and
conducted then With
stopped.
using a abrand full-load,
First, the
new “1st the
Normal load run” experimentgenerated was
an The experimental
anexperiment with conditions
a anormal bearing arewas
shown in Table Before
conducted. I. First, was conducted
was performed
performed usingusing
using brand
the
thesame newbearing.
same bearing.
bearing
bearing Then,
forThen,
for theasame
the a“2nd
“2nd Normal
Normalrun”
experiment. run”
experiment
starting
Their
starting
an
the
the
experiment
withshafts
experiments,
output
experiments, normal
with a normal
the
were
the bearing
load-side
load-side
bearing
wasand
connected conducted.
and
wasand
to each Before
anti-load-side
anti-load-side
conducted.
other
Before
torque
wasconducted
was
against
performed
performed using the
using a brand
using
test
thethe samemotor.
new
same bearing Thefor
bearing.
bearing
torque
Then,
for thethe asame
sameof the
“2nd
same
experiment.
load mo-
Normal
experiment.
experiment. run”
starting
starting
bearings
through the
ofathe
the experiments,
experiments,
test
torque motor
gauge were the
the
and load-side
load-side
removed.
the Then
torque and
the
wasanti-load-side
anti-load-side
cleaned
measuredanti- After
After
tor
this,
this,
depended
anan “abnormal
“abnormal
on thethe
run”
run”
rotational
was
was performed
performed
speed
with
with the
the defective
defective
bearings
starting of thethe test motor
experiments, were theremoved.
load-side Then andthe cleaned anti-
anti-load-side was
Afterperformed
After this,
this,anan“abnormal using
“abnormal same
run”
run” was bearing
was performed forof
performed
the
thewith same
with
test
thethe
motor as
experiment.
defective
defective
bearings
bearings
load-side
during of
the of the
the
bearing test
testmotor
was
experiment. motor were
were
reinstalled
The removed.
removed.
test carefully
motor Then
Thenand
was the
theacleaned
cleaned
brand
cooled anti-
new
withanti-a
bearing.
bearing.
shown in Fig. 6. Without awasload, the load motor did not
load-side
bearings bearing
ofbearing was
the testwas motorreinstalled
were removed. carefully
Then and a brand
the cleaned new
anti- After
bearing.
bearing. this, an “abnormal run” performed with the defective
load-side bearing reinstalled The leakage current was measured using the developed
load-side
forced convection was
cooling systemcarefully
reinstalled carefully
with the and aira avolume
and brand
brandnew new
ad- generate
bearing. The
The
leakage
torque andcurrent the was
test measured
motor using
generated the developed
small torque
load-side bearing was reinstalled carefully and a brand new Theleakage leakagecurrent currentwas wasmeasured
measuredusing usingthe thedeveloped
developed
The leakage current was measured using the developed
258 QR of RTRI, Vol. 60, No. 4, Nov. 2019
Table 2 Specifications of the condition monitor 3.3 Diagnosis results
Item Specification
Input signals Leakage current This section evaluates the performance of the diagnosis
Sampling 12.5 kHz based on leakage currents, using measured data. Training
Octave frequency and normal test data were created from“1st Normal”and
band Analysis 1 Hz “2nd Normal”experimental data. Data corresponding to
analysis frequency
Frequency range 10 Hz to 5 kHz the same load and speed conditions were mixed and then
Band width 1/12 octave separated randomly into training data and normal test
RMS values data. The diagnostic program studied“normal conditions”
Recorded data
Analysis results based on training data and diagnoses were conducted us-
Recording frequency 1 Hz ing normal and abnormal test data.
From the octave band analysis results, it was shown
to maintain the rotational speed. In each case, the motor that impact of a fault differed with frequency. As shown in
was accelerated from a standstill, continued rotating at the Fig. 7, the effect of a fault on a low frequency component
specified rotational speed for 180 seconds at least and then (less than 100 Hz) is lower than on a high frequency com-
stopped. First, the“1st Normal run”experiment was con- ponent. In this paper, only the high-frequency band (more
ducted using a brand new bearing. Then, a“2nd Normal than 1000 Hz) are used for the diagnosis.
run”was performed using the same bearing for the same The diagnosis results obtained using the high-frequen-
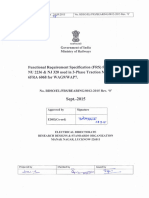
experiment. After this, an“abnormal run”was performed cy band (1000-5000 Hz) are shown in Fig. 8. Abnormalities
with the defective bearing. in the normal test data had negative values under all con-
The leakage current was measured using the devel- ditions and correct diagnoses were obtained for the normal
oped condition monitoring system. The sampling frequency bearing. In the case of abnormality detection with a full
for monitoring was 12.5 kHz and octave band analysis was load, the diagnosis program only detected a fault at 3600
applied to the measured signals every second. The specifi- rpm and the calculated abnormalities were small. In the
cations of the condition monitoring are shown in Table 2. case of no-load, the diagnosis program did not detect any
The recorded and processed data were saved automatically fault when the inverter was operated in PWM mode. How-
in an external USB device when the specified input value ever, when the inverter shifted to the rectangular wave
exceeded the preset threshold values. mode (more than 3600 rpm), all the abnormalities became
positive values and the diagnosis program successfully de-
3.2 Measurement results tected the fault in the bearing. Abnormalities increased in
accordance with the speed and it was confirmed that the
The condition monitor saves the root mean square bearing fault was detected clearly when there was no load
(RMS) values and octave band analysis data from the mea- during the rectangular wave mode.
sured values. This section presents the octave band analy-
sis data from each experiment.
The octave band analysis results of the leakage cur- 4. Discussion
rent are shown in Fig. 7. Each colored domain in the graph
represents the range in fluctuation of magnitude during A comparison of measurements and results of the diag-
the 180 seconds for each running condition. The blue and noses with previous work [10], led to the following findings:
orange lines represent no-load and the green and red lines Different fault types could affect the leakage cur-
represent the full-load condition. The blue and orange rent differently and the impact of each defect on the
bands are results of the normal bearing and the green and leakage current was unclear.
red bands are that of the abnormal bearing. The X and Y According to previous work, the capacitance of the bear-
axes show the frequency of the leakage current and the ing decreases as the bearings and their lubricant deteriorate.
root-mean-square value of the leakage current, respectively. As shown in Fig. 5, the fault type in this study was a single
Under a full-load, some peaks were found. The highest point defect and the high frequency components of the leak-
peak came from the inverter current frequencies, which age current increased when there was no load during the
corresponds to the product of rotational speed and the pole rectangular wave mode. This suggests the likelihood that ca-
pairs of the induction motor. The effect of the bearing fault pacitance increased due to the bearing fault. Although strict
on leakage current was small, and two band graphs over- comparisons are not possible because the experimental con-
lapped at almost all the frequencies. ditions were not identical, different bearing fault types could
With no-load and during the PWM mode (900 and 1800 have a different impact on the leakage current.
rpm), the two band graphs overlap and the effect of the The operating conditions of the motor such as
bearing fault was small. However, when the inverter shifted load and inverter operation mode, could also affect
to the rectangular wave mode, the magnitudes of frequency the leakage current.
components (especially more than 1000 Hz) changed obvi- The degree of abnormality calculated from the high fre-
ously. The bearing fault increased the high frequency com- quency components of the leakage current grew when the
ponents of the leakage current by more than 10 dB. motor was operated with no load during the rectangular
From the octave band analysis results, the effect of wave mode. Moreover, the high frequency components did
the bearing fault on the leakage current frequencies were not change with a full load or in PWM mode. The operating
shown especially for the no-load condition and during the conditions of the motor could influence the leakage current.
rectangular wave mode. In previous work [10], variations were found in the leakage
QR of RTRI, Vol. 60, No. 4, Nov. 2019 259
Increase
Increase
Fig. 7 Octave band analysis results (leakage current)
Fig. 7 Octave band analysis results (leakage current)
Fig. 7 Octave band analysis results (leakage current)
Fig. 8Fig.Diagnosis
8 Diagnosisresults
results byby leakage
leakage currents
currents
current but the operating conditions of the motor were not experiment. From the average values, it was deduced that
the effectiveness
described in detail.of the proposed method. Fig. 8 Diagnosis results by frequency
the bearing
leakage
components
fault decreased
currents
of the the
leakage current especially
impedance when
of the bearing
Using the newly developed condition monitoring system, and there was no load in the rectangular wave mode.
increased the leakage current values. The octave band
the average values and results of octave band analyses analysis Abnormalities were then
results revealed that diagnosed
the bearing through octave band
fault affected the
the effectiveness
conducted
5. Conclustion on of the
leakage proposed method.
currents, were recorded during the frequency components of the leakage current
high frequency components of the leakage currentUsing
analysis, followed by one-class especially
classification. when the
especial-
Using theFrom
experiment. newly thedeveloped condition
average values, monitoring
it was deducedsystem, there
that the ly was
diagnosis no load
program,in the
the rectangular
degree of wave mode.
abnormality
when there was no load in the rectangular wave mode. in normal and
the average
bearing
In thisfaultvalues
decreased
paper, and detection
a fault results
the ofmethod
impedanceoctave bandbearing
ofbased
the onanalysesand
leakage Abnormalities
abnormal test data were
Abnormalities was then diagnosed
werecalculated.
then Using
diagnosedthrough octave
thethrough
high band
frequency
octave
conducted
increased
current was
onproposed
the leakagecurrent
leakage currents, were
values.
and experiments Therecorded
octave during
band
simulating
the
analysis analysis, followed
bandsanalysis,
abnor- band of the leakage by one-class
current,
followed by the
classification.
diagnosis
one-class program wasUsing
classification.
the
capable
Using
experiment.
results From
revealed the
thataverage
the values,
bearing it was
fault deduced
affected that
the the
high diagnosis
of program,
detecting the the
bearing degree
fault of abnormality
correctly
malities were carried out using a bearing with an artificial the diagnosis program, the degree of abnormality in nor- when in
there normal
was no and
load,
bearing fault decreased the impedance of the bearing and
fault, to verify the effectiveness of the proposed method.
abnormal test data was calculated. Using the high frequency
mal and abnormal test data was calculated. Using the high
increased the leakage current values. The octave band analysis bands of the leakage current, the diagnosis program was capable
Using the newly developed condition monitoring sys- frequency bands of the leakage current, the diagnosis pro-
results revealed that the bearing fault affected the high of detecting the bearing fault correctly when there was no load,
tem, the RMS values and results of octave band analyses gram was capable of detecting the bearing fault correctly
conducted on leakage currents, were recorded during the when there was no load, during the rectangular wave
260 QR of RTRI, Vol. 60, No. 4, Nov. 2019
mode. These results verified that leakage current could po- pp.27-32, 1993 (in Japanese).
tentially serve as an index for abnormalities in the form of [10] Delgado, M., Garcia, A., Ortega, J. A., Urresty, J.,
bearing faults, under specific conditions. Leakage current and Riba, J. R.,“Bearing Diagnosis Methodologies by
may however be influenced by other components, which means of Common Mode Current,”presented at the
were not included in the present experiments. This means 13th European Conference on Power Electronics and
that the mechanisms underlying leakage current variance Applications, Barcelona, Spain, Sept. 8-10, 2009.
have to be clarified. [11] Kondo, M., Manabe, S., Takashige, T., and Kanno,
K.,“Traction Diesel Engine Anomaly Detection Us-
ing Vibration Analysis in Octave Bands,”QR of RTRI,
References Vol.57, No.2, pp.105-111, 2016.
[12] Kondo, M., Takashige, T., Manabe, S., and Kanno, K.,
[1] Bonnet, A. H., and Yung, C.,“Increased Efficiency “Abnormality Detection in a Contaminated Diesel En-
and Increased Reliability,”IEEE Industry Application gine by a Vibration Monitoring Method,”RTRI report,
Magazine, Vol. 14, pp.29-36, Jan. 2008. Vol.30, No.4, pp.47-52, 2016 (in Japanese).
[2] Marquez, F. P. G., Tobias, A. M., Perez, J. M. P., and [13] Nishitani, K., Kondo, M., Takashige, T., Kataoka, Y.,
Papaelias, M.,“Condition monitoring of wind turbines: and Noguchi, K.,“Application of the Condition Moni-
Techniques and methods,”Renewable Energy, Vol. 46, toring System by Vibration Analysis to Driving De-
pp.169-178, Oct. 2012. vices on Railway Vehicles in Operation,”RTRI report,
[3] Knight, A. M., and Bertani, S. P.,“Mechanical Fault Vol.32,No.8,pp.23-28,2018 (in Japanese).
Detection in a Medium-Sized Induction Motor Using [14] Nishitani, K., Kondo, M., Takashige, T., Kanno, K.,
Stator Current Monitoring,”IEEE Transactions En- “Application of the Condition Monitoring System by
ergy Conversion, Vol. 20, pp. 753-760, Dec. 2005. Vibration Analysis to Driving Devices on Railway Vehi-
[4] Mathew, J., and J. Alfredson, R.,“The Condition Moni- cles in Operation,”RTRI report, Vol.30,No.11,pp.35-
toring of Rolling Element Bearings Using Vibration 40,2016 (in Japanese).
Analysis,”Journal of Vibration, Acoustic, Stress, and [15] Kondo, M., Sakaidani, Y., and Takahashi, K.,“Ab-
Reliability in Design, Vol. 106, pp. 447-453, July. 1984. normal Bearing Detection for Traction Motors Using
[5] Stack, J. R., Habetler, T. G., and Harley, R. G.,“Fault Vibration Octave Band Spectra,”presented at the Dy-
Classification and Fault Signature Production for namics and Design Conference 2018, Tokyo, Japan,
Rolling Element Bearings in Electric Machine,”IEEE August 28-31, 2018, (in Japanese).
Transactions Industry Applications, Vol. 4, pp. 735- [16] Sakaidani, Y., Kondo, M.,“Bearing Fault Detection for
739, May 2004. Railway Traction Motors Through Leakage Current,”
[6] Blodt, M., Granjon, P., Raison, B., and Rostaing, G., presented at the International Conference of Electrical
“Models for Bearing Damage Detection in Induc- Machines, Greece, Oct. 3-6, 2018.
tion Motors Using Stator Current Monitoring,”IEEE [17] Tax, D.,“One-class classification,”Ph.D. thesis, Delft
Transactions on Industrial Electronics, Vol.55, no.4, University of Technology, 2001.
pp.1813-1822, 2008. [18] Pedregosa, F., Varoquaux, G., Gramfort, A., Michel,
[7] International Electrotechnical Commission,‘Voltages V., Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
and currents, leakage current,’IEC 60050 826-11-20. P., Weiss, R., Dubourg, V., Vanderplas, J., Passos, A.,
[8] Suzumura, J.,“Prevention of Electrical Pitting on Roll- Cournapeau, D., Brucher, M., Perrot, M. and Duch-
ing Bearings by Electrically Conductive Grease,”QR of esnay, E.,“Scikit-learn: Machine Learning in Python,”
RTRI, Vol.29,No.4,pp.29-34,2015. Journal of Machine Learning Research, Vol.12, pp.
[9] Watanabe, T.,“Electric Corrosion of Traction Motor 2825-2830, 2011.
Bearings and its Prevention,”RTRI report, Vol.7, No.4,
Authors
Ken TAKAHASHI
Yo SAKAIDANI, Dr. Eng.
Senior researcher, Lubricating Materials
Researcher, Drive Systems Laboratory,
Laboratory, Materials Technology Division
Vehicle Control Technology Division
Research Areas: Roller Bearing, Mechanical
Research Areas: Traction Motor
Engineering
Minoru KONDO, Dr. Eng.
Laboratory Head, Drive Systems Laboratory,
Vehicle Control Technology Division
Research Areas: Traction Motor, Condition
Monitoring
QR of RTRI, Vol. 60, No. 4, Nov. 2019 261
View publication stats
You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Yo Sakaidani Minoru KONDO Ken Takahashi: KeywordsDocument6 pagesYo Sakaidani Minoru KONDO Ken Takahashi: Keywordserode els erodeNo ratings yet
- Inspection and Monitoring Technologies of Transmission Lines with Remote SensingFrom EverandInspection and Monitoring Technologies of Transmission Lines with Remote SensingRating: 3 out of 5 stars3/5 (1)
- Fast Calculation Method of Abnormality Degree For Real Time Abnormality Detection in Vehicle EquipmentDocument7 pagesFast Calculation Method of Abnormality Degree For Real Time Abnormality Detection in Vehicle EquipmentpriyankaprashaanthNo ratings yet
- Development of Online Hybrid Testing: Theory and Applications to Structural EngineeringFrom EverandDevelopment of Online Hybrid Testing: Theory and Applications to Structural EngineeringRating: 5 out of 5 stars5/5 (1)
- A Review On Condition Monitoring and Diagnostic Techniques of Rotating Electrical MachinesDocument29 pagesA Review On Condition Monitoring and Diagnostic Techniques of Rotating Electrical Machinesarnika33No ratings yet
- Bearing DefectsDocument13 pagesBearing Defectsjoshibec100% (1)
- The Intelligent Fault Diagnosis Frameworks Based On Fuzzy IntegralDocument6 pagesThe Intelligent Fault Diagnosis Frameworks Based On Fuzzy IntegralelmerkhNo ratings yet
- Journal - Jpe - 16-3 - 854351307 2Document13 pagesJournal - Jpe - 16-3 - 854351307 2Behrouz MinayiNo ratings yet
- Investigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographDocument11 pagesInvestigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographJabezNo ratings yet
- Ijecv8n1 03Document6 pagesIjecv8n1 03fakhriNo ratings yet
- Micro GraphDocument9 pagesMicro GraphSudhir PatelNo ratings yet
- Applied Sciences: A Computer Vision Based Conveyor Deviation Detection SystemDocument10 pagesApplied Sciences: A Computer Vision Based Conveyor Deviation Detection SystemWalid HalloucheNo ratings yet
- Data Acquisition and Computer Simulation IntegrateDocument12 pagesData Acquisition and Computer Simulation Integrateyc3879No ratings yet
- Energies: Failure Detection by Signal Similarity Measurement of Brushless DC MotorsDocument23 pagesEnergies: Failure Detection by Signal Similarity Measurement of Brushless DC MotorsJose Daniel Sacoto PeraltaNo ratings yet
- Diagnosis of Distributed Faults in Outer Race of Bearings Via Park's Transformation MethodDocument6 pagesDiagnosis of Distributed Faults in Outer Race of Bearings Via Park's Transformation MethodirfanNo ratings yet
- A Hybrid Gwo-Rbfnn Model For Inter-Turn Insulation Fault Detection and Diagnosis in Induction MotorDocument15 pagesA Hybrid Gwo-Rbfnn Model For Inter-Turn Insulation Fault Detection and Diagnosis in Induction MotorRa muNo ratings yet
- Applsci 07 01027 v2 PDFDocument15 pagesApplsci 07 01027 v2 PDFHusain KanchwalaNo ratings yet
- Safe18 0062 FiDocument9 pagesSafe18 0062 FiKawthar AlamehNo ratings yet
- Presentation Review of ML in Sound Anoomally DetectionDocument15 pagesPresentation Review of ML in Sound Anoomally DetectionAdebisi RichardNo ratings yet
- Design of Rail Track Flaw Detection System Using MatlabDocument28 pagesDesign of Rail Track Flaw Detection System Using MatlabeshuNo ratings yet
- Vibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDocument10 pagesVibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDrRajeev ChauhanNo ratings yet
- Dot 8995 DS1Document31 pagesDot 8995 DS1Bruno PerlesNo ratings yet
- 02chapter1 PDFDocument9 pages02chapter1 PDFmghgolNo ratings yet
- Analysis of Permanent Magnet Synchronous MotorDocument15 pagesAnalysis of Permanent Magnet Synchronous Motormalini72No ratings yet
- Sensors: Comparison of Filtering Methods For Enhanced Reliability of A Train Axle Counter SystemDocument18 pagesSensors: Comparison of Filtering Methods For Enhanced Reliability of A Train Axle Counter SystemDeni Agustina JNo ratings yet
- Detection and Evaluation of Rail Defects With Nondestructive Testing MethodsDocument9 pagesDetection and Evaluation of Rail Defects With Nondestructive Testing MethodsPunkajGuptaNo ratings yet
- ML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDocument19 pagesML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDEE MEMUNo ratings yet
- A Review of Condition Monitoring of Induction Motors Based On Stray FluxDocument7 pagesA Review of Condition Monitoring of Induction Motors Based On Stray FluxRenergy NusantaraNo ratings yet
- Sensors: Naive Bayes Bearing Fault Diagnosis Based On Enhanced Independence of DataDocument17 pagesSensors: Naive Bayes Bearing Fault Diagnosis Based On Enhanced Independence of DataSérgio CustódioNo ratings yet
- Comparison of Sensors and Methodologies For Effective Prognostics On Railway Turnout SystemsDocument19 pagesComparison of Sensors and Methodologies For Effective Prognostics On Railway Turnout SystemsPalade MihaelaNo ratings yet
- Uic-Jrp2 - Correlations Between Rail Defect GrowthDocument80 pagesUic-Jrp2 - Correlations Between Rail Defect GrowthBruno PerlesNo ratings yet
- Entropy: A New Feature Extraction Method Based On EEMD and Multi-Scale Fuzzy Entropy For Motor BearingDocument21 pagesEntropy: A New Feature Extraction Method Based On EEMD and Multi-Scale Fuzzy Entropy For Motor BearingAtoui IssamNo ratings yet
- Shifat 2020Document14 pagesShifat 2020Cristian ChiletNo ratings yet
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocument6 pagesEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoNo ratings yet
- Fault Diagnosis in Electric Drives Using Machine Learning ApproachesDocument21 pagesFault Diagnosis in Electric Drives Using Machine Learning ApproachesRaid AbdemezianeNo ratings yet
- ANNAssisted Multi Sensor Information Fusionfor BLDCMotor Fault DiagnosisDocument14 pagesANNAssisted Multi Sensor Information Fusionfor BLDCMotor Fault DiagnosisBalan SelvanNo ratings yet
- Arizmendi 2015 J. Phys. Conf. Ser. 628 012082Document10 pagesArizmendi 2015 J. Phys. Conf. Ser. 628 012082Tito V. CruzNo ratings yet
- Recent Developments Induction Motor Drives Fault Diagnosis Using AI TechniquesDocument8 pagesRecent Developments Induction Motor Drives Fault Diagnosis Using AI Techniquesfahim47No ratings yet
- Emcw 2001 Artesis PaperDocument5 pagesEmcw 2001 Artesis Paperವಿಶ್ವನಾಥ ಸಿNo ratings yet
- Intelligent Bearing Tester Using Labview: D. Ganeshkumar and K. KrishnaswamyDocument5 pagesIntelligent Bearing Tester Using Labview: D. Ganeshkumar and K. KrishnaswamyMuthukumarNo ratings yet
- Asmc 2019 8791756Document6 pagesAsmc 2019 8791756Vũ Trần Thành CôngNo ratings yet
- Machine Condition Monitoring Project Final ReportDocument11 pagesMachine Condition Monitoring Project Final ReportSivasidharth EzhilNo ratings yet
- Seminar III Report FinalDocument39 pagesSeminar III Report Finalganesh gundNo ratings yet
- 1742-Article Text-13016-1-10-20240318Document9 pages1742-Article Text-13016-1-10-20240318Indir JaganjacNo ratings yet
- Classification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionDocument9 pagesClassification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionHanifNo ratings yet
- Qualification Process For Phased Array UT Using DNV RP-F118Document12 pagesQualification Process For Phased Array UT Using DNV RP-F118aztec20100% (1)
- An Artificial Immune System Approach For The Fault Detection and Diagnosis of A DC MachineDocument6 pagesAn Artificial Immune System Approach For The Fault Detection and Diagnosis of A DC MachineInahp RamukNo ratings yet
- An Evaluation of Engine Faults Diagnostics Using Artificial Neural NetworksDocument8 pagesAn Evaluation of Engine Faults Diagnostics Using Artificial Neural NetworkssenthilNo ratings yet
- Ieee Icphm2023 V6Document7 pagesIeee Icphm2023 V6ParvathyNo ratings yet
- How To Evaluate BoatsDocument14 pagesHow To Evaluate BoatsJuniorJavier Olivo FarreraNo ratings yet
- Diagnosing Failed Distribution Transformers Using Neural NetworksDocument6 pagesDiagnosing Failed Distribution Transformers Using Neural NetworksLuchito BedoyaNo ratings yet
- The Important Role of Eddy Current Testing in Railway Track MaintenanceDocument4 pagesThe Important Role of Eddy Current Testing in Railway Track MaintenanceEnrico BetterleNo ratings yet
- يسDocument13 pagesيسamine zdNo ratings yet
- Semeq PDFDocument19 pagesSemeq PDFluccadecarvalhoNo ratings yet
- TS4 6 ArtificialNeuralNetworkBasedFaultDocument6 pagesTS4 6 ArtificialNeuralNetworkBasedFaultSubhankar BoseNo ratings yet
- Applmech 04 00020Document15 pagesApplmech 04 00020jose manuel gomez jimenezNo ratings yet
- Wang Voltage EntropyDocument14 pagesWang Voltage EntropyYumin WangNo ratings yet
- Online Fault Diagnosis of MotorDocument6 pagesOnline Fault Diagnosis of MotorSundar Kumar Vasantha GovindarajuluNo ratings yet
- Transmission Line Signature AnalysisDocument6 pagesTransmission Line Signature AnalysisLalit KumarNo ratings yet
- MS 415 Amen - No - 1Document5 pagesMS 415 Amen - No - 1priyankaprashaanthNo ratings yet
- 1639028249261-Imported ItemsDocument2 pages1639028249261-Imported ItemspriyankaprashaanthNo ratings yet
- NU 2236 ECML - Cylindrical Roller Bearings - SKFDocument8 pagesNU 2236 ECML - Cylindrical Roller Bearings - SKFpriyankaprashaanthNo ratings yet
- The Effect of End Windings and The Bearing Labyrinth Seals OnDocument11 pagesThe Effect of End Windings and The Bearing Labyrinth Seals OnpriyankaprashaanthNo ratings yet
- FRS 12-2015Document3 pagesFRS 12-2015priyankaprashaanthNo ratings yet
- Song 2019Document5 pagesSong 2019priyankaprashaanthNo ratings yet
- 2011 Anderson-San Andres Comparison of Leakage Between A Labyrinth Seal and An All Metal Compliant Gas Seal at High TemperatureDocument34 pages2011 Anderson-San Andres Comparison of Leakage Between A Labyrinth Seal and An All Metal Compliant Gas Seal at High TemperaturepriyankaprashaanthNo ratings yet
- Chapter 6Document39 pagesChapter 6kirubel AlemuNo ratings yet
- Parallel Sensing of Metallic Wear Debris in Lubricants U - 2012 - Tribology Inte PDFDocument7 pagesParallel Sensing of Metallic Wear Debris in Lubricants U - 2012 - Tribology Inte PDFKaty PerezNo ratings yet
- Risk Based Inspection Methodology and Software Applied To Atmospheric Storage TanksDocument14 pagesRisk Based Inspection Methodology and Software Applied To Atmospheric Storage TanksDavid RodriguesNo ratings yet
- Measurement and Automation Systems: The Iba SystemDocument11 pagesMeasurement and Automation Systems: The Iba Systemryan940No ratings yet
- Dynamic Programming Approach To Optimal Maintenance Scheduling of Substation Equipment Considering Life Cycle Cost and ReliabilityDocument4 pagesDynamic Programming Approach To Optimal Maintenance Scheduling of Substation Equipment Considering Life Cycle Cost and ReliabilityEsthevan CevallosNo ratings yet
- DB Soft Manual 1Document25 pagesDB Soft Manual 1Nguyễn Việt ĐjểnNo ratings yet
- BHCS34337A Sugar Refinery Brochure R6Document8 pagesBHCS34337A Sugar Refinery Brochure R6hudaNo ratings yet
- Vibration Condition Monitoring Sample Report 1Document8 pagesVibration Condition Monitoring Sample Report 1Mohamed Bin Ierous100% (2)
- Saravanan.T.D: Personal Details Profile SummaryDocument4 pagesSaravanan.T.D: Personal Details Profile Summarypalla mounicaNo ratings yet
- en Bearing Damage and Failure AnalysisDocument106 pagesen Bearing Damage and Failure Analysisacicuencano100% (5)
- Powermind Insights CEA 01122023Document5 pagesPowermind Insights CEA 01122023Vanaja DNo ratings yet
- Equipment Maintenance Management in Cape Verde Porto Da Praia - PDFDocument72 pagesEquipment Maintenance Management in Cape Verde Porto Da Praia - PDFAmel Abbas Abbas AbbakerNo ratings yet
- Detailed ThursdayDocument29 pagesDetailed Thursdaymscott6086No ratings yet
- 03000en PDFDocument188 pages03000en PDFMd.Bazlur RahmanNo ratings yet
- Machine Conditionvibration MonitoringDocument32 pagesMachine Conditionvibration Monitoringmohamed abourayaNo ratings yet
- Draft Inspection Plan ATEX AreasDocument20 pagesDraft Inspection Plan ATEX Areasbebe moeNo ratings yet
- CH HGRS MaintenanceDocument45 pagesCH HGRS MaintenanceYuri Botero100% (2)
- Rem 54Document70 pagesRem 54Dileep R BangerNo ratings yet
- Me2037 Maintenance Engineering L T P CDocument1 pageMe2037 Maintenance Engineering L T P CamanpurushothNo ratings yet
- MER1MM - 09v0 - Advanced Preventive MaintenanceDocument98 pagesMER1MM - 09v0 - Advanced Preventive Maintenanceahmed mahmoud100% (1)
- Kuemmlee 2013Document13 pagesKuemmlee 2013Sebastian CholulaNo ratings yet
- Application Note: Vibration Monitoring of Air-Cooled Heat Exchangers - Safety and Predictive MonitoringDocument2 pagesApplication Note: Vibration Monitoring of Air-Cooled Heat Exchangers - Safety and Predictive MonitoringMauricioalvNo ratings yet
- Kiran Josyula Updted ResumeDocument3 pagesKiran Josyula Updted ResumeghanicwiNo ratings yet
- Machine Condition TesterDocument8 pagesMachine Condition TesterLuis MarquezNo ratings yet
- Eaton - Internormen Wind Power SolutionsDocument12 pagesEaton - Internormen Wind Power SolutionsEaton FiltrationNo ratings yet
- Main 1Document6 pagesMain 1hamidrezaNo ratings yet
- Maintenance Engineering Questions and AnswersDocument46 pagesMaintenance Engineering Questions and Answersakbar_mdhNo ratings yet
- Top Drive: "Helping Our Customers Achieve Superior Results"Document6 pagesTop Drive: "Helping Our Customers Achieve Superior Results"Mr. Hein Htet Soe100% (1)
- 19ME71C - Queston Bank - CO1 To CO5Document5 pages19ME71C - Queston Bank - CO1 To CO5007 Karim khan mechNo ratings yet
- Acm PDFDocument208 pagesAcm PDFBrian Careel100% (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)