You might also like
- On the Shop Floor: Two Studies of Workshop Organization and OutputFrom EverandOn the Shop Floor: Two Studies of Workshop Organization and OutputNo ratings yet
- ⼀ 巡 anlctct: cilflj 压Document7 pages⼀ 巡 anlctct: cilflj 压Shigh MatNo ratings yet
- Cartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandCartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Electrochemistry 1Document14 pagesElectrochemistry 1ssidharth6761No ratings yet
- Tutorial08 SolutionDocument7 pagesTutorial08 SolutionIdhichote BenNo ratings yet
- Solution Manual ContentsDocument1 pageSolution Manual ContentsJammy LaiNo ratings yet
- Lec14-Cross Product, Torque, and Angular MomentumDocument13 pagesLec14-Cross Product, Torque, and Angular MomentumpvriiscNo ratings yet
- Yitude: Review I'dDocument9 pagesYitude: Review I'dwallhumedxxNo ratings yet
- Karim Kobeissi Final Formula SheetDocument2 pagesKarim Kobeissi Final Formula SheetPia SaadéNo ratings yet
- Probability amplitudes and spin states in quantum mechanicsDocument9 pagesProbability amplitudes and spin states in quantum mechanicsShigh MatNo ratings yet
- ECE110H1 - 20221 - 631656482289formula Sheet For FinalDocument2 pagesECE110H1 - 20221 - 631656482289formula Sheet For FinalIsabella TangNo ratings yet
- FME Unit 3 Part 2Document29 pagesFME Unit 3 Part 2Jayanth TurimellaNo ratings yet
- Proposal UI SMV 2024Document19 pagesProposal UI SMV 2024mnabb128No ratings yet
- Jayanta Kumar TandiDocument2 pagesJayanta Kumar TandiJayanta TandiNo ratings yet
- Eijkl2Jvx2Uujeijk2G: N7J2UvtgjuDocument6 pagesEijkl2Jvx2Uujeijk2G: N7J2Uvtgjufunk singhNo ratings yet
- Eaeri: of FindDocument5 pagesEaeri: of FindVaishali RajputNo ratings yet
- VCM BrochureDocument6 pagesVCM Brochurediyanorm2020No ratings yet
- Thermodynamics1 QueDocument113 pagesThermodynamics1 QueAnuj TejasNo ratings yet
- Direct and Indirect Speech RulesDocument9 pagesDirect and Indirect Speech Rulesmonika khanNo ratings yet
- Apm hw3Document6 pagesApm hw3coffee CoffeeNo ratings yet
- Curvilinear & Projectile Motion - Rectangular ComponentsDocument8 pagesCurvilinear & Projectile Motion - Rectangular ComponentspanpanNo ratings yet
- Lec 03 - Linear AlgebraDocument11 pagesLec 03 - Linear AlgebraFluke TeethavatNo ratings yet
- JDDF Zo Jug: JX JDD Go T Inertia Damping DDDF DdatedDocument18 pagesJDDF Zo Jug: JX JDD Go T Inertia Damping DDDF DdatedMuhammad Kamran MustafaNo ratings yet
- CIRCULAR MOTIONDocument23 pagesCIRCULAR MOTIONAnkit PatidarNo ratings yet
- Lecture 3 Grey Systems-4Document21 pagesLecture 3 Grey Systems-4victorigamiNo ratings yet
- Crush It Other 8 NoticeDocument1 pageCrush It Other 8 NoticeKrispyKreme08No ratings yet
- 17 - 18 - DC Motor and Amplifiers - SVDocument8 pages17 - 18 - DC Motor and Amplifiers - SVFazalur RehmanNo ratings yet
- Map PresentationDocument11 pagesMap Presentationapi-532850293No ratings yet
- Rotational Forces, Torque, and Motion AnalysisDocument223 pagesRotational Forces, Torque, and Motion AnalysisFazalur RehmanNo ratings yet
- Studentdetai L S: Bpmandalcollegeofengi Neeri NGDocument7 pagesStudentdetai L S: Bpmandalcollegeofengi Neeri NGGuddu RaiNo ratings yet
- 备注 2021年6月18日Document5 pages备注 2021年6月18日geosltdNo ratings yet
- Note Apr 13, 2021Document19 pagesNote Apr 13, 2021goucloudNo ratings yet
- HW7, LA Ready To PrintDocument2 pagesHW7, LA Ready To PrintjtempNo ratings yet
- Dwnload Full Engineering Mechanics Dynamics 13th Edition Hibbeler Solutions Manual PDFDocument35 pagesDwnload Full Engineering Mechanics Dynamics 13th Edition Hibbeler Solutions Manual PDFstrungrowett0m9ze100% (8)
- Assignment 4Document7 pagesAssignment 4Luis David Cajavilca CutimancoNo ratings yet
- Acco 420 Final Coursepack CoursepacAplusDocument51 pagesAcco 420 Final Coursepack CoursepacAplusJax TellerNo ratings yet
- Fluid Mechanics III Assignment 3 PDFDocument3 pagesFluid Mechanics III Assignment 3 PDFJack WalshNo ratings yet
- Stories Core ModelingDocument5 pagesStories Core ModelingAS POSTNo ratings yet
- Reservati Onconfi Rmati On: Date: October17,2018Document2 pagesReservati Onconfi Rmati On: Date: October17,2018Brian Pol ExiomoNo ratings yet
- Ichignation: EeguahossnfcxrgelDocument11 pagesIchignation: EeguahossnfcxrgelRAJU CNo ratings yet
- Note Feb 14, 2024Document2 pagesNote Feb 14, 2024gisellefpachecoNo ratings yet
- Power transmission gearsDocument20 pagesPower transmission gearsLokesh Kumar GuptaNo ratings yet
- Note Feb 10, 2023Document11 pagesNote Feb 10, 2023mo9mrnNo ratings yet
- Lecture 03-Before ClassDocument9 pagesLecture 03-Before ClassLincolnNo ratings yet
- MAT-313 Linear Algebra Unit 5: Polar and Singular Value DecompositionsDocument38 pagesMAT-313 Linear Algebra Unit 5: Polar and Singular Value DecompositionsNirmal RawatNo ratings yet
- 2015 Junior EnglishDocument7 pages2015 Junior EnglishWai MarNo ratings yet
- Chapter 3 Vector-Valued FunctionsDocument3 pagesChapter 3 Vector-Valued Functionszhen yang ganNo ratings yet
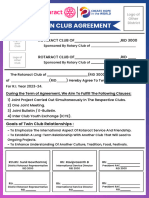
- RID 3000 Twin Club AgreementDocument1 pageRID 3000 Twin Club AgreementT. JeganNo ratings yet
- 1 - Note 16. Mar 2023Document5 pages1 - Note 16. Mar 2023AbhishekNo ratings yet
- Babymonkey: Abbr Evi at I Ons. .Document7 pagesBabymonkey: Abbr Evi at I Ons. .Javier MelendezNo ratings yet
- Dynamics of Rigid BodiesDocument12 pagesDynamics of Rigid BodiesAlinaah GunnerNo ratings yet
- JR1 5.gyak 2021 TavaszDocument10 pagesJR1 5.gyak 2021 TavaszKenderes AnettNo ratings yet
- Note Nov 11, 2019Document12 pagesNote Nov 11, 2019auctmetuNo ratings yet
- Substitution and Elimination Reaction Sheet 10 JuneDocument28 pagesSubstitution and Elimination Reaction Sheet 10 Juneaditya kumarNo ratings yet
- Road Construction ReportDocument16 pagesRoad Construction ReportVishwas SmartyNo ratings yet
- Speed Control of DC MotorsDocument6 pagesSpeed Control of DC Motorsfuh kingsleyNo ratings yet
- 22 JulyDocument16 pages22 JulySubhash YadavNo ratings yet
- Note Sep 13, 2022Document5 pagesNote Sep 13, 2022P D (pandasiteitei)No ratings yet
- Medium Transmission Line FDocument9 pagesMedium Transmission Line FJomeNo ratings yet
- Algebraic: Way of For of ofDocument5 pagesAlgebraic: Way of For of ofmuskan agarwalNo ratings yet
- DSCP AssignmentDocument2 pagesDSCP AssignmentBrc TomsNo ratings yet
- Las Math G9 W2 Q4Document3 pagesLas Math G9 W2 Q4Jomar JamonNo ratings yet
- Complex Numbers MCQsDocument7 pagesComplex Numbers MCQsnp2703199071% (7)
- 3polyn PDFDocument3 pages3polyn PDFRaviteja KalaNo ratings yet
- AGM - Worked SolutionsDocument418 pagesAGM - Worked SolutionsKirai MariaNo ratings yet
- 1 Scalars and Vectors: 1.1 What Is A Vector?Document9 pages1 Scalars and Vectors: 1.1 What Is A Vector?Rishi ScifreakNo ratings yet
- On The Lambert W Function - Applied Mathematics - University ofDocument32 pagesOn The Lambert W Function - Applied Mathematics - University ofpablo medinaNo ratings yet
- Tejas: Practice Sheet JEE MathematicsDocument4 pagesTejas: Practice Sheet JEE MathematicsMeet ShahNo ratings yet
- Khan Academy 5th To 6th Grade Math Summer Practice 2Document6 pagesKhan Academy 5th To 6th Grade Math Summer Practice 2addo_No ratings yet
- 12th Class Mathematics Part 1 WWW Prep4Civils ComDocument289 pages12th Class Mathematics Part 1 WWW Prep4Civils ComPrep4CivilsNo ratings yet
- CH 6 PDFDocument19 pagesCH 6 PDFMridula PriyaNo ratings yet
- Ahsme 1955 PDFDocument7 pagesAhsme 1955 PDFQFDqNo ratings yet
- Basic Calculus Module Unit 1 PDFDocument52 pagesBasic Calculus Module Unit 1 PDFhelloNo ratings yet
- Inverse FunctionsDocument6 pagesInverse FunctionsLilac LucyNo ratings yet
- ME451 Final Fa00Document6 pagesME451 Final Fa00ilhamNo ratings yet
- Moment Generating FunctionsDocument9 pagesMoment Generating FunctionsAnasrul -No ratings yet
- Math Practice Sheet SolutionsDocument2 pagesMath Practice Sheet SolutionsKailashJindalNo ratings yet
- Keystone Algebra 1 Simplifying Exponential Expressions WS2Document4 pagesKeystone Algebra 1 Simplifying Exponential Expressions WS2Jesus PeraltaNo ratings yet
- Mathematics B: Pearson Edexcel International GCSEDocument28 pagesMathematics B: Pearson Edexcel International GCSEMir Sameen HasnatNo ratings yet
- MTH6140 Linear Algebra II: Notes 5 18th November 2010Document11 pagesMTH6140 Linear Algebra II: Notes 5 18th November 2010Roy VeseyNo ratings yet
- 2aa Daily PracticeDocument1 page2aa Daily Practiceapi-300252239No ratings yet
- Chap 5 - Routh Hurwitz Stability Criterion: UEEA 3423 Control SystemsDocument35 pagesChap 5 - Routh Hurwitz Stability Criterion: UEEA 3423 Control SystemsYap Win IanNo ratings yet
- Grade 7 Mathematics - Consolidated Curriculum - 2021Document10 pagesGrade 7 Mathematics - Consolidated Curriculum - 2021Ronichia A SchwiersNo ratings yet
- 3 - Trigonometric FunctionsDocument26 pages3 - Trigonometric FunctionsZamanoden D. UndaNo ratings yet
- 10th Samacheer Kalvi Maths EM Public Exam QP Sample 4 PDFDocument4 pages10th Samacheer Kalvi Maths EM Public Exam QP Sample 4 PDFPalaniswamy SankariahNo ratings yet
- Fourier LaplaceDocument6 pagesFourier LaplaceArnab BhowmikNo ratings yet
- FibonacciDocument12 pagesFibonacciluhusapa-1No ratings yet
- Math3974 2004 ExamDocument5 pagesMath3974 2004 ExamMarcus LiNo ratings yet
- Grades 1 TO 12 Daily Lesson LOG School Grade Level Teacher Learning Area Teaching Dates QuarterDocument2 pagesGrades 1 TO 12 Daily Lesson LOG School Grade Level Teacher Learning Area Teaching Dates QuarterCiara Mae PrincesNo ratings yet
- Targate-Maths Booklet (Non Dowloadable)Document102 pagesTargate-Maths Booklet (Non Dowloadable)Sonal Kumar AgrawalNo ratings yet