You might also like
- Galois Theory 4th Stewart Solution ManualDocument9 pagesGalois Theory 4th Stewart Solution ManualAndrea Maxcy100% (30)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Constants and Key Equations in Chemicall ReactionDocument5 pagesConstants and Key Equations in Chemicall ReactionFrancisca BrazNo ratings yet
- Assignment - 2Document20 pagesAssignment - 2comedy worldNo ratings yet
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghNo ratings yet
- Midterm CheatsheetDocument3 pagesMidterm CheatsheetJoel Tan Yi JieNo ratings yet
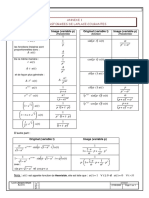
- T U P A P: Annexe 1 Transformees de Laplace CourantesDocument1 pageT U P A P: Annexe 1 Transformees de Laplace CourantesPierre DIAMANE SENGHORNo ratings yet
- Chapter 2 BDocument11 pagesChapter 2 BStefanPerendijaNo ratings yet
- Thermo Equations F21Document3 pagesThermo Equations F21BenNo ratings yet
- Problem 2.14: Given: FindDocument1 pageProblem 2.14: Given: FindKauê BrittoNo ratings yet
- Vector Derivatives: Ds DX 1 ( Det G)Document5 pagesVector Derivatives: Ds DX 1 ( Det G)Peter He ZhengNo ratings yet
- Formulario Física IIDocument1 pageFormulario Física IIelbag2004No ratings yet
- Evidence Consolidation ActivityDocument60 pagesEvidence Consolidation ActivityAlonso GalvisNo ratings yet
- SlatteryWhitaker 2010ms28 PDFDocument8 pagesSlatteryWhitaker 2010ms28 PDFOscar A. LuévanoNo ratings yet
- Classical Mechanics QuizDocument4 pagesClassical Mechanics QuizeveryoneMD100% (3)
- F (T) DV DT M B F Du DX E DX: Forces UnidimensionalsDocument3 pagesF (T) DV DT M B F Du DX E DX: Forces UnidimensionalsJosé Luis Reyes CalderónNo ratings yet
- 5-Summary For Lectures 1,2,3,4Document17 pages5-Summary For Lectures 1,2,3,4losblancos1No ratings yet
- Formula SheetsDocument4 pagesFormula SheetsblissNo ratings yet
- 4.3 PT1: First Order Lag (Single Capacity) : 4.3.1 General PropertiesDocument18 pages4.3 PT1: First Order Lag (Single Capacity) : 4.3.1 General PropertiesAngelaNo ratings yet
- 1 Output Controllability: MAE 280A 1 Maur Icio de OliveiraDocument10 pages1 Output Controllability: MAE 280A 1 Maur Icio de OliveiraMouliNo ratings yet
- Final PDFDocument13 pagesFinal PDFAlexandre Magno Bernardo FontouraNo ratings yet
- Termo Tarea 1Document7 pagesTermo Tarea 1EDGARDO MENDOZA ISUSQUIZANo ratings yet
- 09142710102012introducao A Fisica Estatistica Aula 9Document17 pages09142710102012introducao A Fisica Estatistica Aula 9Rafael BonatoNo ratings yet
- ME601: Assignment 2Document1 pageME601: Assignment 2Ashish ManwarNo ratings yet
- 2017optimalcontrol Solution AprilDocument4 pages2017optimalcontrol Solution Aprilenrico.michelatoNo ratings yet
- Brownian MotionDocument6 pagesBrownian MotionStefanPerendijaNo ratings yet
- 3 The First Law: The Machinery: Solutions To ExercisesDocument13 pages3 The First Law: The Machinery: Solutions To ExercisesRenan Gustavo PazNo ratings yet
- Lecture8 2023Document17 pagesLecture8 2023mr.furqatjonNo ratings yet
- Lec 22Document4 pagesLec 22iambizzmanNo ratings yet
- Formulário Termodinâmica IDocument2 pagesFormulário Termodinâmica IJoana CostaNo ratings yet
- EquationDocument1 pageEquationTommy PanyaratNo ratings yet
- Fismat UasDocument22 pagesFismat UasNoviaNo ratings yet
- Lampiran Matlab No.4 1. Subprogram: FunctionDocument8 pagesLampiran Matlab No.4 1. Subprogram: FunctionDwiiI.LestariNo ratings yet
- TelegrphDocument4 pagesTelegrphimohammadghiyasiNo ratings yet
- ACTSC445 - Assignment 1 (Q2-Q6) : Ahad Shoaib - 20634235 October 15, 2018Document9 pagesACTSC445 - Assignment 1 (Q2-Q6) : Ahad Shoaib - 20634235 October 15, 2018Ahad ShoaibNo ratings yet
- Dis 1Document4 pagesDis 1Ayush GuptaNo ratings yet
- Formulario Ciencias de Los Materiales Prueba 1 - Copia-1 PDFDocument15 pagesFormulario Ciencias de Los Materiales Prueba 1 - Copia-1 PDFIGNACIO JAVIER MACHUCA VALDIVIANo ratings yet
- Formulasfq IDocument2 pagesFormulasfq IApple ShinigamiNo ratings yet
- Problem 2.22 PDFDocument2 pagesProblem 2.22 PDFKauê BrittoNo ratings yet
- PlasticityDocument16 pagesPlasticitySebastiao SilvaNo ratings yet
- EM wave: 1 = 0 f (x−vt) =f (kx−ωt) = cos θ+ j sin θDocument2 pagesEM wave: 1 = 0 f (x−vt) =f (kx−ωt) = cos θ+ j sin θ阿御No ratings yet
- The Three Laws of Thermodynamics: Summary For CH 1,2,3,4,5,6,7Document17 pagesThe Three Laws of Thermodynamics: Summary For CH 1,2,3,4,5,6,7Rohit SharmaNo ratings yet
- 16 562ln08Document9 pages16 562ln08sammy wanakaiNo ratings yet
- Lecture 27: Green's TheoremDocument3 pagesLecture 27: Green's TheoremH Aries OñaNo ratings yet
- Identidades y Propiedades Matemáticas.: = − 2 α α α cos cos cos ± = ⋅ ⋅ m sen ω = + 2 = + 2Document1 pageIdentidades y Propiedades Matemáticas.: = − 2 α α α cos cos cos ± = ⋅ ⋅ m sen ω = + 2 = + 2LEONELA REYESNo ratings yet
- Exam 2 FormulaDocument4 pagesExam 2 Formulatapanmukhopadhyay066No ratings yet
- Useful Formulae: x + γx˙ + ω x = fDocument4 pagesUseful Formulae: x + γx˙ + ω x = fjecabuzzNo ratings yet
- Propulsion NotesDocument20 pagesPropulsion NotesscottNo ratings yet
- Date PDFDocument25 pagesDate PDFSiddharth RaviNo ratings yet
- Topic 2 Non Steady State DiffusionDocument5 pagesTopic 2 Non Steady State DiffusionLorraineNo ratings yet
- Chapter 3 - Section B - Non-Numerical SolutionsDocument12 pagesChapter 3 - Section B - Non-Numerical SolutionsAwaludin R FirmanshahNo ratings yet
- Topic 2 Non Steady State DiffusionDocument5 pagesTopic 2 Non Steady State DiffusionLorraineNo ratings yet
- ELEN3012 - 2020 Part 2Document7 pagesELEN3012 - 2020 Part 2Bongani MofokengNo ratings yet
- Formulario 1PP - 2015Document2 pagesFormulario 1PP - 2015davidNo ratings yet
- EC331 M1 SolutionDocument2 pagesEC331 M1 SolutionBushra MamoudNo ratings yet
- MIT8 223IAP17 Lec4Document8 pagesMIT8 223IAP17 Lec4Yury Parada CanoNo ratings yet
- % %× VCT) PM : F (NewtonDocument7 pages% %× VCT) PM : F (NewtonJayNo ratings yet
- LCHOsolnDocument4 pagesLCHOsolnDaniela F L BNo ratings yet
- Tugas - 1 - PSPK Firstiando YudaDocument10 pagesTugas - 1 - PSPK Firstiando YudaBrayonoFlo100% (1)
- Chapter 2 FormulasDocument6 pagesChapter 2 FormulasShellyNo ratings yet