0% found this document useful (0 votes)
587 views99 pagesFeedback Razavi
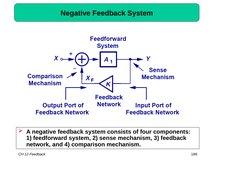
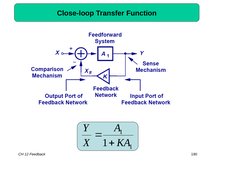
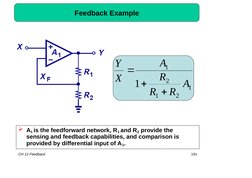
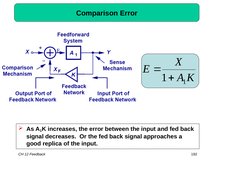
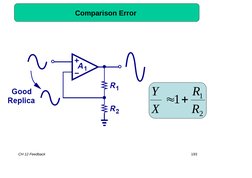
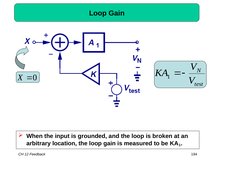
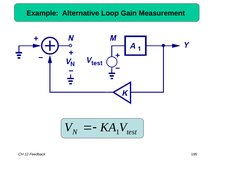
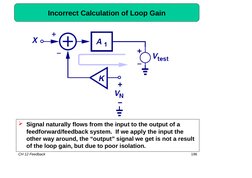
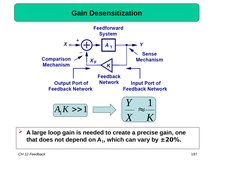
The document summarizes key concepts from Chapter 12 on feedback in electronic systems. It discusses the components of a negative feedback system and how feedback affects closed-loop transfer functions and error signals. It also describes how feedback can enhance bandwidth, modify input and output impedances, and linearize systems. Different types of amplifiers and how realistic models differ from ideal models are presented. Methods for sensing voltages and currents in feedback networks and examples of feedback topologies are summarized as well.
Uploaded by
Alice SilvaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
587 views99 pagesFeedback Razavi
The document summarizes key concepts from Chapter 12 on feedback in electronic systems. It discusses the components of a negative feedback system and how feedback affects closed-loop transfer functions and error signals. It also describes how feedback can enhance bandwidth, modify input and output impedances, and linearize systems. Different types of amplifiers and how realistic models differ from ideal models are presented. Methods for sensing voltages and currents in feedback networks and examples of feedback topologies are summarized as well.
Uploaded by
Alice SilvaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd