You might also like
- Fundamentals of Fully-Integrated Voltage Regulators: Yan Lu University of Macau, Macao, ChinaDocument81 pagesFundamentals of Fully-Integrated Voltage Regulators: Yan Lu University of Macau, Macao, ChinadxzhangNo ratings yet
- 07 AC ElectricityDocument16 pages07 AC ElectricityvaradarajNo ratings yet
- Activity5 Group1Document24 pagesActivity5 Group1NicoNo ratings yet
- Solar System Worksheets For KS3Document7 pagesSolar System Worksheets For KS3ashleyNo ratings yet
- Conversions and Calculations Used by Pharmacy TechniciansDocument47 pagesConversions and Calculations Used by Pharmacy Technicianstorres_jaime22100% (11)
- 357-05 Kessler Drive Axle AssemblyDocument84 pages357-05 Kessler Drive Axle AssemblyGeorge Jhonson100% (7)
- Lecture - 04 Lecture - 04: EEN-206: Power Transmission and Distribution EEN-206: Power Transmission and DistributionDocument19 pagesLecture - 04 Lecture - 04: EEN-206: Power Transmission and Distribution EEN-206: Power Transmission and Distributionguddu guptaNo ratings yet
- Alexander-Sadiku Fundamentals of Electric CircuitsDocument19 pagesAlexander-Sadiku Fundamentals of Electric CircuitsTarikuNo ratings yet
- AC CIRCUITS - Magnetic Coupled CircuitsDocument19 pagesAC CIRCUITS - Magnetic Coupled CircuitsAhmad RafiqanTB0009No ratings yet
- CBSE Class 12 Physics Question Paper Solution 2020 Set 55 3 1Document16 pagesCBSE Class 12 Physics Question Paper Solution 2020 Set 55 3 1Harsh RuhalNo ratings yet
- Revision Lecture 2: PhasorsDocument43 pagesRevision Lecture 2: PhasorsMohsin NaushadNo ratings yet
- Lesson9 PDFDocument49 pagesLesson9 PDFmfqcNo ratings yet
- Lesson 9Document49 pagesLesson 9write2arshad_mNo ratings yet
- MS Physics Set Blind 2019Document13 pagesMS Physics Set Blind 2019Ankur GhoshNo ratings yet
- Lecture Notes 1Document25 pagesLecture Notes 1muhammadmusakhanNo ratings yet
- Impedance Compensation Networks For The Lossy Voice-Coil Inductance of Loudspeaker DriversDocument8 pagesImpedance Compensation Networks For The Lossy Voice-Coil Inductance of Loudspeaker Driversmiguel millanNo ratings yet
- Ebook - Eng - Electronics - Theory - Operational AmplifiersDocument35 pagesEbook - Eng - Electronics - Theory - Operational AmplifiersVijay SurendranNo ratings yet
- Use of Shunt & Series Capacitors in Transmission LinesDocument6 pagesUse of Shunt & Series Capacitors in Transmission LinesRiyah_Rae86% (7)
- Uk PDFDocument1 pageUk PDFAg CristianNo ratings yet
- EE 147 - Lecture 1Document25 pagesEE 147 - Lecture 1Rovick TarifeNo ratings yet
- Chapter 13 - 2 Energy in Coupled CircuitsDocument17 pagesChapter 13 - 2 Energy in Coupled CircuitsAgung FauziNo ratings yet
- Tuen Voltage AmplifirDocument7 pagesTuen Voltage Amplifirkaran007_mNo ratings yet
- BASIC Electronics PART 5Document7 pagesBASIC Electronics PART 5BETTY UYNo ratings yet
- Power System Analysis I (Eee 471) Components Models and Per Unit (Pu) AnalysisDocument65 pagesPower System Analysis I (Eee 471) Components Models and Per Unit (Pu) AnalysisFatihNo ratings yet
- Z. ExamplesDocument28 pagesZ. ExamplesShahbaz QamarNo ratings yet
- Feedback RazaviDocument99 pagesFeedback RazaviAlice SilvaNo ratings yet
- Network SynthesisDocument12 pagesNetwork SynthesisHarshit GargNo ratings yet
- 15EC303 - Ass I - Aug2017 PDFDocument2 pages15EC303 - Ass I - Aug2017 PDFSlim ShadyNo ratings yet
- 13 2006 Winai Jaikla ECTIDocument4 pages13 2006 Winai Jaikla ECTIanantNo ratings yet
- EE2003 EE2003 Circuit Theory Circuit TheoryDocument9 pagesEE2003 EE2003 Circuit Theory Circuit TheoryAshton Poovarasu JhonsonNo ratings yet
- 12 Physics MS 2 - 16.01.23Document5 pages12 Physics MS 2 - 16.01.23Moumita PatiNo ratings yet
- New Wireless Power Transfer Via MagneticDocument5 pagesNew Wireless Power Transfer Via Magneticseraph705No ratings yet
- Chenming Hu Ch1 SlidesDocument34 pagesChenming Hu Ch1 Slides詹浩正No ratings yet
- مهم جداDocument23 pagesمهم جداMustafa AlhumayreNo ratings yet
- An Independently Controlled Single-InputDocument10 pagesAn Independently Controlled Single-Inputvino drenNo ratings yet
- Research ArticleDocument10 pagesResearch ArticleMarolop CoocaaNo ratings yet
- Modul Skor A+ Fizik JPNS 2014 - Elektronik - SkemaDocument8 pagesModul Skor A+ Fizik JPNS 2014 - Elektronik - SkemaCikita IsmailNo ratings yet
- BASIC Electronics PART 4Document5 pagesBASIC Electronics PART 4BETTY UYNo ratings yet
- BSEB 12th Physics Model Paper Set - 2 1Document15 pagesBSEB 12th Physics Model Paper Set - 2 1mohitsingh00122No ratings yet
- Power Diode WorksheetDocument20 pagesPower Diode WorksheetLộc Phạm vănNo ratings yet
- Signal and System Lecture 20Document18 pagesSignal and System Lecture 20ali_rehman87No ratings yet
- Department of Pre-University Education Ii Puc Annual Examination, May-2022 Scheme of Evaluation - Physics (33 NS)Document11 pagesDepartment of Pre-University Education Ii Puc Annual Examination, May-2022 Scheme of Evaluation - Physics (33 NS)Rahil HassanNo ratings yet
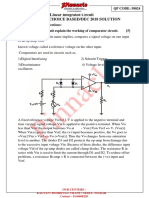
- Lic Solution 4Document24 pagesLic Solution 4Muiz TankiNo ratings yet
- 3.0 Feedback in AmplifiersDocument35 pages3.0 Feedback in AmplifiersAlfred Anotida MugumwaNo ratings yet
- Chapter-3 - AC Circuits - MG HusseinDocument20 pagesChapter-3 - AC Circuits - MG Husseinضياء بن احمد الكباريNo ratings yet
- Semiconductor Fundamentals 2020Document59 pagesSemiconductor Fundamentals 2020RafaelNo ratings yet
- 4 - Module-1Document53 pages4 - Module-1f20230222No ratings yet
- 3 WeekDocument12 pages3 WeeksimayyilmazNo ratings yet
- 2022 16C Further Practice DC AnsDocument4 pages2022 16C Further Practice DC AnsPk PlooNo ratings yet
- Objective:: TheoryDocument5 pagesObjective:: TheoryAkhilesh Kumar MishraNo ratings yet
- Lab 1Document7 pagesLab 1Syed AsfandyarNo ratings yet
- Impedance Matching and TuningDocument12 pagesImpedance Matching and Tuningdoaah hakimNo ratings yet
- Chapter 1 Electrons and Holes in Semiconductors: 1.1 Silicon Crystal StructureDocument31 pagesChapter 1 Electrons and Holes in Semiconductors: 1.1 Silicon Crystal Structuremorcov19No ratings yet
- Exp6 1Document12 pagesExp6 1Joel CatapangNo ratings yet
- Exp6 1Document12 pagesExp6 1Joel CatapangNo ratings yet
- Electrical Sciences EEE F111Document13 pagesElectrical Sciences EEE F111Kriti TambareNo ratings yet
- Es2c0 SlidesDocument108 pagesEs2c0 SlidesNamita GeraNo ratings yet
- Ion Selective ElectrodesDocument51 pagesIon Selective ElectrodesAnas M.No ratings yet
- Double Stub and LC Matching CircuitDocument31 pagesDouble Stub and LC Matching CircuitVijay ReddyNo ratings yet
- MC2 Lec ch14Document38 pagesMC2 Lec ch145수정No ratings yet
- Alternating Current Case Source Base SolutionsDocument7 pagesAlternating Current Case Source Base SolutionsArnav ShuklaNo ratings yet
- Electronics 3 Checkbook: The Checkbooks SeriesFrom EverandElectronics 3 Checkbook: The Checkbooks SeriesRating: 5 out of 5 stars5/5 (1)
- SAE L6, Steel Grades, Tool SteelDocument1 pageSAE L6, Steel Grades, Tool SteelMayur12345dt0% (1)
- UsbFix ReportDocument2 pagesUsbFix ReportBourama DIAKITENo ratings yet
- CEN 372: Transportation Engineering Lab I: Final ExaminationDocument3 pagesCEN 372: Transportation Engineering Lab I: Final ExaminationSNKNo ratings yet
- glossary.sty v 2.4: L TEX 2ε Package to Assist Generating GlossariesDocument55 pagesglossary.sty v 2.4: L TEX 2ε Package to Assist Generating GlossariesDuong ThaoNo ratings yet
- Electronegativity ScalesDocument8 pagesElectronegativity ScalesrashidNo ratings yet
- The Winkler Determination of Dissolved Oxygen in Water Is BasedDocument3 pagesThe Winkler Determination of Dissolved Oxygen in Water Is Basedliz_hobbs79No ratings yet
- Blockchain Report SeminarDocument27 pagesBlockchain Report SeminarArsalan MakkiNo ratings yet
- Custom Auditing in SSIS: - Meghana VasavadaDocument39 pagesCustom Auditing in SSIS: - Meghana Vasavadajlcastilho2010No ratings yet
- GradDocument74 pagesGradMoHamedNo ratings yet
- CapacitorDocument35 pagesCapacitorjolieprincesseishimweNo ratings yet
- Hotelecom Interface Protocol - White PaperDocument6 pagesHotelecom Interface Protocol - White PaperMichael Davis OngNo ratings yet
- Oxidative Addition and Reductive Elimination: Peter H.M. BudzelaarDocument23 pagesOxidative Addition and Reductive Elimination: Peter H.M. BudzelaarRana Hassan Tariq100% (1)
- LOCAL BUCKLING2 VisualBeeDocument24 pagesLOCAL BUCKLING2 VisualBeeMart Brevin BitonNo ratings yet
- Bed Configuration of HotelDocument12 pagesBed Configuration of HotelMarnieNo ratings yet
- Zener DiodeDocument14 pagesZener Diodes211053176No ratings yet
- Quaternary Science Reviews: Jerome P. Reynard, Sarah WurzDocument17 pagesQuaternary Science Reviews: Jerome P. Reynard, Sarah WurzJerome ReynardNo ratings yet
- 200WNA1Document5 pages200WNA1James ArlanttNo ratings yet
- Interoperability 2G-to-3G-reselection PDFDocument94 pagesInteroperability 2G-to-3G-reselection PDFTú Nguyễn Ngọc100% (1)
- ANSI and ISO Geometric Tolerancing Symbols1Document5 pagesANSI and ISO Geometric Tolerancing Symbols1Mahender KumarNo ratings yet
- Wdi73120 HKDocument1 pageWdi73120 HKDel WNo ratings yet
- Analysys Mason Network Automation Survey Mar2020 Rma07Document15 pagesAnalysys Mason Network Automation Survey Mar2020 Rma07Ciki MonNo ratings yet
- C Training MaterialDocument179 pagesC Training MaterialSunil NmNo ratings yet
- University of Cambridge International Examinations General Certificate of Education Advanced LevelDocument20 pagesUniversity of Cambridge International Examinations General Certificate of Education Advanced LeveltakundavsNo ratings yet
- Equipment Auxiliary Equipment Remarks: Spare Parts Data Package (SPDP) ChecklistDocument11 pagesEquipment Auxiliary Equipment Remarks: Spare Parts Data Package (SPDP) ChecklistMohammed IlliasuddinNo ratings yet
- ENVL-12-Lab Report-Group 1-Nazia-SadiaDocument3 pagesENVL-12-Lab Report-Group 1-Nazia-SadiaSadia ShithyNo ratings yet
- Multi-Function Measuring Instrument: Testo 435 - The Allrounder For Ventilation and Indoor Air QualityDocument8 pagesMulti-Function Measuring Instrument: Testo 435 - The Allrounder For Ventilation and Indoor Air QualityZankar R ParikhNo ratings yet
- A Basic Method For Starch 2004Document5 pagesA Basic Method For Starch 2004JOHN ALEXIS MOSQUERA SEPULVEDANo ratings yet