You might also like
- Introduction to Geological Maps and Structures: Pergamon International Library of Science, Technology, Engineering and Social StudiesFrom EverandIntroduction to Geological Maps and Structures: Pergamon International Library of Science, Technology, Engineering and Social StudiesRating: 5 out of 5 stars5/5 (1)
- 4A-Geology and TopographyDocument13 pages4A-Geology and Topographypromothes476No ratings yet
- Lab 2BDocument9 pagesLab 2BalipNo ratings yet
- Geological MappingDocument20 pagesGeological MappingIkhwan Z.100% (13)
- Underground Geologic Mapping - February 2000 (Vol. 69, No. 6) - ICMJ's Prospecting and Mining JournalDocument3 pagesUnderground Geologic Mapping - February 2000 (Vol. 69, No. 6) - ICMJ's Prospecting and Mining Journalagvega69109No ratings yet
- Portraits of the Earth Reveal Geologic MapsDocument20 pagesPortraits of the Earth Reveal Geologic MapsAdept Titu EkiNo ratings yet
- Chapter-12 Structural GeologyDocument21 pagesChapter-12 Structural GeologySaketh RamNo ratings yet
- 2021 Midterm Assessment EESC252 Geology for EngineersDocument11 pages2021 Midterm Assessment EESC252 Geology for Engineerspb.69.420No ratings yet
- Exploration and Mapping TechniquesDocument12 pagesExploration and Mapping TechniquesEstephanny Watsson G. HzNo ratings yet
- Geological Maps 2022Document13 pagesGeological Maps 2022Kisaakye GraceNo ratings yet
- Geo Lab 2aDocument7 pagesGeo Lab 2aYu WanNo ratings yet
- Geology Final ReqsDocument40 pagesGeology Final Reqsjcb buragaNo ratings yet
- Calculation: - Page 7 of 7Document9 pagesCalculation: - Page 7 of 7l3gsdNo ratings yet
- Structural Geology and Rock Mechanics-3Document23 pagesStructural Geology and Rock Mechanics-3francessich0% (1)
- Table Des Matières: Geology - Chapter 04: Geological MapsDocument9 pagesTable Des Matières: Geology - Chapter 04: Geological MapsAlemkeng BrendaNo ratings yet
- Types of Geological Subsurface MapsDocument8 pagesTypes of Geological Subsurface MapsMohamed SadekNo ratings yet
- SL No. 3 Structural Geology Through Maps 22Document23 pagesSL No. 3 Structural Geology Through Maps 22Aniket KannoujiyaNo ratings yet
- Structural Geology and Rocks Mechanics: Presented by Group 4Document38 pagesStructural Geology and Rocks Mechanics: Presented by Group 4Pew JuzzNo ratings yet
- Ground Movement Prediction Due To Block Caving Mining Geometry Using GISDocument10 pagesGround Movement Prediction Due To Block Caving Mining Geometry Using GISNelsonWakumNo ratings yet
- Plotting Geological StructuresDocument16 pagesPlotting Geological StructuresThãshñêëShävNo ratings yet
- GeologyDocument79 pagesGeologyFranshwa SalcedoNo ratings yet
- Lab Inclined BeddingDocument12 pagesLab Inclined BeddingHarith Adhwa Zemee0% (1)
- Bahan GalianDocument26 pagesBahan Galianuswatun khoiriyahNo ratings yet
- Essential Tools for Geologists - How to Read Topographic MapsDocument5 pagesEssential Tools for Geologists - How to Read Topographic MapsbihanjiangNo ratings yet
- Geological Survey GuideDocument66 pagesGeological Survey GuidesabirfurqanNo ratings yet
- Plot Subsurface Geology from MapsDocument11 pagesPlot Subsurface Geology from MapsKaizoku-ONo ratings yet
- Mapuse Map Projections PDFDocument26 pagesMapuse Map Projections PDFskNo ratings yet
- Toplap (Figure 4.22) - An Analogue To This Is A Perfect Set of Cross-Stratified BedsDocument2 pagesToplap (Figure 4.22) - An Analogue To This Is A Perfect Set of Cross-Stratified BedsdelacourNo ratings yet
- Introduction to geological mapsDocument14 pagesIntroduction to geological mapsIshtiaq AhmadNo ratings yet
- MGB MC 2000-33Document7 pagesMGB MC 2000-33bjgaiteraroyalcoNo ratings yet
- Stratigraphy Maps & DiagramsDocument8 pagesStratigraphy Maps & DiagramsweldsvNo ratings yet
- Geology horizon definition and typesDocument3 pagesGeology horizon definition and typesCassielAlexzylalas LiambaNo ratings yet
- Geomorphometry and Landform Mapping, What Is A LandformDocument13 pagesGeomorphometry and Landform Mapping, What Is A LandformSaxenaNo ratings yet
- Intro and Litreature of Pulau Mawar ReportDocument8 pagesIntro and Litreature of Pulau Mawar ReportKerol Kerol Kerol100% (1)
- PGE508-608 Revision 1Document37 pagesPGE508-608 Revision 1Raed Al-nomanNo ratings yet
- Subsurface GeologyDocument42 pagesSubsurface Geologychu ANo ratings yet
- Various Objectives of Field Work: MS AssignmentDocument15 pagesVarious Objectives of Field Work: MS AssignmentayeshamajidNo ratings yet
- Basics of Geologic MapsDocument4 pagesBasics of Geologic Mapsthiruvin000No ratings yet
- Final Exam Covers Geological Maps, Rock PropertiesDocument28 pagesFinal Exam Covers Geological Maps, Rock Propertieswoi mariaNo ratings yet
- Image Interpretation and Processing TechniquesDocument18 pagesImage Interpretation and Processing TechniquesRasoolKhadibiNo ratings yet
- Landscape Arch. BasicsDocument24 pagesLandscape Arch. BasicsParz RafaelNo ratings yet
- CGE416 Chapter 3 GeophysicsDocument132 pagesCGE416 Chapter 3 GeophysicsNurfatini CheNo ratings yet
- Report Fault Bedding 2bDocument6 pagesReport Fault Bedding 2bHarith Adhwa ZemeeNo ratings yet
- Nhess 14 1773 2014Document16 pagesNhess 14 1773 2014Wilfredo Sulla HuillcaNo ratings yet
- Structural Geology DraftDocument71 pagesStructural Geology DraftKean Ahlbrix GaspeNo ratings yet
- The Geologic Column of Missouri - Vol 3 - Issue 2Document6 pagesThe Geologic Column of Missouri - Vol 3 - Issue 2limlerianNo ratings yet
- Lineament Density From LandsatDocument12 pagesLineament Density From LandsatImam Muhajjir Fakhri PutraNo ratings yet
- Practical 3: Site Evaluation TechniquesDocument63 pagesPractical 3: Site Evaluation TechniquesIbrahem AljeelaniNo ratings yet
- Gey 222 Structural Geology IDocument11 pagesGey 222 Structural Geology IUnigwe Chinanu OdinakaNo ratings yet
- GeomorphMapping53 FullDocument5 pagesGeomorphMapping53 FullTheresya SarangaNo ratings yet
- MBSD EIS Comments - GeologyDocument11 pagesMBSD EIS Comments - Geologychris_mclindonNo ratings yet
- Chap1-GeologicMapsDocument15 pagesChap1-GeologicMapsLyra Mae VillardaNo ratings yet
- Mapping shallow karstic cavities using microgravity and GPRDocument11 pagesMapping shallow karstic cavities using microgravity and GPRLuis Alfredo Marquez CaicedoNo ratings yet
- GEO3Z03 Structure Mapping Tutorial Winter 2002: Horiz Onta L Horiz Onta LDocument9 pagesGEO3Z03 Structure Mapping Tutorial Winter 2002: Horiz Onta L Horiz Onta LRene HamiltonNo ratings yet
- Lecture 4 GEOLOGYDocument10 pagesLecture 4 GEOLOGYnattydreadfathelahNo ratings yet
- Ranalli 1974Document8 pagesRanalli 1974Som DevNo ratings yet
- 4 - Espallardo-Ortiz (Geological Maps - PPT)Document30 pages4 - Espallardo-Ortiz (Geological Maps - PPT)Estelle Joy OrtizNo ratings yet
- Geomorphic Expression of FaultsDocument2 pagesGeomorphic Expression of FaultsLeonardo Ojeda PalmaNo ratings yet
- Temporal-Spatial Distribution of Oceanic Vertical Deflections Determined by TOPEX Poseidon and Jason-1-2 MissionsDocument6 pagesTemporal-Spatial Distribution of Oceanic Vertical Deflections Determined by TOPEX Poseidon and Jason-1-2 MissionsSOL GABRIELA ANALIA SOCOLA CHAVEZNo ratings yet
- UPVM-Social Science 1Document4 pagesUPVM-Social Science 1Eliza CanabalNo ratings yet
- HEADER-FOOTERDocument1 pageHEADER-FOOTERARIANNE JADE ORBISTANo ratings yet
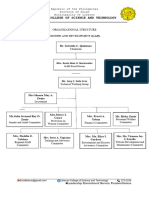
- GAD-ORG.STRUC.Document1 pageGAD-ORG.STRUC.ARIANNE JADE ORBISTANo ratings yet
- Arianne Evaluation 2022 2023Document3 pagesArianne Evaluation 2022 2023ARIANNE JADE ORBISTANo ratings yet
- ZUBIAGA, MICKEL DAVE R. (20210018) BSHRMDocument3 pagesZUBIAGA, MICKEL DAVE R. (20210018) BSHRMARIANNE JADE ORBISTANo ratings yet
- Arianne Evaluation 2022 2023Document3 pagesArianne Evaluation 2022 2023ARIANNE JADE ORBISTANo ratings yet
- Detailed-Lesson-Plan-JHS-Grade-10 (1)Document3 pagesDetailed-Lesson-Plan-JHS-Grade-10 (1)ARIANNE JADE ORBISTANo ratings yet
- Schedule For Demo Teaching - FINALDocument4 pagesSchedule For Demo Teaching - FINALARIANNE JADE ORBISTANo ratings yet
- Pag-Ibig - Members Contribution Dec. 2022Document4 pagesPag-Ibig - Members Contribution Dec. 2022ARIANNE JADE ORBISTANo ratings yet
- Purposive Communication BSNED SyllabusDocument9 pagesPurposive Communication BSNED SyllabusARIANNE JADE ORBISTANo ratings yet
- SYLLABUS Readings BSNEDDocument16 pagesSYLLABUS Readings BSNEDARIANNE JADE ORBISTANo ratings yet
- Module UNIT 2.1Document17 pagesModule UNIT 2.1ARIANNE JADE ORBISTANo ratings yet
- Report MasteralDocument8 pagesReport MasteralARIANNE JADE ORBISTANo ratings yet
- Instructional Supervision For PractionersDocument39 pagesInstructional Supervision For PractionersARIANNE JADE ORBISTANo ratings yet
- GeoEng - JD HendersonDocument4 pagesGeoEng - JD HendersonARIANNE JADE ORBISTANo ratings yet
- Chapter 2 Mineralogy Reviewer 1Document8 pagesChapter 2 Mineralogy Reviewer 1ARIANNE JADE ORBISTANo ratings yet
- Set12 Metallurgy 2,3,4,5,6Document19 pagesSet12 Metallurgy 2,3,4,5,6Pritamjit RoutNo ratings yet
- ERRI B12 Rp17 - 207Document10 pagesERRI B12 Rp17 - 207Dragan NedicNo ratings yet
- (BS EN 594 - 1996) - Timber Structures. Test Methods. Racking Strength and Stiffness of Timber Frame Wall Panels.Document16 pages(BS EN 594 - 1996) - Timber Structures. Test Methods. Racking Strength and Stiffness of Timber Frame Wall Panels.Adel100% (1)
- Al-Kamyani Et Al. - 2019 - Impact of Shrinkage On Crack Width and DeflectionsDocument10 pagesAl-Kamyani Et Al. - 2019 - Impact of Shrinkage On Crack Width and DeflectionsviolettaNo ratings yet
- Syllabus Ansys Workbench Training ChandigarhDocument4 pagesSyllabus Ansys Workbench Training ChandigarhKeshav CarpenterNo ratings yet
- Shear Behaviour and Strength Design of Cellular Beams With Circular or Elongated OpeningsDocument17 pagesShear Behaviour and Strength Design of Cellular Beams With Circular or Elongated OpeningsAhmedFranzNo ratings yet
- Effect of Aggregate Quality on Concrete PropertiesDocument8 pagesEffect of Aggregate Quality on Concrete PropertiesElakkiya KarthicNo ratings yet
- Fundamentals of RheologyDocument76 pagesFundamentals of Rheologytonysanchez67No ratings yet
- Snap FitsDocument11 pagesSnap FitsVijaya KumarNo ratings yet
- TP 1Document47 pagesTP 1Md. Moshiur RahmanNo ratings yet
- Behaviour of 3D-Panels For Structural Applications Under General Loading: A State-Of-The-ArtDocument10 pagesBehaviour of 3D-Panels For Structural Applications Under General Loading: A State-Of-The-ArtVirat DesaiNo ratings yet
- Astm A706-16Document7 pagesAstm A706-16李明环100% (1)
- FormingDocument381 pagesFormingArjun RoyNo ratings yet
- Mechanical Properties of MatterDocument5 pagesMechanical Properties of MatterwscienceNo ratings yet
- Yieldline TheoryDocument50 pagesYieldline TheorylivNo ratings yet
- Capturing Strain Localization Behind A Geosynthetic-Reinforced Soil WallDocument29 pagesCapturing Strain Localization Behind A Geosynthetic-Reinforced Soil WallmohanNo ratings yet
- BBS PresentationDocument29 pagesBBS PresentationSachidananda SwarNo ratings yet
- Fredrich Coblentz Fassum Primer Stresses Adjacent To Salt BodiesDocument67 pagesFredrich Coblentz Fassum Primer Stresses Adjacent To Salt BodiesGlusmNo ratings yet
- E2760-10E2 Creep-Fatigue Crack Growth TestingDocument19 pagesE2760-10E2 Creep-Fatigue Crack Growth TestingAnonymous B7pghhNo ratings yet
- Ernesto GuadesDocument11 pagesErnesto GuadesAliNo ratings yet
- Design of Mini Hydraulic Press Machine (2) HyDocument48 pagesDesign of Mini Hydraulic Press Machine (2) Hyyifruseyife60No ratings yet
- To VijayaragavanDocument9 pagesTo VijayaragavanPrince LazarNo ratings yet
- Asiri National Project PDFDocument317 pagesAsiri National Project PDFGabriel BroascaNo ratings yet
- Understanding Loss Modulus and Tan DeltaDocument7 pagesUnderstanding Loss Modulus and Tan DeltaJohn BenedictNo ratings yet
- Experimental Investigation of Tensile Properties of Ti-6Al-4V Alloy at Elevated TemperatureDocument5 pagesExperimental Investigation of Tensile Properties of Ti-6Al-4V Alloy at Elevated TemperaturesenthilNo ratings yet
- Fatigue Testing and Analysis of ResultsDocument18 pagesFatigue Testing and Analysis of ResultsAndrei CostacheNo ratings yet
- chp6 SoluDocument25 pageschp6 SoluNooruddin SheikNo ratings yet
- MDSP T2Document100 pagesMDSP T2Arnz BibosoNo ratings yet
- Design of Flexible PavementDocument43 pagesDesign of Flexible Pavementtarakeswara rao kantubhukta100% (1)
- Steel Structures MCQDocument60 pagesSteel Structures MCQmidhun ChakravarthiNo ratings yet