Professional Documents
Culture Documents
Bai Giang Ly Thuyet Dieu Khien Tu Dong
Uploaded by
caovanduy18092004Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Bai Giang Ly Thuyet Dieu Khien Tu Dong
Uploaded by
caovanduy18092004Copyright:
Available Formats
lOMoARcPSD|36575266
Bài giảng lý thuyết điều khiển tự động
Vật Lý Đại Cương (Hanoi University of Science)
Studocu n'est pas sponsorisé ou supporté par une université ou un lycée
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
MỤC LỤC
Lời nói đầu
Chƣơng 1: ĐẠI CƢƠNG VỀ HỆ THỐNG TỰ ĐỘNG .................................................................. 3
Chƣơng 2: MÔ TẢ TOÁN HỌC PHẦN TỬ VÀ HỆ THỐNG ĐIỀU KHIỂN ............................ 12
Chƣơng 3: ĐẶC TÍNH ĐỘNG HỌC CỦA HỆ THỐNG ............................................................ 55
Chƣơng 4: KHẢO SÁT TÍNH ỔN ĐỊNH HỆ THỐNG ĐIỀU KHIỂN ...................................... 71
Chƣơng 5: ĐÁNH GIÁ CHẤT LƢỢNG HỆ THỐNG ............................................................... 93
Chƣơng 6: THIẾT KẾ HỆ THỐNG LIÊN TỤC ........................................................................ 104
Chƣơng 7: MÔ TẢ TOÁN HỌC HỆ THỐNG RỜI RẠC ......................................................... 144
Chƣơng 8: THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC .................................................. 171
Chƣơng 9: HỆ THỐNG ĐIỀU KHIỂN PHI TUYẾN ................................................................ 206
Phụ lục Bảng biến đổi Laplace .................................................................................................. 224
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
LỜI NÓI ĐẦU
Lý thuyết điều khiển tự động là môn học dành cho sinh viên ngành Điện tử - Tự
động. Giáo trình Lý thuyết điều khiển tự động gồm có chín chƣơng:
Chƣơng 1: Đại cƣơng về hệ thống điều khiển tự động
Chƣơng 2: Mô tả toán học phần tử và hệ thống điều khiển
Chƣơng 3: Đặc tính động học của hệ thống tự động
Chƣơng 4: Khảo sát tính ổn định của hệ thống tự động
Chƣơng 5: Đánh giá chất lƣợng hệ thống điều khiển tự động
Chƣơng 6: Thiết kế hệ thống điều khiển liên tục
Chƣơng 7: Mô tả toán học hệ thống rời rạc
Chƣơng 8: Thiết kế hệ thống điều khiển rời rạc
Chƣơng 9: Hệ thống điều khiển phi tuyến
Đây là những nội dung tóm tắt giúp sinh viên tiếp thu đƣợc môn học một cách nhanh
chóng. Lần đầu biên soạn chắc chắn còn nhiều thiếu sót, mong nhận đƣợc sự những ý
kiến đóng góp của các bạn đồng nghiệp.
Bộ môn Điều khiển tự động
Ths. Trần Thị Hoàng Oanh
ii
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
Chƣơng 1
ĐẠI CƢƠNG VỀ
HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
1.1. KHÁI NIỆM ĐIỀU KHIỂN
Thí dụ 1: Lái xe với tốc độ 100km/h
- Mắt quan sát đồng hồ đo tốc độ v thu thập thông tin
- Bộ não điều khiển tăng tốc nếu v < 100km/h xử lý thông tin
giảm tốc nêu v > 100km/h
- Tay giảm ga hoặc tăng ga tác động lên hệ thống
Kết quả của quá trình điểu khiển trên: xe chạy với tốc độ “gần” bằng 100km/h
Định nghĩa: Điều khiển là quá trình thu thập thông tin, xử lý thông tin và tác
động lên hệ thống để đáp ứng của hệ thống “gần” với mục đích định trƣớc.
Khái niệm điều khiển trên là một khái niệm rất rộng, môn học này chỉ nghiên cứu lý
thuyết điều khiển các hệ thống kỹ thuật
Điều khiển tự động: là quá trình điều khiển không cần sự tác động của con
ngƣời
Tại sao cần phải điều khiển: vì
- Con ngƣời không thỏa mãn với đáp ứng của hệ thống.
TD: Điều hoà nhiệt độ vì không thỏa mãn với nhiệt độ nóng quá hoặc lạnh quá.
Ổn áp vì không thoả mãn với việc điện áp thay đổi thất thƣờng .
- Muốn tăng độ chính xác, hiệu quả kinh tế.
Các thành phần cơ bản của hệ thống điều khiển:
Hệ thống điều khiển gồm 3 thành phần cơ bản:
- Đối tƣợng điều khiển
- Cảm biến (hay thiết bị đo lƣờng)
- Bộ điều khiển
Sơ đồ khối hệ thống điều khiển thường gặp:
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
e(t) c(t)
r(t) u(t) Đối tƣợng
Bộ điều khiển
cht(t)
Cảm biến
Các ký hiệu viết tắt:
- r(t) (reference input): tín hiệu vào, tín hiệu chuẩn.
- c(t) (controlled output): tín hiệu ra
- cht(t): tín hiệu hồi tiếp
- e(t) (error): sai số
- u(t): tín hiệu điều khiển
Câu hỏi: Các thành phần cơ bản trong hệ thống lái xe trong TD1 là gì?
Thí dụ 2: Hãy xác định các thành phần
cơ bản trong hệ thống điều khiển mực
nƣớc đơn giản trong hình vẽ
Các bài toán cơ bản trong lĩnh vực điều khiển tự động:
Trong lĩnh vực điều khiển tự động có 3 vấn đề cần giải quyết là:
Phân tích hệ thống: Cho hệ thống tự động đã biết cấu trúc và thông số. Bài toán đặt
ra là tìm đáp ứng của hệ thống và đánh giá chất lƣợng.
Thiết kế hệ thống: Biết cấu trúc và thông số của đối tƣợng điều khiển. Bài toán đặt
ra là thiết kế bộ điều khiển để đƣợc hệ thống thỏa mãn các yêu cầu về chất lƣợng.
Nhận dạng hệ thống: Chƣa biết cấu trúc và thông số của hệ thống. Vấn đề đặt ra là
xác định cấu trúc và thông số của hệ thống.
Trong môn học này chỉ giải quyết bài toán phân tích và thiết kế hệ thống. Bài toán
nhận dạng hệ thống sẽ đƣợc nghiên cứu trong môn học khác.
1.2. CÁC NGUYÊN TẮC ĐIỀU KHIỂN
Các nguyên tắc điều khiển có thể xem là kim chỉ nam để thiết kế hệ thống điều
khiển đạt chất lƣợng cao và có hiệu quả kinh tế nhất.
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
Nguyên tắc 1: Nguyên tắc thông tin phản hồi
Muốn quá trình điều khiển đạt chất lƣợng cao, trong hệ thống phải tồn tại hai dòng
thông tin: 1 từ bộ điều khiển đến đối tƣợng và 1 từ đối tƣợng ngƣợc về bộ điều khiển
(dòng thông tin ngƣợc gọi là hồi tiếp).
Điều khiển không hồi tiếp (điều khiển vòng hở) không thề đạt chất lƣợng cao, nhất
là khi có nhiễu.
Các sơ đồ điều khiển dựa trên nguyên tắc thông tin phản hồi là:
Điều khiển bù nhiễu:
n(t)
r(t) u(t) c(t)
Bộ điều khiển Đối tƣợng
Điều khiển san bằng sai lệch:
r(t) e(t) c(t)
u(t)
+- Bộ điều khiển Đối tƣợng
cht(t)
Cảm biến
Điều khiển phối hợp:
n(t)
r(t) e(t) c(t)
u(t)
+ Bộ điều khiển Đối tƣợng
-
cht(t)
Cảm biến
Nguyên tắc 2: Nguyên tắc đa dạng tƣơng xứng
Muốn quá trình điều khiển có chất lƣợng thì sự đa dạng của bộ điều khiển phải
tƣơng xứng với sự đa dạng của đối tƣợng. Tính đa dạng của bộ điều khiển thể hiện ở khả
năng thu thập thông tin, lƣu trữ thông tin, truyền tin, phân tích xử lý, chọn quyết định,…
Ý nghĩa: Cần thiết kế bộ điều khiển phù hợp với đối tƣợng.
Thí dụ: Hãy so sánh yêu cầu chất lƣợng điều khiển và bộ điều khiển sử dụng trong
các hệ thống sau:
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
- Điều khiển nhiệt độ bàn ủi (chấp nhận sai số lớn) và điều khiển nhiệt độ lò sấy
(không chấp nhận sai số lớn).
- Điều khiển mực nƣớc trong bồn chứa khách sạn (chỉ cần đảm bảo luôn có nƣớc
trong bồn) với điều khiển mực chất lỏng trong các dây chuyền sản xuất (mực chất lỏng
cần giữ không đổi).
Nguyên tắc 3: Nguyên tắc bổ sung ngoài
Một hệ thống luôn tồn tại và hoạt động môi trƣờng cụ thể và có tác động qua lại chặt
chẽ với môi trƣờng đó. Nguyên tắc bổ sung ngoài thừa nhận có một đối tƣợng chƣa biết
(hộp đen) tác động vào hệ thống và ta phải điều khiển cả hệ thống lẫn hộp đen.
Ý nghĩa: Khi thiết kế hệ thống tự động, muốn hệ thống có chất lƣợng cao thì không
thể bỏ qua nhiễu.
Nguyên tắc 4: Nguyên tắc dự trữ
Vì nguyên tắc 3 luôn coi thông tin chƣa đầy đủ phải đề phòng các bất trắc xảy ra và
không đƣợc dùng toàn bộ lực lƣợng trong điều kiện bình thƣờng. Vốn dự trữ không sử
dụng, nhƣng cần để đảm bảo cho hệ thống vận hành an toàn.
Nguyên tắc 5: Nguyên tắc phân cấp
Đối với một hệ thống điều khiển phức tạp cần xây dựng nhiều lớp điều khiển bổ
sung cho trung tâm. Cấu trúc phân cấp thƣờng sử dụng là cấu trúc hình cây
Thí dụ:
- Hệ thống điều khiển giao thông đô thị hiện đại
- Hệ thống điều khiển dây chuyền sản xuất
Nguyên tắc 6: Nguyên tắc cân bằng nội
Mỗi hệ thống cần xây dựng cơ chế cân bằng nội để có khả năng tự giải quyết
những biến động xảy ra.
1.3. PHÂN LOẠI HỆ THỐNG ĐIỀU KHIỂN
Sự phân loại các hệ thống điều khiển chỉ mang tính qui ƣớc, có nhiều cách phân loại
khác nhau
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
Phân loại theo đặc điểm của hệ thống:
Hệ thống liên tục: tín hiệu vào, tín hiệu ra và tất cả tín hiệu trung gian truyền bên
trong hệ thống là tín hiệu liên tục. Hệ thống liên tục đƣợc mô tả bằng phƣơng trình vi
phân.
Hệ thống rời rạc: trong hệ thống có một điểm nào đó mà tín hiệu là rời rạc. Hệ
thống rời rạc đƣợc mô tả bằng phƣơng trình sai phân.
Hệ thống tuyến tính: hệ thống đƣợc mô tả bởi phƣơng trình vi phân / sai phân
tuyến tính.
Hệ thống phi tuyến: hệ thống đƣợc mô tả bởi phƣơng trình vi phân / sai phân phi
tuyến.
Hệ thống một ngõ vào – một ngõ ra SISO (Single Input – Single Output)
Hệ thống nhiều ngõ vào – nhiều ngõ ra MIMO (Multi Input – Multi Output)
Hệ thống bất biến theo thời gian: hệ số của phƣơng trình vi phân / sai phân mô
tả hệ thống không đổi
Hệ thống biến đổi theo thời gian: hệ số của phƣơng trình vi phân / sai phân mô
tả hệ thống thay đổi theo thời gian.
Trong môn học này chỉ tập trung nghiên cứu hệ thống tự động liên tục/ rời rạc, một
ngõ vào – một ngõ ra, tuyến tính, bất biến theo thời gian
Phân loại theo chiến lược điều khiển:
Mục tiêu điều khiển thƣờng gặp nhất là sai số giữa tín hiệu ra và tín hiệu vào chuẩn
càng nhỏ càng tốt. Tuỳ theo dạng tín hiệu vào mà ta có các loại điều khiển sau:
Điều khiển ổn định hoá:
Nếu tín hiệu chuẩn r(t) = hằng số, ta gọi là điều khiển ổn định hoá.
Điều khiển theo chƣơng trình:
Tín hiệu vào r(t) là hàm thay đổi theo thời gian nhƣng đã biết trƣớc.
Điều khiển theo dõi:
Tín hiệu vào r(t) là hàm không biết trƣớc theo thời gian.
Lịch sử phát triển lý thuyết điều khiển:
Điều khiển kinh điển: mô tả toán học dùng để phân tích và thiết kế hệ thống là
hàm truyền.
- Quỹ đạo nghiệm số
- Biểu đồ Nyquist, biểu đồ Bode
- Điều khiển PID (Proportional – Integral – Derivative)
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
Đặc điểm:
- Chỉ áp dụng đối với hệ tuyến tính bất biến một ngõ vào một ngõ ra
- Kỹ thuật thiết kế trong miền tần số
Điều khiển hiện đại: mô tả toán học dùng để phân tích và thiết kế hệ thống là hệ
phƣơng trình biến trạng thái.
- Điều khiển tối ƣu
- Lọc Kalman (ƣớc lƣợng trạng thái tối ƣu)
- Điều khiển thích nghi
- Điều khiển phi tuyến
- Điều khiển bền vững
Đặc điểm:
- Áp dụng đƣợc với hệ thống nhiều ngõ vào, nhiều ngõ ra, hệ thống biến đổi theo
thời gian.
- Kỹ thuật trong miền thời gian.
Điều khiển thông minh: về nguyên tắc không cần dùng mô hình toán học để thiết
kế hệ thống.
- Điều khiển dùng logic mờ
- Điều khiển dùng mạng nơron
- Điều khiển dùng thuật toán di truyền
- …
- Mô phỏng/bắt chƣớc các hệ thống thông minh sinh học.
- Thiết kế dựa vào kinh nghiệm (ĐK dùng logic mờ), thông số bộ điều khiển thay
đổi thông qua quá trình học (ĐK dùng mạng nơron),…
1.4. MỘT SỐ THÍ DỤ VỀ CÁC HỆ THỐNG TỰ ĐỘNG
Để hiểu đƣợc tƣờng tận và có thể thiết kế đƣợc các hệ thống điều khiển tự động,
ngoài lý thuyết điều khiển tự động, cần phải có kiến thức liên quan đến một số môn học
khác. Vì vậy, với mục đích cung cấp cho sinh viên cái nhìn tổng quan về hệ thống tự
động, các thí dụ dƣới đây chỉ trình bày sơ đồ khối.
1.4.1. Điều khiển nhiệt độ
- Nhiệt độ là đại lƣợng tham gia vào nhiều quá trình công nghệ sản xuất xi măng, gạch
men, nhựa, cao su, hoá dầu, thực phẩm,…
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
- Mục tiêu điều khiển thƣờng gặp là giữ cho nhiệt độ ổn định (điều khiển ổn định hóa)
hay điều khiển nhiệt độ thay đổi theo đặc tính thời gian định trƣớc (điều khiển theo
chƣơng trình)
Thí dụ 1: Hệ thống điều khiển ổn định nhiệt độ
Thí dụ 2: Hệ thống điều khiển nhiệt độ theo chƣơng trình
1.4.2. Điều khiển động cơ:
- Động cơ là thiết bị truyền động đƣợc sử dụng rất phổ biến trong máy móc, dây
chuyền sản xuất.
- Có 3 bài toán điều khiển động cơ thƣờng gặp:
Điều khiển tốc độ
Điều khiển vị trí
Điều khiển moment
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
Thí dụ: Hệ thống điều khiển tốc độ động cơ DC
1.4.3. Hệ thống điều khiển mực chất lỏng:
1.4.4. Hệ thống điều khiển máy công cụ bằng máy tính:
10
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 1: Đại cương về hệ thống tự động
11
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Chương 2
MÔ TẢ TOÁN HỌC
PHẦN TỬ& HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC
Đối tƣợng điều khiển rất đa dạng và có bản chất vật lý khác nhau, nhƣ động cơ, lò
nhiệt, máy bay, phản ứng hoá học… cần có cơ sở để phân tích, thiết kế các hệ thống
điều khiển có bản chất vật lý khác nhau. Cơ sở đó chính là toán học.
Có 2 phƣơng pháp để mô tả toán học hệ thống tự động đó là phương pháp hàm
truyền đạt và phương pháp biến trạng thái.
2.1. PHƢƠNG PHÁP HÀM TRUYỀN ĐẠT
2.1.1. PHÉP BIẾN ĐỔI LAPLACE
Định nghĩa:
Cho hàm f(t) là hàm xác định với mọi t 0 , biến đổi Laplace của f(t) là:
f (t ).e
st
L [ f (t )] F ( s) dt
0
Trong đó:
s: biến phức (biến Laplace) s j
: phần thực
: phần ảo
L : toán tử Laplace
F(s): biến đổi Laplace của hàm f(t)
Biến đổi Laplace tồn tại khi tích phân ở biểu thức định nghĩa trên hội tụ.
Biến đổi Laplace dùng để chuyển phƣơng trình vi phân → phƣơng trình đại số với
biến s.
Tính chất của phép biến đổi Laplace:
a. Tính tuyến tính:
Cho f1(t) và f2(t)là hai hàm theo thời gian. Giả sử:
L [ f1 (t )] F1 (s)
L [ f 2 (t )] F2 (s)
Thì L [af1 (t ) bf 2 (t )] aF1 (s) bF2 (s)
b. Định lý chậm trễ:
12
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Nếu f(t) đƣợc làm trễ một khoảng thời gian T, ta có hàm f(t-T). Khi đó:
L [ f (t T ) e sT L [ f (t )] e sT .F (s)
c. Ảnh của đạo hàm:
Nếu hàm f(t) có biến đổi Laplace là L [ f (t )] F (s) thì:
df (t )
L sF ( s) f (0 )
dt
Trong đó f (0 ) gọi là điều kiện đầu. Nếu f (0 ) = 0 thì:
df (t )
L sF ( s)
dt
d. Ảnh của tích phân:
Nếu hàm f(t) có biến đổi Laplace là L [ f (t )] F (s) thì:
F ( s)
L f (t )dt
0 s
e. Định lý giá trị cuối:
Cho hàm f(t) có biến đổi Laplace là L [ f (t )] F (s) thì:
Thì lim f (t ) lim sF (s)
t s 0
Biến đổi Laplace của một số hàm cơ bản:
a. Hàm bậc thang đơn vị: (hàm nấc đơn vị)
u(t)
1 t0 1
u (t )
0 t 0
Ta có :
L u (t ) u (t ).e st dt (theo định nghĩa)
0
e st .dt (do biểu thức của u(t))
0
e st e s e 0
0
s s s
13
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
1
L u (t )
s
b. Hàm dirac: (hàm xung đơn vị)
0 t0
(t )
t0
(t)
(t ).dt 1
Ta có: L (t ) (t ).e st dt (theo định nghĩa)
0
0
(t ).e
st
= dt
0
0
(t ).e 0 dt 1
0
Vậy L (t ) 1
c. Hàm dốc đơn vị: (RAMP)
f(t)
t t0
r (t ) t.u (t ) 1
0 t 0
t
1
Cách 1: dùng định nghĩa
L f (t ) f (t ).e
st
dt t.e st dt
0 0
t. e st e st 1
2 2
s s 0 s
1
Vậy: L t.u (t ) 2
s
Cách 2: dùng tính chất ảnh của tích phân
Ta có: r (t ) t.u (t ) u (t ) dt
0
1
Mặt khác: L u (t )
s
Nên theo tính chất của tích phân ta có:
14
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
t L u (t ) 1
L r (t ) L u (t )dt 2
0 s s
Dùng tính chất ảnh của tích phân có thể dễ dàng chứng minh đƣợc:
n!
L t n u (t ) n 1
s
d. Hàm mũ:
f(t)
e at t0
f (t ) e at .u (t ) 1
0 t 0
t
Ta có: L e at .u (t ) e at .e st .dt ( theo định nghĩa)
0
e ( s a )t 1
e ( s a )t
.dt
0 s a 0 sa
Vậy:
L e at .u (t ) 1
sa
e. Hàm sin:
f(t)
1
sin t t0
t
f (t ) (sin t ).u (t )
0 t 0
Áp dụng công thức Euler:
e jt e jt
sin t
2j
e jt e jt st 1 1 1
Ta có: L (sin t )u (t ) 0 2 j .e .dt 2 j s j s j s 2 2
Vậy: L (sin t )u (t ) 2
s 2
2.1.2. HÀM TRUYỀN ĐẠT
15
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Định nghĩa:
c(t) r(t)
Hệ thống tự động
Ngõ vào Ngõ ra
Quan hệ ngõ vào – ngõ ra của mọi hệ thống tuyến tính liên tục đều có thể mô tả bởi
phƣơng trình vi phân:
d n c(t ) d n 1c(t ) dc(t )
a0 n
a 1 n 1
... a n 1 a n c(t )
dt dt dt
(2.1)
d m r (t ) d m1 r (t ) dr (t )
b0 m
b 1 m 1
... b1m1 bm r (t )
dt dt dt
n m, n gọi là bậc của hệ thống
Nhận xét: Khảo sát hệ thống dựa vào phƣơng trình vi phân (2.1) rất là khó
khăn. Một thí dụ đơn giản là giả sử ta biết tất cả các thông số của hệ thống và biết
tín hiệu vào, muốn tìm đáp ứng của hệ thống ta phải giải phƣơng trình vi phân cấp
n, một công việc không dễ dàng chút nào.
Cần một biểu diễn toán học khác giúp cho việc nghiên cứu hệ thống tự động dễ
dàng hơn. Nhờ phép biến đổi Laplace, ta có thể thực hiện đƣợc điều này.
Giả sử điều kiện đầu bằng 0, để ý rằng:
- L c(t ) C (s)
dc(t )
- L sC( s) ( tính chất ảnh của đạo hàm)
dt
d 2 c(t ) d dc(t )
- L 2 L 2 ssC( s) s 2 C ( s)
dt dt dt
…..
d n c(t )
- L n s n C ( s)
dt
Đối với r(t) ta cũng có các biểu thức tƣơng tự
Biến đổi Laplace hai vế phƣơng trình (2.1) ta đƣợc:
d n c(t ) d n 1c(t ) dc(t )
L a 0 n
a 1 n 1
... a n 1 a n c(t )
dt dt dt
d m r (t ) d m 1 r (t ) dr (t )
L b0 m
b 1 m 1
... b1m1 bm r (t )
dt dt dt
Áp dụng tính chất tuyến tính và nhận xét ở trên ta đƣợc:
a0 s n C ( s) a1 s n1C ( s) ... a n1 sC( s) a n C ( s)
b0 s m R( s) b1 s m1 R( s) ... bm1 sR( s) bm R( s)
a0 s n a1 s n1 ... a n1 s a n C ( s)
b s
0
m
b1 s m1 ... bm1 s bm R( s)
16
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
C ( s) b0 s m b1 s m1 ... bm1 s bm
Lập tỉ số:
R( s) a0 s n a1 s n1 ... a n1 s a n
C ( s) b0 s m b1 s m1 ... bm1 s bm
Đặt: G( s) (2.2)
R( s) a0 s n a1 s n 1 ... a n 1 s a n
G(s) gọi là hàm truyền (transfer function) của hệ thống.
Định nghĩa: Hàm truyền của một hệ thống là tỉ số giữa biến đổi Laplace của tín hiệu
ra và biến đổi Laplace của tín hiệu vào khi điều kiện đầu bằng 0.
Chú ý:
- Mặc dù hàm truyền đƣợc định nghĩa là tỉ số giữa biến đổi Laplace của tín hiệu ra
và biến đổi Laplace của tín hiệu vào nhƣng hàm truyền không phụ thuộc vào tín hiệu
ra và tín hiệu vào mà chỉ phụ thuộc vào cấu trúc và thông số của hệ thống (để ý vế
phải của biểu thức (2.2) chỉ phụ thuộc vào cấu trúc và thông số của hệ thống).
- Vì hàm truyền chỉ phụ thuộc vào cấu trúc và thông số của hệ thống nên rõ ràng ta
có thể dùng hàm truyền để mô tả hệ thống. Nói cách khác chỉ dựa vào hàm truyền ta có
thể đánh giá đƣợc đặc tính động của hệ thống.
- Việc nghiên cứu hệ thống tự động dựa vào hàm truyền (phân thức đại số, biểu thức
(2.2) dễ dàng hơn dựa vào phƣơng trình vi phân (2.1)
Hàm truyền đạt của các khâu hiệu chỉnh thụ động
a. Mạch tích phân bậc 1
Áp dụng công thức phân áp ta có:
R ZC
V0 ( s) Vi ( S )
R ZC
C 1
vi Lập tỉ số và chú ý , ta đƣợc:
ZC
vo Cs
V ( s) 1 / Cs 1
G( s) 0
Vi ( s) R 1 / Cs RCs 1
b. Mạch vi phân bậc 1
C Áp dụng công thức phân áp ta có:
R
V0 ( s) Vi ( S )
R R ZC
1
vi vo Lập tỉ số và chú ý , ta đƣợc:
ZC
Cs
V ( s) R RCs
G( s) 0
Vi ( s) R 1 / Cs RCs 1
c. Khâu hiệu chỉnh sớm pha
17
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Áp dụng công thức phân áp ta có:
R2
C V0 ( s) Vi ( S )
Z R2
V ( s) R2
G( s) o
Vi ( s) Z R2
R1
vi R2 vo R1
1
Mà: Z R1 //(1 / Cs ) Cs R1
1 R1Cs
R1
Cs
R2 R2 ( R1Cs 1) R2 ( R1Cs 1)
G(s)
R1 R1 R2 ( R1Cs 1) R1 R2 R2 R1Cs
R1Cs R2
R2 R1Cs 1
G ( s)
R1 R2 R2 R1C
s 1
R1 R2
R2 R RC R R2
Đặt K C ;T 2 1 ; 1 ( 1)
R1 R2 R1 R2 R2
T R1C
Thay vào biểu thức trên ta đƣợc:
Ts 1
G( s) K C
Ts 1
Khâu hiệu chỉnh trên có hàm truyền có dạng trên với >1 đƣợc gọi là khâu hiệu
chỉnh sớm pha.
d. Khâu hiệu chỉnh trễ pha
Áp dụng công thức phân áp ta có:
Z V0 ( s)
Z
Vi ( S )
R1 R1 Z
vi vo V ( s) Z
G( s) o
Vi ( s) R1 Z
C Mà :
1 R Cs 1
Z R2 2
Cs Cs
Nên:
18
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
R2 Cs 1
Cs R2 Cs 1 R2 Cs 1
G( s)
R Cs 1 R1Cs R2 Cs 1 ( R1 R2 )Cs 1
R1 2
Cs
R2
Đặt: T ( R1 R2 )C ; ( 1)
R1 R2
T R2 C
Thay vào biểu thức trên, ta đƣợc:
Ts 1
G( s)
Ts 1
Khâu hiệu chỉnh có hàm truyền trên hay có dạng tổng quát hơn là:
Ts 1
G( s) K C
Ts 1
Với 1 đƣợc gọi là khâu hiệu chỉnh trễ pha
Hàm truyền đạt của các khâu hiệu chỉnh tích cực
a. Khâu tỉ lệ P: (Proportional)
Dễ thấy:
R2 Vo ( s) R
G( s) 2
Vi ( s) R1
- Đặt:
R1 KP
R2
vi R1
+ vo Ta đƣợc hàm truyền:
G( s) K P
Tại sao gọi là khâu tỉ lệ?
Ta có:
Vo ( s)
KP Vo ( s) K PVi ( s) vo (t ) K P vi (t )
Vi ( s)
Từ kết quả trên ta thấy tín hiệu ra tỉ lệ với tín hiệu vào, vì lý do đó mà khâu hiệu
chỉnh trên đƣợc gọi là khâu tỉ lệ.
b. Khâu tích phân tỉ lệ PI: (Proportional Integral)
19
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Ta có:
Z 1
R2 R2
C Vo ( s) Z Cs
G( s)
Vi ( s) R1 R1
R 1
- G( s) 2
R1 R1Cs
R1 1
vi vo R
Đặt: K P 2 K I
+ R1 R1C
Ta đƣợc hàm truyền:
KI
G( s) K P
s
Tại sao gọi là khâu tích phân tỉ lệ?
V0 ( s) K
Ta có: G( s) K P I
Vi ( s) s
V ( s)
Vo ( s) K PVi ( s) K I i
s
t
Vo (t ) K PVi (t ) K I vi (t )dt
0
Từ kết quả trên ta thấy tín hiệu ra tỉ lệ với tín hiệu vào và tỉ lệ với tích phân của tín
hiệu vào, vì lý do đó mà khâu hiệu chỉnh trên đƣợc gọi là khâu tích phân tỉ lệ.
c. Khâu tích phân tỉ lệ PD: (Proportional Derivative)
Ta có:
R2 Vo ( s) R
G( s) 2
Vi ( s) Z
R1 R1
1
R1
- Z Cs
1 R1Cs 1
R1
vi Cs
vo R ( R Cs 1) R
G( s) 2 1 2 R2 Cs
Z C + R1 R1
R
Đặt: K P 2 K D R2 C
R1
Ta đƣợc hàm truyền:
G( s ) K P K D s
Tại sao gọi là khâu vi phân tỉ lệ?
Ta có:
20
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
V0 ( s)
G( s) K P K D s
Vi ( s)
Vo (s) K PVi (s) K D sVi (s)
dvi (t )
vo (t ) K P vi (t ) K D
dt
Từ kết quả trên ta thấy tín hiệu ra tỉ lệ với tín hiệu vào và tỉ lệ với vi phân của tín
hiệu vào, vì lý do đó mà khâu hiệu chỉnh trên đƣợc gọi là khâu vi phân tỉ lệ.
d. Khâu tích phân tỉ lệ PID: (Proportional Integral Derivative)
Ta có:
Z2 R2 C2 Vo ( s) Z
G( s) 2
Vi ( s) Z1
R1 1
Z1 R1
R1
- Z1 Cs
- 1 R1Cs 1
R1
vi Cs
vo - Z 2 R2
1 R C s 1
2 2
C1 + Cs C2 s
( R1C1 s 1)( R2 C 2 s 1)
G( s)
R1C 2 s
R1C1 R2 C 2 1
G( s) R2 C1 s
R1C 2 R1C 2 s
R1C1 R2 C 2 1
Đặt: K P ; KI K D R2 C1
R1C 2 R1C 2
Ta đƣợc hàm truyền:
KI
G( s) K P KDs
s
Ta có:
V0 ( s) K
G( s) K P I K D s
Vi ( s) s
Vi ( s)
Vo ( s) K PVi ( s) K I K D sVi ( s)
s
21
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
t
dvi (t )
vo (t ) K P vi (t ) K I vi(t )dt K D
0
dt
Từ kết quả trên ta thấy tín hiệu ra tỉ lệ với tín hiệu vào, tỉ lệ với tích phân và vi
phân của tín hiệu vào, vì lý do đó mà khâu hiệu chỉnh trên đƣợc gọi là khâu vi tích phân
tỉ lệ.
Hàm truyền đạt của một số đối tƣợng điều khiển:
a. Động cơ DC
- Lư: điện cảm phần ứng - : tốc độ động cơ
- Rư: điện trở phần ứng - Mt: moment tải
- Uư: điện áp phần ứng - J: moment quán tính
- Eư: sức phản điện động
Theo định luật Kirchoff ta có:
Uư(t) = i ư(t). Rư + Lư di (t) + Eư(t) (1)
dt
Trong đó: Eư(t) = K (t ) (2)
K: hệ số : từ thông kích từ
Phƣơng trình cân bằng moment trên trục động cơ:
d (t )
M (t ) M t (t ) B (t ) J (3)
dt
Trong đó:
M (t ) K i ư(t) : moment của động cơ (4)
Biến đổi Laplace (1), (2), (3), (4) ta đƣợc:
Uư(s) = Iư(s). Rư + Lư s Iư(s) + Eư(s) (5)
Eư(s) = K (s) (6)
22
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
M (s) M t (s) B (s) Js (s) (7)
M (s) K I ư(s) (8)
Lu
Ta đặt: Tu là hằng số thời gian điện từ của động cơ
Ru
J
TC là hằng số thời gian điện cơ của động cơ
B
Ta có thể viết lại (5) và (7) nhƣ sau:
(5) Uƣ(s) – Eƣ(s)= Rƣu(1+Tus)Iƣ(s)
U u ( s ) Eu ( s )
Iƣ = (5’)
Ru (1 Tu s)
(7) M(s) – Mt(s) = B(1+TCs) (s)
M ( s) M t ( s)
(s) = (7’)
B(1 TC s)
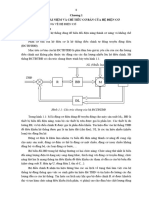
Từ (5’), (6), (7’), và (8) ta có thể biểu diễn động cơ DC bằng sơ đồ khối:
Hàm truyền của động cơ:
Uƣ(s) Mt(s)
1 / Ru 1/ B (s)
1 sTu K 1 sTC
Eƣ(s)
K
Hàm truyền động cơ:
( s)
.....
U u ( s)
b. Lò nhiệt
Công suất P Nhiệt độ t0
Lò nhiệt
Hàm truyền của lò nhiệt được xác định bằng phương pháp thực nghiệm
23
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Cấp nhiệt tối đa cho lò (công suất vào P = 100%) nhiệt độ lò tăng dần. Sau một thời
gian nhiệt độ lò đạt đến giá trị bão hoà. Đặc tính theo thời gian có thể biểu diễn nhƣ hình
vẽ.
0 0
C C
t (sec) t (sec)
T1 T2 T1 T2
K
Đặc tính chính xác của lò nhiệt Đặc tính gần đúng của lò nhiệt
Ta xác định hàm truyền gần đúng của lò nhiệt dùng định nghĩa:
C ( s)
G( s)
R( s)
Tín hiệu vào là nấc đơn vị ( P = 100%)
1
biến đổi Laplace của tín hiệu vào là: R( s )
s
Tín hiệu ra gần đúng (hình vẽ bên phải) chính là hàm:
c(t ) f (t T1 )
Trong đó: f (t ) K (1 e t / T )2
K
Dễ dàng chứng minh đƣợc: F ( s)
s(1 T2 s)
Ke T1
Nên áp dụng định lý chậm trễ ta đƣợc: C ( s)
s(1 T2 s)
Ke T1s
Suy ra: G ( s)
1 T2 s
2.3. SƠ ĐỒ KHỐI
24
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
2.3.1. Khái niệm sơ đồ khối
Sơ đồ khối của một hệ thống là hình vẽ mô tả chức năng của các phần tử và sự tác
động qua lại giữa các phần tử trong hệ thống.
Các thành phần của sơ đồ khối: 3 thành phần
Khối chức năng:
R(s) C(s)
G(s)
C(s) = R(s).G(s)
Tín hiệu ra của khối chức năng bằng tích tín hiệu vào và hàm truyền.
Điểm rẽ nhánh:
x x
-x
Tại điểm rẽ nhánh mọi tín hiệu đều bằng nhau
Bộ tổng:
x-y
x
+
-
y
Tín hiệu ra của bộ tổng bằng tổng đại số của các tín hiệu vào
Biến đổi tƣơng đƣơng sơ đồ khối: hai sơ đồ khối đƣợc gọi là tƣơng đƣơng nếu
hai sơ đồ khối đó có quan hệ giữa các tín hiệu vào và tín hiệu ra nhƣ nhau
2.3.2. Hàm truyền đạt của hệ thống biểu diễn bằng sơ đồ khối
a. Hệ thống nối tiếp:
C2(s) C (s)
R(s) R2(s)
G1(s) G2(s) Gn(s)
Rn(s) Cn(s)
R1(s) C1(s)
Hàm truyền của hệ thống nối tiếp:
25
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
C ( s) C n ( s ) C1 ( s).C n ( s) C ( s) C ( s).C n ( s)
G( s) G1 ( s). n G1 ( s). 2
R( s) R1 ( s) R1 ( s).C1 ( s) R2 ( s ) R2 ( s).C 2 ( s)
C n ( s)
G1 ( s).G2 ( s) ... G1 ( s).G2 ( s)...Gn ( s)
R3 ( s)
n
Vậy: G( s) Gi ( s)
i
b. Hệ thống song song:
R1(s) C1(s)
G1(s)
R(s) C2(s) C (s)
R2(s)
G2(s)
Rn(s) Cn(s)
Gn(s)
Hàm truyền của hệ thống song:
C ( s) C1 ( s) C 2 ( s) ... C n ( s) C1 ( s) C 2 ( s) C ( s)
G( s) ... n
R( s ) R( s ) R1 ( s) R2 ( s) Rn ( s )
n
Vậy: G( s) Gi ( s)
i 1
Chú ý: Trong công thức tổng là tổng đại số
c. Hệ hồi tiếp 1 vòng:
Hệ hồi tiếp âm:
R(s) E(s) C(s)
+ G (s)
-
Cht(s)
H(s)
Hàm truyền hệ thống hồi tiếp (hệ thống kín)
26
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
C ( s)
Gk ( s )
R( s )
Ta có:
- C(s) = E(s).G(s)
- R(s) = E(s) + Cht(s) (do E(s)=R(s) - Cht(s))
= E(s) + C(s).H(s) (do Ch (s) = C(s).H(s))
= E(s) + E(s).G(s).H(s) (do C(s) = E(s).G(s))
Lập tỉ số giữa C(s) và R(s) ta đƣợc:
G( s)
Gk ( s )
1 G ( s).H ( s)
Hệ thống hồi tiếp âm đơn vị (H(s) = 1)
R(s) G( s)
Gk ( s )
E(s) C(s) 1 G( s)
+ G (s)
-
Cht(s)
Hệ hồi tiếp dƣơng: chứng minh tƣơng tự, dễ dàng suy ra:
G( s)
Gk ( s )
1 G( s).H ( s)
R(s) E(s) C(s)
+ G (s)
+
Cht(s)
H(s)
d. Hệ hồi tiếp nhiều vòng:
- Đối với các hệ thống phức tạp gồm nhiều vòng hồi tiếp, ta thực hiện các phép
biến đổi sơ đồ khối để làm xuất hiện các dạng đơn giản (nối tiếp, song song, hồi
tiếp 1 vòng) và tính hàm truyền tƣơng đƣơng theo thứ tự từ trong ra ngoài.
Hai sơ đồ khối được gọi là tương đương nếu hai sơ đồ khối đó có quan hệ giữa
các tín hiệu vào và ra như nhau.
27
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
- Các phép biến đổi sơ đồ khối thƣờng dùng là:
Chuyển điểm rẽ nhánh từ trước ra phía sau 1 khối:
x1
x3
G(s)
x1
x3
G(s) x2
x2 1/G(s)
x2 = x 1 x3 = x 1 G
x3 = x 1 G x2 = x3.(1/G) = x1G.(1/G) = x1
Chuyển điểm rẽ nhánh từ phía sau ra phía trước 1 khối:
x1 x3 x1 x3
G(s) G(s)
x2 x2
G(s)
x3 = x 1 G x3 = x 1 G
x2 = x 3 = x 1 G x2 = x1 G
Chuyển bộ tổng từ phía trước ra phía sau 1 khối:
x1 x2 x2
+- G(s) G(s) +
x1 -
x3
x3
G(s)
x2 = ( x1 - x3).G x2 = x1G – x3G = (x1 – x3) G
Chuyển bộ tổng từ phía sau ra phía trước 1 khối:
28
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
x1 x2 x2
G(s) + + G(s)
-
x1 -
x3
x3
1/G(s)
x2 = x1.G - x3 x2 = [x1 – x3(1/G)].G = x1 G – x3
Chuyển vị trí hai bộ tổng:
x1 x4 x4
+ + + +
- +
x1 + +
x2 x3 x3 x2
x4 = ( x1 – x2 ) + x3 x4 = ( x1 + x3 ) – x2
Tách 1 tổng thành 2 bộ tổng:
x3 x3
x1 x1 x4
+ x4 + ++
+ +
-
x2 x2
x4 = x1 – x2 + x3 x4 = ( x1 – x2 ) + x3
Chú ý: Khi thực hiện phép biến đổi sơ đồ khối để tính hàm truyền tƣơng đƣơng của hệ
thống, sinh viên thƣờng mắc các sai sót sau:
Chuyển vị trí điểm rẽ nhánh và bộ tổng:
Chuyển vị trí hai bộ tổng khi giữa h.ai bộ tổng đó có điểm rẽ nhánh
2.3.3. Một số thí dụ tính hàm truyền tương đương của hệ thống:
Thí dụ 1: Tính hàm truyền tƣơng đƣơng của hệ thống có sơ đồ khối nhƣ sau:
29
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Giải: Biến đổi tƣơng đƣơng sơ đồ khối nhƣ sau:
- Chuyển vị trí hai bộ tổng và , GA(s)=[G3(s)//G4(s)]:
- GB(s)[G1(s)//hàm truyền đơn vị],
- GC(s) = vòng hồi tiếp [G2(s), GA(s)]:
Ta có:
- GA(s) = G3(s) – G4(s)
- GB(s) = 1+ G1(s)
G2 ( s ) G2 ( s )
GC ( s)
- 1 G2 ( s).G A ( s) 1 G2 ( s).[G3 ( s) G4 ( s)]
Hàm truyền tƣơng đƣơng của hệ thống:
G(s) GB (s).GC (s)
[1 G1 ( s)].G2 ( s)
GC ( s)
1 G2 ( s).[G3 ( s) G4 ( s)]
Thí dụ 2: Tính hàm truyền tƣơng đƣơng của hệ thống có sơ đồ khối nhƣ sau:
30
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Giải: Biến đổi tƣơng đƣơng sơ đồ khối nhƣ sau:
- Chuyển vị trí hai bộ tổng và
Chuyển điểm rẽ nhánh ra sau G2(s)
- GB(s) = vòng hồi tiếp [G2(s), H2(s)]
GC(s) = [GA(s)// hàm truyền đơn vị]
- GD(s) = [GB(s) nối tiếp GC(s) nối tiếp G3(s)]
- GE(s) = vòng hồi tiếp [ GD(s). H3(s)]
Ta có:
H1
- G1
G2
G2
- GB
1 G2 H 2
H 1 G2 H 1
- GC 1 G A 1
G2 G2
G2 G2 H 1 G G G3 H 1
- GD GB .GC .G3 G3 2 3
1 G2 H 2 G2 1 G2 H 2
G 2 G3 G3 H 1
GD 1 G2 H 2
- GE
1 GD H 3 G G G3 H 1
1 2 3 H3
1 G2 H 2
G2 G3 G3 H 1
GE
1 G2 H 2 G2 G3 H 3 G3 H 1 H 3
31
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Vậy hàm truyền tƣơng đƣơng của hệ thống là:
G 2 G3 G3 H 1
G1 .
G1G E 1 G 2 H 2 G 2 G3 H 3 G3 H 1 H 3
G
1 G1G E G 2 G3 G3 H 1
1 G1 .
1 G 2 H 2 G 2 H 3 G3 H 3 G3 H 1
G1G2 G3 G1G3 H 1
G
1 G2 H 2 G2 G3 H 3 G3 H 1 H 3 G1G2 G3 G1G3 H 1
Thí dụ 3: Tính hàm truyền tƣơng đƣơng của hệ thống có sơ đồ khối nhƣ sau:
Gợi ý: Biến đổi tƣơng đƣơng sơ đồ khối nhƣ sau:
- Chuyển bộ tổng ra trƣớc G1(s), sau đó đổi vị trí 2 bộ tổng và .
Chuyển điểm rẽ nhánh ra sau G2(s)
2.4. GRAPH TÍN HIỆU
Để biểu diễn hệ thống tự động, ngoài phƣơng pháp sử dụng sơ đồ khối, ta còn có
thể sử dụng phƣơng pháp graph tín hiệu. Hãy so sánh hai hình vẽ dƣới đây:
R(s) C(s)
+ E(s) R(s) 1 E(s) G(s) C(s)
- G (s)
H(s)
-H(s)
Định nghĩa:
Graph tín hiệu là một mạng gồm các nút và các nhánh.
- Nút: là một điểm biểu diễn một biến hay tín hiệu trong hệ thống.
32
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
- Nhánh: là đƣờng nối trực tiếp 2 nút, trên mỗi nhánh có ghi mũi tên chỉ chiều
truyền của tín hiệu và có ghi hàm truyền cho biết mối quan hệ giữa tín hiệu ở 2 nút.
- Nút nguồn: là nút chỉ có các nhánh hƣớng ra.
- Nút đích: là nhánh chỉ có các nhánh hƣớng vào.
- Nút hỗn hợp: là nút có cả nhánh ra và các nhánh vào.
Tại nút hỗn hợp, tất cả các tín hiệu ra đều bằng nhau và bằng tổng đại số của tín
hiệu vào.
- Đường tiến: là đƣờng gồm các nhánh liên tiếp có cùng hƣớng các tín hiệu đi từ
nút nguồn đến nút đích và chỉ qua mỗi nút một lần.
Độ lợi của một đƣờng tiến là tích của các hàm truyền của các nhánh trên đƣờng
tiến đó.
- Vòng kín: là một đƣờng khép kín gồm các nhánh liên tiếp có cùng hƣớng tín
hiệu và chỉ qua mỗi nút một lần.
Độ lợi của một vòng kín: là tích của các hàm truyền của các nhánh trên vòng kín
đó.
Công thức Mason:
Hàm truyền tƣơng đƣơng của hệ thống tự động biểu diễn bằng graph tín hiệu có thể
đƣợc tính theo công thức:
1
G k Pk
k
Trong công thức trên:
Pk: là độ lợi của đƣờng tiến thứ k.
: là định thức của graph tín hiệu. đƣợc tính bằng công thức sau:
1 Li Li L j Li L j Lm ...
i i, j i , j ,m
* L : tổng các độ lợi vòng của các vòng kín trong graph tín hiệu.
i
i
* L L : tổng các tích độ lợi vòng của 2 vòng rời nhau.
i j
i, j
* Li L j Lm : tổng các tích độ lợi vòng của 3 vòng rời nhau.
i , j ,m
k: là định thức con của graph tín hiệu. k đƣợc tính suy ra từ bằng cách bỏ
đi các vòng kín có dính tới đƣờng tiến Pk.
Chú ý:
*..
rời nhau” = không có nút nào chung.
* ..dính” = có ít nhất nút chung.
Trong trƣờng hợp hệ thống đƣợc cho dƣới dạng sơ đồ khối, muốn áp dụng công
thức Mason, trƣớc tiên ta phải chuyển sơ đồ khối sang dạng graph tín hiệu.
Khi chuyển từ sơ đồ khối sang graph tín hiệu cần chú ý:
- Có thể góp 2 bộ tổng liền nhau thành 1 nút.
- Có thể góp 1 bộ tổng và 1 điểm rẽ nhánh liền sau nó thành một nút.
33
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
- Không thể gộp 1 điểm rẽ nhánh và 1 bộ tổng liền sau nó thành 1 nút.
Một số thí dụ tính hàm truyền tƣơng đƣơng dùng phƣơng pháp graph tín
hiệu:
Thí dụ 1: Cho hệ thống mô tả bởi graph tín hiệu nhƣ sau:
G6(s)
G7(s)
R(s) G1(s) G2(s) G4(s) G5(s) C(s)
G3(s) 1
-H1 1
-H2
Tính hàm truyền tƣơng đƣơng của hệ thống.
Giải:
- Các đƣờng tiến:
P1 = G1G2G3G4G5
P2 = G1G6G4G5
P3 = G1G2G7
- Các vòng kín:
L1 = -G4H1
L2 = -G2G7H2
L3 = -G6G4G5H2
L4 = -G2G3G4G5H2
- Định thức của graph:
= 1- (L1+L2+L3+L4)+L1L2
- Các định thức con:
1= 1
2= 1
3= 1-L1
Hàm truyền tƣơng đƣơng của hệ là:
1
G ( P1 1 P2 2 P3 3 )
G1G2 G3G4 G5 G1G6 G4 G5 G1G2 G7 (1 G4 H 1 )
G
1 G4 H 1 G2 G7 H 2 G6 G4 G5 H 2 G2 G3G4 G5 H 2 G4 H 1G2 G7 H 2
Thí dụ 2: Cho hệ thống sơ đồ khối nhƣ sau (sơ đồ khối ở thí dụ 2, mục 3.1)
34
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
H1(S)
1 6 C(S)
R(S) + 2 3 5 7
- G1(S) + + G2(S) ++ G3(S)
- -
4
H2(S)
H3(S)
Tính hàm truyền tƣơng đƣơng của hệ thống.
Giải:
Graph tín hiệu tƣơng đƣơng:
//////////////////////////////////////////////////////
35
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
- Các đƣờng tiến:
P1 = G1G2G3
P2 = G1H1G3
- Các vòng kín:
L1 = -G2H2
L2 = -G2G3H3
L3 = - G1G2G3
L4 = - G3H1H3
L5 = - G1G3H1
- Định thức của graph:
= 1- (L1+L2+L3+L4+L4+L5)
- Các định thức con:
1= 1
2= 1
Hàm truyền tƣơng đƣơng của hệ là:
1
G ( P1 1 P2 2 )
G1G2 G3 5 G1G3 H 1
+-
G
1 G2 H 2 G2 G3 H 3 G1G2 G3 G3 H 1 H 3 G1G3 H 1
2.4. PHƢƠNG PHÁP BIẾN TRẠNG THÁI
2.4.1. Khái niệm
Trạng thái: Trạng thái của một hệ thống là một tập hợp nhỏ nhất các biến (gọi là
biến trạng thái) mà nếu biết giá trị của các biến này tại thời điểm to và các tín
hiệu vào ở các thời điểm t > to ta hoàn toàn có thể xác định đƣợc đáp ứng của hệ
thống tại mọi thời điểm t t 0 .
Hệ thống bậc n có n biến trạng thái
Các biến trạng thái có thể chọn là biến vật lý hoặc không phải là biến vật lý.
Thí dụ: Động cơ DC là hệ bậc 2, có hai biến trạng thái có thể chọn là tốc độ động cơ và
dòng điện phần ứng (biến vật lý). Tuy nhiên ta cũng có thể chọn 2 biến trạng thái khác.
Vector trạng thái: n biến trạng thái hợp thành vector cột, ký hiệu
x [ x1 x2 ... xn ]T
gọi là vector trạng thái sử dụng các biến trạng thái, ta có thể chuyển phƣơng trình vi phân
bậc n mô tả hệ thống thành n phƣơng trình vi phân bậc nhất.
Phƣơng pháp mô tả hệ thống bằng cách sử dụng các biến trạng thái gọi là phƣơng
pháp biến trạng thái.
36
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Tại sao lại sử dụng phương pháp biến trạng thái?
- Quan hệ ngõ vào ngõ ra của hệ thống có thể mô tả bằng phƣơng trình vi phân bậc
n. Nghiên cứu hệ thống dựa trên phƣơng trình vi phân bậc n rất khó khăn cần mô tả
toán học khác giúp nghiên cứu hệ thống dễ dàng hơn.
- PP hàm truyền chuyển quan hệ phƣơng trình vi phân cấp n thành phân thức đại số
nhờ phép biến đổi Laplace. Nghiên cứu hệ thống mô tả bằng hàm truyền thuận lợi hơn,
tuy nhiên hàm truyền có một khuyết điểm:
* Chỉ áp dụng đƣợc khi điều kiện đầu bằng 0.
* Chỉ áp dụng cho hệ tuyến tính bất biến một ngõ vào, một ngõ ra.
* Nghiên cứu hệ thống trong miền tần số.
- PP biến trạng thái chuyển phƣơng trình vi phân bậc n thành n phƣơng trình vi phân
bậc 1 bằng cách đặt n biến trạng thái. PP biến trạng thái khắc phục đƣợc các khuyết điểm
của PP hàm truyền.
Hệ phƣơng trình biến trạng thái có dạng nhƣ sau:
x1 (t ) a11 a12 a1n x1 (t ) b1
x 2 (t ) a 21 a 22 a 2 n x 2 (t ) b2
r (t )
x n (t ) a n1 a n 2 a nn x n (t ) bn
x1 (t )
x (t )
c(t ) d1 d 2 d n 2
x n (t )
Đặt:
a11 a12 a1n b1
a a 22 a 2 n b
A 21
B 2 D d1 d2 dn
a n1 a n 2 a nm bn
Ta có thể viết lại hệ phƣơng trình biến trạng thái dƣới dạng:
x (t ) Ax (t ) Br (t )
c(t ) Dx(t )
Chú ý:
Nếu A là ma trận thƣờng, ta gọi là (*) là hệ phƣơng trình biến trạng thái dạng thƣờng.
Nếu A là ma trận chéo, ta gọi (*) là hệ phƣơng trình biến trạng thái dạng chính tắc.
2.5.2. Cách thành lập hệ phƣơng trình biến trạng thái ở dạng thƣờng
37
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
A. Vế phải của phương trình vi phân mô tả hệ thống không có chứa đạo hàm
của tín hiệu vào:
Cho hệ thống mô tả bởi phƣơng trình vi phân;
d n c(t ) d n1c(t ) dc(t )
a0 n
a1 n 1
... a n1 a n c(t ) b0 r (t ) (*)
dt dt dt n
Đặt n biến trạng thái nhƣ sau:
x1 (t ) c(t )
x 2 (t ) x1 (t ) x 2 (t ) c(t )
x3 (t ) x 2 (t ) x3 (t ) c(t )
d n 1c(t ) d n c(t )
x n (t ) x n 1 (t ) x n (t )
x (t )
dt n 1
n
dt n
Cách đặt biến trạng thái:
- Biến đầu tiên bằng tín hiệu ra: x1 (t ) c(t )
Từ biến trạng thái x2 (t ) đến xn (t ) đặt theo qui tắc: biến sau bằng đạo hàm của biến
____
trƣớc: xi (t ) x i 1 (t ), (i 2, n)
Thay các biến trạng thái vào phƣơng trình (*) ta đƣợc:
a0 x n (t ) a1 x n (t ) ... an1 x2 (t ) an x1 (t ) b0 r (t )
Kết hợp phƣơng trình với quan hệ của các biến trạng thái ta đƣợc hệ phƣơng trình sau:
x (t ) x (t )
1 2
x 2 (t ) x3 (t )
x (t ) x (t )
n 1 n
an a n 1 a2 a1 b0
x n (t ) a x1 (t ) a x1 (t ) ... a x n 1 (t ) a x n (t ) a r (t )
0 0 0 0 0
0 0 x
1
1 0 0
x1
x 0 0 1 0 x 0
2 2
Viết lại dƣới dạng ma trận:
x n 1 0 0 0 1 x 0
an a n 1 an2 a n 1 b
x n a 1 x 0
0 a0 a0 a 0 n a0
38
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
x1
x
2
Đáp ứng của hệ thống: c(t ) x1 (t ) 1 0 0 0
x n 1
x n
Vậy hệ phƣơng trình biến trạng thái mô tả hệ thống là:
x (t ) Ax(t ) Br (t )
c(t ) Dx(t )
Với:
0 1 0 0 0
x1
x 0 0 1 0 0
2
x A B =
D = 1 0 0 0
x n 1 0 0 0 1 0
x n a n
a n 1
an2
a1 b0
a 0 a0 a0 a 0 a 0
Thí dụ 1: Cho hệ thống điều khiển có quan hệ tín hiệu vào – tín hiệu ra mô tả bởi phƣơng
trình vi phân sau:
2c(t ) 5c(t ) 6c(t ) 10c(t ) r (t ) (1)
Hãy viết hệ phƣơng trình biến trạng thái mô tả hệ thống.
Giải:
Đặt các biến trạng thái nhƣ sau:
x1 (t ) c(t ) (2)
x 2 (t ) x1 (t ) (3) x 2 (t ) c(t ) (5)
x3 (t ) x 2 (t ) (4) x3 (t ) c(t ) (6) x 3 (t ) c(t ) (7 )
Thay (2), (5), (6), (7) vào phƣơng trình (1) ta đƣợc:
2 x3 5x3 6 x2 10 x1 r (t ) (8)
Kết hợp (3), (4) và (8) ta đƣợc hệ phƣơng trình:
x1 ( t ) x 2 ( t )
x 2 ( t ) x3 ( t )
x ( t ) 5 x ( t ) 3x ( t ) 2.5 x ( t ) 0.5r( t )
3 2 2 2
Đáp ứng của hệ thống: c(t ) x1 (t )
39
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Viết lại dƣới dạng ma trận:
x1 0 1 0 x1 0 x1
x 0 0 1 x 2 0 r c(t ) 1 0 0 x 2
2
x 3 5 3 2.5 x3 0.5 x3
Thí dụ 2: Cho hệ thống tự động có sơ đồ khối:
R(s) C(s)
10
+
- s( s 1)( s 3)
Hãy thành lập hệ phƣơng trình biến trạng thái mô tả hệ thống.
Giải:
Hàm truyền của hệ thống kín:
10
G( s) s( s 1)( s 3) 10
Gk ( s)
1 G( s) 10 s( s 1)( s 3) 10
1
s( s 1)( s 3)
C (s) 10 10
3
R( s) s( s 1)( s 3) 10 s 4s 3s 10
2
( s 3 4s 2 3s 10)C ( s) 10 R( s)
Phƣơng trình vi phân mô tả hệ thống:
c(t ) 4c(t ) 3c(t ) 10c(t ) 10r (t )
Đặt các biến trạng thái nhƣ sau:
x1 (t ) c(t )
x 2 (t ) x1 (t )
x3 (t ) x 2 (t )
Theo lý thuyết, hệ phƣơng trình biến trạng thái mô tả hệ thống có dạng:
x1 0 1 0 x1 0
x 0 0 1 x 2 0 r
2 a a a1 b
x 3 3 2
3
x 0
a0 a0 a0 a0
Thay thông số của hệ vào phƣơng trình trên, ta đƣợc:
40
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
x1 0 1 0 x1 0
x 0 0 1 x 2 0 r
2
x 3 10 3 4 x3 10
- Đáp ứng của hệ thống
x1
c(t ) x1 (t ) 1 0 0 x 2
x3
B. Vế phải của phương trình vi phân mô tả hệ thống có chứa đạo hàm của tín
hiệu vào:
Cho hệ bậc 3 có phƣơng trình vi phân nhƣ sau:
d 3 c(t ) d 2 c(t ) dc(t ) d 2 r (t ) dr (t )
a0 3
a1 2
a 2 n
a 3 c (t ) b0 2
b1 b2 r (t ) (*)
dt dt dt dt dt
Đặt các biến trạng thái nhƣ sau:
x1 (t ) c(t ) (1)
x 2 (t ) x1 (t ) 1 r (t ) c(t ) 1 r (t ) (2)
x3 (t ) x 2 (t ) 2 r (t ) c(t ) 1 r(t ) 2 r (t ) (3)
Với cách đặt biến trạng thái nhƣ trên, ta có:
(2) c(t ) x 2 (t ) 1 r (t ) (4)
(3) c(t ) x3 (t ) 1 r(t ) 2 r (t ) (5)
(4) c(t ) x 3 (t ) 1r(t ) 2 r(t ) (6)
Thay (1),(4),(5),(6) vào phƣơng trình (*) ta đƣợc:
a0 [ x 3 (t ) 1r(t ) 2 r(t )] a1[ x3 (t ) 1r(t ) 2 r (t )]
a 2 [ x2 (t ) 1r (t )] a3 x1 (t ) b0 r(t ) b1r(t ) b2 r (t )
a 0 x 3 (t ) a0 1r(t ) a 0 2 r(t ) a1 x3 (t ) a1 1 r(t ) a1 2 r (t )
a 2 x 2 (t ) a 2 1 r (t ) a3 x1 (t ) b0 r(t ) b1 r(t ) b2 r (t )
a3 a a b a0 1
x 3 (t ) x1 (t ) 2 x 2 (t ) 1 x3 (t ) 0 r(t )
a0 a0 a0 a0
b1 a0 2 a1 1 b a1 2 a 2 1
r(t ) 2 r (t ) (7)
a0 a0
Chọn 1 , 2 sao cho đạo hàm của tín hiệu vào trong biểu thức (7) bị triệt tiêu:
41
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
b0 a0 1 0
b1 a0 2 a1 1 0
b2 a1 2 a 2 1
Đặt: 3
a0
Thay vào (7) ta đƣợc:
a3 a a
x3 (t ) x1 (t ) 2 x1 (t ) 1 x3 (t ) 3 r (t ) (8)
a0 a0 a0
Kết hợp (2),(3),và (8) ta đƣợc hệ phƣơng trình:
x1 ( t ) x 2 ( t ) 1 r( t )
x 2 ( t ) x3 ( t ) 2 r( t )
a3 a2 a
x 3 ( t ) x1 ( t ) x1 ( t ) 1 x1 ( t ) 3 r( t )
a0 a0 a0
Vậy hệ phƣơng trình biến trạng thái mô tả hệ thống là:
x1 0 1 0 x1 1
x 0 0 1 x 2 2 r
2 a a a
x 3 3 2 1 x3 3
a0 a0 a0
b0
1
a0
b1 a1 1
Trong đó: 1
a0
b a1 2 a 2 1
1 2
a0
x1
Đáp ứng ra của hệ thống: c(t ) x1 (t ) 1 0 0 x 2
x3
Thí dụ 1: Cho hệ thống tự động có sơ đồ khối:
42
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
R(s) C(s)
10
+
- s ( s 3)
10
( s 2)
Hãy thành lập hệ phƣơng trình biến trạng thái mô tả hệ thống.
Giải:
Hàm truyền của hệ thống kín:
10
G( s ) s( s 3 ) 10( s 2 )
Gk ( s )
1 G( s )H ( s ) 10. 1 s( s 3 )( s 2 ) 10
1
s( s 3 )( s 2 )
C ( s) 10( s 2) 10( s 2)
3
R( s) s( s 3)( s 2) 10 s 5s 2 6s 10
( s 3 5s 2 6s 10)C ( s) 10( s 2) R( s)
Phƣơng trình vi phân mô tả hệ thống:
c(t ) 5c(t ) 6c(t ) 10c(t ) 10r(t ) 20r (t )
Đặt các biến trạng thái nhƣ sau:
x1 (t ) c(t )
x 2 (t ) x1 (t ) 1 r (t )
x3 (t ) x 2 (t ) 2 r (t )
Theo lý thuyết, hệ phƣơng trình biến trạng thái mô tả hệ thống có dạng:
x1 0 1 0 x1 1
x 0 0 1 x 2 2 r
2 a a a
x 3 3 2 1 x3 3
a0 a0 a0
Trong đó:
43
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
b0 0
1 0
a 0 1
b1 a1 1 10 5 0
1 10
a0 1
b a1 2 a 2 1 20 5 10 6 0
1 2 30
a0 1
Thay thông số của hệ vào phƣơng trình trên, ta đƣợc:
x1 0 1 0 x1 0
x 0 0 1 x 2 10 r
2
x 3 10 6 5 x3 30
x1
- Đáp ứng của hệ thống: c(t ) x1 (t ) 1 0 0 x 2
x3
Thí dụ 2: Cho hệ thống tự động có hàm truyền:
C ( s) 3s 10
G( s) 2
R( s) s 3s 2
Hãy thành lập hệ phƣơng trình biến trạng thái mô tả hệ thống.
Giải:
Từ hàm truyền suy ra:
(s2+3s+2)C(s) = (3s+10)R(s)
Phƣơng trình vi phân mô tả hệ thống:
c(t ) 3c(t ) 2c(t ) 3r(t ) 10r (t ) (1)
Đặt biến trạng thái nhƣ sau:
x1 (t ) c(t ) (2)
x2 (t ) x1 (t ) 1r (t ) (3)
x2 (t ) c(t ) 1r (t )
c(t ) x 2 (t ) 1r(t )
Thay vào phƣơng trình vi phân ta đƣợc:
[ x 2 (t ) 1r(t )] 3[ x2 (t ) 1r (t )] 2 x1 (t ) 3r(t ) 10r (t )
x 2 (t ) 1r(t ) 3x2 (t ) 31r (t ) 2 x1 (t ) 3r(t ) 10r (t )
x 2 (t ) 2 x1 (t ) 3x2 (t ) (3 1 )r(t ) (10 31 )r (t ) (4)
Chọn 1 sao cho đạo hàm của tín hiệu vào trong biểu thức (4) bị triệt tiêu:
3- 1 = 0 1 = 3
Thay vào (4) ta đƣợc:
44
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
x 2 (t ) 2 x1 (t ) 3x2 (t ) r (t ) (5)
Kết hợp (3) và (5), để ý 1 = 3, ta đƣợc hệ phƣơng trình sau:
x1 (t ) x2 (t ) 3r (t )
x 2 (t ) 2 x1 (t ) 3x2 (t ) r (t )
x (t ) 0 1 x1 (t ) 3
1 r (t )
x 2 (t ) 2 3 x2 (t ) 1
Đáp ứng của hệ thống:
x (t )
c(t ) x1 (t ) [1 0] 1
x2 (t )
2.5.3 Cách thành lập hệ phƣơng trình biến trạng thái ở dạng chính tắc
Để thành lập hệ phƣơng trình biến trạng thái dạng chính tắc, ta thực hiện theo các
bƣớc sau đây:
1. Thành lập hệ phƣơng trình biến trạng thái ở dạng thƣờng:
x (t ) Ax (t ) Br (t )
(1)
c (t ) Dx(t )
2. Thực hiện phép biến đổi trạng thái:
x(t ) My(t )
Thay vào phƣơng trình trên ta đƣợc:
My (t ) AMy(t ) Br (t )
c (t ) DMy(t )
y (t ) M 1 AMy(t ) M 1 Br (t )
c(t ) DMy(t )
y (t) Ay(t) Br (t )
(2)
c (t ) Dy(t)
Trong đó:
A=M 1
AM B = M 1B D = DM
Hệ phƣơng trình biến trạng thái (2) tƣơng đƣơng với hệ phƣơng trình (1). Để (2) có
dạng chính tắc, phải chọn M sao cho ma trận M 1 AM chỉ có đƣờng chéo khác 0. Theo lý
thuyết đại số tuyến tinh, ma trận chuyển đổi M đƣợc chọn nhƣ sau:
45
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
1 1 1 1
2 3 n
1
M 12 22 32 2n
1n1 n 1
2 n 1
3 nn1
____
Trong đó i , (i 1, n) là nghiệm của phƣơng trình:
det(sI-A) = 0
Thí dụ: Cho hệ thống có hàm truyền:
C ( s) 3s 10
G( s) 2
R( s) s 3s 2
Hãy thành lập hệ phƣơng trình biến trạng thái dạng chính tắc mô tả hệ thống.
Giải:
Bước 1: Thành lập hệ phƣơng trình biến trạng thái dạng thƣờng
(xem thí dụ 2, mục 2.5.2)
x1 (t ) 0 1 x1 (t ) 3
x (t ) 2 3 x (t ) 1 r (t )
2 2
Đáp ứng của hệ thống:
x (t )
c(t ) x1 (t ) [1 0] 1
x2 (t )
x (t ) Ax (t ) Br (t )
Hay
c (t ) Dx(t )
0 1 3
Với: A B D 1 0
2 3 1
Bước 2:
Thực hiện phép biến đổi: x(t) = My(t)
Ma trận M đƣợc xác định nhƣ sau:
Tìm nghiệm của phƣơng trình: det(sI-A) = 0
1 0 0 1 s 1
det s
0 1
2 3 0 det
2 3 0
s
s(s+3)+2 = 0 s2+ 3s+2 = 0
1
1
2 2
Suy ra:
1 1 1 2 1 2 1
M M 1
1 2 1 (2) (1) 1 1 1 1 1
46
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Với cách biến đổi trên, ta đƣợc hệ phƣơng trình biến trạng thái có dạng:
y (t) Ay(t) Br (t )
c (t ) Dy(t)
Trong đó:
2 1 0 1 1 1 1 0
A = M 1 AM =
1 1 2 3 1 2 0 2
2 1 3 7
B = M 1B =
1 1 1 4
2 1
D = DM = 1 0 2 1
1 1
Vậy hệ phƣơng trình biến trạng thái chính tắc mô tả hệ thống là:
y 1 (t ) 1 0 y1 (t ) 7
y (t ) 0 2 y (t ) 4 r (t )
2 2
y (t )
c (t ) [2 1] 1
y 2 (t )
2.6. TÍNH HÀM TRUYỀN TỪ HỆ PHƢƠNG TRÌNH BIẾN TRẠNG THÁI:
Cho hệ thống mô tả bởi hệ phƣơng trình:
x (t ) Ax (t ) Br (t )
c (t ) Dx(t )
Biến đổi Laplace hai vế phƣơng trình trên (giả sử điều kiện đầu bằng 0):
sX ( s) AX ( s) BR ( s) (1)
C ( s) DX ( s) (2)
(1) (sI-A)X(s) = BR(s)
X(s) = (sI-A)-1BR(s)
DX(s) = D(sI-A)-1BR(s)
C(s) = D(sI-A)-1BR(s)
C ( s)
G ( s) D( sI A) 1 B
R( s )
Thí dụ: Cho hệ thống có hệ phƣơng trình biến trạng thái là:
x1 (t ) 0 1 x1 (t ) 3
x (t ) 2 3 x (t ) 1 r (t )
2 2
47
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Đáp ứng của hệ thống:
x (t )
c(t ) x1 (t ) [1 0] 1
x2 (t )
Tính hàm truyền tƣơng đƣơng của hệ thống.
Giải:
Các ma trận trạng thái:
0 1 3
Với: A B D 1 0
2 3 1
Hàm truyền của hệ thống là:
G(s) = D(sI-A)-1B
1 0 0 1 s 1
(sI-A) = s 2 3 2 s 3
0 1
1
s 1
-1 1 s 3 1
(sI-A) =
2 s 3 s( s 3) 2(1) 2 s
s 3 1
D(sI-A)-1 =
1
1 0 2
1
s 3 1
s 3s 2 2 s s 3s 2
2
s 3 1 3(2s 3) 1
1 3
D(sI-A)-1B =
s 3s 2
2
1 s 3s 2
3s 10
Vậy : G ( s)
s 3s 2
2
2.7. NGHIỆM CỦA HỆ PHƢƠNG TRÌNH BIẾN TRẠNG THÁI:
Cho hệ thống có phƣơng trình biến trạng thái nhƣ sau:
x (t ) Ax(t ) Br (t ) (1)
Hỏi x(t) = ?
Biến đổi Laplace 2 vế phƣơng trình (1) ta đƣợc:
sX(s) – x(0+) = AX(s) + BR(s)
(sI-A)X(s) = x(0+) + BR(s)
X(s) = (sI-A)-1 x(0+) + (sI-A)-1BR(s) (2)
Đặt (s) (sI-A)-1
Thay vào phƣơng trình (2) ta đƣợc:
48
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
X ( s) ( s) x(0 ) ( s) BR( s)
Biến đổi Laplace ngƣợc hai vế phƣơng trình (3), ta đƣợc:
t
x (t ) (t ) x (0 ) (t )BR( )d
0
Trong đó:
(t ) L 1[(s)] L 1[(sI A) 1 ] ma trận quá độ
Tóm lại:
Để tính nghiệm của hệ phƣơng trình biến trạng thái ta thực hiện các bƣớc sau đây:
1. Tính ( s) ( sI A) 1
2. Tính ma trận quá độ: (t ) L 1[(s)]
3. Tính nghiệm của phƣơng trình biến trạng thái:
t
x (t ) (t ) x (0 ) (t ) BR( )d
0
Nếu điều kiện đầu bằng 0 thì:
t
x (t ) (t ) BR( )d
0
Nếu muốn tìm đáp ứng của hệ thống bằng phƣơng pháp biến trạng thái, trƣớc tiên
tìm nghiệm của hệ phƣơng trình biến trạng thái, sau đó tính:
c(t) = Dx(t)
Chú ý: Đáp ứng của hệ thống có thể tính từ hàm truyền:
c(t ) L 1[C (s)] L 1[ R(s).G(s)]
Hai công thức nghịch đảo của ma trận:
1
a11 a12 1 a 22 a12
a
21 a 22 a11.a 22 a12a 21 a 21 a11
a 22 a 32 a 12 a 32 a 21 a 31
a 11 a 12 a 13
1
a 23 a 33 a 13 a 33 a 22 a 32
a 1 a 21 a 31 a 11 a 31 a a 21
21 a 22 a 23 11
det A a 23 a 33 a 13 a 33 a 13 a 23
a 31 a 32 a 33
a 21 a 31 a a 31 a 11 a 21
11
a 22 a 32 a 12 a 32 a 12 a 22
49
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
detA = a11 a22 a33 + a12 a23 a31 + a13 a32 a21 - a13 a22 a31 - a11 a23 a32 – a33 a21 a12
Thí dụ: Cho hệ thống mô tả bởi hàm truyền sau:
s
G (s)
(s 1)(s 2)
1. Viết hệ phƣơng trình biến trạng thái mô tả hệ thống trên.
2. Tính ma trận quá độ.
3. Tính đáp ứng của hệ thống khi tín hiệu vào là hàm nấc đơn vị (giả sử điều kiện đầu
bằng 0).
Giải:
1. Phƣơng trình vi phân mô tả hệ thống:
C ( s) s
R( s) ( s 1)( s 2)
( s 2 3s 2)C ( s) sR( s)
c(t ) 3c(t ) 2c(t ) r(t ) (1)
Đặt các biến trạng thái nhƣ sau:
x1 (t ) c(t )
x2 (t ) x1 (t ) 1r (t ) c(t ) 1r (t ) c(t ) x 2 (t ) 1r(t )
Thay vào phƣơng trình (1) ta đƣợc:
x 2 (t ) 1r(t ) 3x 2 (t ) 1r (t ) 2 x1 (t ) r(t )
x 2 (t ) 1 r(t ) 3x 2 (t ) 31 r (t ) 2 x1 (t ) r(t )
x 2 (t ) 2 x1 (t ) 3x 2 (t ) (1 1 )r(t ) 31 r (t )
Chọn 1 1 để đạo hàm cuả tín hiệu vào trong biểu thức trên bị triệt tiêu:
x 2 (t ) 2 x1 (t ) 3x 2 (t ) 3r (t )
Kết hợp với biểu thức đặt biến trạng thái ta có hệ phƣơng trình sau;
x1 (t ) x2 (t ) r (t )
x 2 (t ) 2 x1 (t ) 3x2 (t ) 3r (t )
Viết lại dƣới dạng ma trận:
x1 (t ) 0 1 x1 (t ) 1
x (t ) 2 3 x (t ) 3 r (t )
2 2
Đáp ứng của hệ thống:
50
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
x (t )
c(t ) x1 (t ) 1 0 1
x2 (t )
2. Tính ma trận quá độ:
(t ) L 1 (s) L 1 (sI A) 1
Ta có:
1 s 1
sI A s
1 0 0
0 1 2 3 2 s 3
1 s 3 1 1 s 3 1
( s) ( sI A) 1 2 2 s ( s 1)(s 2) 2 s
s 3s 2
s3 1
( s 1)( s 2) ( s 1)( s 2)
(t ) L 1 ( s ) L 1
2 s
( s 1)( s 2) ( s 1)( s 2)
1 s3 1 1
L L
( s 1)( s 2) ( s 1)( s 2)
1 2 1 s
L L
( s 1)( s 2) ( s 1)( s 2)
1 2 1 1 1 1
L s 1 s 2 L s 1 s 2
L 1 2 2 1 2
L 1
s 1 s 2 s 1 s 2
(2e t 2e 2t ) (e t e 2t )
(t ) t 2t t 2t
(2e 2e ) (e 2e )
3. Đáp ứng của hệ thống:
Trƣớc tiên ta tìm nghiệm của hệ phƣơng trình biến trạng thái. Với điều kiện đầu
bằng 0, nghiệm của phƣơng trình trạng thái là:
t
x(t ) (t ) BR( ) d
0
t 2e (t ) e 2(t )
e
(t )
e 1 d
2(t )
0 2e (t ) 2e 2(t ) e
(t )
3
2e
2(t )
t e (t ) 2e 2(t ) e (t ) e 2(t )
t
0 e
(t )
4e e 2e 2(t) 0
2(t ) d (t )
51
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
x (t ) e t e 2t
1 t 2t
x2 (t ) 1 e 2e
Đáp ứng của hệ thống là:
x (t )
c(t ) 1 0 1 x1 (t ) e t e 2t
x2 (t )
Có thể kiểm tra lại kết quả tính toán bằng phƣơng pháp hàm truyền nhƣ sau:
Đáp ứng của hệ thống: C(s) = G(s)R(s)
1
Mà R( s) (tín hiệu vào là hàm nấc đơn vị)
s
s
G( s)
( s 1)(s 2)
1 s 1 1 1
Nên: C ( s)
s ( s 1)(s 2) ( s 1)(s 2) ( s 1) ( s 2)
1 1
Suy ra: c(t ) L 1 C ( s) L 1 t
e e
2t
s 1 s 2
Chú ý:
Tính ma trận quá độ bằng công thức:
(t ) L 1[(s)] L 1[(sI A) 1 ]
tƣơng đối khó khăn về mặt tính toán. Phƣơng pháp sau đây cho phép tính ma trận
quá độ dễ dàng hơn.
Đối với hệ thống bậc n, ngƣời ta chứng minh đƣợc:
(t ) e At C0 I C1[ A] C2 [ A]2 ... C n1[ A]n1 (*)
_______
Thay A = vào phƣơng trình (*), ta sẽ tính đƣợc các hệ số Ci , (i 0, n 1) trong đó λ
là ma trận chéo:
1 0 0
0 2 0
0 0 n
và λi là nghiệm của phƣơng trình (λi đƣợc gọi là các trị riêng của hệ)
det(I A) 0
52
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
Thí dụ: Tính lại ma trận quá độ trong thí dụ trên.
Ta đã viết đƣợc phƣơng trình trạng thái của hệ là:
x1 (t ) 0 1 x1 (t ) 1
x (t ) 2 3 x (t ) 3 r (t )
2 2
Theo công thức (*), ma trận quá độ cho hệ bậc 2 là:
(t ) e At C0 I C1[ A]
Các trị riêng của hệ là nghiệm của phƣơng trình:
det(I A) 0
1 0 0 1
det 0
0 1 2 3
1
det 0
2 3
( 3) 2 0
1
1
1 2
1 0
Vậy
0 2
Thay A = λ vào phƣơng trình (1), ta đƣợc:
e t 0 1 0 2 1
2t
C0 C1
0 e 0 1 0 3
e t C 0 2C1
2t
e C 0 3C1
C 2e t e 2t
0 t 2t
C1 e e
Thay C0 và C1 vào phƣơng trình (1), ta đƣợc:
(t ) C 0 I C1 [ A]
1 0 2t 0 1
(2e t e 2t ) ( e t
e ) 2 3
0 1
2e t e 2t
(t )
e t
e 2t
t
2e e
2t
e t
2e 2t
53
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 2: Mô tả toán học
54
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
Chương 3
ĐẶC TÍNH ĐỘNG HỌC
3.1. KHÁI NIỆM VỀ ĐẶC TÍNH ĐỘNG HỌC
Đặc tính động của hệ thống mô tả sự thay đổi của tín hiệu ở đầu ra của hệ thống theo
thời gian khi có tác động của đầu vào. Trong thực tế các hệ thống điều khiển rất đa dạng,
tuy nhiên những hệ thống đƣợc mô tả bằng mô hình toán học có dạng nhƣ nhau sẽ có đặc
tính động học nhƣ nhau. Để khảo sát đặc tính động của hệ thống tín hiệu vào thƣờng là tín
hiệu cơ bản nhƣ hàm xung đơn vị, hàm nấc đơn vị hay hàm điều hòa. Tuỳ theo dạng của
tín hiệu vào thử mà đặc tính động thu đƣợc là đặc tính thời gian hay đặc tính tần số.
3.1.1. Đặc tính thời gian
Đặc tính thời gian của hệ thống mô tả sự thay đổi của tín hiệu ở đầu ra của hệ
thống khi tín hiệu vào là hàm xung đơn vị hay hàm nấc đơn vị.
r(t) c(t)
Hệ thống
R(s) C(s)
Nếu tín hiệu vào là hàm xung đơn vị r (t ) (t ) thì đáp ứng của hệ thống là:
C(s) = R(s).G(s) = G(s) (do R(s) = 1)
c(t ) L 1 C (s) L 1 G(s) g (t ) (1)
g(t) đƣợc gọi là đáp ứng xung hay còn gọi là hàm trọng lƣợng của hệ thống.
Vậy đáp ứng xung là đáp ứng của hệ thống khi tín hiệu vào là hàm xung đơn vị.
Theo biểu thức (1) đáp ứng xung chính là biến đổi Laplace ngƣợc của hàm truyền.
Nếu tín hiệu vào là hàm nấc đơn vị r(t) = 1(t)thì đáp ứng của hệ thống là:
G( s) 1
C ( s) R( s).G( s) (do R(s)= )
s s
G( s)
t
c(t ) L 1 C ( s) L 1 g ( )d (2)
s 0
Biểu thức (2) có đƣợc do tính chất ảnh của tích phân của phép biến đổi Laplace. Đặt:
55
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
t
h(t ) g ( )d (3)
0
h(t) đƣợc gọi là đáp ứng nấc hay còn gọi là hàm quá độ của hệ thống.
Vậy đáp ứng nấc là hàm đáp ứng của hệ thống khi tín hiệu vào là hàm nấc đơn vị.
Theo biểu thức (3) đáp ứng nấc chính là tích phân của đáp ứng xung.
Ví dụ: Cho hệ thống có hàm truyền là:
s 1
G( s)
s( s 5)
Xác định hàm trọng lƣợng và hàm quá độ của hệ thống.
Giải: Hàm trọng lƣợng:
s 1 1 1 4
g (t ) L 1 G ( s) L 1 L
s( s 5) 5s 5( s 5)
1 4
g (t ) e 5t
5 5
Hàm quá độ:
t
1 4 1
t t
4
Cách 1: h(t ) g ( ) e 5t d e 5t
0 0
5 5 5 25 0
1 4 4
h(t ) t e 5t
5 25 25
G( s) s 1
Cách 2: h(t ) L 1 L 1 2 1
s s ( s 5)
Thực hiện phép biến đổi Laplace ngƣợc ta đƣợc kết quả nhƣ trên.
Nhận xét: Ta có thể dùng hàm trọng lƣợng hay hàm quá độ thì sẽ suy ra đƣợc hàm
truyền dễ dàng bằng các công thức sau đây:
G(s) L g (t )
Ví dụ 2: Cho hệ thống có đáp ứng nấc đơn vị là:
h(t ) 1 32t 2e 3t
Xác định hàm truyền của hệ thống.
Giải: Theo đề bài, ta có:
dh(t )
G( s) L 2t 3t
L 6e 6e )
6
6
6
s 2 s 3 ( s 2)(s 3)
dt
3.1.2. Đặc tính tần số
Đặc tính tần số của hệ thống tuyến tính mô tả quan hệ giữa tín hiệu ra và tín hiệu vào
của hệ thống ở trạng thái xác lập khi thay đổi tần số của tín hiệu dao động điều hoà tác
động ở đầu vào của hệ thống.
Xét hệ tuyến tính liên tục có hàm truyền là G(s), giả sử tín hiệu vào là tín hiệu hình sin:
R
r (t ) Rm sin t R( s) 2 m 2
s
56
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
Tín hiệu ra của hệ thống là:
Rm
C ( s) R( s).G( s) 2 G( s)
s
2
Giả sử G(s) có n cực pi phân biệt thỏa pi j , ta có thể phân tích C(s) dƣới dạng:
n
i
C ( s)
s j s j i 1 s pi
Biến đổi Laplace ngƣợc biểu thức trên, ta đƣợc:
n
c(t ) e jt
e jt
i pi t
i 1
Nếu hệ thống ổn định thì tất cả các cực pi đều có phần thực âm. Khi đó:
n
lim i ep i t 0
t
i 1
Do đó: c xl (t ) e jt e jt (6)
Nếu G(s) có cực bội thì ta cũng có thể chứng minh đƣợc đáp ứng xác lập của hệ thống
có dạng (6). Các hệ số và xác định bởi công thức:
R R G( j )
G( s) 2 m 2 ( s j ) s j m
s 2j
(7)
R R G( j )
G( s) 2 m 2 ( s j ) s j m (8)
s 2j
Thay (7) và (8) vào (6), rút gọn biểu thức ta đƣợc:
c xl (t ) Rm G( j ) sin(t G( j )) (9)
Biểu thức (9) cho thấy ở trạng thái xác lập tín hiệu ra của hệ thống là tín hiệu hình sin,
cùng tần số với tín hiệu vào, biên độ tỉ lệ với biên độ vào (hệ số tỉ lệ là G( j ) và lệch
pha so với tín hiệu vào (độ lệch pha là G( j ) )
Định nghĩa: Đặc tính tần số của hệ thống là tỉ số giữa tín hiệu ra ở trạng thái xác lập
và tín hiệu vào hình sin.
C ( j )
Đặc tính tần số = (10)
R ( j )
Từ định nghĩa (10) và biểu thức (9) ra rút ra:
Đặc tính tần số = G(s) s j G( j )
Ví dụ 3: Nếu hệ thống có hàm truyền là:
10( s 3)
G( s)
s( s 1)
thì đặc tính tần số của hệ thống là:
10( j 3)
G( j )
j ( j 1)
57
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
Tổng quát đặc tính tần số G( j ) là một hàm phức nên có thể biểu diễn dƣới dạng đại
số hoặc dạng cực:
G( j ) P( ) jQ( ) M ( )e j ( )
Trong đó: P( ) là phần thực Q( ) là phần ảo
M ( ) là đáp ứng biên độ, ( ) là đáp ứng pha
Quan hệ giữa hai cách biểu diễn G( j ) nhƣ sau:
M ( ) G( j ) P 2 ( ) Q 2 ( )
Q( )
( ) G( j ) tg 1
P( )
P() M () cos ()
Q() M () sin ()
Để biểu diễn đặc tính tần số một cách trực quan, ta có thể dùng đồ thị. Có hai dạng
đồ thị thƣờng sử dụng:
Biểu đồ Bode là hình vẽ gồm 2 thành phần:
1. Biểu đồ Bode biên độ: đồ thị biểu diễn mối quan hệ giữa logarithm của đáp ứng biên
độ L( ) theo tần số .
L() 20 lg M ()
L( ) - là đáp ứng biên độ tính theo đơn vị dB (decibel)
2. Biểu đồ Bode pha: đồ thị biểu diễn mối quan hệ giữa đáp ứng pha ( ) theo tần số .
Cả hai đồ thị trên đều đƣợc vẽ trong hệ tọa độ vuông góc với trục hoành chia theo
thang logarithm cơ số 10. Khoảng cách giữa hai tần số hơn kém nhau 10 lần gọi là một
decade.
Biểu đồ Nyquist: (đƣờng cong Nyquist) là đồ thị biểu diễn đặc tính tần số
G( j ) trong hệ toạ độ cực khi thay đổi từ 0 . Nói cách khác đƣờng cong Nyquist
là tập hợp tất cả các điểm ngọn của vectơ biểu diễn số phức G( j ) (biên độ vectơ là
M ( ) góc của vectơ là ( ) khi thay đổi từ 0 .
Mặc dù biểu diễn dƣới dạng hai đồ thị khác nhau nhƣng thông số có đƣợc từ hệ
thống từ biểu đồ Bode và biểu đồ Nyquist là nhƣ nhau. Tử biểu đồ Bode ta có thể suy ra
đƣợc biểu đồ Nyquist và ngƣợc lại.
Đặc tính tần số của hệ thống có các thông số quan trọng sau đây:
Đỉnh cộng hƣởng (Mp): đỉnh cộng hƣởng là giá trị cực đại của M ( )
Tần số cộng hƣởng ( p ) : là tần số tại đó có đỉnh cộng hƣởng
Tần số cắt biên (c ) : là tần số tại đó biên độ của đặc tính tần số bằng 1 (= 0dB)
M ( c ) 1
L( c ) 0
Tần số cắt pha ( ) : tần số tại đó pha của đặc tính tần số bằng (hay bằng
1800)
58
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
( ) 180 0
Độ dự trữ biên (GM – Gain Margin)
1
GM
M ( )
Hay GM L( ) (dB) (công thức này đƣợc sử dung nhiều hơn)
Độ dự trữ pha ( M -Phase Margin)
. M 180 0 (c )
Độ dự trữ biên và độ dự trữ pha cho biết hệ thống có ổn định không.
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.1. Đồ thị biểu diễn đặc tính của tần số
3.2. CÁC KHÂU ĐỘNG HỌC ĐIỂN HÌNH
3.2.1 Khâu tỉ lệ
Hàm truyền: G(s) = K
Đặc tính thời gian: C(s) = G(s)R(s) = KR(s)
c(t) = Kr(t)
Đặc tính tần số: G(jω) = K
Biên độ: M(ω) = K L(ω) = 20lgK
Pha: φ(ω) = 0
59
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
g(t) h(t)
K K
t t
a) Hàm trọng lượng b) Hàm quá độ
Hình 3.2. Đặc tính thời gian của khâu tỉ lệ
L( ) [dB]
20logK
jQ( )
-1 0 1 lg
10-1 100 101
G(j ) P( )
( ) [độ]
K
+900
-1 0 1 lg
10-1 100 101
-900
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.3. Đặc tính tần số của khâu tỉ lệ
3.2.2.Khâu tích phân lý tƣởng
1
Hàm truyền: G(s) =
s
R( s)
Đặc tính thời gian: C(s) = G(s)R(s) =
s
1
Hàm trọng lƣợng: g (t ) L 1 G( s) L 1 1(t )
s
G( s) 1 1
Hàm quá độ: h(t ) L 1 L 2 t.1(t )
s s
60
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
1 1
Đặc tính tần số: G(jω) = j
j
1 1
Biên độ: M(ω) = L(ω) = 20lgM( )=20lg =-20lg
Pha: φ(ω) = -900
g(t) h(t)
K 1
t t
1
a) Hàm trọng lượng b) Hàm quá độ
Hình 3.4. Đặc tính thời gian của khâu tích phân lý tưởng
L( ) [dB] -20dB/dec
20 jQ( )
0 1 lg
10-1 100 101
-20 P( )
( ) [độ]
+900
-1 0 1 lg
=0
10-1 100 101
-900
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.5. Đặc tính tần số của khâu tích phân lý tưởng
3.2.3. Khâu vi phân lý tƣởng
Hàm truyền: G(s) = s
61
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
Đặc tính thời gian: C(s) = G(s)R(s) = sR(s)
d
Hàm trọng lƣợng: g (t ) h(t ) (t )
dt
G( s)
Hàm quá độ: h(t ) L 1 L 1 (t )
1
s
Đặc tính tần số: G(jω) = jω
Biên độ: M(ω) = ω L(ω) = 20lgM( )=20lgω
Pha: φ(ω) = 900
h(t)
Hình 3.6. Hàm quá độ của khâu vi phân lý tưởng
L( ) [dB] +20dB/dec
20 jQ( )
-1 0 1 lg
10-1 100 101
-20 P( )
=0
( ) [độ]
+900
-1 0 1 lg
10-1 100 101
-900
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.7. Đặc tính tần số của khâu vi phân lý tưởng
62
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
3.2.4. Khâu quán tính bậc nhất
1
Hàm truyền: G(s) =
Ts 1
R( s)
Đặc tính thời gian: C(s) = G(s)R(s) =
Ts 1
1 1 T
t
Hàm trọng lƣợng: g (t ) L 1 e 1(t )
Ts 1 T
1
t
Hàm quá độ: h(t ) L 1 (1 e T
)1(t )
s(Ts 1)
h(t)
g(t)
1/T1 1
1/T2 0.63
t t
0 0 T1 T2
a) Hàm trọng lượng b) Hàm quá độ
Hình 3.8. Đặc tính thời gian của khâu quán tính bậc nhất
1 1 Tj
Đặc tính tần số: G(jω) =
Tj 1 1 T 2 2
1
Phần thực: P( )
1 T 2 2
T
Phần ảo: Q( )
1 T 2 2
Biên độ: M ( ) P 2 ( ) Q 2 ( )
2 2
1 T 1
2 2
2 2
1 T 1 T 1 T 2 2
L(ω) = 20lgM( )=-20lg 1 T 2 2
Q( )
Pha: φ(ω) = tg 1 tg 1 (T )
P( )
Vẽ gần đúng biểu đồ Bode biên độ:
1
+ Nếu : đƣờng thẳng nằm ngang trùng trục hoành
T
1
+ Nếu : đƣờng thẳng có độ dốc −20dB/dec
T
63
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
L( ) [dB]
20 jQ( )
-1 0 1/T 1 lg
1
10
10-1 100
-20dB/dec
-20 P( )
1
=0
G(j )
( ) [độ]
-1 0 1 lg
-1 0 1
10 10 10
-450
-900
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.9. Đặc tính tần số của khâu quán tính bậc nhất
3.2.5. Khâu vi phân bậc nhất
Hàm truyền: G(s) = Ts+1
Đặc tính thời gian: C(s) = G(s)R(s) = R(s)(Ts+1) h(t)
Đặc tính tần số: G( j) Tj 1
Biên độ:
M ( ) 1 T 2 2 L 20 lg 1 T 2 2 1
Pha: tg 1 T t
Hình 3.10. Hàm quá độ của khâu
Vẽ gần đúng biểu đồ Bode biên độ:
vi phân bậc nhất
1
+ Nếu : đƣờng thẳng nằm ngang trùng trục hoành
T
1
+ Nếu : đƣờng thẳng có độ dốc +20dB/dec
T
64
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
L( ) [dB]
jQ( )
20
-1 0 1/T 1 lg
1
10 G(j )
10-1 100
-20dB/dec
=0 P( )
1
( ) [độ]
900
450
-1 0 1 lg
-1 0 1
10 10 10
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.11. Đặc tính tần số của khâu vi phân bậc nhất
3.2.6. Khâu dao động bậc hai
1
- Hàm truyền: G( s) 0 1
T s 2Ts 1
2 2
g(t) h(t)
t t
0 0
a) Hàm trọng lượng b) Hàm quá độ
Hình 3.12. Đặc tính thời gian của khâu quán tính bậc nhất
1
- Đặc tính tần số: G( j )
T 2Tj 1
2 2
65
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
1
- Biên độ: M
1 T 4
2 2 22
T 2 2
L 20 lg M ( ) 20 lg 1 T 2 2 2
4 2T 2 2
2T
- Pha: tg 1 2 2
1 T
Vẽ gần đúng biểu đồ Bode biên độ:
1
+ Nếu : đƣờng thẳng nằm ngang trùng trục hoành
T
1
+ Nếu : đƣờng thẳng có độ dốc -40dB/dec
T
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.13. Đặc tính tần số của khâu vi phân bậc nhất
3.2.7. Khâu trì hoãn (khâu trễ)
Đặc điểm của khâu trễ là tín hiệu ra trễ hơn tín hiệu vào một khoảng thời gian là T.
- Hàm truyền: G( s) e Ts
g(t) h(t)
1 1
t t
T T
a) Hàm trọng lượng b) Hàm quá độ
Hình 3.14. Đặc tính thời gian của khâu trễ
66
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
- Đặc tính tần số: G( j ) e Tj
- Biên độ: M 1 L 0
- Pha: T
Biểu đồ Bode biên độ: là đƣờng thẳng nằm ngang trùng với trục hoành.
jQ( )
L( ) [dB]
-1 0 1 lg j
101
10-1 100
P( )
-1 1
( ) [độ]
-1 0 1 lg -j G(j )
0 1
10-1 10 10
-900
-1800
a) Biểu đồ Bode b) Biểu đồ Nyquist
Hình 3.15. Đặc tính tần số của khâu trễ
3.3. ĐẶC TÍNH ĐỘNG HỌC CỦA HỆ THỐNG TỰ ĐỘNG
3.3.1. Đặc tính thời gian của hệ thống
Xét hệ thống có hảm truyền:
b0 s m b1 s m 1 ... bm 1 s bm
G ( s)
a 0 s n a1 s n 1 ... a n 1 s a n
Biến đổi Laplace của hàm quá độ là:
G( s) 1 b0 s m b1 s m1 ... bm1 s bm
H ( s)
s s a0 s n a1 s n1 ... a n 1 s a n
Tuỳ theo đặc điểm của hệ thống mà đặc tính thời gian của hệ thống có thể khác
nhau. Tuy nhiên chúng ta có thể rút ra kết luận sau đây:
Nếu G(s) không có khâu tích phân, vi phân lý tƣởng thì hàm trọng lƣợng suy
giảm về 0, hàm quá độ có giá trị xác lập ≠ 0.
b0 s m b1 s m1 ... bm1 s bm
g () lim sG( s) lim s n 1
a0 s a1 s ... a n1 s a n
s 0 s 0 n
67
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
1 b s m b s m1 ... bm1 s bm bm
h() lim sH ( s) lim s 0 n 1 n1
a 0
s 0 s 0
s a0 s a1 s ... a n1 s a n n
Nếu G(s) có khâu tích phân lý tƣởng (an=0) thì hàm trọng lƣợng có giá trị xác
lập ≠ 0, hàm quá độ tăng đến ∞.
b s m b1 s m1 ... bm1 s bm bm
g () lim sG( s) lim s 0 n 1
0
a0 s a1 s ... a n 1 s a n1
s 0 s 0 n
1 b0 s m b1 s m1 ... bm1 s bm
h() lim sH ( s) lim s n 1
s 0 s 0
s a 0 s n
a1 s ... a n 1 s
Nếu G(s) có vi phân lý tƣởng (bm=0) thì hàm quá độ suy giảm về 0.
1 b0 s m b1 s m1 ... bm1 s
h() lim sH ( s) lim s n 1
0
s a0 s a1 s ... a n 1 s a n
s 0 s 0 n
Dựa vào đặc tính của hệ thống chúng ta có thể chọn phƣơng pháp phân tích, thiết kế
hệ thống cho phù hợp.
3.3.2. Đặc tính tần số của hệ thống
Xét hệ thống tự động có hàm truyền G(s). G(s) có thể phân tích thành tích các hàm
truyền cơ bản sau:
l
G( s) Gi ( s)
i 1
Đặc tính tần số của hệ thống:
l
G( j ) Gi ( j )
i 1
l l
- Biên độ: M ( ) M i ( ) L( ) Li
i 1 i 1
l
- Pha: ( ) i
i 1
Biểu đồ Bode của hệ thống (gồm nhiều khâu ghép nối tiếp) bằng tổng biểu đồ Bode
của các khâu thành phần.
Vẽ gần đúng biểu đồ Bode biên độ bằng đƣờng tiệm cận.
Giả sử hàm truyền của hệ thống có dạng:
G(s) Ks G1 (s)G2 (s)G3 (s)
0 : hệ thống có khâu vi phân lý tƣởng
0 : hệ thống có khâu tích phân lý tƣởng
Bƣớc 1: Xác định các tần số gãy i 1 / Ti và sắp xếp theo thứ tự tăng dần 1 2 3
Bƣớc 2: Biểu đồ Bode gần đúng đi ngang qua điểm A có toạ độ:
0
L 20 lg K 20 lg 0
ω0 là tần số thoả mãn 0 1 . Nếu ω1 > 1 thì có thể chọn ω0 = 1.
68
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
Bƣớc 3: Qua điểm A vẽ đƣờng thẳng có độ dốc:
20dB / dec nếu G(s) có α khâu tích phân lý tƣởng
20dB / dec nếu G(s) có α khâu vi phân lý tƣởng
Đƣờng thẳng này kéo dài đến tần số gãy kế tiếp.
1
Bƣớc 4: Tại tần số gãy i độ dốc của đƣờng tiệm cận đƣợc cộng thêm một lƣợng:
Ti
20dB / dec i nếu i là tần số gãy của khâu quán tính bậc 1
20dB / dec i nếu i là tần số gãy của khâu vi phân bậc 1
40dB / dec i nếu i là tần số gãy của khâu dao động bậc 2
40dB / dec i nếu i là tần số gãy của khâu vi phân bậc 2
Đƣờng thẳng này kéo dài đến tần số gãy kế tiếp
Bƣớc 5: Lập lại bƣớc 4 cho đến khi vẽ xong đƣờng tiệm cận tại tần số gãy cuối cùng.
Thí dụ 1: Vẽ biểu đồ Bode biên độ gần đúng của hệ thống có hàm truyền là:
100(0,1s 1)
G( s)
s(0,01s 1)
Dựa vào biểu đồ Bode gần đúng, hãy xác định tần số cắt biên của hệ thống.
Giải:
Các tần số gãy:
1 1 1 1
1 10(rad / sec) 2 100(rad / sec)
T1 0,1 T2 0,01
Biểu đồ Bode qua điểm A có toạ độ:
1
L 20 lg K 20 lg 100 40
Biểu đồ Bode có biên độ gần đúng nhƣ sau:
Theo hình vẽ, tần số cắt biên của hệ thống là 103rad/sec.
69
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 3: Đặc tính động học
Thí dụ 2: Xác định hàm truyền của hệ thống có biểu đồ Bode biên độ gần đúng nhƣ sau:
54 26
- Độ dốc đoạn CD: 40(dB / dec )
2 1.301
- Các tần số gãy:
40 26
lg g1 0 0.7 g1 10 0.7 5(rad / sec)
20
lg g 2 1.301 g 2 101.301 20(rad / sec)
lg g 3 2 g 3 10 2 100(rad / sec)
- Hàm truyền cần tìm có dạng:
K T1 s 1T2 s 1
2
G( s)
sT3 s 1
2
20 lg K 40 K 100
1 1 1 1 1 1
T1 0.2 T2 0.05 T3 0.01
g1 5 g 2 20 g3 100
70
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Chương 4
KHẢO SÁT TÍNH ỔN ĐỊNH
CỦA HỆ THỐNG TỰ ĐỘNG
4.1. KHÁI NIỆM VỀ ỔN ĐỊNH
Định nghĩa: ổn định BIBO
Hệ thống đƣợc gọi là ổn định BIBO (Bounded Input Bounded Output) nếu đáp ứng
của hệ bị chặn khi tín hiệu vào bị chặn.
Mối liên hệ giữa tính ổn định và hàm truyền mô tả hệ thống:
Cực và zero
Cho hệ thống tự động có hàm truyền:
C ( s) b0 s m b1 s m1 bm1 s bm
G( s)
R( s) a0 s n a1 s n1 a n 1 s a n
Đặt: A(s) a0 s n a1s n1 an1s an : mẫu số hàm truyền
B(s) b0 s m b1 s m1 bm1 s bm : tử số hàm truyền
Zero: là nghiệm của tử số hàm truyền, tức là nghiệm của phƣơng trình B(s) = 0. Do B(s) bậc m
nên có hệ thống có m zero ký hiệu là zi, i=1, 2, …, m.
Cực: là nghiệm của mẫu số hàm truyền, tức là nghiệm của phƣơng trình A(s) = 0. Do A(s) bậc n
nên hệ thống có n ký hiệu là pi, i =1, 2, …, n.
Giản đồ cực – zero là đồ thị biểu diễn vị trí các cực và các zero của hệ thống trong mặt phẳng
phức.
Giản đồ cực - zero
Điều kiện ổn định
71
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Tính ổn định của hệ thống phụ thuộc vào vị trí các cực.
- Hệ thống có tất cả các cực có phần thực âm (có tất cả các cực đều nằm bên trái
mặt phẳng phức): hệ thống ổn định.
- Hệ thống có cực có phần thực bằng 0 (nằm trên trục ảo), các cực còn lại có phần
thực bằng âm: hệ thống ở biên giới ổn định.
- Hệ thống có ít nhất một cực có phần thực dƣơng (có ít nhất một cực nằm bên phải
mặt phẳng phức): hệ thống không ổn định.
Phƣơng trình đặc trƣng (PTĐT)
- Phƣơng trình đặc trƣng: phƣơng trình A(s) = 0
- Đa thức đặc trƣng: đa thức A(s)
Chú ý:
Hệ thống hồi tiếp:
Hàm truyền tƣơng đƣơng của hệ thống:
G( s)
Gk ( s )
1 G( s) H ( s)
Phƣơng trình đặc trƣng của hệ thống hồi tiếp là:
1+G(s)H(s) = 0
Hệ thống đƣợc mô tả bởi hệ PTTT:
x (t ) Ax (t ) Br (t )
c(t ) Dx(t )
Hàm truyền của hệ thống là:
G(s) D(sI A) 1 B
Phƣơng trình đặc trƣng của hệ:
det(sI − A) = 0
4.2. TIÊU CHUẨN ỔN ĐỊNH ĐẠI SỐ
4.2.1. Điều kiện cần
Điều kiện cần để hệ thống ổn định là tất cả các hệ số của phƣơng trình đặc trƣng phải
khác 0 và cùng dấu.
Thí dụ: Hệ thống có phƣơng trình đặc trƣng:
s 3 3s 2 2s 1 =0 không ổn định
s 2s 5s 3 0
4 2
không ổn định
s 4 4s 3 5s 2 2s 1 0 chƣa kết luận đƣợc
4.2.2. Tiêu chuẩn ổn định đại số
Cho hệ thống có phƣơng trình đặc trƣng:
72
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
a0 s n a1 s n1 an1 s an 0
Muốn xét tính ổn định của hệ thống theo tiêu chuẩn Routh, trƣớc tiên ta thành lập
bảng Routh theo qui tắc:
- Bảng Routh có n+1 hàng.
- Hàng 1 của bảng Routh gồm các hệ số có chỉ số chẳn.
- Hàng 2 của bảng Routh gồm các hệ số có chỉ số lẻ.
- Phần tử ở hàng i cột j của bảng Routh (i ≥ 3) đƣợc tính theo công thức:
cij ci 2, j 1 i ci 1, j 1
ci 2,1
Với: i
ci 1,1
sn c11a0 c12 a2 c13 a4 c14 a 6 …
s n 1 c21 a1 c22 a3 c23 a c24 a 7 …
s n2 c31 c12 3 c22 c32 c13 3 c23 c33 c14 3 c24 c34 c15 3 c25 …
c11
3
c 21
c 21 s n 3 c41 c22 4 c32 c42 c23 4 c33 c43 c24 4 c34 c44 c25 4 c35 …
4
c31
… … … … … … …
c n 2.1 s0 c xl cn2.2 n cn1.2
n
c n 1.1
Phát biểu tiêu chuẩn Routh:
Điều kiện cần và đủ để hệ thống ổn định là tất cả các phần tử nằm ở cột 1 của
bảng Routh đều dương. Số lần đổi dấu của các phần tử ở cột 1 của bảng Routh bằng số
nghiệm của phƣơng trình đặc trƣng nằm bên phải mặt phẳng phức.
Thí dụ 1: Hãy xét tính ổn định của hệ thống có phƣơng trình đặc trƣng là:
s 4 4s 3 5s 2 2s 1 0
Giải: Bảng Routh
s4 1 5 1
s3 4 2 0
1 s2 1 9 1
3 5 .2
4 4 2
8 s1 8 10 0
4 2 .1
9 9 9
81 s0 1
5
20
73
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Vì tất cả các phần tử ở cột 1 bảng Routh đều dƣơng nên tất cả các nghiệm của
phƣơng trình đặc tính đều nằm bên trái mặt phẳng phức, do đó hệ thống ổn định.
Thí dụ 2:
Hãy xét tính ổn định của hệ thống tự động có sơ đồ khối nhƣ sau:
50 1
G( s) H ( s)
s( s 3)(s 2 s 5) s2
Giải:
Phƣơng trình đặc trƣng của hệ thống là:
1 G( s ) H ( s ) 0
50 1
1 . 0
s ( s 3)( s s 5) ( s 2)
2
s( s 3)( s 2 s 5)( s 2) 50 0
s 5 6s 4 16s 3 31s 2 30s 50 0
Bảng Routh:
s5 1 16 30
s4 6 31 50
1 s3 1 1 0
3 16 .31 10.83 30 .50 21.67
6 6 6
8 s2 6 50
4 31 21.67 18.99
9 10.83
10.83 s1 10.83 0
5 21.67 50 6.84
18.99 18.99
s0 50
Vì các phần tử ở cột 1 bảng Routh đổi dấu 2 lần nên phƣơng trình đặc tính đều có 2
nghiệm nằm bêm phải mặt phăng phức, do đó hệ thống không ổn định.
Thí dụ 3: Cho hệ thống có sơ đồ khối nhƣ sau:
K
G( s)
s( s s 1)( s 2)
2
Xác định điều kiện của K để hệ thống ổn định:
74
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Giải:
Phƣơng trình đặc tính:
1 G( s) 0
K
1 0
s( s s 1)( s 2)
2
s 4 3s 3 3s 2 2s K 0
Bảng Routh:
s4 1 3 K
s3 3 2 0
1 s2 1 7 K
3 3 .2
3 3 3
9 s1 9 0
4 2 .K
7 7
s0 K
Điều kiện để hệ thống ổn định:
9
2 K 0 14
7 0K
0 9
K
Các trƣờng hợp đặc biệt:
Trƣờng hợp đặc biệt 1: Nếu bảng Routh có hệ số ở cột 1 của hàng nào đó bằng 0, các hệ
số còn lại của hàng đó khác 0 thì ta thay hệ số bằng 0 ở cột 1 bởi số ε dương nhỏ tùy ý,
sau đó quá trình tính toán đƣợc tiếp tục.
Thí dụ: Xét tính ổn định của hệ thống có phƣơng trình đặc trƣng là:
s 4 2s 3 4s 2 8s 3 0
Giải:
Bảng Routh:
s4 1 4 3
s3 2 8 0
1 s2 1 3
3 4 .8 0
2 2
s2 0 3
9 s1 9 0
4 2 .K
7 7
s0 K
Kết luận: Vì các hệ số ở cột 1 bảng Routh đổi dấu 2 lần nên phƣơng trình đặc trƣng của
hệ thống có hai nghiệm nằm bên phải mặt phẳng phức, do đó hệ thống không ổn định .
Trƣờng hợp đặc biệt 1: Nếu bảng Routh có tất cả các hệ số của hàng nào đó bằng 0:
- Thành lập đa thức phụ từ các hệ số của hàng trƣớc hàng có tất cả các hệ số bằng
0, gọi đa thức đó là A0(s).
75
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Thay hàng có tất cả các hệ số bằng 0 bởi một hàng khác có các hệ số chính là các
hệ số của đa thức dA0(s)/ds, sau đó quá trình tính toán tiếp tục.
Chú ý: Nghiệm của đa thức phụ A0(s) cũng chính là nghiệm của phƣơng trình đặc trƣng.
Thí dụ: Xét tính ổn định của hệ thống có phƣơng trình đặc trƣng:
s 5 4s 4 8s 3 8s 2 7s 4 0
Xác định số nghiệm của phƣơng trình đặc tính nằm bên trái, bên phải hay trên trục
ảo của mặt phẳng phức.
Giải:
Bảng Routh:
s5 1 8 7
s4 4 8 4
1 s3 1 1 0
3 8 8 6 7 4 6
4 4 4
4 s 2
4 4
4 8 6 4
6 16
6 s 1
6 0
5 6 4 0
14 4
s1 8
4 s0 4
6 4 0 4
8 8
dA ( s)
Đa thức phụ: A0 (s) 4s 2 4 0 8s 0
ds
Nghiệm của đa thức phụ (cũng chính là nghiệm của phƣơng trình đặc trƣng):
A0 (s) 4s 2 4 s j
Kết luận:
- Các hệ số cột 1 bảng Routh không đổi dấu nên phƣơng trình đặc trƣng không có
nghiệm nằm bên phải mặt phẳng phức.
- Phƣơng trình đặc tính có 2 nghiệm nằm trên trục ảo.
- Số nghiệm nằm bên trái mặt phẳng phức là 4-2=2
Hệ thống ở biên giới ổn định.
4.2.3. Tiêu chuẩn ổn định Hurwitz:
Cho hệ thống có phƣơng trình đặc trƣng:
a0 s n a1 s n1 an1 s an 0
Muốn xét tính ổn định của hệ thống theo tiêu chuẩn Hurwitz, trƣớc tiên ta thành lập
ma trận Hurwitz theo qui tắc:
- Ma trận Hurwitz là ma trận vuông cấp n x n.
- Đƣờng chéo của ma trận Hurwitz gồm các hệ số từ a1 đến an.
- Hàng lẻ của ma trận Hurwitz gồm các hệ số có chỉ số lẻ theo thứ tự tăng dần nếu
ở bên phải đƣờng chéo và giảm dần nếu ở bên trái đƣờng chéo.
76
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Hàng chẵn của ma trận Hurwitz gồm các hệ số có chỉ số chẵn theo thứ tự tăng
dần nếu ở bên phải đƣờng chéo và giảm dần nếu ở bên trái đƣờng chéo.
a1 a3 a5 a7 0
a a2 a4 a6 0
0
0 a1 a3 a5 0
0 a0 a2 a4 0
0 a n
Phát biểu tiêu chuẩn Hurwitz:
Điều kiện cần và đủ để hệ thống ổn định là tất cả các định thức con chứa đƣờng chéo
của ma trận Hurwitz đều dƣơng.
Thí du: Cho hệ thống tự động có phƣơng trình đặc trƣng là:
s 3 4s 2 3s 2 0
Hỏi hệ thống có ổn định không ?
Giải:
Ma trận Hurwitz:
a1 0 4 2 0
a3
a 0 1 3 0
a2
0
0a1 a3 0 4 2
Các định thức: 1 a1 1
a1 a3 4 2
2 4 3 1 2 10
a0 a2 1 3
a1 a3 0
a1 a3 4 2
3 a0 a2 0 a3 2 2 10 20
a0 a2 1 3
0 a1 a3
Vì tất cả các định thức con chứa đƣờng chéo của ma trận Hurwitz đều dƣơng nên hệ
thống ổn định.
Các hệ quả của tiêu chuẩn Hurwitz
Hệ bậc 2 ổn định nếu phƣơng trình đặc trƣng thỏa mãn điều kiện:
____
ai 0, i 0,2
Hệ bậc 3 ổn định nếu phƣơng trình đặc trƣng thỏa mãn điều kiện:
____
ai 0, i 0,3
a1 a 2 a0 a3 0
Hệ bậc 4 ổn định nếu phƣơng trình đặc trƣng thỏa mãn điều kiện:
77
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
____
a i 0, i 0,4
a1 a 2 a 0 a3 0
a1 a 2 a3 a0 a3 a1 a 4 0
3 2
4.3. PHƢƠNG PHÁP QUỸ ĐẠO NGHIỆM SỐ
4.3.1. Khái niệm
- Xét hệ thống có phƣơng trình đặc tính: s 2 4s K 0 (1)
- Nghiệm của phƣơng trình đặc tính ứng với các giá trị khác nhau của K.
Vẽ các nghiệm của phƣơng trình (1) tƣơng ứng với các giá trị của K lên mặt phẳng
phức. Nếu cho K thay đổi liên tục từ 0 đến +∞, tập hợp tất cả các nghiệm của phƣơng
trình (1) tạo thành những đƣờng đậm nét nhƣ trên hình vẽ. Đƣờng đậm nét trên hình vẽ
đƣợc gọi là quỹ đạo nghiệm số.
Định nghĩa:
Quỹ đạo nghiệm số là tập hợp tất cả các nghiệm của phƣơng trình đặc trƣng của hệ
thống khi có một thông số nào đó trong hệ thay đổi từ 0 → ∞.
4.3.2. Qui tắc vẽ quỹ đạo nghiệm số
Xét hệ thống điều khiển:
Phƣơng trình đặc tính của hệ:
1+G(s)H(s) = 0
Muốn áp dụng các qui tắc vẽ quỹ đạo nghiệm số, trƣớc tiên ta phải biến đổi tƣơng
đƣơng phƣơng trình đặc trƣng về dạng:
N ( s)
1 K 0 (2)
D( s )
78
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
N ( s)
Đặt: G0 ( s ) K
D( s )
Gọi n là số cực của G0(s) , m là số zero của Go(s).
(2) 1 G0 (s) 0
G ( s) 1 Điều kiện biên độ
0 Điều kiện pha
G0 ( s) (2l 1)
Sau đây là 11 qui tắc vẽ quỹ đạo nghiệm số của hệ thống có phƣơng trình đặc tính có
dạng (2):
Qui tắc vẽ QĐNS
Qui tắc 1: Số nhánh của quỹ đạo nghiệm số = bậc của phƣơng trình đặc tính
= số cực của G0(s) = n.
Qui tắc 2: Khi K = 0: các nhánh của quỹ đạo nghiệm số xuất phát từ các cực của G0(s).
Khi K tiến đến +∞ : m nhánh của quỹ đạo nghiệm số tiến đến m zero của
G0(s), n−m nhánh còn lại tiến đến ∞ theo các tiệm cận xác định bởi qui tắc 5 và
qui tắc 6.
Qui tắc 3: Quỹ đạo nghiệm số đối xứng qua trục thực.
Qui tắc 4: Một điểm trên trục thực thuộc về quỹ đạo nghiệm số nếu tổng số cực và zero
của G0(s) bên phải nó là một số lẻ.
Qui tắc 5: Góc tạo bởi các đƣờng tiệm cận của quỹ đạo nghiệm số với trục thực xác định
bởi :
(2l 1)
l 1,1,2
nm
Qui tắc 6: Giao điểm giữa các tiệm cận với trục thực là điểm A có tọa độ xác định bởi:
n m
cuc zero p z i i
OA i 1 i 1
nm nm
Qui tắc 7: Điểm tách nhập (nếu có) của quỹ đạo nghiệm số nằm trên trục thực và là
nghiệm của phƣơng trình:
dK
0
ds
Qui tắc 8: Giao điểm của quỹ đạo nghiệm số với trục ảo có thể xác định bằng cách áp
dụng tiêu chuẩn Routh–Hurwitz hoặc thay s=jω vào phƣơng trình đặc trƣng (2),
cân bằng phần thực và phần ảo sẽ tìm đƣợc giao điểm với trục ảo và giá trị K.
Qui tắc 9: Góc xuất phát của quỹ đạo nghiệm số tại cực phức pj đƣợc xác định bởi:
j 180 0 arg pi z i arg p j z i
m n
i 1 i 1
i j
Dạng hình học của công thức trên là:
j 180 0 góc từ các zero đến cực pj ) − ( góc từ các cực còn lại đến cực p j )
79
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Qui tắc 10: Tổng các nghiệm là hằng số khi K thay đổi từ 0→∞.
Qui tắc 11: Hệ số khuếch đại dọc theo quỹ đạo nghiệm số có thể xác định từ điều kiện
biên độ:
N ( s)
K 1
D( s )
Thí dụ: Cho hệ thống có sơ đồ khối sau:
K
G( s)
s( s 2)(s 3)
Hãy vẽ QĐNS của hệ thống khi K=0→∞.
Giải:
Phƣơng trình đặc tính của hệ thống:
K
1 G( s) 0 1 0
s( s 2)(s 3)
Các cực: 3 cực p1 0 p2 2 p3 3
Các zero: không có
QĐNS gồm có 3 nhánh xuất phát từ các cực khi K = 0. Khi K→∞, 3 nhánh của QĐNS
sẽ tiến đến vô cùng theo các tiệm cận xác định bởi:
- Góc giữa các tiệm cận và trục thực:
1 l 0
3
2l 1 2l 1 l 1
2
nm 30 3
3 l 1
- Giao điểm giữa các tiệm cận và trục thực:
OA
cuc zero 0 (2) (3) 0 5
nm 30 3
dK
- Điểm tách nhập là nghiệm của phƣơng trình đặc tính: 0
ds
Ta có:
1 K s( s 2)(s 3) s 3 5s 2 6s
dK
ds
3s 2 10s 6
dK s1 2.549
0
ds s 2 0.785
80
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Giao điểm của QĐNS với trục ảo có thể đƣợc xác định bằng 1 trong 2 sau đây:
Cách 1: Áp dụng tiêu chuẩn Routh:
1 s 3 5s 2 6s K 0 (2)
Bảng Routh
s3 1 6
s2 5 K
1 s1 1 0
3 6- xK=0
5 5
s0 K
Điều kiện để hệ thống ổn định
1
6 K 0
5 0 K 30
K 0
Vậy hệ số khuếch đaị giới hạn là Kgh = 0
Thay giá trị Kgh = 30 vào phƣơng trình (2) , giải phƣơng trình ta đƣợc giao điểm của
QĐNS của trục ảo.
1 s 3 5s 2 6s 30 0
s1 5
s2 j 6
s j 6
3
dK
Do đó: 0 3s 2 16s 20 0
ds
s1 3.33
s 2 2.00
Vậy QĐNS có 2 điểm tách nhập.
Giao điểm của QĐNS với trục ảo đƣợc xác định bằng cách thay s j vào phƣơng
trình đặc tính.
- j 5 j 6 j K 0 j 3 5 2 6 j K 0
3 2
0
j 3 6 j 0 K 0
5 2 K 0
6
K 30
81
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Thí dụ: Cho hệ thống hồi tiếp âm đơn vị, trong đó hàm truyền hở là:
K
G( s)
s s 8s 20
2
Hãy vẽ QĐNS của hệ thống khi K = 0→∞.
Giải:
Phƣơng trình đặc tính của hệ thống:
K
1 G( s) 0 1 0 (1)
s( s 8s 3)
2
Các cực: 3 cực p1 0 p2,3 4 j 2
Các zero: không có
QĐNS gồm 2 nhánh xuất phát tại các cực khi K = 0. Khi K →∞, 3 nhánh tiến đến vộ
cùng theo tiệm cận xác định bởi:
- Góc giữa các tiệm cận và trục thực:
1 l 0
3
2l 1 2l 1 l 1
2
nm 30 3
3 l 1
82
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Giao điểm giữa các tiệm cận và trục thực:
OA
cuc zero 0 (4 j 2) (4 j 2) 0 8
nm 30 3
dK
- Điểm tách nhập là nghiệm của phƣơng trình: 0
ds
Ta có:
1 K s 3 8s 2 20s
dK
ds
3s 2 16s 20
dK s 3.33
Do 0 3s 2 16s 20 1
ds s 2 2.00
Vậy QĐNS có 2 điểm tách nhập.
- Giao điểm của QĐNS với trục ảo
- (1) s 3 8s 2 20s K 0
Thay s j ta đƣợc:
1 s 3 8s 2 20s K 0
j 3 8 j 2 20 j K 0 j 3 8 j 2 20 j K 0
0
8 j 3 K 0 K 0
3
20 0
20
K 160
2 180 0 arg p 2 p1 arg p 2 p3
180 0 arg 4 j 2 0 arg 4 j 2 4 j 2
2
180 0 tg 1 90
1
180 153.5 90
0
2 63.5 0
K ( s 1)
G( s)
s( s 3) s 2 8s 20
K ( s 1)
1 G( s) 0 1 0
s( s 3) s 2 8s 20
p1 0 p2 3 p3, 4 4 j 2
z1 1
83
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
1 3 l 0
2l 1 2l 1
2
l 1
nm 4 1 3
3 l 1
OA
cuc zero 0 (3) (4 j 2) 4 j 2 1 10
nm 4 1 3
2
1 K s(s 3) s 8s 20 dK 3s 36s 77 s 2 88s 60
4 3 2
( s 1) ds s 1
dK s1, 2 3.67 j1.05
0
ds s3, 4 0.66 j 0.97
1 s 4 11s 3 44s 2 60 K s K 0 (2)
4 11 j 3 44 2 60 K j K 0
0
K 0
4 44 j 2 K 0 5.893 V
11 3 44 2 60 K K 322
j1.314
K 61.7
Vậy giao điểm cần tìm là: s j5.893
Hệ số khuếch đại giới hạn là: K gh 322
- Góc xuất phát của QĐNS tại cực phức
p3 :
3 180 1 2 3 4
180 146,3 (153,4 116,6 90)
3 33.7 0
Thí dụ 4: Cho hệ thống điều khiển có sơ đồ khối nhƣ sau:
10
G( s)
s 9s 3
2
K
GC ( s) K P I
s
84
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Cho KI = 2,7, hãy vẽ QĐNS của hệ thống sau đây khi K P 0 . Biết rằng
dK P / ds 0 có 3 nghiệm là: -3, -3, 1.5.
- Khi K P 270, K I 2.7 , hệ thống có ổn định không?
Giải:
- Phƣơng trình đặc trƣng của hệ thống:
1 GC (s)G(s) 0
2.7 10
1 KP 2 0
s s 9s 3
10 K P s
1 0
( s 9)( s 2 3)
- Các cực: p1 9 p2 j 3 p3 j 3
- Các zero: z1=0
- Tiệm cận:
2l 1 2l 1 / 2 (l 0
nm 3 1 / 2 l 1
OA
cuc zero 9 ( j
3 ) ( j 3 ) 0
9
nm 3 1 2
s1 3
dK P
- Điểm tách nhập 0 s 2 3
ds s 1.5
3
QĐNS có hai điểm tách nhập trùng nhau tại -3.
Góc xuất phát của QĐNS tại cực phức p2.
2 180 0 arg p 2 z1 arg p 2 z1 arg p 2 p3
180 0 arg j 3 0 arg j 3 9 arg j 3 j 3
3
180 0 90 tg 1 90
9
2 169 0
85
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Khi K I 2.7 , QĐNS của hệ thống nằm
hoàn toàn bên trái mặt phẳng phức khi
K P 0 , do đó hệ thống ổn định
khi K I 2.7 , K P 270 .
4.4. TIÊU CHUẨN ỔN ĐỊNH TẦN SỐ
4.4.1. Khái niệm về đặc tính tần số:
Xét hệ thống tuyến tính khi tín hiệu vào là tín hiệu hình sin thì ở trạng thái xác lập
tín hiệu ra cũng là tín hiệu hình sin cùng tần số với tín hiệu vào, khác biên độ và pha.
r(t)=Rmsin(jω) c(t)=Cmsin(jω+φ)
HT
R(jω) C(jω)
Định nghĩa: Đặc tính tần số của hệ thống là tỉ số giữa tín hiệu ra ở trạng thái xác lập
và tín hiệu vào hình sin.
C j
Đặc tính tần số
R ( j )
Ngƣời ta chứng minh đƣợc:
Đặc tính tần số G(s) s j G( j )
10( s 3)
Thí dụ: Nếu hệ thống có hàm truyền là G( s) thì đặc tính tần số của hệ thống là
s( s 1)
10( j 3)
G( j )
j ( j 1)
Tổng quát G( j ) là một hàm phức nên có thể biểu diễn dƣới dạng đại số hoặc dạng cực:
G( j ) P( ) jQ( ) M ( ).e j ( )
Trong đó: M G j P 2 Q 2 : đáp ứng biên độ
86
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Q
G j tg 1 : đáp ứng pha
P
Đặt: L 20 lg M : đáp ứng biên độ tính theo đơn vị dB(decibel).
Ý nghĩa vật lý:
- Đáp ứng biên độ cho biết tỉ lệ về biên độ (hệ số khuếch đại) giữa tín hiệu ra và tín hiệu
vào theo tần số.
- Đáp ứng pha cho biết độ lệch pha giữa tín hiệu ra và tín hiệu vào theo tần số.
Biểu đồ Bode: là hình vẽ gồm 2 thành phần:
1. Biểu đồ Bode về biên độ: là đồ thị biểu diễn mối quan hệ giữa đáp ứng biên độ L(ω)
theo tần số ω.
2. Biểu đồ Bode về pha: là đồ thị biểu diễn mối quan hệ giữa pha φ(ω) theo tần số ω.
Cả hai đồ thị trên đều đƣợc vẽ trong hệ toạ độ vuông góc với trục hoành ω đƣợc chia theo
thang logarith (cơ số 10).
Biểu đồ Nyquist: (đƣờng cong Nyquist) là đồ thị biểu diễn đặc tính tần số G(jω) trong hệ
toạ độ cực khi ω thay đổi từ 0→∞.
Đặc tính tần số của hệ thống có các thông số quan trọng sau đây:
- Đỉnh cộng hƣởng (Mp): đỉnh cộng hƣởng là giá trị cực trị đại của M(ω)
- Tần số cộng hƣởng (ωp): là tần số tại đó có đỉnh cộng hƣởng.
- Tần số cắt biên (ωc): là tần số tại đó biên độ của đặc tính tần số bằng 1 (hay bằng
0dB)
M(ωc) = 1 Lωc) = 0
- Tần số cắt pha (ω-π): là tần số tại đó pha của đặc tính tần số bằng -π
(hay bằng -1800)
180 0 rad
- Độ dự trữ biên (GM-Gain Margin)
1
GM GM L [dB]
M
- Độ dự trữ pha (ФM-Phase Margin)
- M 180 0 c
87
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
a) Biểu đồ Bode b) Biểu đồ Nyquist
4.4.2. Tiêu chuẩn ổn định Bode:
Cho hệ thống hồi tiếp âm đơn vị, biết đặc tính tần số của hệ hở G(s), bài toán đặt ra
là xét tính ổn định của hệ thống kín Gk(s).
Tiêu chuẩn Bode: hệ thống kín Gk (s) ổn định nếu hệ thống hở G(s) có độ dự trữ
biên và độ dự trữ pha dƣơng:
GM 0
Hệ thống ổn định
M 0
Thí dụ: Cho hệ thống hồi tiếp âm đơn vị, biết rằng hệ hở có biểu đồ Bode nhƣ hình vẽ.
xác định độ dự trữ biên, độ dự trữ pha của hệ thống hở. Hỏi hệ kín có ổn định không?
88
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Theo biểu đồ Bode:
c 5
2
L 35dB
c 270 0
GM 35dB
M 180 0 270 0 90 0
Do GM 0 và M 0
Nên hệ thống kín ổn định.
4.4.3. Tiêu chuẩn ổn định Nyquist:
Cho hệ thống tự động có sơ đồ khối:
Cho biết đặc tính tần số của hệ hở G(s), bài toán đặt ra là xét tính ổn định của hệ
thống kín Gk(s).
Tiêu chuẩn Nyquist: Hệ thống kín Gk(s) ổn định nếu đƣờng cong Nyquist của hệ hở bao
l
điểm (-1, j0) vòng theo chiều dƣơng (ngƣợc chiều kim đồng hồ) khi ω thay đổi từ
2
0→+∞, trong đó l là số cực của hệ hở G(s) nằm bên phải của mặt phẳng phức.
Thí dụ 1: Cho hệ thống hồi tiếp âm đơn
vị, trong đó hệ hở G(s) có đƣờng cong
Nyquist nhƣ hình vẽ. Biết rằng G(s) ổn
định. Xét tính ổn địnhcủa hệ thống kín.
Giải:
Vì G(s) ổn định nên G(s) không có cực
nằm bên phải mặt phẳng phức, do đó theo
tiêu chuẩn Nyquist hệ kín ổn định nếu
đƣờng cong Nyquist G(jω) của hệ hở
không bao điểm (−1, j0)
- Trƣờng hợp 1: G(jω) không bao điểm (−1, j0) ⇒ hệ kín ổn định.
- Trƣờng hợp 2: G(jω) qua điểm (−1, j0) ⇒ hệ kín ở biên giới ổn định.
89
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
- Trƣờng hợp 3: G(jω) bao điểm (−1, j0) ⇒ hệ kín không ổn định.
Thí dụ 2: Hãy đánh giá tính ổn định của hệ
thống hồi tiếp âm đơn vị, biết rằng hàm
truyền hệ hở G(s) là:
K
G( s)
s(T1 s 1)(T2 s 1)(T3 s 1)
Giải:
Biểu đồ Nyquist:
Vì G(s) không có cực nằm bên phải
mặt phẳng phức, do đó theo tiêu chuẩn
Nyquist hệ kín ổn định nếu đƣờng cong
Nyquist G(jω) của hệ hở không bao điểm
(−1, j0)
- Trƣờng hợp 1: G(jω) không bao điểm (−1, j0) ⇒ hệ kín ổn định.
- Trƣờng hợp 2: G(jω) qua điểm (−1, j0) ⇒ hệ kín ở biên giới ổn định;
- Trƣờng hợp 3: G(jω) bao điểm (−1, j0) ⇒ hệ kín không ổn định
Thí dụ 3: Cho hệ thống hở không ổn định có đặc tính tần số nhƣ các hình vẽ dƣới đây.
Hỏi trƣờng hợp nào hệ kín ổn định.
Ổn định Không ổn định
Cho hệ thống hở không ổn định có đặc tính tần số nhƣ các hình vẽ dƣới đây. Hỏi
trƣờng hợp nào hệ kín ổn định.
90
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Không ổn định
Cho hệ thống hở không ổn định có đặc tính tần số nhƣ các hình vẽ dƣới đây. Hỏi
trƣờng hợp nào hệ kín ổn định.
Ổn định Không ổn định
Thí dụ 4: Cho hệ thống hở có hàm truyền đạt là: G( s)
K
K 0, T 0, n 2
(Ts 1) n
Tìm điều kiện của K và T để hệ thống kín (hồi tiêp âm đơn vị) ổn định.
Giải:
K
Đặc tính tần số của hệ thống là: G( j )
(Tj 1) n
- Biên độ: M
K
T 1
2 2
n
- Pha: ntg 1 T
Biểu đồ Nyquist:
91
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 4: Khảo sát tính ổn định
Điều kiện ổn định: đƣờng cong Nyquist không bao điểm (-1, j0). Theo biểu đồ Nyquist,
điều này xảy ra khi:
M 1
Ta có: ntg T
1
tg 1 T T tg
n n
1
tg
T n
Do đó: M 1
K
n
1
2
T 2 1 tg 1
T n
n
K tg 2 1
n
92
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
Chương 5
ĐÁNH GIÁ CHẤT LƯỢNG
HỆ THỐNG ĐIỀU KHIỂN
5.1. CÁC TIÊU CHUẨN CHẤT LƢỢNG
5.1.1. Sai số xác lập
Xét hệ thống hồi tiếp có sơ đồ khối nhƣ hình vẽ:
Sai số: là sai lệch giữa tín hiệu vào và tín hiệu hồi tiếp.
Sai số hệ thống là:
e(t ) r (t ) cht (t ) E (s) R(s) Cht (s)
- Sai số xác lập: là sai số của hệ thống khi thời gian tiến đến vô cùng.
e xl lim e(t ) exl lim sE(s)
t 0 s 0
- Sai số xác lập không những phụ thuộc vào cấu trúc và thông số của hệ thống
mà còn phụ thuộc vào tín hiệu vào.
Đáp ứng quá độ: Độ vọt lố
- Hiện tƣợng vọt lố: là hiện tƣợng đáp ứng của hệ thống vƣợt quá giá trị xác lập
của nó.
- Độ vọt lố: (Percent of Overshoot – POT) là đại lƣợng đánh giá mức độ vọt lố
của hệ thống, độ vọt lố đƣợc tính bằng công thức:
cmax c xl
POT 100%
c xl
93
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
- Thời gian quá độ (tqđ): là thời gian cần thiết để sai lệch giữa đáp ứng của hệ
thống và giá trị xác lập của nó không vƣợt quá ε%.
ε% thƣờng chọn là 2% (0.02) hoặc 5% (0.05)
- Thời gian lên (tr): là thời gian cần thiết để đáp ứng của hệ thống tăng từ 10%
đến 90% giá trị xác lập của nó.
Biều thức sai số xác lập
R( s )
Ta có: E ( s)
1 R( s ) H ( s )
sR( s)
e xl lim sE( s) lim
s 0 s 0 1 R( s ) H ( s )
Suy ra:
Nhận xét: sai số xác lập không chỉ phụ thuộc vào cấu trúc và thông số của hệ thống
mà còn phụ thuộc vào tín hiệu vào.
1
a. Tín hiệu vào là hàm nấc đơn vị: R( s) (hệ số vị trí)
s
94
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
1
e xl với K P lim G(s) H (s)
1 KP s 0
1
b. Tín hiệu vào là hàm dốc đơn vị: R( s ) (hệ số vận tốc)
s2
1
e xl KV lim G(s) H ( s)
KV s 0
1
c. Tín hiệu vào là hàm parabol: R( s) (hệ số gia tốc)
s3
1
e xl K a lim G(s) H (s)
Ka s 0
Mối liên hệ giữa số khâu tích phân trong G(s)H(s) và sai số xác lập
- Tùy theo số khâu tích phân lý tƣởng có trong hàm truyền G(s)H(s) mà các hệ số
Kp, Kv, Ka có giá trị nhƣ sau:
Số khâu tích phân Hệ số vị trí Hệ số vận tốc Hệ số gia tốc
trong G(s)H(s) KP KV Ka
0 KP < 0 0
1 KV < 0
2 Ka <
>3
Nhận xét:
- Muốn exl của hệ thống đối với tín hiệu vào là hàm nấc bằng 0 thì hàm truyền
G(s)H(s) phải có ít nhất 1 khâu tích phân lý tƣởng.
- Muốn exl của hệ thống đối với tín hiệu vào là hàm dốc bằng 0 thì hàm truyền
G(s)H(s) phải có ít nhất 2 khâu tích phân lý tƣởng.
- Muốn exl của hệ thống đối với tín hiệu vào là hàm parabol bằng 0 thì hàm truyền
G(s)H(s) phải có ít nhất 3 khâu tích phân lý tƣởng.
Đáp ứng quá độ:
Hệ quán tính bậc 1:
K
Hàm truyền hệ quán tính bậc 1: G( s)
Ts 1
1
Hệ quán tính bậc 1 có một cực thực: p1
T
1 K
C ( s) R( s)G ( s) .
Đáp ứng quá độ: s Ts 1
c(t ) K 1 e
t / T
95
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
Giản đồ cực – zero Đáp ứng quá độ
của khâu quán tính bậc 1 của khâu quán tính bậc 1
Nhận xét về hệ quán tính bậc 1:
- Hệ quán tính bậc 1 chỉ có 1 cực thực (−1/T), đáp ứng quá độ không có vọt lố.
- Thời hằng T: là thời điểm đáp ứng của khâu quán tính bậc 1 đạt 63% giá trị xác
lập.
- Cực thực (−1/T) càng nằm xa trục ảo thì thời hằng T càng nhỏ, hệ thống đáp ứng
càng nhanh.
- Thời gian quá độ của hệ quán tính bậc 1 là:
1
t qd T ln
với ε = 0.02 (tiêu chuẩn 2%) hoặ ε = 0.05 (tiêu chuẩn 5%).
Quan hệ giữa vị trí cực và đáp ứng hệ quán tính bậc 1
- Cực nằm càng xa trục ảo đáp ứng của hệ quán tính bậc 1 càng nhanh, thời gian quá
độ càng ngắn.
Giản đồ cực – zero Đáp ứng quá độ
của khâu quán tính bậc 1 của khâu quán tính bậc 1
Hệ dao động bậc 2:
Hàm truyền hệ dao động bậc 2:
96
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
K K n2 1
G( s) n ,0 1
T 2 s 2 2Ts 1 s 2 2 n s n2 T
Hệ dao động bậc 2 có cực phức: p1, 2 n j n 1 2
1 K n2
C ( s) R( s)G ( s) . 2
s s 2 n s n2
Đáp ứng quá độ:
c(t ) K 1
e nt
1 2
sin n 1 2 t cos
Giản đồ cực – zero Đáp ứng quá độ
của khâu dao động bậc 2 của khâu dao động bậc 2
Nhận xét về hệ dao động bậc 2:
Hệ quán tính bậc 1
Nhận xét về hệ quán tính bậc 1
- Hệ quán tính bậc 1 chỉ có 1 cực thực (−1/T), đáp ứng quá độ không có vọt lố.
- Thời hằng T: là thời điểm đáp ứng của khâu quán tính bậc 1 đạt 63% giá trị xác
lập.
- Cực thực (−1/T) càng nằm xa trục ảo thì thời hằng T càng nhỏ, hệ thống đáp ứng
càng nhanh.
- Thời gian quá độ của hệ quán tính bậc 1 là:
1
t qd T ln
với ε = 0.02 (tiêu chuẩn 2%) hoặc ε = 0.05 (tiêu chuẩn 5%)
Quan hệ giữa vị trí cực và đáp ứng hệ quán tính bậc 1.
97
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
- Cực nằm càng xa trục ảo đáp ứng của hệ quán tính bậc 1 càng nhanh, thời gian quá
độ càng ngắn.
Giản đồ cực – zero Đáp ứng quá độ
của khâu quán tính bậc 1 của khâu quán tính bậc 1
Hệ dao động bậc 2
Hàm truyền hệ dao động bậc 2:
K K n2 1
G( s) n ,0 1
T 2 s 2 2Ts 1 s 2 2 n s n2 T
p1, 2 n j n 1 2
- Hệ dao động bậc 2 có cặp cực phức:
- Đáp ứng quá độ:
1 K n2
C ( s) R( s)G ( s) . 2
s s 2 n s n2
c(t ) K 1
e nt
1 2
sin n 1 2 t cos
98
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
Giản đồ cực – zero Đáp ứng quá độ
của khâu dao động bậc 2 của khâu dao động bậc 2
Nhận xét về hệ dao động bậc 2
- Hệ dao động bậc 2 có cặp cực phức, đáp ứng quá độ có dạng dao động với
biên độ giảm dần.
- Nếu ξ = 0, đáp ứng của hệ là dao
động không suy giảm với tần số ωn
⇒ ωn gọi là tần số dao động tự
nhiên.
- Nếu 0< ξ <1, đáp ứng của hệ là
dao động với biên độ giảm dần ⇒
ξ gọi là hệ số tắt (hay hệ số suy
giảm), ξ càng lớn (cực càng nằm
gần trục thực) dao động suy giảm
càng nhanh.
- Nhận xét về hệ dao động bậc 2
- Đáp ứng quá độ của hệ dao động bậc 2 có vột lố:
POT exp .100%
1 2
Độ vọt lố:
99
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
ξ càng lớn (cặp cực càng nằm gần trục
thực) POT càng nhỏ.
ξ càng nhỏ (cặp cực phức càng nằm gần
trục ảo) POT càng lớn.
Thời gian quá độ:
3
Tiêu chuẩn 5%: t qd
n
4
Tiêu chuẩn 2%: t qd
n
Quan hệ giữa hệ số tắt và độ vọt lố
Quan hệ giữa vị trí cực và đáp ứng hệ dao động bậc 2.
Các hệ dao động bậc 2 có các cực nằm trên cùng 1 tia xuất phát từ góc tọa độ thì có
hệ số tắt bằng nhau, do đó có độ vọt lố bằng nhau. Hệ nào nằm xa gốc tọa độ hơn thì có
tần số dao động tự nhiên lớn hơn, do đó thời gian quá độ ngắn hơn.
Giản đồ cực – zero Đáp ứng quá độ
của khâu dao động bậc 2 của khâu dao động bậc 2
Các hệ dao động bậc 2 có các cực nằm cách gốc tọa độ một khoảng bằng nhau thì có
cùng tần số dao động tự nhiên, hệ nào có cực nằm gần trục ảo hơn thì có hệ số tắt nhỏ
hơn, do đó độ vọt lố cao hơn, thời gian quá độ dài hơn.
100
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
Giản đồ cực – zero Đáp ứng quá độ
của khâu dao động bậc 2 của khâu dao động bậc 2
Quan hệ giữa vị trí cực và đáp ứng hệ dao động bậc 2.
Các hệ dao động bậc 2 có các cực nằm cách trục ảo một khoảng bằng nhau thì có
ξωn bằng nhau, do đó thời gian quá độ bằng nhau. Hệ nào có cực nằm xa trục thực hơn thì
có hệ số tắt nhỏ hơn, do đó độ vọt lố cao hơn.
Giản đồ cực – zero Đáp ứng quá độ
của khâu dao động bậc 2 của khâu dao động bậc 2
Hệ bậc cao
Hệ bậc cao có nhiều hơn 2 cực
Nếu hệ bậc cao có 1 cặp cực phức nằm gần trục ảo hơn so với các cực còn lại thì có
thể xấp xỉ hệ bậc cao về hệ bậc 2. Cặp cực phức nằm gần trục ảo nhất gọi là cặp cực quyết
định của hệ bậc cao.
101
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
Hệ bậc cao có nhiều hơn 2 cực Hệ bậc cao có thể xấp xỉ về hệ
bậc 2 với cặp cực quyết định
Cácc tiêu chuẩn tối ƣu hóa đáp ứng quá độ
Tiêu chuẩn IAE (Integral of the Absolute Magnitude of the Error )
J IAE e(t ) dt
0
Tiêu chuẩn ISE (Integral of the Square of the Error)
J ISE e 2 (t )dt
0
Tiêu chuẩn ITAE (Integral of Time multiplied by the Absolute Value of the Error)
J ITAE t e(t ) dt
0
Hệ bậc 2:
J IAE min 0.707
J ISE min 0.5
J ITAE min 0.707
Đáp ứng của hệ bậc 2
Tiêu chuẩn ITAE đƣợc sử dụng phổ biến nhất
- Để đáp ứng quá độ của hệ thống bậc n là tối ƣu theo chuẩn ITAE thì mẫu số hàm
truyền kín hệ bậc n phải có dạng.
Bậc Mẫu số hàm truyền
102
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 5: Đánh giá chất lượng hệ thống điều khiển
1 s n
2 s 2 1.414n s n2
3 s 3 1.75n s 2 2.15n2 s n3
4 s 4 2.1n s 3 3.4n2 s 2 2.7n3 s n4
- Nếu mẫu số hàm truyền hệ kín có dạng nhƣ bảng trên và tử số hàm truyền hệ kín
của hệ bậc n là thì đáp ứng quá độ của hệ thống là tối ƣu và sai số xác lập bằng 0.
Các tiêu chuẩn tối ƣu hóa đáp ứng quá độ
- Đáp ứng tối ƣu theo chuẩn ITAE
103
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Chương 6
THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC
6.1. KHÁI NIỆM
Thiết kế là toàn bộ quá trình bổ sung các thiết bị phần cứng cũng nhƣ thuật toán
phần mềm vào hệ cho trƣớc để đƣợc hệ mới thỏa mãn yêu cầu về tính ổn định, độ chính
xác, đáp ứng quá độ,… Có nhiều cách bổ sung bộ điều khiển vào hệ thống cho trƣớc,
trong khuôn khổ quyển giáo trình này chúng ta chủ yếu xét hai cách sau:
• Cách 1: thêm bộ điều khiển nối tiếp với hàm truyền của hệ hở, phƣơng pháp này gọi là
hiệu chỉnh nối tiếp. Bộ điều khiển đƣợc sử dụng có thể là bộ hiệu chỉnh sớm pha, trễ pha,
sớm trễ pha,P, PD, PI, PID,… Để thiết kế hệ thống hiệu chỉnh nối tiếp chúng ta có thể sử
dụng phƣơng pháp QĐNS hay phƣơng pháp biểu đồ Bode. Ngoài ra một phƣơng pháp
cũng thƣờng đƣợc sử dụng là thiết kế theo đặc tính quá độ chuẩn.
Hình 6.1. Hệ thống hiệu chỉnh nối tiếp
• Cách 2: điều khiển hồi tiếp trạng thái, theo phƣơng pháp này tất cả các trạng thái của
hệ thống đƣợc phản hồi trở về ngõ vào và tín hiệu điều khiển có dạng u(t ) r (t ) Kx(t ) .
Tùy theo cách tính vector hồi tiếp trạng thái K mà tacó phƣơng pháp điều khiển phân bố
cực, điều khiển tối ƣu LQR,….
Hình 6.2. Hệ thống điều khiển hồi tiếp trạng thái
Quá trình thiết kế hệ thống là quá trình đòi hỏi tính sáng tạo do trong khi thiết kế
thƣờng có nhiều thông số phải chọn lựa. Ngƣời thiết kế cần thiết phải hiểu đƣợc ảnh
hƣởng của các khâu hiệu chỉnh đến chất lƣợng của hệ thống và bản chất của từng phƣơng
pháp thiết kế thì mới có thể thiết kế đƣợc hệ thống có chất lƣợng tốt. Do đó các phƣơng
pháp thiết kế trình bày trong chƣơng này chỉ mang tính gợi ý, đó là những cách thƣờng
đƣợc sử dụng chứ không phải là phƣơng pháp bắt buộc phải tuân theo. Việc áp dụng một
104
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
cách máy móc thƣờng không đạt đƣợc kết quả mong muốn trong thực tế. Dù thiết kế theo
phƣơng pháp nào yêu cầu cuối cùng vẫn là thỏa mãn chất lƣợng mong muốn, cách thiết
kế, cách chọn lựa thông số không quan trọng.
Trƣớc khi xét đến các phƣơng pháp thiết kế bộ điều khiển, chúng ta xét ảnh hƣởng
của các bộ điều khiển đến chất lƣợng của hệ thống. Chƣơng này chỉ trình bày bộ điều
khiển dƣới dạng mô tả toán học, mạch điều khiển cụ thể xem lại chƣơng 2.
6.2. ẢNH HƢỞNG CỦA CÁC BỘ ĐIỀU KHIỂN ĐẾN CHẤT LƢỢNG CỦA HỆ
THỐNG
6.2.1. Ảnh hƣởng của cực và zero
Trong mục này chúng ta khảo sát ảnh hƣởng của việc thêm cực và zero vào hệ thống
bằng cách dựa vào quỹ đạo nghiệm số. Ta thấy:
• Khi thêm 1 cực có phần thực âm vào hàm truyền hệ hở thì QĐNS của hệ kín có xu
hƣớng tiến gần về phía trục ảo (xem hình 6.3), hệ thống sẽ kém ổn định hơn, độ dự trữ
biên và độ dự trữ pha giảm, độ vọt lố tăng.
Hình 6.3. Sự thay đổi dạng QĐNS khi thêm cực vào hệ thống
• Khi thêm 1 zero có phần thực âm vào hàm truyền hệ hở thì QĐNS của hệ kín có xu
hƣớng tiến xa trục ảo (xem hình 6.4), do đó hệ thống sẽ ổn định hơn, độ dự trữ biên và độ
dự trữ pha tăng, độ vọt lố giảm.
Hình 6.4. Sự thay đổi dạng QĐNS khi thêm cực vào hệ thống
6.2.2. Ảnh hƣởng của hiệu chỉnh sớm trễ pha
6.2.2.1. Hiệu chỉnh sớm pha:
1 aTs
Hàm truyền: Gc ( s) ( 1) (6.1)
1 Ts
105
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1 aTj
Đặc tính tần số: Gc ( j ) ( 1)
1 Tj
Hình 6.5 là biểu đồ Bode của khâu hiệu chỉnh sớm pha. Dựa vào biểu đồ Bode của
khâu sớm pha chúng ta thấy đặc tính pha luôn dƣơng ( 0, ), do đó tín hiệu ra
luôn luôn sớm pha hơn tín hiệu vào. Khâu hiệu chỉnh sớm pha là một bộ lọc thông cao
(xem biểu đồ Bode biên độ), sử dụng khâu hiệu chỉnh sớm pha sẽ mở rộng đƣợc băng
thông của hệ thống, làm cho đáp ứng của hệ thống nhanh hơn, do đó khâu hiệu chỉnh sớm
pha cải thiện đáp ứng quá độ. Tuy nhiên cũng do tác dụng mở rộng băng thông mà khâu
hiệu chỉnh sớm pha làm cho hệ thống nhạy với nhiễu tần số cao.
Hình 6.5. Bieåu ñoà Bode cuûa khaâu hieäu chænh sôùm pha
Các thông số cần chú ý trên đặc tính tần số của khâu sớm pha:
• Độ lệch pha cực đại:
1
max sin 1 (6.2)
1
• Tần số tại đó độ lệch pha cực đại:
1
max (6.3)
T
• Biên độ tại pha cực đại:
Lmax 10 lg (6.4)
Chứng minh:
106
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1 j T 1 jT 1 jT
arg arg
1 jT 1 T 2 2
T 1
arg 1 T 2 2 jT 1 arctan
1 T
2 2
T 1 1 1
arctan arctan arcsin
2 T 2
1
1
Do đó: max arcsin
1
Dấu đẳng thức xảy ra khi: 1 T 2 2 max max 1 / T
Thay max 1 / T vào biểu thức biên độ của khâu sớm pha ta dễ dàng rút ra công
thức (6.4).
6.2.2.2. Hiệu chỉnh trễ pha:
1 aTs
Hàm truyền: Gc ( s) ( 1) (6.5)
1 Ts
1 aTj
Đặc tính tần số: Gc ( j )
1 Tj
Hình 6.6 là biểu đồ Bode của khâu hiệu chỉnh trễ pha. Dựa vào biểu đồ Bode của
khâu trễ pha ta thấy đặc tính pha luôn âm ( ( ) 0, ) nên tín hiệu ra luôn luôn trễ pha
hơn tín hiệu vào. Khâu hiệu chỉnh trễ pha là một bộ lọc thông thấp (xem biểu đồ Bode
biên độ), sử dụng khâu hiệu chỉnh trễ pha sẽ thu hẹp băng thông của hệ thống, làm cho hệ
số khuếch đại của hệ thống đối với tín hiệu vào tần số cao giảm đi, do đó khâu hiệu chỉnh
trễ pha không có tác dụng cải thiện đáp ứng quá độ. Tuy nhiên cũng do tác dụng làm giảm
hệ số khuếch đại ở miền tần số cao mà khâu trễ pha có tác dụng lọc nhiễu tần số cao ảnh
hƣởng đến hệ thống. Do hệ số khuếch đại ở miền tần số thấp lớn nên khâu hiệu chỉnh trễ
pha làm giảm sai số xác lập của hệ thống (xem biểu thức sai số xác lập đã trình bày ở
chƣơng 5).
Các thông số cần chú ý trên đặc tính tần số của khâu trễ pha:
• Độ lệch pha cực tiểu:
1
min sin 1 (6.6)
1
• Tần số tại đó độ lệch pha cực tiểu:
1
min (6.7)
T
• Biên độ tại pha cực tiểu:
Lmin 10 lg (6.8)
Chứng minh: Tƣơng tự nhƣ đã làm đối với khâu sớm pha.
107
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.6. Biểu đồ Bode của khâu hiệu chỉnh trễ pha
6.2.2.3 Hiệu chỉnh sớm trễ pha:
Khâu hiệu chỉnh sớm trễ pha gồm một khâu trễ pha mắc nối tiếp với một khâu sớm
pha. Hàm truyền của khâu hiệu chỉnh sớm trễ có thể viết dƣới dạng:
1 1T1s 1 2T2 s
GC ( s) GC1 ( s).GC 2 ( s) (6.9)
1 T1s 1 T2 s
Để biểu thức (6.9) là hàm truyền của khâu sớm trễ pha thì các thông số phải thỏa
điều kiện: 1 1, 2 1, 1 / 1T1 1 / 2T2 .
Đặc tính tần số của khâu sớm trễ pha:
1 1T1 j 1 2T2 j
Gc j (6.10)
1 T1 j 1 T2 j
Hình 6.7. Biểu đồ Bode của khâu hiệu chỉnh sớm trễ pha
108
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.7 là biểu đồ Bode của khâu hiệu chỉnh sớm trễ pha. Ở miền tần số cao tín
hiệu ra sớm pha hơn tín hiệu vào; ở miền tần số thấp tín hiệu ra trễ pha hơn tín hiệu vào
nên khâu hiệu chỉnh này đƣợc gọi là khâu hiệu chỉnh sớm trễ pha. Khâu hiệu chỉnh sớm
trễ pha là một bộ lọc chắn dãi (xem biểu đồ Bode biên độ), hệ số khuếch đại ở miền tần số
cao lớn làm cải thiện ứng quá độ; hệ số khuếch đại ở miền tần số thấp lớn làm giảm sai số
xác lập, do đó khâu hiệu chỉnh sớm trễ pha kết hợp các ƣu điểm của khâu hiệu chỉnh sớm
pha và trễ pha.
6.2.3. Hiệu chỉnh PID
6.2.3.1 Hiệu chỉnh tỉ lệ P: (Proportional)
Hàm truyền: Gc (s) K P (6.11)
Đặc tính tần số của khâu hiệu chỉnh tỉ lệ đã đƣợc trình bày ở chƣơng 2. Dựa vào các
biểu thức sai số xác lập đã trình bày ở chƣơng 4 ta thấy nếu hệ số khuếch đại KP càng lớn
thì sai số xác lập càng nhỏ, tuy nhiên khi KP tăng thì các cực của hệ thống nói chung có
xu hƣớng di chuyển xa ra trục thực, điều đó có nghĩa là đáp ứng của hệ thống càng dao
động, độ vọt lố càng cao. Nếu KP tăng quá giá trị hệ số khuếch đại giới hạn thì hệ thống sẽ
trở nên mất ổn định. Do đó không thể muốn sai số của hệ thống bằng 0 thì không thể tăng
hệ số khuếch đại lên vô cùng.
Thí dụ 6.1: Khảo sát ảnh hưởng của bộ điều khiển tỉ lệ.
Xét hệ thống hiệu chỉnh nối tiếp có sơ đồ khối nhƣ hình 6.1, trong đó hàm truyền
10
của đối tƣợng là: G( s) . Bộ điều khiển đƣợc sử dụng là bộ điều khiển tỉ lệ.
( s 2)(s 3)
Đƣờng liền nét trong hình 6.8 là đáp ứng của hệ thống khi chƣa hiệu chỉnh KP = 1. Theo
hình vẽ ta thấy khi tăng KP thì sai số xác lập giảm, đồng thời độ vọt lố cũng tăng lên (các
đƣờng đứt nét).
Hình 6.8. Đáp ứng nấc của hệ thống kín khi thay đổi hệ số khuếch đại của bộ điều khiển tỉ lệ
6.2.3.2 Hiệu chỉnh vi phân tỉ lệ PD: (Proportional Derivative)
Hàm truyền: GC (s) K P K D s K P (1 TD s) (6.12)
trong đó K D K PTD , TD đƣợc gọi là thời hằng vi phân của bộ điều khiển PD.
Đặc tính tần số: GC ( j) K P K D j K P (1 jTD ) (6.13)
109
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.9. Biểu đồ Bode của khâu hiệu chỉnh PD
Mắc nối tiếp khâu hiệu chỉnh PD với hàm truyền của đối tƣợng tƣơng đƣơng với
việc thêm vào hệ thống một zero tại vị trí –1/TD. Nhƣ đã trình bày ở mục 6.2.1, việc thêm
vào hệ thống một zero làm cho QĐNS có xu hƣớng rời xa trục ảo và tiến gần về phía trục
thực, do đó làm giảm độ vọt lố của hệ thống.
Hình 6.9 là đặc tính tần số của khâu hiệu chỉnh PD. Dựa vào biểu đồ Bode của khâu
hiệu chỉnh PD ta thấy khâu hiệu chỉnh PD là một trƣờng hợp riêng của khâu hiệu chỉnh
sớm pha, trong đó độ lệch pha cực đại giữa tín hiệu ra và tín hiệu vào là max 900 , tƣơng
ứng với tần số max . Khâu hiệu chỉnh PD có đặc điểm của khâu hiệu chỉnh sớm pha,
nghĩa là làm nhanh đáp ứng của hệ thống, giảm thời gian quá độ. Tuy nhiên do hệ số
khuếch đại ở tần số cao của khâu hiệu chỉnh PD là vô cùng lớn nên khâu hiệu chỉnh PD là
làm cho hệ thống rất nhạy với nhiễu tần số cao. Do đó xét về ảnh hƣởng của nhiễu tần số
cao thì khâu hiệu chỉnh sớm pha có ƣu thế hơn khâu hiệu chỉnh PD.
Thí dụ 6.2: Khảo sát ảnh hưởng của bộ điều khiển vi phân tỉ lệ.
Xét hệ thống hiệu chỉnh nối tiếp có sơ đồ khối nhƣ hình 6.1, trong đó hàm truyền
K
của đối tƣợng là: G( s) (a b 0) . Bộ điều khiển đƣợc sử dụng là bộ điều
( s a)(s b)
khiển vi phân tỉ lệ. Phƣơng trình đặc tính của hệ thống sau khi hiệu chỉnh là:
K
1 K P (1 TD s) 0
( s a)( s b)
Ảnh hưởng đặc trưng của khâu PD quyết định bởi thời hằng vi phân TD (cũng chính là vị
trí zero –1/TD trên QĐNS hay tần số gãy 1/TD trên đặc tính tần số). Tùy theo giá trị của TD
mà QĐNS của hệ thống sau khi hiệu chỉnh có thể có các dạng nhƣ hình 6.10.
110
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.10. Sự thay đổi dạng QĐNS khi thêm khâu hiệu chỉnh PD vào hệ thống
Ta thấy nếu 0 < 1/TD < a thì QĐNS của hệ thống sau khi hiệu chỉnh nằm hoàn toàn
trên trục thực (hình 6.10b và 6.10c), do đó đáp ứng của hệ thống hoàn toàn không có dao
động. Nếu 1/TD > a thì tùy giá trị của KP mà hệ thống có thể có nghiệm phức, tuy nhiên
nghiệm phức này gần trục thực hơn so với trục ảo (nghĩa là ξ>0.707), do đó độ vọt lố của
hệ thống thấp hơn so với chƣa hiệu chỉnh.
Hình 6.11a trình bày đáp ứng quá độ của hệ thống khi thay đổi giá trị TD và giữ hệ số
KP bằng hằng số. Ta thấy TD càng lớn thì đáp ứng càng nhanh, thời gian lên càng ngắn.
Tuy nhiên nếu thời gian lên nhanh quá thì sẽ dẫn đến vọt lố mặt dù đáp ứng không có dao
động.
Khi đã xác định đƣợc TD thì ảnh hƣởng của KP tƣơng tự nhƣ ảnh hƣởng của khâu
khuếch đại, nghĩa là nếu KP càng tăng (nhƣng phải nhỏ hơn Kgh) thì sai số xác lập càng
giảm (hình 6.11b), tuy nhiên sai số xác lập lúc nào cũng khác 0. Mặt khác trong trƣờng
hợp hệ thống đang khảo sát, khi KP càng tăng thì QĐNS càng rời xa trục ảo nên thời gian
đáp ứng cũng nhanh lên. Tuy nhiên ảnh hƣởng này không phải là ảnh hƣởng đặc trƣng
của khâu PD.
111
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.11. Ảnh hưởng của khâu hiệu chỉnh PD đến đáp ứng nấc đơn vị của hệ thống
6.2.3.3 Hiệu chỉnh tích phân tỉ lệ PI: (Proportional Integral)
K1 1
Hàm truyền: GC ( s) K P K P 1 (6.14)
s T1s
trong đó K I K P / TI , TI đƣợc gọi là thời hằng tích phân của bộ điều khiển PI.
1
Đặc tính tần số: GC ( j ) K P 1 (6.15)
TI j
Mắc nối tiếp khâu hiệu chỉnh PI với hàm truyền của đối tƣợng tƣơng đƣơng với việc
thêm vào hệ thống một zero tại vị trí –1/TI và một cực tại góc tọa độ, điều này làm cho
QĐNS của hệ thống sau khi hiệu chỉnh bị đẩy về phía phải mặt phẳng phức, nên hệ thống
kém ổn định hơn .
Hình 6.12. Biểu đồ Bode của khâu hiệu chỉnh PI
Hình 6.12 là biểu đồ Bode của khâu hiệu chỉnh PI. Dựa vào biểu đồ Bode của khâu
hiệu chỉnh PI ta thấy khâu hiệu chỉnh PI là một trƣờng hợp riêng của khâu hiệu chỉnh trễ
pha, trong đó độ lệch pha cực tiểu giữa tín hiệu ra và tín hiệu vào là min 900 tƣơng ứng
112
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
với tần số min 0 . Khâu hiệu chỉnh PI có đặc điểm của khâu hiệu chỉnh trễ pha, nghĩa là
làm chậm đáp ứng quá độ, tăng độ vọt lố, giảm sai số xác lập. Do hệ số khuếch đại của
khâu PI bằng vô cùng tại tần số bằng 0 nên khâu hiệu chỉnh PI làm cho sai số đối với tín
hiệu vào là hàm nấc của hệ thống không có khâu vi phân lý tƣởng bằng 0 (hệ vô sai bậc
1). Ngoài ra do khâu PI là một bộ lọc thông thấp nên nó còn có tác dụng triệt tiêu nhiễu
tần số cao tác động vào hệ thống.
Thí dụ 6.3: Khảo sát ảnh hưởng của bộ điều khiển tích phân tỉ lệ.
Xét hệ thống hiệu chỉnh nối tiếp có sơ đồ khối nhƣ hình 6.1, trong đó hàm truyền
K
của đối tƣợng là: G( s) (a b 0) Bộ điều khiển đƣợc sử dụng là bộ điều
( s a)(s b)
khiển tích phân tỉ lệ. Phƣơng trình đặc tính của hệ thống sau khi hiệu chỉnh là:
1 TI s K
1 K P 0
TI s ( s a)( s b)
Ảnh hưởng đặc trưng của khâu PI quyết định bởi thời hằng tích phân TI (cũng chính là vị
trí zero –1/TI trên QĐNS hay tần số gãy 1/TI trên đặc tính tần số). Tùy theo giá trị của TI
mà QĐNS của hệ thống sau khi hiệu chỉnh có thể có các dạng nhƣ hình 6.13.
c) Chưa hiệu chỉnh d) Đã hiệu chỉnh
Hình 6.13: Sự thay đổi dạng QĐNS khi thêm khâu hiệu chỉnh PI vào hệ thống
113
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Theo công thức sai số (5.xx), ta thấy khâu hiệu chỉnh PI làm cho sai số xác lập của
hệ thống đối với tín hiệu vào là hàm nấc bằng 0. Tuy nhiên khâu hiệu chỉnh PI làm cho hệ
thống kém ổn định. Ta có thể kiểm chứng đƣợc điều này bằng cách phân tích sự thay đổi
dạng QĐNS của hệ thống sau khi hiệu chỉnh. Theo công thức (4.xx), giao điểm của tiệm
cận với trục thực là: OA =(-a –b+ 1/TI ) . Do đó khi 1/TI càng tăng thì QĐNS của hệ
thống càng di chuyển về phía phải mặt phẳng phức (hình 6.13b, 6.13c), hệ thống càng
kém ổn định. Khi 1/TI đủ lớn thỏa điều kiện 1/TI > a+ b thì QĐNS có đoạn nằm bên phải
mặt phẳng phức(hình 6.13d), hệ thống không ổn định nếu hệ số khuếch đại của hệ thống
lớn hơn giá trị Kgh.
Hình 6.14 minh họa đáp ứng quá độ của hệ thống khi thay đổi thông số của bộ điều
khiển PI. Ở hình 6.14a ta thấy khi càng giảm thời hằng tích phân TI thì độ vọt lố của hệ
thống càng cao, hệ thống càng chậm xác lập. Từ đây ta rút ra kết luận khi thiết kế khâu
hiệu chỉnh PI nên chọn zero –1/TI nằm gần gốc tọa độ để thời hằng tích phân TI có giá trị
lớn nhằm hạn chế độ vọt lố. Khi giữ TI bằng hằng số thì ảnh hƣởng của KP đến chất lƣợng
của hệ thống chính là ảnh hƣởng của khâu khếch đại, KP càng tăng thì độ vọt lố càng tăng,
tuy nhiên thời gian quá độ gần nhƣ không đổi (hình 6.14b). Nếu KP vƣợt quá giá trị hệ số
khuếch đại giới hạn thì hệ thống trở nên mất ổn định.
Hình 6.14. Ảnh hưởng của khâu hiệu chỉnh PI đến đáp ứng nấc đơn vị của hệ thống
6.2.3.4 Hiệu chỉnh vi tích phân tỉ lệ PID: (Proportional Integral Derivative)
KI
Hàm truyền: GC ( s) K P KDs (6.16)
s
Có thể xem khâu hiệu chỉnh PID gồm một khâu PI mắc nối tiếp với một khâu PD.
1
GC ( s) K P1 1 1 K D 2 s (6.17)
TI 1s
trong đó TI1 > TD2. Dễ dàng suy ra đƣợc mối quan hệ giữa các hệ số trong hai cách biểu
diễn (6.16) và (6.17) nhƣ sau:
K P K P1 (1 TD 2 / TI 1 ) (6.18)
K I K I 1 / TI 1 (6.19)
K D K P1TD 2 (6.20)
Đặc tính tần số:
114
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1
GC ( j ) K P1 1 1 K D 2 j (6.21)
TI1 j
Hình 6.15. Biểu đồ Bode của khâu hiệu chỉnh PID
Khâu hiệu chỉnh PID là một trƣờng hợp riêng của hiệu chỉnh sớm trễ pha, trong đó
độ lệch pha cực tiểu giữa tín hiệu ra và tín hiệu vào là min 900 , tƣơng ứng với tần
số min 0 ; độ lệch pha cực đại giữa tín hiệu ra và tín hiệu vào là max 900 , tƣơng ứng
với tần số max .
Do khâu hiệu chỉnh PID có thể xem là khâu PI mắc nối tiếp với khâu PD nên nó có
các ƣu điểm của khâu PI và PD. Nghĩa là khâu hiệu chỉnh PID cải thiện đáp ứng quá độ
(giảm vọt lố, giảm thời gian quá độ) và giảm sai số xác lập (nếu đối tƣợng không có khâu
vi phân lý tƣởng thì sai số xác lập đối với tín hiệu vào là hàm nấc bằng 0).
Chúng ta vừa khảo sát xong ảnh hƣởng của các khâu hiệu chỉnh nối tiếp thƣờng
dùng đến chất lƣợng của hệ thống, mỗi khâu hiệu chỉnh có những ƣu điểm cũng nhƣ
khuyết điểm riêng. Do vậy cần phải hiểu rõ đặc điểm của từng khâu hiệu chỉnh chúng ta
mới có thể sử dụng linh hoạt và hiệu quả đƣợc. Tùy theo đặc điểm của từng đối tƣợng
điều khiển cụ thể và yêu cầu chất lƣợng mong muốn mà chúng ta phải sử dụng khâu hiệu
chỉnh thích hợp. Khi đã xác định đƣợc khâu hiệu chỉnh cần dùng thì vấn đề còn lại là xác
định thông số của nó. Các mục tiếp sẽ đề cập đến vấn đề này.
6.3. THIẾT KẾ HỆ THỐNG DÙNG PHƢƠNG PHÁP QĐNS
Nguyên tắc thiết kế hệ thống dùng phƣơng pháp QĐNS là dựa vào phƣơng trình đặc
tính của hệ thống sau khi hiệu chỉnh:
1 GC (s)G(s) 0 (6.22)
115
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
GC ( s)G ( s) 1 điều kiện biên độ (6.23)
điều kiện pha
GC ( s)G ( s) 180
0
Ta cần chọn thông số của bộ điều khiển GC(s) sao cho phƣơng trình (6.22) có
nghiệm tại vị trí mong muốn.
6.3.1 Hiệu chỉnh sớm pha
Để thuận lợi cho việc vẽ QĐNS chúng ta biểu diễn hàm truyền khâu hiệu chỉnh sớm
pha dƣới dạng sau (so sánh với biểu thức (6.1)):
s 1 / T
GC ( s) K C 1 (6.24)
s 1 / T
Bài toán đặt ra là chọn giá trị KC, va T để đáp ứng của hệ thống thỏa mãn yêu cầu
về chất lƣợng quá độ (độ vọt lố, thời gian xác lập,…)
Ta đã biết chất lƣợng quá độ của hệ thống hoàn toàn xác định bởi vị trí của cặp cực
quyết định. Do đó nguyên tắc thiết kế khâu hiệu chỉnh sớm pha dùng phƣơng pháp QĐNS
là chọn cực và zero của khâu hiệu chỉnh sao cho QĐNS của hệ thống sau khi hiệu chỉnh
phải đi qua cặp cực quyết định mong muốn. Sau đó bằng cách chọn hệ số khuếch đại KC
thích hợp ta sẽ chọn đƣợc cực của hệ thống chính là cặp cực mong muốn. Nguyên tắc trên
đƣợc cụ thể hóa thành trình tự thiết kế sau:
TRÌNH TỰ THIẾT KẾ
Khâu hiệu chỉnh : Sớm pha
Phương pháp thiết kế : QĐNS
Bước 1: Xác định cặp cực quyết định từ yêu cầu thiết kế về chất lƣợng của hệ thống
trong quá trình quá độ:
Đo vot lo
s1*, 2 n jn 1 2
Thoi gian qua do
Bước 2: Xác định góc pha cần bù để cặp cực quyết định s1*, 2 nằm trên QĐNS của hệ
thống sau khi hiệu chỉnh bằng công thức:
* 1800 arg s1* pi arg s1* zi
n m
(6.25)
i 1 i 1
trong đó pi và zi là các cực của hệ thống G(s) trƣớc khi hiệu chỉnh.
Dạng hình học của công thức trên là:
* 1800 góc từ các cực củaG(s) đến cực s1*
- góc từ các zero củaG(s) đến cực s1* (6.26)
Bước 3: Xác định vị trí cực và zero của khâu hiệu chỉnh
Vẽ 2 nữa đƣờng thẳng bất kỳ xuất phát từ cực quyết định s * sao cho 2 nữa đƣờng
thẳng này tạo với nhau một góc bằng * . Giao điểm của hai nữa đƣờng thẳng này với trục
thực là vị trí cực và zero của khâu hiệu chỉnh.
Có hai cách vẽ thƣờng dùng:
116
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
- PP đƣờng phân giác (để cực và zero của khâu hiệu chỉnh gần nhau)
- PP triệt tiêu nghiệm (để hạ bậc của hệ thống)
Bước 4: Tính hệ số khuếch đại KC bằng cách áp dụng công thức:
GC (s)G(s) ss* 1
1
Giải thích:
Bước 1: Do chất lƣợng quá độ phụ thuộc vào vị trí cặp cực quyết định nên để thiết kế hệ
thống thỏa mãn chất lƣợng quá độ mong muốn ta phải xác định cặp cực quyết định tƣơng
ứng. Gọi cặp cực quyết định mong muốn là s1*, 2 .
Bước 2: Để hệ thống có chất lƣợng quá độ nhƣ mong muốn thì cặp cực quyết định s1*, 2
phải là nghiệm của phƣơng trình đặc tính sau khi hiệu chỉnh (6.22).
Xét điều kiện về pha:
GC (s)G(s) s s* 1800
GC (s) s s* G(s) s s* 1800
m
n
GC ( s) s s* arg s * zi arg s * pi 1800 (6.27)
i 1 i 1
Trong đó zi và pi là các zero và các cực của hệ thống hở trƣớc khi hiệu chỉnh. Đặt góc
pha cần bù * GC (s) ss , từ biểu thức (6.27) ta suy ra:
*
* 1800 arg s* pi arg s * zi
n m
i 1 i 1
Do số phức có thể biểu diễn dƣới dạng vector nên công thức trên tƣơng đƣơng với
công thức hình học sau:
* 1800 góc từ các cực củaG(s) đến cực s
góc từ các zero củaG(s) đến cực s
-
Bước 3: Bây giờ ta phải chọn cực và zero của khâu hiệu chỉnh sau cho:
* GC (s) ss *
args 1 / T args* 1 / T `
* *
(6.28)
Do và s đã biết nên phƣơng trình (6.28) có hai ẩn số cần tìm là 1/ T và 1/T.
* *
Chọn trƣớc giá trị 1/ T bất kỳ thay vào phƣơng trình (6.28) ta sẽ tính đƣợc 1/T và ngƣợc
lại, nghĩa là bài toán thiết kế có vô số nghiệm.
Thay vì chọn nghiệm bằng phƣơng pháp giải tích (giải phƣơng trình (6.28)) nhƣ vừa
trình bày chúng ta có thể chọn bằng phƣơng pháp hình học. Theo hình vẽ 6.16 hai số phức
s* 1/ T ; s* 1/ T đƣợc biểu diễn bởi hai vector BP và CP ,
do đó args* 1 / T PBˆ O; args* 1 / T PCˆO .
Thay các góc hình học vào phƣơng trình (6.28) ta đƣợc:
* args* 1 / T args* 1 / T PCˆ O PBˆ O BPˆ C .
117
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Từ phân tích trên ta thấy cực và zero của khâu hiệu chỉnh sớm pha phải nằm tại điểm
B và C sao cho BPˆ C * . Đây chính là cơ sở toán học của cách chọn cực và zero nhƣ đã
trình bày trong trình tự thiết kế.
Hình 6.16: Quan hệ hình học giữa vị trí cực và zero của khâu hiệu chỉnh sớm pha với góc
pha cần bù
Bước 4: Muốn s là nghiệm của phƣơng trình đặc tính (6.22) thì ngoài điều kiện về pha ta
*
phải chọn KC sao cho s * thỏa điều kiện biên độ. Do đó ta phải chọn KC bằng công thức:
GC (s)G(s) ss* 1
Thí dụ 6.4: Thiết kế khâu hiệu chỉnh sớm pha dùng phương pháp QĐNS.
Cho hệ thống điều khiển nhƣ hình vẽ. Hãy thiết kế khâu hiệu chỉnh GC(s) để đáp
ứng quá độ của hệ thống sau khi hiệu chỉnh thỏa: POT<20%; tqđ < 0,5 sec (tiêu chuẩn
2%).
Lời giải:
Vì yêu cầu thiết kế cải thiện đáp ứng quá độ nên sử dụng khâu hiệu chỉnh sớm pha:
s (1 / T )
GC ( s) K C 1
s (1 / T )
Bước 1: Xác định cặp cực quyết định
Theo yêu cầu thiết kế, ta có:
• POT exp 0.2 ln 0.2 1.6
2
1 1 2
1,95 1 2 4.8 2 1 0.45
Chọn 7.707
4 4
• t qd 0.5 n n 11.4
n 0.5
Chọn n 15
118
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Vậy cặp cực quyết định là:
s1*, 2 n jn 1 2 0.707 15 j15 1 0.707 2
s1*, 2 10.5 10.5
Bước 2: Xác định góc pha cần bù
Cách 1. Dùng công thức đại số
* 1800 arg 10.5 j10.5 0 arg 10.5 j10.5 (5)
10.5 10.5
1800 arctan arctan
10.5 5.5
1800 135 117.6
* 72.60
Cách 2. Dùng công thức hình học
* 1800 1 2
1800 1350 117.60 72.60
Bước 3: Xác định cực và zero của khâu hiệu chỉnh bằng phƣơng pháp đƣờng
phân giác.
- Vẽ PA là phân giác của góc OPˆ x
* *
- Vẽ PB và PC sao cho APˆ B , APˆ C
2 2
Điểm B chính là vị trí cực và C là vị trí zero của khâu hiệu chỉnh.
1 1
OB OC
T T
Áp dụng hệ thức lƣợng trong tam giác ta suy ra:
OPˆ x * 1350 72.60
sin
sin
2 2 2 2
° OB OP 15 28.12
OPˆ x * 1350 72.60
sin sin
2 2 2 2
119
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
OPˆ x * 135 0 72.6 0
sin sin
2 2 2 2
° OC OP 15 8.0
OPˆ x * 135 0 72.6 0
sin sin
2 2 2 2
s 8
GC ( s) K C
s 28
Bước 4: Tính K . C
GC (s)G(s) s s* 1
s 8 50
KC . 1
s 28 s ( s 5) s 10.5 j10.5
10.5 j10.5 8 50
KC .
10.5 j10.5 28 (10.5 j10.5)(10.5 j10.5 5)
10.79 50
KC 1
20.41 15 11.85
K C 6.7
Vậy hàm truyền của khâu hiệu chỉnh sớm pha cần thiết kế là:
s 8
GC ( s) 6.7
s 28
Nhận xét:
Quỹ đạo nghiệm số của hệ thống trƣớc khi hiệu chỉnh không qua điểm s* (hình
6.17a) do đó hệ thống sẽ không bao giờ đạt đƣợc chất lƣợng đáp ứng quá độ nhƣ yêu cầu
dù có thay đổi hệ số khuếch đại của hệ thống.
Bằng cách sử dụng khâu hiệu chỉnh sớm pha, quỹ đạo nghiệm số của hệ thống bị sửa
dạng và qua điểm s* (hình 6.17b). Bằng cách chọn hệ số khuếch đại thích hợp (nhƣ đã
thực hiện ở bƣớc 4) hệ thống sẽ có cặp cực quyết định nhƣ mong muốn, do đó đáp ứng
quá độ đạt yêu cầu thiết kế (hình 6.18).
120
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.17. Sự thay đổi dạng QĐNS khi hiệu chỉnh sớm pha
Hình 6.18. Đáp ứng nấc của hệ thống ở thí dụ 6.4 trước và sau khi hiệu chỉnh
6.3.2 Hiệu chỉnh trễ pha
Hàm truyền khâu hiệu chỉnh trễ pha cần thiết kế có dạng:
s (1 / T )
GC ( s) K C 1
s (1 / T )
Bài toán đặt ra là chọn giá trị KC, và T để đáp ứng của hệ thống thỏa mãn yêu cầu
về sai số xác lập mà “không” làm ảnh hƣởng đến đáp ứng quá độ (ảnh hƣởng không đáng
kể).
Ta đã biết do khâu hiệu chỉnh trễ pha có hệ số khuếch đại ở miền tần số thấp lớn nên
có tác dụng làm giảm sai số xác lập của hệ thống. Để đáp ứng quá độ của hệ thống sau khi
hiệu chỉnh trễ pha gần nhƣ không đổi thì cặp cực quyết định của hệ thống trƣớc và sau khi
hiệu chỉnh phải nằm rất gần nhau. Để đạt đƣợc điều này ta phải thêm đặt cực và zero của
khâu hiệu chỉnh trễ pha sau cho dạng QĐNS thay đổi không đáng kể. Đây là nguyên tắc
cần tuân theo khi thiết kế khâu hiệu chỉnh trễ pha. Trình tự thiết kế dƣới đây cụ thể hóa
nguyên tắc trên:
TRÌNH TỰ THIẾT KẾ
Khâu hiệu chỉnh : Trễ pha
Phương pháp thiết kế : QĐNS
Bước 1: Xác định β từ yêu cầu về sai số xác lập.
Nếu yêu cầu về sai số xác lập cho dƣới dạng hệ số vận tốc KV* thì tính bằng công
thức sau:
KV
KV*
(KV và KV* là hệ số vận tốc của hệ thống trƣớc và sau khi hiệu chỉnh)
Bước 2: Chọn zero của khâu hiệu chỉnh sao cho:
1
T
Re s1*, 2
( s1*, 2 là cặp cực quyết định của hệ thống sau khi hiệu chỉnh)
Bước 3: Tính cực của khâu hiệu chỉnh:
121
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1 1
.
T T
Bước 4: Tính KC bằng cách áp dụng công thức:
GC (s)G( s) ss* 1
1, 2
Trong đó s *
1, 2 là cặp cực quyết định của hệ thống sau khi hiệu chỉnh. Do yêu cầu thiết
kế không làm ảnh hƣởng đáng kể đến đáp ứng quá độ nên có thể tính gần đúng: s1*, 2 s1, 2
Giải thích:
Bước 1: Ta có hệ số vận tốc của hệ thống trƣớc và sau khi hiệu chỉnh là:
KV lim sG( s )
s 0
K lim sGC ( s )G ( s ) lim GC ( s ) lim sG( s )
*
V
s 0 s 0 s 0
lim sG( s )
s 1 / T K K
lim K C C V
s0 s 1/ T s 0
K K
C*V
KV
K C KV
Nếu K C 1 thì
KV*
Do đó ta chọn β bằng công thức trên. Các bƣớc thiết kế tiếp theo đảm bảo K C 1.
Bước 2: Gọi s1,2 là cặp cực quyết định của hệ thống trƣớc khi hiệu chỉnh:
G ( s) s s 1
1 G( s) ss 0
1, 2
1, 2
G ( s) s s 1800
1, 2
Gọi s1, 2 là cặp cực quyết định của hệ thống sau khi hiệu chỉnh:
*
GC ( s)G( s) s s*1, 2 1
1 GC ( s)G( s) s s*1, 2 0
G ( s)G( s) s s*1, 2 1800
C
Xét điều kiện về pha. Để hệ thống có chất lƣợng quá độ gần nhƣ không thay đổi thì
s1*, 2 s1, 2 . Suy ra:
GC ( s)G( s) s s* 180 0
1, 2
GC ( s) s s* G( s) s s* 1800
1, 2 1, 2
GC ( s) s s* 180 0 G ( s) s s*
1, 2 1, 2
180 0 G ( s) s s 180 0 (180 0 )
1, 2
122
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
GC ( s) s s* 0 0 (6.29)
1, 2
Phân tích ở trên cho thấy cực và zero của khâu hiệu chỉnh trễ pha phải thỏa mãn biểu thức
(6.29). Khi thiết kế ta thƣờng chọn khâu hiệu chỉnh trễ pha sau cho
50 GC ( s) s s* 0 0 , để đạt đƣợc điều này có thể đặt cực và zero của khâu hiệu chỉnh
1, 2
trễ pha nằm rất gần góc tọa độ so với phần thực của nghiệm s1*, 2 . Do đó ta chọn vị trí zero
sao cho:
1
Re( s1*, 2 )
T
1 1
Bước 3: Suy ra:
T T
Để ý rằng bằng cách chọn nhƣ trên 1/T cũng nằm rất gần gốc tọa độ do β <1.
Bước 4: Ở bƣớc 2 và 3 ta mới chọn cực và zero của khâu hiệu chỉnh trễ pha để thỏa mãn
điều kiện về pha. Để thỏa mãn điều kiện biên độ ta chọn KC bằng công thức:
GC ( s)G( s) s s* 1
1, 2
Có thể dễ dàng kiểm chứng đƣợc rằng do cách chọn zero và cực của khâu hiệu chỉnh
nhƣ ở bƣớc 2 và bƣớc 3 mà ở bƣớc 4 ta luôn tính đƣợc KC ≈ 1.
Nhƣ vậy KC thỏa mãn giả thiết ban đầu khi tính hệ số β ở bƣớc 1.
Thí dụ 6.5: Thiết kế khâu hiệu chỉnh trễ pha dùng phương pháp QĐNS.
Hãy thiết kế khâu hiệu chỉnh GC(s) sao cho hệ thống có sơ đồ khối dƣới đây sau khi
hiệu chỉnh có sai số đối với tín hiệu vào là hàm dốc là 0,02 và đáp ứng quá độ thay đổi
không đáng kể.
Lời giải:
Hệ số vận tốc của hệ thống trƣớc khi hiệu chỉnh:
10
KV lim sG( s) lim s 0.83
s 0 s 0 s( s 3)(s 4)
Sai số xác lập của hệ thống khi tín hiệu vào là hàm dốc là:
1 1
exl 1.2
KV 0.83
Vì yêu cầu thiết kế làm giảm sai số xác lập nên sử dụng khâu hiệu chỉnh trễ pha:
s (1 / T )
GC ( s) K C 1
s 1 / T
Bước 1: Tính
Hệ số vận tốc của hệ sau khi hiệu chỉnh:
123
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1 1
KV* *
50
exl 0.02
Do đó:
KV 0.83
0.017
KV* 50
Bước 2: Chọn zero của khâu hiệu chỉnh
Các cực của hệ thống trƣớc khi hiệu chỉnh là nghiệm của phƣơng trình:
10
1 G ( s) 0 1 0 s 3 7 s 2 12s 10 0
s( s 3)( s 4)
s1, 2 1 j
s3 5
Vậy cặp cực quyết định trƣớc khi hiệu chỉnh là s1, 2 1 j
1 1 1
Chọn sao cho: Res1 1 0.1
T T T
Bước 3: Tính cực của khâu hiệu chỉnh:
1 1 1
0.017 0.1 0.0017
T T T
s 0.1
GC ( s) K C
s 0.0017
Bước 4: Tính KC:
GC (s)G(s) ss* 1
s 0.1 10
KC . 1
s 0.0017 s( s 3)(s 4) s s*
Để đáp ứng quá độ không thay đổi đáng kể thì:
s1*, 2 s1, 2 1 j
Thế vào công thức trên ta đƣợc:
KC
1 j 0.1 10
. 1
1 j 0.0017 (1 j 4)
KC 1.0042 1
Vậy khâu hiệu chỉnh trễ pha cần thiết kế là:
s 0.1
GC ( s)
s 0.0017
Hình 6.19 cho thấy QĐNS của hệ thống trƣớc và sau khi hiệu chỉnh trễ pha gần nhƣ
trùng nhau. Do vị trí cặp cực phức quyết định gần trùng nhau nên đáp ứng quá độ của hệ
thống trƣớc và sau khi hiệu chỉnh gần nhƣ nhau, xem hình 6.20. Hình 6.20 cũng cho thấy
sai số xác lập của hệ thống sau khi hiệu chỉnh nhỏ hơn rất nhiều so với trƣớc khi hiệu
chỉnh. Nhƣ vậy khâu hiệu chỉnh trễ pha vừa thiết kế ở trên thỏa mãn yêu cầu đặt ra.
124
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.19. QĐNS của hệ thống ở thí dụ 6.5
Hình 6.20: Đáp ứng của hệ thống ở thí dụ 6.5 đối với tín hiệu vào là hàm dốc trước và
sau khi hiệu chỉnh
6.3.3 Hiệu chỉnh sớm trễ pha
Hàm truyền khâu hiệu chỉnh sớm trễ pha cần thiết kế có dạng:
GC (s) GC1 (s)GC 2 (s)
Trong đó GC1 ( s) là khâu hiệu chỉnh sớm pha
GC 2 ( s) là khâu hiệu chỉnh trễ pha.
Bài toán đặt ra thiết kế GC (s) để cải thiện đáp ứng quá độ và sai số xác lập của hệ
thống.
TRÌNH TỰ THIẾT KẾ
Khâu hiệu chỉnh : Sớm trễ pha
Phương pháp thiết kế : QĐNS
Bước 1: Thiết kế khâu sớm pha GC1 ( s) để thỏa mãn yêu cầu về đáp ứng quá
độ (xem phƣơng pháp thiết kế khâu hiệu chỉnh sớm pha ở mục 6.3.1).
Bước 2: Đặt G1 (s) GC1 (s)G(s)
Thiết kế khâu hiệu chỉnh trễ pha GC 2 ( s) mắc nối tiếp vào G1 ( s) để thỏa
125
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
mãn yêu cầu về sai số xác lập mà không thay đổi đáng kể đáp ứng quá độ
của hệ thống sau khi đã hiệu chỉnh sớm pha (xem phƣơng pháp thiết kế khâu
hiệu chỉnh trễ pha ở mục 6.3.2).
Thí dụ 6.6: Thiết kế khâu hiệu chỉnh sớm trễ pha dùng phương pháp QĐNS.
Hãy thiết kế khâu hiệu chỉnh GC(s) sao cho hệ thống sau khi hiệu chỉnh có cặp cực
phức với 0.5, n 5 (rad/sec); hệ số vận tốc KV 80 .
Lời giải:
Hệ chƣa hiệu chỉnh có 0.125, n 2 (rad/sec); KV 8 . Vì yêu cầu thiết kế bộ hiệu
chỉnh để cải thiện đáp ứng quá độ và sai số xác lập nên GC(s) là khâu hiệu chỉnh sớm trễ
pha.
G1 (s) GC1 (s)GC 2 (s)
Bước 1: Thiết kế khâu hiệu chỉnh sớm pha GC1 ( s) :
1
s
T1
GC1 ( s) K C1
1
s
T1
- Cặp cực quyết định sau khi hiệu chỉnh:
s1*, 2 n jn 1 2
0.55 j 5 1 0.5
2
s1*, 2 2.5 j 4.33
- Góc pha cần bù:
* 180 0 1 2
180 0 120 0 1150
55
* 0
Hình
6.21. Góc pha cần bù
- Chọn zero của khâu sớm pha trùng với cực s 0.5 của G(s) để hạ bậc hệ thống
sau khi hiệu chỉnh.
1
0.5
T1
126
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Từ cực s1* vẽ hai nữa đƣờng thẳng tạo với nhau một góc là * nhƣ hình 6.21. Cực của
khâu sớm pha tại điểm B.
1
OB
T1
Ta có: OB OA AB
OA 0.5
sin APˆ B
AB PA
sin PAB
Dễ thấy: PA 22 4.332 4.76
APB * 550
PAB 2 * 1150 550 600
sin 550
Nên: AB 4.76 4.5
sin 600
1
OB 0.5 4.5 5
T1
Do đó:
s 0.5
GC1 ( s) K C1
s5
- Tính K C1 :
GC1 (s)G(s) s s* 1
s 0.5 4
KC` . 1
s 5 s( s 0.5) s 2.5 j 4.33
1 4
K C1 . 1
2.5 j 4.33 5 2.5 j 4.33
K C1 6.25
s 0.5
Vậy: GC1 ( s) 6.25
s5
Hàm truyền hở sau khi hiệu chỉnh sớm pha là:
s 0.5 4
G1 ( s) GC1 ( s)G( s) 6.25
s 5 s( s 0.5)
25
G1 ( s)
s( s 5)
Bước 2: Thiết kế khâu hiệu chỉnh trễ pha GC 2 (s) :
1
s
T2
GC 2 ( s ) K C 2
1
s
T2
127
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
- Xác định :
Hệ số vận tốc của hệ sau khi hiệu chỉnh sớm pha:
25
KV lim sG1 ( s) lim s 5
s 0 s 0 s( s 5)
Hệ số vận tốc mong muốn:
KV* 80
Suy ra:
KV 5 1
*
K
KV 80 16
- Xác định zero của khâu trễ pha:
1
Re( s* ) Re( 2.5 j 4.33) 2.5
T2
1
Chọn 0.16
T2
- Xác định cực của khâu trễ pha:
1 1 1
.0.16 0.01
T2 T2 16
s 0.16
GC 2 ( s) K C 2
s 0.01
- Tính KC2:
GC 2 (s)G1 (s) s s* 1
GC 2 ( s ) s s* G1 ( s ) s s* 1
GC 2 ( s ) s s* 1
2.5 j 4.33 0.16
KC 2 1
2.5 j 4.33 0.01
4.995
KC 2 1.01
4.992
s 0.16
GC 2 ( s ) 1.01
s 0.01
Tóm lại khâu hiệu chỉnh sớm trễ pha cần thiết kế là:
s 0.5 s 0.16
GC ( s) GC1 (s)GC 2 ( s) 6.25 1.01
s 5 s 0.1
GC ( s) 6.31
s 0.5s 0.16
s 5s 0.01
6.4. THIẾT KẾ HỆ THỐNG DÙNG PHƢƠNG PHÁP BIỂU ĐỒ BODE
6.4.1 Hiệu chỉnh sớm pha
Hàm truyền khâu hiệu chỉnh sớm pha cần thiết kế có dạng:
128
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1 Ts
GC ( s) KC 1
1 Ts
Bài toán đặt ra là chọn giá trị KC, va T để đáp ứng của hệ thống thỏa mãn yêu cầu
về độ dự trữ biên, độ dự trữ pha và sai số xác lập.
TRÌNH TỰ THIẾT KẾ
Khâu hiệu chỉnh : Sớm pha
Phương pháp thiết kế : Biểu đồ Bode
Bước 1: Xác định KC để thỏa mãn yêu cầu thiết kế về sai số xác lập
Bước 2: Đặt G1 (s) KC G(s) . Vẽ biểu đồ Bode của G1(s) .
Bước 3: Xác định tần số cắt biên của G1 ( s) từ điều kiện:
L1 (C ) 0 hoặc G1 ( jC ) 1
Bước 4: Xác định độ dự trữ pha của G1 ( s) (độ dự trữ pha của hệ trƣớc khi hiệu chỉnh):
M 180 1 C
Bước 5: Xác định góc pha cần bù
max M * M
Trong đó: M * là độ dự trữ pha mong muốn 50 200
Bước 6: Tính bằng cách áp dụng công thức:
1 sin max
1 sin max
Bước 7: Xác định tần số cắt mới (tần số cắt của hệ sau khi hiệu chỉnh) từ điều kiện:
L1 (C' ) 10 lg hoặc G1 ( jC' ) 1 /
Bước 8: Tính hằng số thời gian T từ điều kiện:
1
T
C
Bước 9: Kiểm tra lại hệ thống có thỏa mãn điều kiện về độ dự trữ biên hay không? Nếu
không thỏa mãn thì trở lại bƣớc 6.
Chú ý: Trong trƣờng hợp hệ thống quá phức tạp khó tìm đƣợc lời giải giải tích thì có thể
xác định ωC (bƣớc 3), M (bƣớc 4) và C (bƣớc 7) bằng cách dựa vào biểu đồ Bode.
Thí dụ 6.7. Thiết kế khâu hiệu chỉnh sớm pha dùng PP biểu đồ Bode.
Hãy thiết kế khâu hiệu chỉnh sớm pha sao cho hệ thống sau khi hiệu chỉnh có
K 20; M 500 ; GM * 10dB .
*
V
129
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hàm truyền khâu hiệu chỉnh sớm pha cần thiết kế là:
1 Ts
GC ( s) KC (α >1)
1 Ts
Bước 1: Xác định KC
Hệ số vận tốc của hệ sau khi hiệu chỉnh là:
1 Ts 4
KV lim sGC ( s)G ( s) lim sKC
*
. 2 KC
s 0 s 0 1 Ts s( s 2)
KV* 20
KC
2 2
KC 10
Bước 2:
Đặt:
4
G1 ( s ) KC G ( s ) 10.
s( s 2)
20
G1 ( s)
s(0.5s 1)
Biểu đồ Bode của G1(s) vẽ ở trang sau.
Bước 3: Tần số cắt của hệ trƣớc khi hiệu chỉnh:
G1 jC 1
40 40
1
jC jC 2 C C2 4
C4 4C2 1600 0
C 6.17
130
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Hình 6.22. Biểu đồ Bode của hệ thống trước và sau khi hiệu chỉnh sớm pha
Bước 4: Độ dự trữ pha của hệ khi chƣa hiệu chỉnh:
M 180 1 C
40 0 C
M 1800 arg 180 90 arctan
0
jC jC 2 2
6.17
M 1800 900 arctan 180 90 72
0 0 0
2
M 180
M 180 1
Bước 5: Góc pha cần bù:
max M * M 5
0
max 500 180 50
max 370
Bước 6: Tính
131
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1 sin max 1 sin 370
1 sin max 1 sin 37 0
4
Bước 7: Tính số cắt mới:
1
G1 jC
40 1 40 1
jC jC 2 4 C C 4
2
4
C 4 C 6400 0
4 2
C 8.83
(rad/sec)
Bước 8: Tính T:
1 1
T
C 8.83 4
T 0.057
T 4 0.057 0.228
1 0.228s
Vậy: GC ( s) 10
1 0.057 s
Bước 9: Kiểm tra lại điều kiện về biên độ:
Vì tần số cắt pha ω-π trƣớc và sau khi hiệu chỉnh đều bằng vô cùng nên độ dự trữ
biên của hệ trƣớc và sau khi hiệu chỉnh đều bằng vô cùng (>10dB).
Kết luận: Khâu hiệu chỉnh cần thiết kế là có hàm truyền nhƣ trên.
6.4.2 Hiệu chỉnh trễ pha
Hàm truyền khâu hiệu chỉnh sớm pha cần thiết kế có dạng:
1 Ts
GC ( s) KC 1
1 Ts
Bài toán đặt ra là chọn giá trị KC, va T để đáp ứng của hệ thống thỏa mãn yêu
cầu về độ dự trữ biên, độ dự trữ pha và sai số xác lập.
TRÌNH TỰ THIẾT KẾ
Khâu hiệu chỉnh : Trễ pha
Phương pháp thiết kế : Biểu đồ Bode
Bước 1: Xác định KC để thỏa mãn yêu cầu thiết kế về sai số xác lập
Bước 2: Đặt G1 (s) KC G(s) . Vẽ biểu đồ Bode của G1 ( s)
Bước 3: Xác định tần số cắt biên C của hệ sau khi hiệu chỉnh từ điều kiện:
1 C 1800 M *
Trong đó: M * là độ dự trữ pha mong muốn 50 200
132
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Bước 4: Tính α từ điều kiện:
L1 C 20 lg
1
G1 jC
Bước 5: Chọn zero của khâu hiệu chỉnh trễ pha sao cho:
1
C T
T
Bước 6: Tính hằng số thời gian T:
1 1
T
T T
Bước 7: Kiểm tra lại hệ thống có thỏa mãn điều kiện về độ dự trữ biên hay không? Nếu
không thỏa mãn thì trở lại bƣớc 3.
Chú ý: Trong trƣờng hợp hệ thống quá phức tạp khó tìm đƣợc lời giải giải tích thì có thể
xác định 1 C , C (bƣớc 3) và L1 C (bƣớc 4) bằng cách dựa vào biểu đồ Bode.
Thí dụ 6.8: Thiết kế khâu hiệu chỉnh trễ pha dùng PP biểu đồ Bode.
Hãy thiết kế khâu hiệu chỉnh trễ pha sao cho hệ thống sau khi hiệu chỉnh có:
K 5; M 40 ; GM * 10dB .
*
V
Lời giải:
Hàm truyền khâu hiệu chỉnh trễ pha cần thiết kế là:
1 Ts
GC ( s) KC 1
1 Ts
Bước 1: Xác định KC
Hệ số vận tốc của hệ sau khi hiệu chỉnh là:
1 Ts 1
KV lim sGC ( s)G ( s ) lim sK C
*
. KC
s 0 s 0 1 Ts s( s 1) 0.5s 1
KC KV*
KC 5
Bước 2:
Đặt:
1
G1 ( s ) K C G ( s )
s ( s 1) 0.5s 1
1
G1 ( s)
s ( s 1) 0.5s 1
Biểu đồ Bode của G1 ( s) vẽ ở trang sau.
133
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Bước 3: Xác định tần số cắt mới:
Cách 1: Tìm C' bằng phƣơng pháp giải tích. Ta có:
1 C 1800 M *
900 arctan C arctan 0.5C 1800 400 50
arctan C arctan 0.5C 450
C 0.5C tan 450 1
1 0.5C
0.5 C 1.5C 1 0
2
C 0.56
(rad/sec)
Hình 6.23. Biểu đồ Bode của hệ thống trước và sau khi hiệu chỉnh trễ pha
134
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Cách 2: Dựa vào biểu đồ Bode
Ta có:
1 C 1800 M *
1 C 1800 40 5
1 C 1350
Vẽ đƣờng thẳng có hoành độ 1350 . Hoành độ giao điểm của đƣờng thẳng này với
biểu đồ Bode về pha 1 chính là giá trị tần số cắt mới.
Theo hình vẽ ta thấy: C 0.5 (rad/sec)
Bước 4:
Cách 1: Tính α từ điều kiện:
1
G1 jC
5 1
s ( s 1)(0.5s 1) s jC
5 1
j 0.56 j 0.56 1 0.5 j 0.56 1
5 1
0.56 0.562 1 0.282 1
5 1
0.56 11.46 1.038
0.133
Cách 2: Tính α từ điều kiện:
L1 C 20lg
Dựa vào biểu đồ Bode ta thấy:
L1 C 18dB
18 20 lg
lg 0.9
100.9
0.126
Bước 5: Chọn zero của khâu trễ pha:
1
C 0.56
T
1
0.05
T
T 20
Bước 6: Tính thời hằng T
135
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
1 1
0.133 0.05 0.067
T T
T 150
(20s 1)
Vậy: GC ( s) 5
(150s 1)
Bước 7: Kiểm tra lại điều kiện biên độ:
Dựa vào biểu đồ Bode ta thấy độ dự trữ biên sau khi hiệu chỉnh là:
GM * 10dB
Kết luận: Khâu hiệu chỉnh vừa thiết kế đạt yêu cầu về độ dự trữ biên.
Nhận xét:
Qua hai thí dụ thiết kế khâu hiệu chỉnh sớm pha và trễ pha dùng phƣơng pháp biểu
đồ Bode ta có nhận xét sau:
- Nếu G(s) là hệ bậc 2 thì bài thiết kế khâu hiệu chỉnh sớm pha và trễ pha hoàn toàn
có thể giải đƣợc bằng các công thức giải tích, bƣớc vẽ biểu đồ Bode không thật sự cần
thiết.
- Nếu G(s) là hệ bậc 3 trở lên thì các công thức giải tích để tìm tần số cắt biên, tần
số cắt pha, độ dự trữ biên, độ dự trữ pha… trở nên phức tạp, trong trƣờng hợp này nên vẽ
biểu đồ Bode và xác định các thông số dựa vào biểu đồ Bode vừa vẽ.
Biểu đồ Bode biên độ đƣợc vẽ bằng các đƣờng tiệm cận, biểu đồ Bode về pha đƣợc
vẽ bằng cách phân tích định tính và thay một số giá trị tần số ω biểu thức φ(ω) để có giá
trị định lƣợng.
- Để ý băng thông của hệ sau khi hiệu chỉnh sớm pha và trễ pha. Sau khi hiệu chỉnh
sớm pha băng thông của hệ thống đƣợc mở rộng, đáp ứng của hệ đối với tín hiệu tần số
cao tốt hơn, đáp ứng quá độ đƣợc cải thiện; trong khi đó sau khi hiệu chỉnh trễ pha băng
thông của hệ thống bị thu hẹp, đáp ứng của hệ đối với tín hiệu tần số cao kém đi, đáp ứng
quá độ của hệ thống bị chậm lại. Vì vậy cần nhấn mạnh rằng hai khâu hiệu chỉnh sớm pha
và trễ pha có đặc điểm hoàn toàn khác nhau, không thể sử dụng lẫn lộn đƣợc.
6.5. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN HỒI TIẾP TRẠNG THÁI
6.5.1. Điều khiển hồi tiếp trạng thái
Hình 6.24. Hệ thống điều khiển hồi tiếp trạng thái
Cho đối tƣợng điều khiển mô tả bởi phƣơng trình trạng thái:
x(t ) Ax(t ) Bu (t )
(6.30)
c(t ) Ax(t )
Hệ thống điều khiển hồi tiếp trạng thái (xem hình 6.24) là hệ thống trong đó tín hiệu
điều khiển xác định bởi:
u(t ) r (t ) Kx(t ) (6.32)
136
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Thay (6.31) vào (6.32) ta đƣợc:
x(t ) Ax(t ) B[r (t ) Kx(t )]
c(t ) Cx(t )
(6.32)
x(t ) A BK x(t ) Br (t )]
c(t ) Cx(t )
Thiết kế hệ thống hồi tiếp trạng thái là chọn vector hồi tiếp trạng thái K sao cho hệ
thống kín mô tả bởi biểu thức (6.32) thỏa mãn yêu cầu chất lƣợng mong muốn.
6.5.2. Tính điều khiển đƣợc và quan sát đƣợc
Để có thể thiết kế đƣợc hệ thống hồi tiếp trạng thái (6.32) điều kiện cần là tất cả các
trạng thái của hệ thống phải đo lƣờng đƣợc (quan sát đƣợc) và hệ sẳn sàng nhận tín hiệu
điều khiển (điều khiển đƣợc). Mục này sẽ trình bày cụ thể về khái niệm điều khiển đƣợc
và quan sát đƣợc cũng nhƣ các kiểm tra toán học để đánh giá hệ có thể điều khiển đƣợc và
quan sát đƣợc hay không.
6.5.2.1. Tính điều khiển được
Hệ thống (6.30) được gọi là điều khiển được hoàn toàn nếu tồn tại luật điều khiển
u(t) có khả năng chuyển hệ từ trạng thái đầu tại x t0 t đến trạng thái cuối x t f bất kỳ
trong khoảng thời gian hữu hạn t0 t t f .
Một cách định tính, điều này có nghĩa là hệ thống có thể điều khiển đƣợc nếu mỗi
biến trạng thái của hệ đều có thể bị ảnh hƣởng bởi tín hiệu điều khiển u(t). Tuy nhiên, nếu
một hoặc vài biến trạng thái không bị ảnh hƣởng bởi u(t) hì các biến trạng thái này không
thể bị điều khiển bởi u(t) trong khoảng thời gian hữu hạn và trong trƣờng hợp này hệ
thống không điều khiển đƣợc hoàn toàn.
Để ví dụ về hệ thống không điều khiển đƣợc hoàn toàn, chúng ta xét hệ thống mô tả
bởi sơ đồ dòng tín hiệu ở hình 6.25. Hệ này gồm 4 trạng thái, chỉ có hai trạng thái x1(t) và
x2(t) bị ảnh hƣởng bởi u(t), còn hai trạng thái x3(t) và x4(t) không bị ảnh hƣởng bởi u(t).
Do đó x3(t) và x4(t) không thể điều khiển đƣợc, điều này có nghĩa là u(t) không thể làm
thay đổi x3(t) và x4(t) từ trạng thái đầu x3(0) và x4(0) đến trạng thái cuối x3(tf) và x4(tf)
trong khoảng thời gian hữu hạn. Vì vậy hệ không điều khiển đƣợc hoàn toàn.
Hình 6.25: Sơ đồ dòng tín hiệu của một hệ thốngkhông điều khiển được hoàn toàn
Để kiểm tra tính điều khiển đƣợc của hệ thống (6.30) chúng ta thành lập ma trận C,
gọi là ma trận điều khiển đƣợc:
C B AB A2 B An1B (6.33)
137
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Điều kiện cần và đủ để hệ thống điều khiển đƣợc là:
rank (C ) n (6.34)
Đối với hệ thống một đầu vào một đầu ra (SISO) thì ma trận C là ma trận vuông cấp
n. Do đó điều kiện (6.34) trở thành:
det(C ) 0 (6.35)
Thí dụ 6.9: Cho hệ thống mô tả bởi phƣơng trình trạng thái:
x(t ) Ax(t ) Bu (t )
c(t ) Cx(t )
0 1 5
trong đó: A B C 1 3
2 3 2
Hãy đánh giá tính điều khiển đƣợc của hệ thống trên.
Lời giải
Đối với hệ bậc hai, ma trận điều khiển đƣợc là: C = [A AB]
5 0 1 5 5 2
C
2 2 3 2 2 16
det(C ) 84 0
rank (C ) 2
Do đó hệ thống trên điều khiển đƣợc hoàn toàn.
6.5.2.2. Tính quan sát được
Hệ thống (6.30) được gọi là quan sát được hoàn toàn nếu cho tín hiệu điều khiển
u(t) và đầu ra c(t) trong khoảng t0 t t f ta có thể xác định được trạng thái đầu x(t0) .
Một cách định tính, hệ thống là quan sát đƣợc nếu mỗi biến trạng thái của hệ đều ảnh
hƣởng đến đầu ra c(t). Thƣờng chúng ta muốn xác định thông tin về trạng thái của hệ
thống dựa vào việc đo c(t). Tuy nhiên nếu chúng ta không quan sát đƣợc một hay nhiều
trạng thái từ việc đo c(t) thì hệ không điều khiển đƣợc hoàn toàn.
Để ví dụ về hệ không quan sát đƣợc hoàn toàn, chúng ta xét hệ thống có sơ đồ dòng
tín hiệu ở hình 6.26. Hệ này gồm 4 trạng thái, trong đó chỉ có hai trạng thái x1(t) và x2(t) là
ảnh hƣởng đến c(t) nên có thể quan sát đƣợc.
Hai trạng thái còn lại x3(t) và x4(t) không ảnh hƣởng đến c(t) nên không thể quan sát
đƣợc. Do đó hệ thống ở hình 6.26 không quan sát đƣợc hoàn toàn.
Hình 6.26: Sơ đồ dòng tín hiệu của một hệ thống không quan sát được hoàn toàn
138
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Để ý rằng mặc dù hệ thống ở hình 6.26 không quan sát đƣợc hoàn toàn nhƣng lại
điều khiển đƣợc hoàn toàn vì tín hiệu điều khiển u(t) ảnh hƣởng đến tất cả các trạng thái
của hệ thống. Ngƣợc lại, hệ thống ở hình 6.27 mặc dù không điều khiển đƣợc hoàn toàn
nhƣng lại quan sát đƣợc hoàn toàn do tất cả các trạng thái của hệ thống đều ảnh hƣởng
đến tín hiệu ra c(t).
Để kiểm tra tính quan sát đƣợc của hệ thống (6.30) chúng ta thành lập ma trận O, gọi
là ma trận quan sát đƣợc:
C
CA
O
n1
CA
Điều kiện cần và đủ để hệ thống quan sát đƣợc là:
rank(O ) = n (6.37)
Đối với hệ thống một đầu vào một đầu ra (SISO) thì ma trận O là ma trận vuông cấp
n. Do đó điều kiện (6.37) trở thành:
det(O ) ≠ 0 (6.38)
Thí dụ 6.10: Hãy đánh giá tính quan sát đƣợc của hệ thống ở thí dụ 6.9.
Lời giải:
Ma trận quan sát đƣợc của hệ thống ở thí dụ 6.9 là:
C
O
CA
Do đó hệ thống quan sát đƣợc hoàn toàn. Tính điều khiển đƣợc và quan sát đƣợc có
ý nghĩa rất quan trọng trong lý thuyết điều khiển tối ƣu hiện đại, các tính chất này quyết
định sự tồn tại của lời giải cho bài toán điều khiển tối ƣu. Độc giả có thể tham khảo thêm
các tài liệu về lý thuyết điều khiển hiện đại để nắm đƣợc phần chứng minh điều kiện cần
và đủ để hệ thống điều khiển đƣợc và quan sát đƣợc, đồng thời có đƣợc hiểu biết đầy đủ
hơn về hai khái niệm quan trọng này.
6.5.3 Phƣơng pháp phân bố cực
Nếu hệ thống (6.30) điều khiển đƣợc và quan sát đƣợc thì có thể xác định đƣợc luật
điều khiển u(t) = r(t) - Kx(t) để phƣơng trình đặc tính của hệ hồi tiếp trạng thái (6.32) có
nghiệm bất kỳ.
Phƣơng trình đặc tính của hệ hồi tiếp trạng thái (6.32) là:
det[sI - A + BK] = 0 (6.39)
Phƣơng pháp chọn vector hồi tiếp trạng thái K để phƣơng trình đặc tính (6.39) có
nghiệm tại vị trí mong muốn gọi là phƣơng pháp phân bố cực.
Có nhiều cách thiết kế bộ điều khiển phân bố cực, trong giáo trình này giới thiệu hai
cách thƣờng sử dụng nhất.
• Cách 1: Tính K bằng cách cân bằng các hệ số của phƣơng trình đặc trƣng.
139
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Cách này trực quan, dễ hiểu hơn các phƣơng pháp khác và cũng rất dễ áp dụng trong
trƣờng hợp hệ bậc thấp (bậc 3 trở xuống).
TRÌNH TỰ THIẾT KẾ
Bộ điều khiển : Hồi tiếp trạng thái
Phương pháp thiết kế : Phân bố cực bằng cách cân bằng các hệ số
của phƣơng trình đặc trƣng
Bước 1: Kiểm tra tính điều khiển đƣợc (và quan sát đƣợc).
- Nếu hệ không điều khiển đƣợc thì kết thúc vì bài toán phân bố cực không có lời
giải.
- Nếu hệ điều khiển đƣợc thì tiếp tục bƣớc 2.
Bước 2: Viết phƣơng trình đặc tính của hệ thống hồi tiếp trạng thái:
det[sI - A + BK] = 0 (1)
Bước 3: Viết phƣơng trình đặc tính mong muốn:
n
(s pi) 0
i 1
_____
Trong đó pi ( i 1...n ) là các cực mong muốn.
Bước 4: Cân bằng các hệ số của hai phƣơng trình đặc tính (1) và (2) sẽ tìm đƣợc vector
hồi tiếp trạng thái K.
Thí dụ 6.11. Cho đối tƣợng điều khiển mô tả bởi hệ phƣơng trình biến trạng thái:
x (t ) Ax Bu
c(t ) Cx(t )
0 1 0 0
Với:
A 0 0 1 B 3 C 0 0 1
4 7 3 1
Hãy xác định luật điều khiển u(t) = r(t) - Kx(t) sao cho hệ thống kín có cặp cực phức
với ξ = 0,6; ωn =10 và cực thứ ba là cực thực tại - 20 .
Lời giải:
Phƣơng trình đặc tính của hệ hồi tiếp trạng thái là:
det[sI - A + BK] =
1 0 0 0 1 0 0
det s 0 1 0 0 0 1 3k1 k2 k3 0
0 0 1 4 7 3 1
s 1 0 0 0 0
det s 0 s 1 3k1 3k 2 3k3 0
4 7 s 3 k k3
1 k2
140
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
s 1 0
det 3k1 s 3k 2 1 3k3 0
4 k 7 k s 3 k3
1 2
s( s 3k 2 )(s 3 k 3 ) s(7 k 2 )(1 3k 3 )
3k1 ( s 3 k 3 ) (4 k1 )(1 3k 3 ) 0
s (3 3k2 k3 )s (7 3k1 10k2 21k3 )s (4 10k1 21k3 ) 0
3 2
(1)
Phƣơng trình đặc tính mong muốn là:
(s 20)(s 2 2 n s n2 0
(s 20)(s 2 2 0,6 10s 10 2 0
s 3 32s 2 340s 2000 0 (2)
Cân bằng các hệ số của hai phƣơng trình đặc tính (1) và (2), suy ra:
3 3k 2 k 3 32
7 3k1 10k 2 21k3 340
4 10k 12k 2000
1 2
Giải hệ phƣơng trình trên, ta đƣợc:
k1 220,578
k 2 3,839
k 17,482
3
Vậy: K [220,578 3,839 17,482]
• Cách 2: Tính K bằng cách áp dụng công thức Ackermann.
6.6. THIẾT KẾ BỘ ĐIỀU KHIỂN PID
Về nguyên tắc có thể thiết kế bộ điều khiển PID bằng phƣơng pháp QĐNS hoặc
phƣơng pháp biểu đồ Bode. Tuy nhiên trong thực tế áp dụng các phƣơng pháp trên để tìm
thông số của bộ điều khiển PID gặp nhiều khó khăn nếu không có sự trợ giúp của máy
(vi) tính. Phƣơng pháp thiết kế bộ điều khiển PID đƣợc thƣờng sử dụng trong thực tế là
phƣơng pháp Zeigler–Nichols.
Phƣơng pháp Zeigler-Nichols
Phƣơng pháp Zeigler – Nichols là phƣơng pháp thực nghiệm để thiết kế bộ điều
khiển PI, PD hoặc PID.
Cho đối tƣợng có đáp ứng đối với tín hiệu vào là hàm nấc nhƣ hình vẽ:
141
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Thông số bộ điều khiển PI, PD, PID đƣợc chọn nhƣ sau:
Thí dụ 6.12: Hãy thiết kế bộ điều khiển PID điều khiển nhiệt độ của lò nhiệt, biết đặc tính
quá độ của lò nhiệt nhƣ sau:
Một phƣơng pháp khác cũng thƣờng dùng để thiết kế bộ điều khiển PID là phƣơng
pháp giải tích. Sau đây là một thí dụ:
Thí dụ 6.13: Cho hệ thống điều khiển nhƣ hình vẽ:
Hãy xác định thông số của bộ điều khiển PID sao cho hệ thống thỏa mãn yêu cầu:
- Hệ có cặp nghiệm phức với ξ = 0.5, ωn=8
- Hệ số vận tốc KV = 100.
Lời giải:
• Hàm truyền bộ điều khiển PID cần thiết kế:
KI
GC ( s) K P KDs
s
• Hệ số vận tốc của hệ sau khi hiệu chỉnh:
K 100
KV lim sG C ( s)G ( s) lim s K P I K D s 2
s 0
s s 10s 100
KV K I
142
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 6: Thiết kế hệ thống điều khiển liên tục
Theo yêu cầu đề bài KV = 100 nên suy ra:
KI = 100
• Phƣơng trình đặc tính của hệ sau khi hiệu chỉnh là:
1 GC ( s)G ( s) 0
K 100
1 K P I K D s 2 0
s s 10s 100
s(s 2 10s 100) 100( K D s 2 K P s K I ) 0
s 3 (10 100K D )s 2 (100 100K P )s 100K I 0 (1)
Để hệ thống có cặp cực phức với ξ = 0.5, ωn = 8 thì phƣơng trình đặc tính (1) phải
có dạng:
( s a)(s 2 2 ns n2 ) 0
( s a)(s 2 8s 64) 0
(s 3 (a 8)s 2 (8a 64)s 64a 0 (2)
Cân bằng các hệ số hai phƣơng trình (1) và (2), suy ra:
10 100 K D a 8
100 100 K P 8a 64
100 K 64a
I
Với KI = 100, giải hệ phƣơng trình trên ta đƣợc:
a 156,25
K P 12,14
K 1,54
D
Vậy hàm truyền của khâu hiệu chỉnh PID cần thiết kế là:
100
GC ( s) 12,64 1,54s
s
143
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Chương 7
MÔ TẢ TOÁN HỌC
HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
7.1 HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
7.1.1 Khái niệm
Chƣơng này đề cập đến một loại hệ thống điều khiển có hồi tiếp, trong đó tín hiệu tại
một hay nhiều điểm là một chuỗi xung, không phải là hàm liên tục theo thời gian. Tùy
thuộc vào phƣơng pháp lƣợng tử hóa tín hiệu mà ta có các loại hệ thống xử lý tín hiệu
khác nhau. Phƣơng pháp lƣợng tử hóa theo thời gian cho tín hiệu có biên độ liên tục, thời
gian rời rạc. Hệ thống xử lý loại tín hiệu này đƣợc gọi là hệ thống rời rạc. Nếu phép lƣợng
tử hóa đƣợc tiến hành theo thời gian và cả theo biên độ thì kết quả nhận đƣợc là tín hiệu
số. Hệ thống xử lý tín hiệu số gọi là hệ thống số. Trong hệ thống rời rạc và hệ thống số,
thông số điều khiển – biên độ của tín hiệu chỉ xuất hiện tại các thời điểm rời rạc cách đều
nhau đúng bằng một chu kỳ lấy mẫu tín hiệu. Vì có thời gian trễ tất yếu do lấy mẫu, việc
ổn định hệ thống trở nên phức tạp hơn so với hệ liên tục, do đó đòi hỏi những kỹ thuật
phân tích và thiết kế đặc biệt.
Sự phát triển mạnh mẽ của kỹ thuật số, kỹ thuật vi xử lý và kỹ thuât máy tính làm
cho ngày càng có nhiều hệ thống điều khiển số đƣợc sử dụng để điều khiển các đối tƣợng.
Hệ thống điều khiển số có nhiều ƣu điểm so với hệ thống điều khiển liên tục nhƣ uyển
chuyển, linh hoạt, dễ dàng thay đổi thuật toán điều khiển, dễ dàng áp dụng các thuật toán
điều khiển phức tạp bằng cách lập trình. Máy tính số còn có thể điều khiển nhiều đối
tƣợng cùng một lúc. Ngoài ra, giá máy tính ngày càng hạ trong khi đó tốc độ xử lý, độ tin
cậy ngày càng tăng lên cũng góp phần làm cho việc sử dụng các hệ thống điều khiển số
trở nên phổ biến. Hiện nay các hệ thống điều khiển số đƣợc sử dụng rất rộng rãi, từ các bộ
điều khiển đơn giản nhƣ điều khiển nhiệt độ, điều khiển động cơ DC, AC, … đến các hệ
thống điều khiển phức tạp nhƣ điều khiển robot, máy bay, tàu vũ trụ, các hệ thống điều
khiển quá trình công nghệ hóa học và các hệ thống tự động cho những ứng dụng khác
nhau.
Hình 7.1 trình bày sơ đồ khối của hệ thống điều khiển số thƣờng gặp, trong hệ thống
có hai loại tín hiệu: tín hiệu liên tục c(t ), u R (t ) , và tín hiệu số r (kT ), cht (kT ), u(kT ) . Trung
tâm của hệ thống là máy tính số, máy tính có chức năng xử lý thông tin phản hồi từ cảm
biến, và xuất ra tín hiệu điều khiển đối tƣợng. Vì cảm biến và đối tƣợng là hệ thống liên
tục nên cần sử dụng bộ chuyển đổi A/D và D/A để giao tiếp với máy tính. Do đó để phân
tích và thiết kế hệ thống điều khiển số trƣớc tiên ta phải mô tả toán học đƣợc quá trình
chuyển đổi A/D và D/A. Tuy nhiên, hiện nay không có phƣơng pháp nào cho phép mô tả
144
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
chính xác quá trình chuyển đổi A/D và D/A do sai số lƣợng tử hóa biên độ, vì vậy thay vì
khảo sát hệ thống số ở hình 7.1 ta khảo sát hệ rời rạc ở hình 7.2.
r(kT) u(kT) uR(t) c(t)
Máy tính số D/A Đối tƣợng
cht(kT)
A/D Cảm biến
Hình 7.1. Sơ đồ khối hệ thống điều khiển số
r(kT) u(kT) uR(t) c(t)
Xử lý rời rạc Giữ dữ liệu Đối tƣợng
cht(kT)
Lấy mẫu Cảm biến
Hình 7.2. Sơ đồ khối hệ thống điều khiển rời rạc
Trong giáo trình này, chúng ta phát triển các phƣơng pháp phân tích và thiết kế hệ
thống điều khiển liên tục cho hệ thống điều khiển rời rạc. Nếu độ phân giải của phép
lƣợng tử hóa biên độ đủ nhỏ để có thể bỏ qua sai số thì ta có thể xem tín hiệu số là tín
hiệu rời rạc, điều đó có nghĩa là lý thuyết điều khiển rời rạc trình bày trong giáo trình này
hoàn toàn có thể áp dụng để phân tích và thiết kế các hệ thống điều khiển số.
7.1.2 Đặc điểm lấy mẫu
Lấy mẫu là biến đổi tín hiệu liên tục theo thời gian thành tín hiệu rời rạc theo thời
gian. Xét bộ lấy mẫu có đầu vào là tín hiệu liên tục x(t) và đầu ra là tín hiệu rời rạc x * (t )
(xem hình 7.3). Quá trình lấy mẫu có thể mô tả bởi biểu thức toán học sau:
x* (t ) x(t ).s(t ) (7.1)
trong đó s(t) là chuỗi xung dirac:
s(t ) (t kT )
k
(7.2)
Thay (7.2) vào (7.1) , đồng thời giả sử rằng e(t) = 0 khi t <0, ta đƣợc:
x * (t ) x(t ) (t kT )
k 0
(7.3)
x (t ) x(kT ) (t kT )
*
k 0
Biến đổi Laplace hai vế phƣơng trình (7.3) , ta đƣợc:
X * ( s) x(kT )e kTs (7.4)
k 0
Biểu thức (7.4) chính là biểu thức toán học mô tả quá trình lấy mẫu.
145
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Hình 7.3. Quá trình lấy mẫu dữ liệu
Định lý Shannon: Để có thể phục hồi dữ liệu sau khi lấy mẫu mà không bị méo dạng thì
tần số lấy mẫu phải thỏa điều kiện:
1
f 2 fc (7.5)
T
trong đó là fC tần số cắt của tín hiệu cần lấy mẫu.
Trong các hệ thống điều khiển thực tế, nếu có thể bỏ qua đƣợc sai số lƣợng tử hóa
thì các khâu chuyển đổi A/D chính là các khâu lấy mẫu.
7.1.3 Khâu giữ dữ liệu
Khâu giữ dữ liệu là khâu chuyển tín hiệu rời rạc theo thời gian thành tín hiệu liên tục
theo thời gian.
Khâu giữ dữ liệu có nhiều dạng khác nhau, đơn giản nhất và đƣợc sử dụng nhiều
nhất trong các hệ thống điều khiển rời rạc là khâu giữ bậc 0 (Zero-Order Hold – ZOH),
xem hình 7.4.
146
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Hình 7.4. Khâu giữ bậc 0 (ZOH)
Ta tìm hàm truyền của khâu ZOH. Để ý rằng nếu tín hiệu vào của khâu ZOH là xung
dirac thì tín hiệu ra là xung vuông có độ rộng bằng T (hình 7.4b). Ta có:
R(s)=1 (vì r(t) là hàm dirac)
1 1 1 e Ts
C ( s) Lc(t ) Lu (t ) u (t T ) e Ts
s s s
C ( s)
Theo định nghĩa: GZOH ( s)
R( s )
1 e Ts
Do đó: GZOH ( s)
s
Biểu thức (7.6) chính là hàm truyền của khâu giữ bậc 0. Trong các hệ thống điều
khiển thực tế, nếu có thể bỏ qua đƣợc sai số lƣợng tử hóa thì các khâu chuyển đổi D/A
chính là các khâu giữ bậc 0 (ZOH).
NHẬN XÉT:
Bằng cách sử dụng phép biến đổi Laplace ta có thể mô tả quá trình lấy mẫu và giữ
dữ liệu bằng các biểu thức toán học (7.4) và (7.6). Tuy nhiên các biểu thức toán học này
lại chứa hàm ex nên nếu ta sử dụng để mô tả hệ rời rạc thì khi phân tích, thiết kế hệ thống
sẽ gặp nhiều khó khăn. Ta cần mô tả toán học khác giúp khảo sát hệ thống rời rạc dễ dàng
hơn, nhờ phép biến đổi Z trình bày dƣới đây chúng ta sẽ thực hiện đƣợc điều này.
7.2 PHÉP BIẾN ĐỔI Z
7.2.1 Định nghĩa:
Cho x(k) là chuỗi tín hiệu rời rạc. Biến đổi Z của x(k) là:
X ( z ) x(k ) x( k ) z k
(7.7)
k
147
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Trong đó: z eTs (s là biến Laplace)
Ký hiệu: x(k ) X ( z )
Z
Nếu x(k ) 0, k 0 thì biểu thức định nghĩa trở thành:
X ( z ) x(k ) x(k ) z k (7.8)
k 0
Miền hội tụ: (Region of convergence – ROC)
ROC là tập hợp tất cả các giá trị z sao cho X(z) hữu hạn.
Ý nghĩa của phép biến đổi Z:
Giả sử x(t) là tín hiệu liên tục trong miền thời gian, lấy mẫu x(t) với chu kỳ lấy mẫu
T ta đƣợc chuỗi rời rạc x(k) = x(kT)
Biểu thức lấy mẫu x(t):
X * ( s) x(kT )e
k
kTs
(7.9)
Biểu thức biến đổi Z:
X ( z) x(k ) z
k
k
(7.10)
Vì z eTs nên vế phải của hai biểu thức (7.9) và (7.10) là nhƣ nhau, do đó bản chất
của việc biến đổi Z một tín hiệu chính là rời rạc hóa tín hiệu đó.
Phép biến đổi Z ngược
Cho X(z) là hàm theo biến phức z. Biến đổi Z ngƣợc của X(z) là:
1
x(k )
2 j C
X ( z ).z k 1dz
Với C là đƣờng cong kín bất kỳ nằm trong miền hội tụ ROC của X(z) và bao gốc tọa
độ.
7.2.2 Tính chất của phép biến đổi Z:
1. Tính tuyến tính:
x1 (k ) X 1 ( z)
Nếu
x2 (k ) X 2 ( z)
Thì a1 x1 (k ) a2 x2 (k ) a1 X 1 (k ) a2 X 2 ( z) (7.11)
2. Dời trong miền thời gian
Nếu
x(k ) X ( z)
Thì x(k k0 ) z k X ( z)
0
(7.12)
Nhận xét:
Nếu trong miền Z ta nhân X(z) voi thì tƣơng đƣơng với trong miền thời gian ta là trễ
tín hiệu chu kỳ lấy mẫu.
Vì x(k 1)
z 1 X ( z )
0
Nên đƣợc gọi là toán tử làm trễ 1chu kỳ lấy mẫu
3. Tỉ lệ trong miền Z
Nếu x(k )
X ( z)
148
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Thì a k x(k ) X (a 1 z) (7.13)
4. Đạo hàm trong miền Z
Nếu x(k )
X ( z)
dX ( z )
Thì kx(k ) z (7.14)
dz
5. Định lý giá trị đầu
Nếu x(k )
X ( z)
Thì x(0) lim X ( z ) (7.15)
z
6. Định lý giá trị cuối
Nếu x(k )
X ( z)
Thì x() lim (1 z 1 ) X ( z) (7.16)
z 1
7.2.3 Biến đổi Z của các hàm cơ bản
7.2.3.1 Hàm dirac
1 k 0
(k )
0 k 0
Theo định nghĩa:
(k ) (k ) z k
(0) z 0 1
k
Vậy (k ) 1
(ROC: toàn bộ mặt phẳng Z)
7.2.3.2 Hàm nấc đơn vị
Hàm nấc đơn vị (liên tục trong miền
thời gian):
1 t0
u (t )
0 t0
Lấy mẫu u (t) với chu kỳ lấy mẫu T, ta
đƣợc:
1 k 0
u (k )
0 k 0
Theo định nghĩa:
u (k ) u (k ) z k u (k ) z k
1 z 1 z 2 z
k k
Nếu z 1 thì biểu thức trên là tổng của cấp số nhân lùi vô hạn. Áp dụng công thức
1
tính tổng của cấp số nhân lùi vô hạn, ta dễ dàng suy ra:
1
u (k )
z
1
1 z z 1
149
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Vậy:
1 z
u (k ) 1
( ROC : z 1 )
1 z z 1
7.2.3.3 Hàm dốc đơn vị:
Hàm dốc đơn vị (liên tục trong miền
thời gian)
1 t0
r (t )
0 t0
Lấy mẫu r(t) với chu kỳ lấy mẫu là T, ta
đƣợc
kT k 0
r (k )
0 k 0
r (k ) kTu(k )
Ta tìm biến đổi Z của r(k) bằng cách áp dụng tính chất tỉ lệ trong miền Z:
Ta có:
1
u (k )
1 z 1
d 1 z 1
ku(k ) z
dz 1 z 1 1 z 1 2
Tz 1 Tz
kTu(k )
1 z
1 2 1 z 1
Vậy
Tz 1 Tz
r (k ) kTu(k ) ROC z 1
1 z
1 2 1 z 1
7.2.3.4 Hàm mũ
Hàm mũ liên tục trong miền thời gian:
e at t0
x(t )
0 t0
Lấy mẫu r(t) với chu kỳ lấy mẫu là T, ta
đƣợc
e kaT k 0
x(k )
0 k 0
x(k ) e kaT u (k )
Theo định nghĩa
150
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
x(k ) x(k ) z k
x(k ) z k
1 e aT z 1 e 2 aT z 2
k k
1 e aT z e z
1 aT 2
Nếu e aT z <1 thì biểu thức trên là tổng của cấp số nhân lùi vô hạn. Áp dụng công
1
thức tính tổng của cấp số nhân lùi vô hạn, ta suy ra:
1 z
x(k ) aT
1 e aT z 1
z e
Vậy
1 z
(e kaT )u (k )
ROC : e aT z 0 z e aT
1 e z aT
1
z e aT
Kết quả trên ta dễ dàng suy ra:
1 z
a k u (k ) 1
1 az za
7.2.4 Các phƣơng pháp tìm biến đổi Z ngƣợc:
Cho hàm X(z), bài toán đặt ra là tìm x(k). Theo công thức biến đổi Z ngƣợc, ta có:
1
x(k )
2 j C
X ( z ).z k 1dz
Với C là đƣờng cong kín bất kỳ nằm trong ROC của X(z) và bao gốc tọa độ.
Tìm x(k) bằng công thức trên rất phức tạp, thực tế ta thƣờng áp dụng các cách sau:
Cách 1: Phân tích X(z) thành tổng các hàm cơ bản, sau đó tra bảng biến đổi Z
Thí dụ 7.1:
Cho .
z
X ( z)
( z 2)( z 3)
Tìm x(k)
Lời giải
Phân tích X(z), ta đƣợc:
z z
X ( z)
( z 2) ( z 3)
Tra bảng biến đổi Z:
z
a k u (k )
za
Suy ra: x(k ) (2 k 3k )u(k )
Cách 2: Phân tích X(z) thành chuỗi lũy thừa:
Theo định nghĩa biến đổi Z:
X ( z ) x(k ) z k x(0).z 0 x(1).z 1 x(2).z 2 x(3).z 3
k 0
Do đó nếu phân tích X(z) thành tổng của chuỗi lũy thừa ta sẽ đƣợc giá trị x(k) chính là
hệ số của thành phần z k
Thí dụ 7.2:
151
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
z
Cho X ( z ) . Tìm x(k)
( z 2)( z 3)
Lời giải
z z
X ( z) 2
( z 2)( z 3) z 5 z 6
Chia đa thức, ta đƣợc
X ( z ) z 1 5z 2 19 z 3 65z 4
Suy ra
x(0) 0; x(1) 1; x(2) 5; x(3) 19; x(4) 65,....
Cách 3: Tính x(k) bằng công thức đệ qui
Thí dụ 7.3:
z
Cho X ( z ) . Tìm x(k)
( z 2)( z 3)
Lời giải
Ta có:
z z z 1
X ( z) 2
( z 2)( z 3) z 5 z 6 1 5 z 1 6 z 2
1 5 z 1 6 z 2 X ( z ) z 1
X ( z ) 5 z X ( z ) 6 z 2 X ( z ) z 1
1
Biến đổi Z ngƣợc hai vế phƣơng trình trên (để ý tính chất dời trong miền thời gian), ta
đƣợc:
x(k ) 5 x(k 1) 6 x(k 2) (k 1)
x(k ) 5 x(k 1) 6 x(k 2) (k 1)
Với điều kiện đầu:
x(k 1) 0
x
x(k 2) 0
Thay vào công thức trên ta đƣợc:
x(0) 0; x(1) 1; x(2) 5; x(3) 19; x(4) 65
Cách 4: Áp dụng công thức thặng dư:
x(k ) Re s z k 1 X ( z) tai cac cuc cua z k 1X ( z )
Nếu z 0 là cực bậc 1 thì :
Re s z k 1 X ( z ) z z0 ( z z0 ) z k 1 X ( z )
z z0
Nếu z 0 là cực bậc p thì:
Re s z k 1 X ( z ) z z0
1 d p1
( p 1)! dz p 1
z z0 p z k 1 X ( z ) z z0
Thí dụ 7.4:
z
Cho X ( z ) . Tìm x (k)
( z 2)( z 3)
Lời giải:
Áp dụng công thức thặng dƣ, ta đƣợc:
152
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
x(k ) Re s z k 1 X ( z) z 2 Re s z k 1 X ( z ) z 3
Mà
Re s z k 1 X ( z ) z 2 ( z 2) z k 1 X ( z )
z 2
z
( z 2) z k 1
( z 2)( z 3) z 2
k
z
2 k
( z 3) z 2
Re s z k 1
X ( z ) z 3 ( z 3) z k 1 X ( z )
z 3
z
( z 3) z k 1
( z 2)( z 3) z 3
k
z
3k
( z 2) z 3
Do đó:
x(k ) 2 k 3k
7.3. MÔ TẢ HỆ THỐNG RỜI RẠC BẰNG HÀM TRUYỀN
7.3.1 Hàm truyền của hệ rời rạc
Quan hệ giữa tín hiệu vào tín hiệu ra của hệ thống rời rạc đƣợc mô tả bằng phƣơng
trình sai phân:
a0 c(k n) a1c(k n 1) an1c(k 1) an c(k )
(7.17)
b0 r (k m) b1r (k m 1) bm1r (k 1) bm r (k )
Trong đó n m , n gọi là bậc của hệ thống rời rạc
Biến đổi Z hai vế phƣơng trình (7.17), ta đƣợc:
a0 z n C ( z ) a1 z n1C ( z ) an1 zC ( z ) an C ( z )
b0 z m R( z ) b1 z m1 R( z ) bm1 zR( z ) bm R( z )
a0 z n a1 z n1 an1 z an C ( z ) b0 z m b1 z m1 bm1 z bm R( z )
m 1
C ( z ) b0 z b1 z bm1 z bm
m
R( z ) a0 z n a1 z n1 an1 z an
Đặt
C ( z ) b0 z m b1 z m1 bm1 z bm
G( z ) (7.18)
R( z ) a0 z n a1 z n1 an1 z an
G(z) đƣợc gọi là hàm truyền của hệ thống rời rạc
Hàm truyền (7.18) có thể biến đổi tƣơng đƣơng về dạng:
G( z )
C ( z ) z ( nm ) b0 b1 z 1 bm1 z m1 bm z m (7.19)
R( z ) a0 a1 z 1 an1 z n1 an z n
Hai cách biểu diễn trên hoàn toàn tƣơng đƣơng nhau, trong thực tế hàm truyền dạng
thứ 2 đƣợc sử dụng nhiều hơn
Thí dụ 7.5: Cho hệ thống rời rạc mô tả bởi phƣơng trình sai phân:
c(k 3) 2c(k 2) 5c(k 1) 3c(k ) 2r (k 2) r (k )
153
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Tìm hàm truyền của hệ thống
Lời giải:
Biến đổi Z hai vế phƣơng trình sai phân mô tả hệ thống, ta đƣợc:
z 3C ( z ) 2 z 2 C ( z ) 5 zC ( z ) 3C ( z ) 2 z 2 R( z ) R( z )
C ( z) 2z 2 1
G( z) 3
R( z ) z 2 z 2 5 z 3
C ( z) z 1 (2 z 2 )
G( z)
R( z ) 1 2 z 1 5 z 2 3z 3
7.3.2 Tính hàm truyền hệ rời rạc từ sơ đồ khối
Khi thêm vào hệ thống liên tục các khâu lấy mẫu, khâu giữ dữ liệu (và bộ điều khiển
số) ta đƣợc hệ thống điều khiển rời rạc. Bài toán đặt ra là tìm hàm truyền hệ rời rạc theo
biến z từ sơ đồ khối có các khâu lấy mẫu. Xét một số sơ đồ thƣờng gặp sau đây:
7.3.2.1 Hai khâu nối tiếp cách nhau bởi khâu lấy mẫu
Hình 7.6. Hai khâu nối tiếp cách nhau bởi khâu lấy mẫu
C ( z)
G( z ) G1 ( z )G2 ( z ) (7.20)
R( z )
trong đó
G1 ( z ) G1 ( s)
G2 ( z ) G2 ( s)
Thí dụ 7.6
1 1
Cho G1 ( s) ; G2 ( s ) . tìm hàm truyền tƣơng đƣơng của hai hệ thống có sơ
sa sb
đồ khối ở hình 7.6.
Lời giải:
Tra bảng biến đổi Z, ta có:
1
G1 ( z ) G1 ( s )
z
aT
s a z e
1
G2 ( z ) G2 ( s )
z
bT
s b z e
Do đó dễ dàng suy ra:
z2
G1 ( z )G2 ( z )
z e aT z e bT
7.3.2.2 Hai khâu nối tiếp không cách nhau bởi khâu lấy mẫu
154
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Hình 7.7. Hai khâu nối tiếp không cách nhau bởi khâu lấy mẫu
C ( z)
G( z ) G1G2 ( z )
R( z )
Trong đó: G1G2 ( z) G1 (s)G2 (s)
Cần chú ý là: G1 ( z)G2 ( z) G1 (s)G2 (s) G1 (s)G2 (s) G1G2 ( z)
Thí dụ dƣới đây sẽ minh họa điều này
Thí dụ 7.7
1 1
Cho G1 ( s) ; G2 ( s) . Tìm hàm truyền tƣơng đƣơng của hai hệ thống có sơ
sa sb
đồ khối ở hình 7.7
Lời giải:
Tra bảng biến đổi Z, ta có:
1
G1G2 ( z ) G1 ( s )G2 ( s )
s a s b
1 1 1 1
b a s a a b s a
1 z 1 z
b a z e aT
a b z e bT
G1G2 ( z )
z e e bT aT
b a z e aT z e bT
Rõ ràng kết quả tính hàm truyền tƣơng đƣơng của hai hệ thống ở thí dụ 7.6 và 7.7
hoàn toàn khác nhau.
7.3.2.3 Hệ thống hồi tiếp có khâu lấy mẫu trong kênh sai số
C ( z) G( z )
Gk ( z ) (7.22)
R( z ) 1 GH ( z )
Trong đó
G ( z ) G( s)
GH ( z ) G( s).H ( s)
Trƣờng hợp H(s) =1 (hệ thống hồi tiếp âm đơn vị) ta có:
C ( z) G( z )
Gk ( z ) (7.23)
R( z ) 1 G ( z )
Thí dụ 7.8:
1 1
Cho G( s) ; H ( s) . Tìm hàm truyền tƣơng đƣơng của hai hệ thống có sơ đồ
sa sb
khối ở hình 7.7.
Lời giải:
155
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Thực hiện phép biến đổi Z tƣơng tự nhƣ đã làm ở thí dụ 7.6 và 7.7, ta dễ dàng tính
đƣợc:
1
G ( z ) G ( s)
z
bT
s a z e
1
GH ( z ) G ( s ) H ( s) .
1
z e bT e aT
s a s b b a z e
aT
z e bT
Thay vào công thức (7.22) ta đƣợc
z
Gk ( z )
C ( z)
G( z)
z e aT
R( z ) 1 GH ( z )
1
z e bT e aT
b a z e aT z e bT
Gk ( z )
b a z e bT
b a z e aT
z e bT
z e bT
e aT
7.3.2.4 Hệ thống nối tiếp có khâu lấy mẫu trong vòng hồi tiếp:
Trƣờng hợp này không tìm đƣợc biểu thức hàm truyền, quan hệ giữa tín hiệu vào và
tín hiệu ra nhƣ sau:
RG ( z )
C( z) (7.24)
1 G( z ) H ( z )
Trong đó:
RG ( z ) R( s)G( s)
G( z ) H ( z ) G( s)( H ( s)
7.3.2.5 Hệ thống hồi tiếp có các khâu lấy mẫu đồng bộ trong nhánh thuận
Hình 7.10: Hệ thống hồi tiếp có các khâu lấy mẫu đồng bộ trong nhánh thuận
C ( z) G( z )
Gk ( z ) (7.25)
R( z ) 1 G ( z ) H ( z )
Trong đó:
G( z ) G ( s)
H ( z ) H ( s)
7.3.2.6 Hệ thống hồi tiếp có các khâu lấy mẫu đồng bộ và các khâu nối tiếp ở nhánh
thuận
156
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Hình 7.11: Hệ thống hồi tiếp có các khâu lấy mẫu đồng bộ và các khâu nối tiếp ở nhánh
thuận
C ( z) G1 ( z )G2 ( z )
Gk ( z )
R( z ) 1 G1 ( z )G2 ( z )
Trong đó:
G1 ( z ) G1 ( s)
G2 ( z ) G2 ( s)
G2 H ( z ) G2 ( s) H ( s)
7.3.2.7 Sơ đồ dòng tín hiệu – Công thức Mason cho hệ rời rạc
Có thể mở rộng khái niệm sơ đồ dòng tín hiệu đã trình bày trong chƣơng 2 cho hệ liên
tục để áp dụng vào hệ rời rạc với một vài thay đổi nhỏ. Để sử dụng công thức Mason cho
hệ rời rạc cần để ý các nguyên tắc dƣới nhƣ sau:
Nếu không có lấy bộ mẫu giữa đầu vào R(s) và khâu đầu tiên trong vòng thuận (ví
dụ nhƣ G(s) thì không thể tách biệt biến đổi Z của đầu vào và khâu đầu tiên và ta
luôn có số hạng RG(z). Do đó trong trƣờng hợp này không thể tính đƣợc hàm
truyền bằng tỉ lệ giữa biến đổi Z tín hiệu ra và tín hiệu vào của hệ thống.
Nếu một khâu trong vòng thuận hay trong vòng hồi tiếp phân biệt với đầu vào, đầu
ra của hệ thống và với các khâu khác bởi các bộ lấy mẫu ở đầu vào và đầu ra của
nó thì nó hoàn toàn độc lập về biến đổi Z.
Nếu một khâu trong vòng thuận hay vòng hồi tiếp không phân biệt với các khâu kế
cận hay với đầu vào của hệ thống bởi bộ lấy mẫu thì phải thực hiện phép biến đổi
Z của hàm truyền kết hợp của hai khâu hay giữa khâu đó với đầu vào.
Dùng lý thuyết Mason và ba nguyên tắc trên cho hệ rời rạc, sinh viên có thể kiểm
chứng đƣợc các công thức tính hàm truyền đã dẫn ra trong mục 7.3.2 này.
7.4 MÔ TẢ HỆ THỐNG RỜI RẠC BẰNG PHƢƠNG TRÌNH TRẠNG THÁI
7.4.1 Thành lập phƣơng trình trạng thái từ phƣơng trình sai phân
7.4.1.1 Vế phải của phương trình sai phân không chứa sai phân của tín hiệu vào
Xét hệ thống rời rạc có quan hệ giữa tín hiệu vào và tín hiệu ra mô tả bởi phƣơng trình
sai phân:
c(k n) a1c(k n 1) an1c(k 1) an c(k ) b0 r (k ) (7.26)
Chú ý: ở phƣơng trình trên hệ số . Nếu ta chia hai vế cho để đƣợc phƣơng trình sai phân
có dạng (7.26).
Tƣơng tự nhƣ đã làm đối với hệ liên tục, ta đặt các biến trạng thái để biến đổi tƣơng
đƣơng phƣơng trình sai phân bậc n ở trên thành hệ n phƣơng trình sai phân bậc 1.
Đặt các biến trạng thái nhƣ sau:
157
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
x1 (k ) c(k )
x2 (k ) x1 (k 1) x2 (k ) c(k 1)
x3 (k ) x2 (k 1) x3 (k ) c(k 2)
xn (k ) xn1 (k 1) xn (k ) c(k n 1) xn k 1 c(k n)
Thay vào phƣơng trình (7.26) ta đƣợc:
xn (k 1) a1 xn (k ) an1 x2 (k ) an x1 (k ) b0 r (k )
xn (k 1) a1 xn (k ) an1 x2 (k ) an x1 (k ) b0 r (k )
Kết hợp phƣơng trình trên với các biểu thức đặt biến trạng thái ta đƣợc hệ phƣơng trình
sau:
x1 (k 1) x2 (k )
x (k 1) x (k )
2 3
x (k 1) x (k )
n1 n
xn (k 1) axn (k ) an1 x2 (k ) an x1 (k ) b0 r (k )
Viết lại dƣới dạng ma trận:
x1 (k 1) 0 1 0 0 0 x1 (k ) 0
x (k 1)
2 0 0 1 0 0 x2 (k ) 0
r (k )
xn1 (k 1) 0 0 0 0 1 xn1 (k ) 0
xn (k 1) an an1 an2 a2 a1 xn (k ) b0
Đáp ứng của hệ thống:
x1 (k )
x (k )
1
c(k ) x1 (k ) 1 0 0 0
xn1 (k )
xn (k )
Đặt:
x1 (k 1) 0 1 0 0 0
x (k 1) 0
2 0 1 0 0
x(k ) Ad
xn1 (k 1) 0 0 0 0 1
xn (k 1) an an1 an 2 a2 a1
158
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
0
0
Bd Dd 1 0 0 0
0
b0
Ta đƣợc hệ phƣơng trình biến thái:
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k )
Thí dụ 7.9:
Cho hệ thống điều khiển rời rạc mô tả bởi phƣơng trình sai phân:
2c(k 3) c(k 2) 5c(k 1) 4c(k ) 3r (k )
Hãy viết hệ phƣơng trình biến trạng thái mô tả hệ thống.
Lời giải:
Ta có:
2c(k 3) c(k 2) 5c(k 1) 4c(k ) 3r (k )
c(k 3) 0.5c(k 2) 2.5c(k 1) 2c(k ) 1.5r (k )
Đặt biến trạng thái nhƣ sau
x1 (k ) c(k )
x2 (k ) x1 (k 1)
x3 (k ) x2 (k 1)
Hệ phƣơng trình biến trạng thái mô tả hệ thống đã cho là:
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k )
Trong đó:
x1 (k )
x(k ) x2 (k )
x3 (k )
0 1 0 0 1 0
Ad 0 0
1 0 0 1
a3 a2 a1 2 2.5 0.5
0 0
Bd 0 0
b0 1.5
Dd 1 0 0
7.4.1.2 Vế phải của phương trình sai phân có chứa sai phân của tín hiệu vào
Xét hệ thống rời rạc có quan hệ giữa tín hiệu vào và tín hiệu ra mô tả bởi phƣơng trình
sai phân:
c(k n) a1c(k n 1) an1c(k 1)an c(k )
(7.27)
b0 r (k n) b1r (k n 1) bn1r (k 1) bn r (k )
159
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Chú ý: Ở phƣơng trình trên hệ số a0 1 . Nếu a0 1 ta chia hai vế cho để đƣợc phƣơng
trình sai phân có dạng (7.27).
Đặt các biến trạng thái nhƣ sau:
x1 (k ) c(k ) 0 r (k )
x2 (k ) x1 (k 1) 1r (k )
x3 (k ) x2 (k 1) 2 r (k )
xn (k ) xn1 (k 1) n1r (k )
Từ cách biến trạng thái trên ta rút ra phƣơng trình sau:
xn (k 1) an x1 (k ) an1 x2 (k ) a1 xn (k ) n r (k )
Trong đó:
0 b0
1 b1 a1 0
2 b2 a11 a2 0
3 b3 a1 2 a2 1 a3 0
4 b4 a13 a2 2 a3 1 a4 0
n bn a1 n 1 a2 n 2 a3 n 3 a4 n 4 an 11 an 0
Do đó hệ phƣơng trình biến trạng thái mô tả hệ thống có dạng:
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k ) Ed r (k )
Trong đó:
x1 (k ) 0 1 0 0 0
x (k ) 0 0 1 0 0
2
x(k ) Ad
x n 1 (k ) 0 0 0 0 1
x n (k ) an an1 an 2 a2 a1
1
2
Bd Dd 1 0 0 0 Ed 0
n1
n
Thí dụ 7.10:
Cho hệ thống rời rạc mô tả bởi phƣơng trình sai phân:
2c(k 3) c(k 2) 5c(k 1) 4c(k ) r (k 2) 3r (k )
Hãy viết hệ phƣơng trình trạng thái mô tả hệ thống trên.
Lời giải:
Ta có:
160
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
2c(k 3) c(k 2) 5c(k 1) 4c(k ) r (k 2) 3r (k )
c(k 3) 0.5c(k 2) 2.5c(k 1) 2c(k ) 0.5r (k 2) 1.5r (k )
Đặt các biến trạng thái:
x1 (k ) c(k ) 0 r (k )
x 2 (k ) x1 (k 1) 1 r (k )
x3 (k ) x 2 (k 1) 2 r (k )
x3 (k 1) a3 x1 (k ) a 2 x 2 (k ) a1 x3 (k ) 3 r (k )
Trong đó:
0 b0 0
1 b1 a1 0 0.5 0.5 0 0.5
2 b2 a11 a2 0 0 0.5 0.5 2.5 0 0.25
3 b3 a12 a2 1 a30 1.5 0.5 0.25 2.5 0.5 0.375
Hệ phƣơng trình biến trạng thái có dạng:
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k ) E d r (k )
Trong đó:
x1 (k )
x(k ) x 2 (k )
x3 (k )
0 1 0 0 1 0
Ad 0 0
1 0 0 1
a3 a 2 a1 2 2.5 0.5
0.5
Bd 0.25 Dd 1 0 0 Ed 0
0.375
7.4.2 Thành lập phƣơng trình trạng thái từ hàm truyền hệ rời rạc
Cho hệ thống mô tả bởi hàm truyền:
C ( z ) b0 z m b1 z m1 bm1 z bm
G( z )
n (7.28)
R( z ) z a1 z n1 an1 z an
Chú ý: Ở hàm truyền trên hệ số a0 1 . Nếu a0 1 ta chia tử số và mẫu số cho a0 để đƣợc
hàm truyền có dạng (7.28).
Cách 1: Biến đổi tƣơng đƣơng hàm truyền về dạng phƣơng trình sai phân:
C ( z ) b0 z m b1 z m1 bm1 z bm
G( z ) n
R( z ) z a1 z n1 an1 z an
z n a1 z n 1 a n 1 z a n C ( z ) b0 z m b1 z m1 bm1 z bm R( z )
c(k n)a1c(k n 1) a n 1c(k 1) a n c(k )
b0 r (k m) b1 r (k m 1) bn 1 r (k 1) bn r (k )
161
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Áp dụng phƣơng pháp đã trình bày ở mục 7.4.1.2 ta rút ra đƣợc hệ phƣơng trình
biến trạng thái.
Thí dụ 7.11 Hãy thành lập hệ phƣơng trình trạng thái mô tả hệ thống có hàm truyền là:
C ( z) z2 3
G( z ) 3
R( z ) 2 z z 2 5 z 4
Lời giải:
Cách 1: Hàm truyền đã cho tƣơng đƣơng với:
C( z) 0.5 z 2 1.5
G( z ) 3
R( z ) z 0.5 z 2 2.5 z 2
z 3 0.5 z 2 2.5 z 2 C ( z ) 0.5 z 2 1.5 R( z )
c(k 3) 0.5c(k 2) 2.5c(k 1) 2c(k ) 0.5r (k 2) 1.5r (k )
Xem tiếp lời giải đã trình bày ở thí dụ 7.10.
C ( z ) b0 z m b1 z m1 bm1 z bm
Cách 2: Do G( z ) n
R( z ) z a1 z n1 an1 z an
nên ta có thể đặt biến phụ E(z) sao cho:
C ( z ) b0 z m b1 z m1 bm1 z bm E ( z) (7.29)
R( z) z n
a1 z n 1
an1 z an E ( z) (7.30)
(7.30) e(k n) a1e(k n 1) an1e(k 1) ane(k ) r (k )
Áp dụng phƣơng pháp đã trình bày ở mục 7.4.1.1, đặt các biến trạng thái:
x1 (k ) e(k )
x2 (k ) x1 (k 1) x2 (k ) e(k 1)
x3 (k ) x2 (k 1) x3 (k ) e(k 2)
xn (k ) xn1 (k 1) xn (k ) e(k n 1) xn (k 1) e(k n)
Ta đƣợc phƣơng trình:
x1 (k 1) 0 1 0 0 0 x1 (k ) 0
x (k 1)
2 0 0 1 0 0 x2 (k ) 0
r (k )
xn1 (k 1) 0 0 0 0 1 xn1 (k ) 0
xn (k 1) an an1 an2 a2 a1 xn (k ) b0
(7.29) c(k ) b0 e(k m) b1e(k m 1) bm 1e(k 1)(k 1) bm e(k )
c(k ) b0 x m 1 (k ) b1 x m (k ) bm 1 x 2 (k ) bm x1 (k )
x1 (k )
x (k )
2
c(k ) bm bm 1 b1 b0 0 0
x n 1 (k )
x n (k )
Tóm lại ta đƣợc hệ phƣơng trình trạng thái:
162
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
x(k 1) Ad x(k ) Bd r (k )
c ( k ) Dd x ( k )
Trong đó:
x1 (k ) 0 1 0 0 0
x (k ) 0 0 1 0 0
2
x(k ) Ad
x n 1 (k ) 0 0 0 0 1
x n (k ) an an 1 an 2 a2 a1
0
0
Bd Dd bm bm1 b1 b0 0 0
0
1
Thí dụ 7.12: Cho hệ thống mô tả bởi hàm truyền:
C ( z) z2 3
G( z ) 3
R( z ) 2 z z 2 5 z 4
Hãy thành lập hệ phƣơng trình trạng thái.
Lời giải: Hàm truyền đã cho tƣơng đƣơng với:
C ( z) 0.5 z 2 1.5
G( z ) 3
R( z ) z 0.5 z 2 2.5 z 2
Đặt biến phụ E(z) sao cho:
C ( z ) 0.5 z 2 1.5 E ( z )
R( z ) z 3
0.5 z 2 2.5 z 2 E ( z )
c(k ) 0.5c(k 2) 1.5c(k )
r ( z ) e(k 3) 0.5e(k 2) 2.5e(k 1) 2e(k )
Đặt biến trạng thái:
x1 (k ) e(k )
x2 (k ) x1 (k 1)
x3 (k ) x2 (k 1)
Ta đƣợc hệ phƣơng trình:
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k )
Trong đó:
x1 (k )
x(k ) x2 (k )
x3 (k )
163
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
0 1 0 0 1 0
Ad 0 0
1 0 0 1
a3 a2 a1 2 2.5 0.5
0
Bd 0
1
Dd b2 b1 b0 1.5 0 0.5
Thí dụ 7.13: Hãy thành lập hệ phƣơng trình trạng thái mô tả hệ thống có hàm truyền là:
C( z) 2z 1
G( z ) 4
R( z ) z 2 z z 2 5 z 3
3
Lời giải: Đặt biến phụ E(z) sao cho:
C ( z ) (2 z 1) E ( z )
R( z ) z 2 z z 5 z 3
4 3 2
c(k ) 2e(k 1) e(k )
r ( z ) e(k 4) 2e(k 3) e(k 2) 5e(k 1) 3e(k )
Đặt biến trạng thái:
x1 (k ) e(k )
x2 (k ) x1 (k 1)
x3 (k ) x2 (k 1)
x4 (k ) x3 (k 1)
Ta đƣợc hệ phƣơng trình
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k )
x1 (k )
x (k )
Trong đó: x(k ) 2
x3 (k )
x4 ( k )
0 1 0 0 0 1 0 0
0 0 1
0 0 0 1 0
Ad
0 0 0 1 0 0 0 1
a4 a3 a2 a1 3 5 1 2
0
0
Bd Dd b1 b0 0 0 1 2 0 0
0
1
7.4.3 Thành lập phƣơng trình trạng thái hệ rời rạc từ phƣơng trình trạng thái hệ
liên tục:
Phƣơng pháp này chỉ áp dụng đƣợc cho hệ thống có sơ đồ khối nhƣ sau:
164
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
TRÌNH TỰ THÀNH LẬP PHƢƠNG TRÌNH TRẠNG THÁI
Bước 1: Thành lập hệ phƣơng trình biến trạng thái hệ liên tục:
x (t ) Ax (t ) Be R (t )
c(t ) Dx(t )
Bước 2: Tính ma trận quá độ của hệ liên tục:
(t ) L1 (s)
Với: (s) (sI A) 1
Bước 3: Rời rạc hóa phƣơng trình biến trạng thái ở bƣớc 1, ta đƣợc:
x(k 1)T Ad x(kT ) Bd r (kT )
c(kT ) Dd x(kT )
Ad (T )
T
Trong đó: Bd Bd
0
Dd D
Bước 4: Hệ phƣơng trình biến trạng thái của hệ rời rạc cần tìm với tín hiêu vào
r(kT) là:
x(k 1)T Ad Bd Dd x(kT ) Bd r (kT )
c(kT ) Dd x(kT )
Chứng minh:
Bước 1 và bước 2 thành lập phƣơng trình trạng thái và tính ma trận quá độ của hệ liên tục
không có gì phải chứng minh. Ta chứng minh từ bƣớc 3, ở bƣớc này ta suy ra phƣơng
trình trạng thái của hệ rời rạc từ phƣơng trình trạng thái của hệ liên tục.
Bước 3: Ở chƣơng 2, ta đã biết nghiệm của phƣơng trình trạng thái hệ liên tục cho bởi
công thức:
T
x(t ) (t t 0 ) x(t 0 ) Be R d
0
Tổng quát:
T
x(t ) (t t 0 ) x(t 0 ) t 0 Be R d
0
Áp dụng công thức trên với:
t 0 kT
t (k 1)T
165
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Ta đƣợc:
( k 1)T
x(k t )T (T ) x(kT ) kT Be d
R
kT
Ta lại có:
eR e(kT ), : kT (k 1)T
(do eR ( ) là tín hiệu ở ngõ ra của khâu giữ ZOH)
Thay vào công thức trên, ta đƣợc:
( k 1)T
x(k t )T (T ) x(kT ) kT BekT d
kT
Do e(kT) không phụ thuộc vào biến lấy tích phân nên:
( k 1)T
x(k t )T (T ) x(kT ) kT Bd ekT
kT
Đổi biến phép tính lấy tích phân, ta đƣợc:
T
x(k t )T (T ) x(kT ) Bd eR kT (7.31)
Ad 0
Bd
Rời rạc hóa phƣơng trình ngõ ra của hệ liên tục, ta đƣợc:
c(kT ) Dd x(kT )
Bước 4: Theo sơ đồ khối của hệ thống, ta thấy:
e(kT ) r (kT ) c(kT ) r (kT ) Dd x(kT )
Thay vào phƣơng trình (7.31) ta đƣợc kết quả cần chứng minh.
Thí dụ 7.14 Cho hệ thống rời rạc có sơ đồ nhƣ hình vẽ. Hãy thành lập hệ phƣơng trình
biến trạng thái mô tả hệ thống với các biến trạng thái đƣợc xác định trên hình vẽ.
Lời giải:
Bước 1: Thành lập hệ phƣơng trình biến trạng thái mô tả hệ liên tục:
Theo hình vẽ ta có:
X 2 ( s)
X 1 ( s) sX1 ( s) X 2 ( s)
s
x1 (t ) x2 (t ) (7.32)
E ( s)
X 2 ( s) R ( s a) X 2 ( s) E R ( s)
sa
x2 (t ) ax2 (t ) eR (t )
x 2 (t ) ax2 (t ) eR (t ) (7.33)
Kết hợp (7.32) và (7.33) ta đƣợc hệ phƣơng trình:
166
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
x 1 ( t ) x 2 ( t )
x 2 ( t ) ax 2 ( t ) e R ( t )
x ( t ) 0 1 x 1 ( t ) 0
1 e R (t )
x 2 ( t ) 0 a x 2 ( t ) 1
x (t ) Ax(t ) BeR (t ) (7.34)
Đáp ứng của hệ thống:
x (t )
c(t ) Kx1 (t ) K
0 1 Dx(t )
x2 (t )
0 1 0
Do đó: A B 1 D K 0
0 a
Bước 2: Tính ma trận quá độ
1
1 0 0 1 s 1
( s) ( sI A) s
1
0 s a
0 1 0 a
1 1
1 1
s s( s a)
s a
s( s a) 0 s 1
0
s a
1 1 1 1 1 1
1 s
L s L s ( s a)
(t ) L ( s ) L
1 s ( s a )
0 1 0 1
L1
s a s a
1
1
a
1 e aT
0 e aT
Bước 3: Rời rạc hóa các phƣơng trình trạng thái của hệ liên tục, ta đƣợc:
x(k 1)T Ad x(kT ) Bd e(kT )
c(kT ) Dd x(kT )
Trong đó:
1 1
1 (1 e at ) 1 (1 e aT )
Ad (T ) a a
0 e at 0 e aT
t T
T 1 T 1
1 (1 e a ) 0 (1 e a ) 0
T
Bd ( ) Bd a 1 d a 1 d
0 0
a a
0
e 0
e
T
e a T e aT 1
2 a 2 a 2
a aa a
e e aT 1
a 0 a a
167
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Dd D K 0
Bước 4: Hệ phƣơng trình biến trạng thái mô tả hệ thống rời rạc với tín hiệu vào r(kT) là:
x(k 1)T Ad Bd Dd x(kT ) Bd r (kT )
c(kT ) Dd x(kT )
Trong đó:
T e aT 1
1 aT 2 2
(1 e ) a
Ad Bd Dd 1 a a a K 0
0 aT e aT
1
e
a a
T e aT 1
1 K 0
1 (1 e aT ) a a2 a 2
a
0 e aT 1
0
aT
e K
a a
T e aT 1 1
1 K 2 2 (1 e aT
Ad Bd D d a a a a
e aT
1
K e aT
a a
Thí dụ bằng số cụ thể: a =2, T = 0.5 sec, K =10
0 1 0
Bước 1: A B D 10 0
0 2 1
1 1
1 (1 e at ) 1 (1 e 2t )
Bước 2: (t ) a 2
0 at e 2t
e 0
Bước 3:
1 1
1 (1 e aT ) 1 (1 e 20.5 ) 1 0.316
Ad
0 0.368
a 2
0 aT 0 20.5
e e
T e aT
1 0.5 e 20.5
1
2 2 2
Bd a aaT a 2 2 2
2 0.092
e 1 e 20.5 1 0.216
a a 2 2
Dd D 10 0
Bước 4:
168
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
Ad Bd Dd
1 0.316 0.092
10 0
0 0.368 0.316
1 0.316 0.920 0 0.080 0.316
0 0.368 3.160 0 3.160 0.368
Kết luận: Hệ phƣơng trình biến trạng thái cần tìm là:
x1 (k 1) 0.080 0.316 x1 (k ) 0.092
x (k 1) 3.160 0.368 x (k ) 0.316 r (k )
2 2
x (k )
c(k ) 10 0 1
x 2 (k )
7.4.4 Tính hàm truyền hệ rời rạc từ hệ phƣơng trình trạng thái
Cho hệ thống rời rạc mô tả bởi hệ phƣơng trình biến trạng thái:
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k )
C ( z)
Bài toán đặt ra là tìm hàm truyền: G ( z )
R( z )
Biến đổi Z hệ phƣơng trình trạng thái, ta đƣợc:
zX ( z ) Ad X ( z ) Bd R( z )
C ( z ) Dd X ( z )
( zI Ad ) X ( z ) Bd R( z )
C ( z ) Dd X ( z )
X ( z ) [ zI Ad ]1 Bd R( z )
C ( z ) Dd X ( z )
C ( z ) Dd [ zI Ad ]1 Bd R( z )
Lập tỉ số, ta đƣợc:
C ( z)
G( z ) Dd [ zI Ad ]1 Bd (7.35)
R( z )
Thí dụ 7.15: Cho hệ thống mô tả bởi phƣơng trình trạng thái:
x(k 1)T Ad Bd Dd x(kT ) Bd r (kT )
c(kT ) Dd x(kT )
0 1 0
Trong đó: Ad ; Bd ; Dd D 1 0
0.7 0.1 2
Hãy viết hàm truyền của hệ thống trên.
Lời giải:
Áp dụng công thức (7.35), hàm truyền của hệ thống là:
C ( z)
Dd zI Ad Bd
1
G( z )
R( z )
Ta có:
169
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 7: Mô tả toán học hệ thống điều khiển rời rạc
1 1
z 0 0 1 z 1
zI Ad 1
0 z 0.7 0.1 0.7 z 0.1
1 z 0.1 1
z ( z 0.1) 0.7 0.7 0.1
1 z 0.1 1 0 1 2
zI Ad 1 Bd
z ( z 0.1) 0.7 0.7 0.1 2 z ( z 0.1) 0.7 2 z
1 2 2
Dd zI Ad Bd
1
[1 0]
z ( z 0.1) 0.7 2 z z ( z 0.1) 0.7
2
Vậy: G( z ) 2
z 0.1z 0.7
170
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Chương 8
PHÂN TÍCH VÀ THIẾT KẾ RỜI RẠC
8.1 KHẢO SÁT TÍNH ỔN ĐỊNH
8.1.1 Khái niệm về tính ổn định của hệ rời rạc
Ở chƣơng 4 chúng ta đã xét khái niệm ổn định của hệ liên tục, hệ thống đƣợc gọi là
ổn định nếu tín hiệu vào bị chặn thì tín hiệu ra bị chặn. Chúng ta cũng đã dẫn ra đƣợc điều
kiện để hệ liên tục ổn định là tất cả các nghiệm của phƣơng trình đặc trƣng đều nằm bên
trái mặt phẳng thức theo biến s, nói cách khác tất cả các nghiệm của phƣơng trình đặc
trƣng của hệ liên tục phải có phần thực âm. Do phép biến đổi Z và phép biến đổi Laplace
có mối liên hệ z eTs (với T là chu kỳ lấy mẫu) nên s có phần thực âm tƣơng đƣơng với
z 1 , hay z nằm trong vòng tròn đơn vị. Vì vậy điều kiện để hệ rời rạc ổn định là tất cả
các nghiệm của phƣơng trình đặc trƣng đều phải nằm bên trong vòng tròn đơn vị của mặt
phẳng phức theo biến z. Hình 8.1 minh hoạ miền ổn định của hệ liên tục và hệ rời rạc.
Nhƣ vậy tƣơng tự nhƣ đã làm đối với hệ liên tục, để đánh giá tính ổn định của hệ
rời rạc ta chỉ cần khảo sát phƣơng trình đặc trƣng. Sau đây là phƣơng trình đặc trƣng của
hai dạng mô tả hệ rời rạc thƣờng gặp:
- Hệ thống rời rạc cho bởi sơ đồ khối:
Phƣơng trình đặc trƣng là:
1 GH ( z) 0 (8.1)
- Hệ thống rời rạc cho hệ phƣơng trình biến trạng thái:
x(k 1) Ad x(k ) Bd r (k )
c(k ) Dd x(k )
Phƣơng trình đặc trƣng là :
det(zI Ad ) 0 (8.2)
Đối với các hệ rời rạc có mô tả toán học khác hai dạng trên, tham khảo chƣơng 7
để rút ra phƣơng trình đặc trƣng.
Để thiết kế hệ điều khiển rời rạc, yêu cầu tối thiểu trƣớc tiên là hệ phải ổn định. Về
cơ bản, kỹ thuật phân tích và đánh giá độ ổn định của hệ tuyến tính liên tục cũng có thể áp
dụng cho hệ rời rạc với một số sửa đổi cần thiết. Đó là những tiêu chuẩn ổn định tần số
Nyquist – Bode, phƣơng pháp quỹ đạo nghiệm số … Đối với hệ điều khiển rời rạc còn có
thêm tiêu chuẩn đại số Jury đƣợc sử dụng để kiểm tra tính ổn định của hệ. Song cũng nhƣ
các tiêu chuẩn ổn định đại số khác nhƣ Routh – Hurwitz, kết luận của tiêu chuẩn Jury
cũng chỉ cho biết hệ có ổn định hay không, nhƣng không cho biết vị trí các nghiệm trong
171
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
mặt phẳng Z. Nếu kết quả cho thấy hệ ổn định thì có thể khẳng định đƣợc tất cả các
nghiệm đều nằm trong vòng tròn đơn vị nhƣ thế nào. Trái với tiêu chuẩn ổn định đại số,
phƣơng pháp phân tích đáp ứng tần số không chỉ xác định tính ổn định mà còn chỉ ra cần
thiết kế nhƣ thế nào để hệ từ không ổn định trở nên đạt chỉ tiêu chất lƣợng mong muốn.
Sau đây chúng ta sẽ lần lƣợt trình bày các kỹ thuật đánh giá tính ổn định đã kể trên.
8.1.2 Tiêu chuẩn Routh – Hurwitz mở rộng
Tiêu chuẩn Routh – Hurwitz cho phép đánh giá phƣơng trình đại số
a0 x a1x n 1 ... an 1x an 0 có nghiệm nằm bên phải mặt phẳng phức hay không. Ở
n
chƣơng 4 ta đã sử dụng kết quả này để đánh giá số nghiệm nằm bên phải mặt phẳng phức
của phƣơng trình đặc trƣng của hệ liên tục a0 s n a1s n 1 ... an 1s an 0 . Nếu phƣơng
trình nói trên có nghiệm nằm bên phải mặt phẳng phức thì hệ liên tục không ổn định. Tuy
nhiên, ta không thể sử dụng trực tiếp tiêu chuẩn Routh-Hurwitz để đánh giá tính ổn định
của hệ rời rạc vì miền ổn định của hệ rời rạc nằm bên trong đƣờng tròn đơn vị. Muốn
dùng tiêu chuẩn Routh – Hurwitz để đánh giá tính ổn định của hệ rời rạc ta phải thực hiện
phép biến đổi:
w 1
z (8.3)
w 1
z 1
w (8.4)
z 1
Với cách biến đổi nhƣ trên, miền nằm trong vòng trong đơn vị của mặt phẳng z
biến nửa trái của mặt phẳng w(xem hình 8.2). Sau đó ta áp dụng tiêu chuẩn Routh –
Hurwitz đối với phƣơng trình đặc trƣng theo biến, nếu không tồn tại nghiệm w nằm bên
phải mặt phẳng phức thì không tồn tại nghiệm z nằm ngoài vòng tròn đơn vị, khi đó ta kết
luận hệ rời rạc ổn định. Tiêu chuẩn xét ổn định nhƣ trên gọi là tiêu chuẩn Routh-Hurwitz
mở rộng.
Thí dụ 8.1: Cho hệ thống rời rạc có phƣơng trình đặc trƣng:
5 z 3 2 z 2 3z 1 0
Xét tính ổn định của hệ thống trên
w 1
Lời giải: Đổi biến z , phƣơng trình đặc trƣng trở thành:
w 1
3 2
w 1 w 1 w 1
5 2 3 1 0
w 1 w 1 w 1
5w 1 2w 1 w 1 3w 1w 1 w 1 0
3 2 2 3
5 w3 3w2 3w 1 2 w3 w2 w 1 3 w3 w2 w 1 w3 3w2 3w 1 0
11w 11w 13w 5 0
3 2
Đến đây ta có thể dùng tiêu chuẩn Routh hoặc tiêu chuẩn Hurwitz
Cách 1: Bảng Routh
w3 11 13
2
w 11 5
1
w 8 0
0
w 5
172
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Do tất cả các hệ số ở cột 1 bảng Routh đều dƣơng nên hệ ổn định.
Cách 2: Ma trận Hurwitz
a1 a3 0 11 5 0
a a 0 11 13 0
0 2
0 a1 a3 0 11 5
1 11 0
2 11x13 5 x11 0
3 5 2 0
Do các định thức con của ma trận Hurwitz đều dƣơng nên hệ ổn định
8.1.3 Tiêu chuẩn Jury
Xét hệ rời rạc có phƣơng trình đặc trƣng:
a0 z n a1z n 1 ... an 1z an 0
Để đánh giá tính ổn định của hệ rời rạc có phƣơng trình đặc trƣng (8.5) bằng tiêu
chuẩn Jury, trƣớc tiên ta phải lập bảng Jury theo qui tắc sau:
1. Bảng Jury gồm có (2n+1) hàng. Hàng 1 là các hệ số của phƣơng trình đặc
trƣng (8.5) theo thứ tự chỉ số tăng dần.
2. Hàng chẳn (bất kỳ) gồm các hệ số của hàng lẻ trƣớc đó viết theo thứ tự ngƣợc
lại.
3. Hàng lẻ thứ i 2k 1(k 1) gồm có (n k 1) phần tử, phần tử cij ở hàng i cột j
xác định công thức:
1 ci 2,1 ci 2, n j k 2
cij (8.6)
ci 2,1 ci 1,1 ci 1, n j k 2
Phát biểu tiêu chuẩn Jury
Điều khiển cần và đủ để hệ thống rời rạc có phƣơng trình đặc trƣng (8.5) ổn
định là tất cả các hệ số ở hàng lẻ, cột 1 của bảng Jury đều dƣơng.
Thí dụ 8.2: Cho hệ thống rời rạc có phƣơng trình đặc trƣng ở thí dụ 8.1:
5 z 3 2 z 2 3z 1 0
Xét tính ổn định của hệ thống trên dùng tiêu chuẩn Jury.
Lời giải:
Bảng Jury
Hàng 1 5 2 3 4
Hàng 2 1 3 2 5
Hàng 3 15 1 15 3 15 2
4.8 1.4 2.6
51 5 51 2 51 3
Hàng 4 2.6 1.4 4.8
Hàng 5 1 4.8 2.6 1 4.8 1.4
3.39 0.61
4.8 2.6 4.8 4.8 2.6 1.4
Hàng 6 0.61 3.39
173
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Hàng 7 1 3.39 0.61 1 4.8 2.6
3.28 3.39
3.39 0.61 3.39 4.8 2.6 4.8
Do các hệ số ở hàng Jury đều dƣơng nên hệ thống ổn định. Kết luận này hoàn toàn
phù hợp với kết luận ở thí dụ 8.1.
8.1.4 Quỹ đạo nghiệm số
Tƣơng tự nhƣ hệ liên tục, đối với hệ rời rạc chúng ta cũng có khái niệm quỹ đạo
nghiệm số (QĐNS). QĐNS là tập hợp tất cả các nghiệm của phƣơng trình đặc trƣng của
hệ thống khi có một thông số nào đó trong hệ thay đổi từ o .
Xét hệ thống rời rạc có phƣơng trình đặc trƣng là:
N ( z)
1 K 0 (8.7)
D( z )
N ( z)
Đặt: G0 ( z ) K (8.8)
D( z )
Gọi n là số cực của G0 ( z ) , m là số zero của G0 ( z )
(8.7) 1 G0 ( z) 0 (8.9)
G0 ( z ) 1 Điều kiện biên độ
Điều kiện pha
G0 ( z ) (2l 1)
Vì dạng phƣơng trình đặc trƣng của hệ liên tục đã khảo sát ở chƣơng 4 và phƣơng trình
đặc trƣng (8.7) là nhƣ nhau (chỉ thay biến s bằng biến z) nên qui tắc vẽ QĐNS là nhƣ
nhau, chỉ khác ở qui tắc 8, thay vì đối với hệ liên tục ta tìm giao điểm của QĐNS với trục
ảo thì đối với hệ rời rạc ta tìm giao điểm của QĐNS với đƣờng tròn đơn vị. Sau đây là 11
qui tắc vẽ quỹ đạo nghiệm số của hệ thống rời rạc cớ phƣơng trình đặc trƣng có dạng
(8.7).
Chú ý: Nếu phƣơng trình đặc trƣng của hệ không có dạng (8.7) thì ta phải biến đổi tƣơng
đƣơng về dạng (8.7) trƣớc khi áp dụng các qui tắc vẽ QĐNS.
Qui tắc 1: Số nhánh của quỹ đạo nghiệm số = bậc của phƣơng trình đặc trƣng = số cực
của G0 ( z ) n
Qui tắc 2: Khi K=0: các nhánh của quỹ đạo nghiệm số xuất phát từ các cực của G0 ( z )
Khi K tiến đến : nhánh của quỹ đạo nghiệm số tiến đến m zero của G0 ( z ) ,
n-m nhánh còn lại tiến đến theo các tiệm cận xác định bởi qui tắc 5 và 6.
Qui tắc 3: Quỹ đạo nghiệm số đối xứng qua trục thực.
Qui tắc 4: Một điểm trên trục thực thuộc về quỹ đạo nghiệm số nếu tổng số cực và zero
của G0 ( z ) bên phải nó là một số lẻ.
Qui tắc 5: Góc tạo bởi các đƣờng tiệm cận của quỹ đạo nghiệm số với trục thực xác định
bởi:
(2l 1)
(l 0,1,2,) (8.11)
nm
Qui tắc 6: Giao điểm giữa các tiệm cận với trục thực là điểm A có toạ độ xác định bởi:
174
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
n m
p z
OA
cuc zero i i
i 1 i 1
(8.12)
nm nm
( pi va zi là các cực và các zero của G0 ( z ) )
Qui tắc 7: Điểm tách nhập (nếu có) của quỹ đạo nghiệm số nằm trên trục thực và là
nghiệm của phƣơng trình:
dK
0 (8.13)
dz
Qui tắc 8: Giao điểm của quỹ đao nghiệm số với đƣờng tròn đơn vị có thể xác định bằng
1 trong 2 cách sau đây:
- Áp dụng tiêu chuẩn Routh – Hurwitz mở rộng hoặc tiêu chuẩn Jury.
- Thay z a jb (điều kiện a 2 b2 1 do giao điểm nằm trên đƣờng tròn đơn vị)
vào phƣơng trình đặc trƣng (8.7), cân bằng phần thực và phần ảo sẽ tìm đƣợc giao điểm
giữa QĐNS với đƣờng tròn đơn vị và giá trị K gh.
Qui tắc 9: Góc xuất phát của quỹ đạo nghiệm số tại cực phức pi đƣợc xác định bởi
m n
j 1800 arg( p j zi ) arg ( p j pi ) (8.14)
i 1 i 1
i j
Dạng hình học của công thức trên là:
j 180 0 góc từ các zero đến cực pi
(-Σgóc từ các cực còn lại đến cực pi ) (8.15)
Qui tắc 10: Tổng các nghiệm là hằng số khi K thay đổi từ 0 .
Qui tắc 11: Hệ số khuếch đại dọc theo quỹ nghiệm số có thể xác định từ điều kiện biên
độ:
N ( z)
K 1 (8.16)
D( z )
Sau đây chúng ta xét một thí dụ áp dụng các qui tắc vẽ QĐNS trên.
Thí dụ 8.3: Cho hệ thống điều khiển rời rạc có sơ đồ khối nhƣ hình vẽ.
Biết rằng:
K
- Hàm truyền khâu liên tục là G( s)
s( s 5)
- Chu kỳ lấy mẫu T 0.1sec
- Hãy vẽ QĐNS của hệ thống tren khi K thay đổi từ 0 đến . Tính K gh .
Lời giải:
Phƣơng trình đặc trƣng của hệ có sơ đồ khối nhƣ trên là: 1 G( z ) 0
175
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Trong đó:
G ( z ) GZOH ( s )G ( s )
1 e Ts K
Z
s s ( s 5)
K
1 z 1 Z 2
5
5 s s 5
K z 1 z 0.5 1 e 0.5 z 1 e 0.5 0.5e 0.5
5 z
5 z 1 z e 0.5
2
0.021z 0.018
G( z ) K
z 1z 0.607
Phƣơng trình đặc trƣng là:
0.0042 z 0.0036
1 K 0 (*)
( z 1)( z 0.607)
- Các cực p1 1, p2 0.607 (n 2)
- Các zero: z1 0.857 (m 1)
- Góc tạo bởi tiệm cận và trục thực:
(2l 1) (2l 1)
l 0
nm 2 1
- Giao điểm giữa tiệm cận với trục thực:
OA cuc zero 1 0.607 0.857 2.464
nm 2 1
dK
- Điểm tách nhập là nghiệm của phƣơng trình: 0
dz
Ta có:
* K z 1z 0.607 z 1.607 z 0.607
2
0.021z 0.018 0.021z 0.018
dK z 2 1.607 z 0.607
dz 0.021z 0.018
2 z 1.607 0.021z 0.018 z 2 0.607 z 0.607 0.021
0.021z 0.0182
0.021z 2 0.036 z 0.042
0.021z 0.0182
dK z 2.506
Do đó: 0 1
dz z2 0.792
Cả hai nghiệm đều thuộc QĐNS nên QĐNS có 2 điểm tách nhập.
- Giao điểm của QĐNS với đƣờng tròn đơn vị:
(*) z 1z 0.607 K 0.021z 0.018 0
z 2 0.021K 1.607z 0.018K 0.607 0 (**)
Cách 1: Dùng tiêu chuẩn Routh-Hurwitz mở rộng:
176
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
w 1
Đổi biến z , thay vào phƣơng trình (**) ta đƣợc:
w 1
2
w 1 w 1
0.021K 1.607 0.018K 0.607 0
w 1 w 1
0.039 Kw 2 0.786 0.036 K w 3.214 0.003K 0
Điều kiện để hệ thống ổn định là:
K 0 K 0
0.786 0.036 K 0 K 21.83 K gh 21.83
3.214 0.003K 0 K 1071
Thay K gh 21.83 vào phƣơng trình (**), ta đƣợc:
z 2 1.1485z 1 0 z 0.5742 j 0.8187
Vậy giao điểm của QĐNS với vòng tròn đơn vị là:
z 0.5742 j 0.8187
Cách 2: Thay vào z a jb phƣơng trình (**), ta đƣợc:
a jb 2 0.021K 1.607 a jb 0.018K 0.607 0
a 2 j 2ab b 2 0.021K 1.607 a j 0.021K 1.607 b 0.018K 0.607 0
a 2 b 2 0.021K 1.607 a 0.018K 0.607 0
j 2ab j 0.021K 1.607 b 0
Kết hợp với điều kiện a 2 b2 1 ta đƣợc hệ phƣơng trình:
a 2 b 2 0.021K 1.607 a 0.018K 0.607 0
j 2ab j 0.021K 1.607 b 0
a2 b2 0
Giải hệ phƣơng trình trên, ta đƣợc 4 giao điểm là:
z 1
tƣơng ứng với K = 1071 ƣơng ứng với
z 1
tƣơng ứng với K = 21.8381
z 0.5742 j 0.8187
Vậy Kgh = 21.83
Hình 8.3. QĐNS của hệ thống ở thí dụ 8.3
177
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
8.2 CHẤT LƢỢNG HỆ RỜI RẠC
8.2.1 Đáp ứng hệ rời rạc
Tuỳ theo mô tả toán học hệ rời rạc mà ta có thể xác định đƣợc đáp ứng của hệ rời
rạc bằng một trong hai cách sau đây:
Cách 1: Nếu hệ rời rạc mô tả bởi hàm truyền thì trƣớc tiên ta tính (C(z), sau đó dùng phép
biến đổi Z ngƣợc để tìm c(k).
Cách 2: Nếu hệ rời rạc mô tả bởi phƣơng trình trạng thái thì trƣớc tiên ta tính nghiệm x(k)
của phƣơng trình trạng thái, sau đó suy ra c(k).
Tƣơng tự nhƣ hệ liên tục ta cũng có khái niệm cực quyết định cho hệ rời rạc. Đối
với hệ lien tuc cặp cực quyết định là cặp cực nằm gần vòng tròn đơn vị nhất. Do quan hệ
z eTs , , nên đối với hệ rời rạc cặp cực quyết định là cặp cực nằm gần vòng tròn đơn vị
nhất. Hệ bậc cao có thể xấp xỉ gần đúng về hệ bậc hai với 2 cực là cặp cực quyết định.
8.2.2 Chất lƣợng quá độ
Có hai cách để đánh giá chất lƣợng quá độ của hệ rời rạc.
Cách 1: Đánh giá chất lƣợng quá độ dựa vào đáp ứng của hệ thống.
Trƣớc tiên ta phải tính đƣợc đáp ứng c(k) của hệ thống (xem mục 8.2.1) sau áp
dụng các công thức sau:
Tính độ vọt lố: dùng biểu thức định nghĩa:
cmax cxl
POT 100% (8.17)
cxl
trong đó: cmax là giá trị cực đại của c(k).
cxl là giá trị xác lập của c(k).
Tính thời gian quá độ: gọi kqd là thời điểm lấy mẫu mà từ đó trở đi đáp ứng c(k) của
hệ thống biến thiên không quá % so với giá trị xác lập cxl , nghĩa là:
.c
c(k ) cxl xl , k kqd (8.18)
100
1 cxl c(k ) 1 cxl , k kqd (8.19)
100 100
Thời gian quá độ đƣợc xác định bằng công thức:
tqd kqd .T (8.20)
trong đó T là chu kỳ lấy mẫu của hệ rời rạc.
Cách 2: Đánh giá chất lƣợng quá độ dựa vị trí cặp cực quyết định.
Cách này chỉ cho kết quả gần đúng và chỉ áp dụng đƣợc khi chu kỳ lấy mẫu T đủ
nhỏ. Khi biết cặp cực quyết định z* re j của hệ rời rạc là dựa vào quan hệ z eTs để suy
ra nghiệm s * , từ đó tính đƣợc hệ số tắt và tần số dao động tự nhiên n , bằng các công
thức:
ln r
(8.21)
ln r 2 2
1
n ln r 2 2 (8.22)
T
178
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Sau đó áp dụng các công thức đã trình bày trong chƣơng 5 để tính độ vọt lố, thời
gian quá độ,…
8.2.3 Sai số xác lập
Theo định lý giá trị cuối, ta có:
exl lim e(k ) lim e(1 z 1 ) E ( z ) (8.23)
k z 1
Công thức trên là công thức tổng quát, có thể áp dụng cho mọi hệ rời rạc. Sau đây
chúng ta khảo sát biểu thức sai số xác lập của hệ rời rạc lấy mẫu trong kênh sai số (hình
8.4), đây là hệ rời rạc thƣờng gặp nhất trong thực tế.
Hình 8.4. Hệ rời rạc lấy mẫu trong kênh sai số
Nếu không có khâu lấy mẫu, biểu thức sai số là:
R( s )
E ( s) (8.24)
1 G( s) H ( s)
Áp dụng các nguyên tắc đã trình bày ở mục 7.3.2.7, rời rạc hoá biểu thức (8.24) với
khâu lấy mẫu nằm trong kênh sai số, ta đƣợc:
R( z )
E( z) (8.25)
1 GH ( z )
Thay vào biểu thức (8.23), ta đƣợc
R( z )
exl lim (1 z 1 ) (8.26)
z 1 1 GH ( z )
Ta thấy sai số không chỉ phụ thuộc vào cấu trúc và thông số của hệ thống mà còn
phụ thuộc vào tín hiệu vào.
1
Nếu tín hiệu vào là hàm nấc đơn vị: R( z ) , thay vào biểu thức (8.26) ta đƣợc:
1 z 1
1 1
exl lim (8.27)
z 1 1 GH ( z ) 1 lim GH ( z )
z 1
Đặt: K p lim GH ( z ) (8.28)
z 1
K p gọi là hệ số vị trí. Thay K p vào biểu thức (8.27) ta đƣợc:
1
exl (8.29)
1 Kp
Tz 1
Nếu tín hiệu vào là hàm dốc đơn vị: R( z ) thay vào biểu thức (8.26) ta
(1 z 1 ) 2
đƣợc:
Tz 1 1 T
exl lim (8.30)
z 1 1 z 1 1 GH ( z ) lim (1 z 1 ) GH ( z )
z 1
179
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
1
Đặt: Kv lim (1 z 1 ) GH ( z ) (8.31)
T z 1
Kv gọi là hệ số vận tốc. Thay vào biểu thức (8.31) ta đƣợc:
1
exl (8.32)
Kv
Chúng ta vừa khảo sát các phƣơng pháp đánh giá chất lƣợng hệ rời rạc. Sau đây là
một số thí dụ áp dụng.
Thí dụ 8.4: Cho hệ thống điều khiển rời rạc có sơ đồ khối nhƣ hình vẽ,
Trong đó:
K
- Hàm truyền khâu liên tục: G( z ) ( K 10, a 2, b 3)
( s a)(s b)
- Chu kỳ lấy mẫu: T =0.1 sec
1. Tìm hàm truyền kín Gk (z )
2. Tính đáp ứng của hệ đối với tín hiệu vào là hàm nấc đơn vị.
3. Đánh giá chất lƣợng của hệ thống: độ vọt lố, thời gian quá độ, sai số xác lập.
Lời giải:
1. Hàm truyền của hệ rời rạc:
G( z )
Gk ( z )
1 G( z )
Trong đó:
G ( z ) GZOH ( s )G ( s )
1 e Ts K
Z
s ( s a)( s b)
1
K (1 z 1 ) Z
s ( s a)( s b)
z 1 z ( Az B)
K aT
bT
z ( z 1)( z e )( z e )
Với
b(1 e aT ) a(1 e bT )
A
ab(b a)
ae aT (1 e bT ) be bT (1 e aT )
B
ab(b a)
Thay K=10, a =2, b=3, T=0.1,ta đƣợc:
0.042 z 0.036
G( z )
( z 0.819)( z 0.741)
180
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
( z 0.819)( z 0.741)
Do đó: Gk ( z )
0.042 z 0.036
1
( z 0.819)( z 0.741)
0.042 z 0.036
Gk ( z ) 2
z 1.518 z 0.643
2. Đáp ứng của hệ:
C ( z ) Gk ( z ) R( z )
0.042 z 0.036 0.042 z 1 0.036 z 2
R ( z ) R( z )
z 2 1.518 z 0.643 1 1.518 z 1 0.643z 2
(1 1.518z 1 0.643z 2 )C ( z) (0.042 z 1 0.036 z 2 ) R( z)
c(k ) 1.518c(k 1) 0.643c(k 2) 0.042r (k 1) 0.036r (k 2)
c(k ) 1.518c(k 1) 0.643c(k 2) 0.042r (k 1) 0.036r (k 2)
Với điều kiện đầu: c(1) c(2) 0
r (1) r (2) 0
Thay vào công thức đệ qui trên, ta tính đƣợc:
c(k ) {0;0420;0.418;0.2662;0.3909;0.5003;0.5860;0.6459;0.6817;...
0.6975;0.6985;0.6898;0.6760;0.6606;0.6461;0.6341;0.6251;0.6191;0...}
Hình 8.5. Đáp ứng nấc đơn vị của hệ thống khảo sát ở thí dụ 8.4
3. Đánh giá chất lƣợng của hệ thống:
Giá trị xác lập của đáp ứng quá độ là:
cxl lim (1 z 1 )C ( z )
z 1
lim (1 z 1 )Gk ( z ) R( z )
z 1
0.042 z 0.036 1
lim (1 z 1 ) 2 1
z 1
z 1.518 z 0.643 1 z
0.042 z 0.036
lim 2
z 1 z 1.518 z 0.643
cxl 0.624
• Độ lọt lố:
181
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
cmax c xl 0.6985 0.624
POT 100% 100%
c xl 0.624
POT 11.94%
• Thời gian quá độ theo chuẩn 5%.
Theo kết quả tính đáp ứng của hệ thống ở trên ta thấy:
(1 0.05)cxl c(k ) (1 0.05)cxl
0.593 c(k ) 0.655, k 14
k qd 14
t qd k qd T 14 0.1
t qd 1.4 sec
• Sai số xác lập: do hệ hồi tiếp âm đơn vị nên ta có thể tính sai số xác lập bằng
công thức
exl rxl c xl 1 0.624
exl 0.376
Để so sánh ta có thể tính lại độ vọt lố và thời gian quá độ dựa vào vị trí cặp cực
phức. Cặp cực phức của hệ là nghiệm của phƣơng trình đặc trƣng:
z 2 1.518z 0.643 0
z 0.7590 j 0.2587 0.8019 0.3285
Do đó:
ln r ln 0.8019
0.5579
(ln r )
2 2
(ln 0.8019) 2 0.32852
1 1
n (ln r ) 2 2 (ln 0.8019) 2 0.32852 0.3958
T 0.1
Vì vậy:
0.5579 x3.14
POT exp 100% exp 100% 12.11%
2
1 2
1 0.5579
3 3
tqd 1.36 sec
n 0.5579 x0.3958
Kết quả trên cho thấy hai phƣơng pháp đánh giá chất lƣợng quá độ dựa vào đáp
ứng của hệ thống và dựa vào vị trí cặp cực phức quyết định cho kết quả hoàn toàn phù
hợp nhau.
Thí dụ 8.5: Cho hệ thống điều khiển rời rạc có sơ đồ khối nhƣ hình vẽ:
Trong đó:
K ( s a)
- Hàm truyền khâu liên tục: G( s)
( s b)(s c)
( K 2, a 5, b 2, c 3)
- Chu kỳ lấy mẫu: T=0.1 sec
182
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
1. Thành lập hệ phƣơng trình trạng thái mô tả hệ thống trên.
2. Tính đáp ứng của hệ đối với tín hiệu vào là hàm nấc đơn vị (điều kiện đầu bằng 0).
dựa vào phƣơng trình trạng thái vừa tìm đƣợc.
3. Tính độ vọt lố, thời gian quá độ, sai số xác lập.
Lời giải:
1. Thành lập hệ phƣơng trình trạng thái mô tả hệ thống theo trình tự 4 bƣớc đã trình
bày ở mục 7.4.3.
Bước 1: Hệ phƣơng trình trạng thái của khâu liên tục:
Có nhiều cách thành lập phƣơng trình trạng thái hệ liên tục, trong thí dụ này ta áp
dụng phƣơng pháp toạ độ pha. Ta có:
C ( s) 2( s 5) 2s 10
G( s) 2
ER ( s) ( s 2)(s 3) s 5s 6
Đặt biến phụ Y(s) sao cho:
C ( s) (2s 10)Y ( s) c(t ) 2 y (t ) 10 y(t ) (*)
E R ( s) ( s 5s 6)Y ( s) eR (t ) y(t ) 5 y (t ) 6 y(t )
2
(**)
Đặt: x1 (t ) y(t )
x2 (t ) x1 (t ) y (t ) x 2 (t ) y(t )
Thay vào biến trạng thái vào phƣơng trình (**), ta đƣợc:
eR (t ) x2 (t ) 5x2 (t ) 6 x1 (t )
x2 (t ) 6 x1 (t ) 5x2 (t ) eR (t )
Kết hợp phƣơng trình trên với cách đặt biến trạng thái, ta đƣợc hệ phƣơng trình
trạng thái viết dƣới dạng ma trận nhƣ sau:
x1 (t ) 0 1 x1 (t ) 0
x (t ) 6 5 x (t ) 1 eR (t )
2 2
A B
Thay các biến trạng thái vào phƣơng trình (*) ta đƣợc:
x (t )
c(t ) 10 x1 (t ) 2 x2 (t ) 10 2 1
x
D
Bước 2: Tính ma trận quá độ:
183
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
1 1
1 0 0 1 s 1
( s ) ( sI A) 1
s
0 1 6 5 6 s 5
s5 1
1 s 5 1 ( s 2)( s 3) ( s 2)( s 3)
s ( s 5) 6 6 s 6 s
( s 2)(2 3) ( s 2)( s 3)
s5 1
( s 2)( s 3) ( s 2)( s 3)
(t ) L1 ( s ) L1
6 s
( s 2)(2 3) ( s 2)( s 3)
1 3 2 1 1 1
L s 2 s 3 L s 2 s 3
L1 6 6 L1 2 3
s 2 s 3
s 2 s 3
(3e 2t 2e 3t ) (e 2t e 3t )
(t ) 2t 3t )
(6e 6e (2e et 3e 3t )
Bước 3: Rời rạc hoá các phƣơng trình trạng thái của hệ liên tục, ta đƣợc:
x[(k 1)T ] Ad x(kT ) Bd eR (kT )
c(kT ) Dx x(kT )
Trong đó:
(3e 2t 2e 3t ) (e 2t e 3t )
Ad (T ) 2t 3t )
(6e 6e (2e et 3e 3t ) t T 0.1
0.9746 0.0779
Ad
0.4675 0.5850
T T
3e 2 2e 3
Bd ( ) Bd
e 2
e 3 0
d
0 0
2
6e 6e 3
2e 2
3e 3
1
T
e e
2 3
d
0 2
2e 3e
3
0.1
e 2 e 3
2 3
2
e e 3
0
0.0042
Bd Dd D 10 2
0.0779
Bước 4: Hệ phƣơng trình biến trạng thái mô tả hệ thống rời rạc với tín hiệu vào r(kT)
là:
x(k 1)T Ad Bd Dd x(kT ) Bd r (kT )
c(kT ) Dd x(kT )
184
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Trong đó:
Ad Bd Dd
0.9746 0.0779 0.0042
10 2
0.4675 0.5850 0.0779
0.9326 0.0695
Ad Bd Dd
1.2465 0.4292
Vậy phƣơng trình trạng thái cần tìm là:
x1 (k 1) 0.9326 0.0695 x1 (k ) 0.0042
x (k 1) 1.2465 0.4292 x (k ) 0.0779 r (kT ) * * *
2 2
x (k )
c(k ) 10 2 1
x2 (k )
2. Đáp ứng của hệ thống:
Trƣớc tiên ta tìm nghiệm của phƣơng trình trạng thái:
x (k 1) 0.9326 x1 (k ) 0.0695 xx (k ) 0.0042r (k )
* * * 1
x2 (k 1) 1.2465 x1 (k ) 0.4292 x2 (k ) 0.0779r (t )
Với điều kiện đầu x1 (1) x2 (1) 0 , thay vào hai công thức đệ qui trên, ta đƣợc
nghiệm của phƣơng trình trạng thái là:
x1 (k ) 10 3 {0;4.2;13.5;24.2;34.2;42.6;49.1;54.0;57.4;59.7;
61.2;62.0;62.5;62.7;62.8;62.8;62.7;62.7;62.6;62.6;...}
x 2 (k ) 10 3 {0;77.9;106.1;106.6;93.5;75.4;57.2;41.2;28.3;18.5;
11.4;6.5;3.4;0.3;0.3;0.5;0.5;0.4...}
Đáp ứng của hệ thống:
x (k )
c(k ) 10 2 1 10 x1 (k ) 2 x2 (k )
x2 (k )
c(k ) {0; 0.198; 0.348; 0.455; 0.529; 0.577; 0.606; 0.622; 0.631; 0.634;
0.635; 0.634; 0.632; 0.629; 0.627; 0.627; 0.626; 0.625; 0.625...}
Hình 8.6. Đáp ứng nấc đơn vị của hệ thống khảo sát ở thí dụ 8.5
3. Đánh giá chất lƣợng của hệ thống
Theo kết quả tính đáp ứng ở trên ta thấy:
- Giá trị cực đại của đáp ứng là: cmax 0.635
185
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
- Giá trị xác lập của đáp ứng là: cxl 0.635
Độ vọt lố của hệ thống là:
cmax c xl 0.635 0.625
POT 100% 100%
c xl 0.625
POT 1.6%
Thời gian quá độ theo tiêu chuẩn 5%.
Theo kết quả tính đáp ứng của hệ thống ở trên ta thấy:
(1 0.05)c xl c(k ) (1 0.05)c xl
t qd k qd T 6 0.1
t qd 0.6 sec
Sai số xác lập là:
0.594 c(k ) 0.656, k 6
kqd 6
exl rxl c xl 1 0.625
exl 0.375
8.2.4 Ảnh hƣởng của chu kỳ lấy mẫu đến chất lƣợng hệ rời rạc
Chu kỳ lấy mẫu T ảnh hƣởng rất lớn đến tính ổn định và chất lƣợng của hệ rời rạc.
T càng lớn thì hệ thống càng dao động, độ vọt lố càng cao, thời gian quá độ càng lớn. Nếu
T lớn hơn một giá trị giới hạn nào đó thì hệ thống sẽ trở nên mất ổn định. Vì vậy chọn chu
kỳ lấy mẫu thích hợp có ý nghĩa rất lớn khi thiết kế hệ rời rạc. Định lý Shannon khẳng
định tần số lấy mẫu chỉ cần lớn hơn 2 lần tần số cắt của hệ thống thì có thể phục hồi đƣợc
dữ liệu mà không bị méo dạng, tuy nhiên tín hiệu chỉ không bị méo dạng nếu ta phục hồi
sin( x)
dữ liệu bằng khâu giữ có dạng hàm , độc giả tham khảo thêm các tài liệu về xử lý
x
tín hiệu số để biết thêm chi tiết về vấn đề này. Trong các hệ thống điều khiển thực tế do ta
thƣờng phục hồi dữ liệu bằng khâu giữ ZOH nên để việc lấy mẫu ảnh hƣởng khâu đáng
kể đến chất lƣợng của hệ thống ta cần chọn tần số lấy mẫu lớn hơn 10 lần tần số cắt của
hệ thống. Thí dụ dƣới đây minh hoạ ảnh hƣởng của chu kỳ lấy mẫu T.
Thí dụ 8.6: Cho hệ thống điều khiển có sơ đồ khối nhƣ hình vẽ:
Trong đó hàm truyền khâu liên tục là G( s)
K
K 10, a 1
( s a)
1. Xác định giá trị chu kỳ lấy mẫu giới hạn Tgh .
2. Khảo sát đáp ứng của hệ thống khi tín hiệu vào là hàm nấc đơn vị trong các trƣờng
hợp T 0.1Tgh ; T 0.5Tgh ; T 1.1Tgh .
Lời giải:
1. Xác định chu kỳ lấy mẫu giới hạn Tgh
Hàm truyền kín của hệ thống:
186
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
G( z )
Gk ( z ) (*)
1 Gh ( z )
Trong đó:
Gh ( z ) GZOH ( s)G ( s)
1 e Ts K 1 1
K (1 z )
s ( s a) s( s a)
z (1 e aT )
K (1 z 1 )
a( z 1)( z e aT )
K (1 e aT )
Gh ( z )
a( z e aT )
Thay vào (*) ta đƣợc:
K (1 e aT )
Gk ( z )
a( z e aT ) K (1 e aT )
Phƣơng trình đặc trƣng của hệ thống là:
a( z e aT ) K (1 e aT ) 0
Giải phƣơng trình trên, ta đƣợc cực của hệ là:
z e aT ) Ka (1 e aT )
Điều kiện để hệ thống ổn định là cực phải nằm trong vòng tròn đơn vị: z 1
K
1 e aT
(1 e aT ) 1
a
K K K
1 1 e aT 1
a a a
K a
e aT 1 (**)
K a
Nếu a K dễ dàng thấy rằng (**) luôn thoả mãn với mọi T nên hệ thống luôn ổn định.
Nếu a<K, giải (**) ta đƣợc:
1 K a
T ln
a K a
1 K a
Suy ra: Tgh ln
a K a
Thay số cụ thể K = 10, a = 1, ta đƣợc:
Tgh 0.2 sec
2. Khảo sát đáp ứng của hệ thống khi T=0.02; T=0.1; T=0.12; T=0.22,
Đáp ứng của hệ thống là:
187
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
K (1 e aT )
C ( z ) Gk ( z ) R( z ) R( z )
a( z e aT ) K (1 e aT )
( K / a)(1 e aT ) z 1 Az 1
1 ( K / a)(1 e aT ) e aT z 1
R ( z
)
1 Bz 1
R( z )
trong đó: A ( K / a)(1 e aT )
B ( K / a)(1 e aT ) e aT
Suy ra:
(1 Bz 1 )Cz Az 1 R( z )
c(k ) Bc(k 1) Ar (k 1) (***)
Thay giá trị cụ thể K, a, T ta tính đƣợc các hệ số A và B, sau đó sử dụng công thức
đệ qui (***) với điều kiện đầu bằng 0 và tín hiệu vào r(k) là hàm nấc đơn vị ta tính đƣợc
giá trị cụ thể của đáp ứng c(k).
Hình 8.7. Đáp ứng nấc đơn vị của hệ thống khảo sát ở thí dụ 8.6
Hình 8.7 minh hoạ đáp ứng của hệ thống. Ta thấy khi T rất nhỏ hơn Tgh thì đáp ứng
của hệ rời rạc gần giống đáp ứng của hệ liên tục, T càng tăng độ vọt lố càng lớn, T lớn
hơn Tgh thì hệ thống không ổn định.
8.3 THIÉT KẾ HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
8.3.1 Khái niệm
Có nhiều sơ đồ điều khiển khác nhau có thể áp dụng cho hệ rời rạc, trong đó sơ đồ
điều khiển thông dụng nhất là hiệu chỉnh nối tiếp (hình 8.8) với bộ điều khiển GC (z ) là bộ
điều khiển sớm–trễ pha số, PID số,…Một sơ đồ điều khiển khác cũng đƣợc sử dụng rất
phổ biến là điều khiển hồi tiếp trạng thái (hình 8.9).
Hình 8.8. Hiệu chỉnh nối tiếp dùng bộ điều khiển rời rạc
188
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Hình 8.9. Hệ thống điều khiển hồi tiếp trạng thái
Thiết kế bộ điều khiển rời rạc là xác định hàm truyền GC (z ) hoặc độ lợi hồi tiếp
trạng thái K để hệ thống thoả mãn yêu cầu về độ ổn định, chất lƣợng quá độ, sai số xác
lập. Thực tế trong đa số trƣờng hợp bộ điều khiển số các thuật toán phần mềm chạy trên
máy tính PC hoặc vi xử lý. Từ hàm truyền GC (z ) hoặc giá trị độ lợi K ta suy ra đƣợc
phƣơng trình sai phân mô tả quan hệ giữa ngõ vào và ngõ ra của bộ điều khiển. Quan hệ
này đƣợc sử dụng để lập trình phần mềm điều khiển chạy trên máy tính hoặc vi xử lý.
Có nhiều phƣơng pháp đƣợc sử dụng để thiết kế bộ điều khiển số, trong giáo trình
này chỉ đề cập phƣơng pháp thiết kế dùng quỹ đạo nghiệm số, phƣơng pháp thiết kế bộ
điều khiển PID, phƣơng pháp phân bố cực thiết kế bộ điều khiển hồi tiếp trạng thái và
phƣơng pháp giải tích.
8.3.2 Hàm truyền của các khâu hiệu chính
8.3.2.1 Khâu tỉ lệ:
GP ( z ) K P (8.33)
8.3.2.2 Khâu vi phân:
Hình 8.10. Khâu vi phân
de(t )
• Khâu vi phân liên tục: u (t ) K D
dt
• Khâu vi phân rời rạc: đƣợc tính bằng các công thức sai phân, có 3 cách tính:
- Sai phân tới:
e(k 1) e(k )
u (k ) K D
T
zE( z ) E ( z ) K D
U ( z) K D ( z 1) E ( z )
T T
U ( z) K D
GD ( z ) ( z 1) (8.34)
E( z) T
- Sai phân lùi:
e(k ) e(k 1)
u (k ) K D
T
E ( z ) z 1E ( z ) K D
U ( z) K D (1 z 1 ) E ( z )
T T
U ( z) K K z 1
GD ( z ) D (1 z 1 ) D (8.35)
E( z) T T z
- Sai phân giữa:
189
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
e(k 1) e(k 1)
u (k ) K D
2T
zE( z ) z 1E ( z ) K D
U ( z) K D ( z z 1 ) E ( z )
2T 2T
U ( z) K D K z 2 1
GD ( z ) ( z z 1 ) D (8.36)
E ( z ) 2T 2T z
Công thức sai phân tới và sai phân giữa cần tín hiệu e(k+1) là tín hiệu sai số trong
tƣơng lai, mà trong các bài toán điều khiển thời gian thực ta không thể có đƣợc tín hiệu
trong tƣơng lai (trừ khi sử dụng bộ dự báo) nên thực tế chỉ có công thức sai phân lùi đƣợc
sử dụng phổ biến nhất, do đó trong giáo trình này chúng ta mô tả khâu vi phân bằng hàm
truyền:
KD z 1
GD ( z ) (8.37)
T z
8.3.2.3 Khâu tích phân
Hình 8.11. Khâu tích phân
t
• Khâu tích phân liên tục: u (t ) K1 e(t )dt
0
kT ( k 1)T kT
• Khâu tích phân rời rạc: u (kT ) K I e(t )dt K I e(t )dt K I e(t )dt
0 0 ( k 1)T
kT
u (kT ) u(k 1)T K I e(t )dt (8.38)
( k 1)T
kT
Xét tích phân e(t )dt : có 3 cách tính
( k 1)T
Hình 8.12 Tích phân gần đúng
(a) Tích phân hình chữ nhật tới
(b) Tích phân hình chữ nhật lùi
(c) Tích phân hình thang
- Tích phân hình chữ nhật tới:
kT
e(t )dt Te(kT )
( k 1)T
(8.39)
Thay vào công thức (8.38), ta đƣợc:
190
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
u(kT ) u[(k 1)T ] K I Te(kT )
U ( z ) z 1U ( z ) K I TE( z )
(1 z 1 )U ( z ) K I TE( z )
U ( z) 1
GI ( z ) KIT (8.41)
E( z) 1 z 1
- Tích phân hình chữ nhật lùi:
kT
e(t )dt Te[(k 1)T ]
( k 1)T
(8.40)
Thay vào công thức (8.38), ta đƣợc:
u(kT ) u[(k 1)T ] K I Te[(k 1)T ]
U ( z ) z 1U ( z ) K I Tz 1 E ( z )
(1 z 1 )U ( z ) K I Tz 1 E ( z )
U ( z) z 1
GI ( z ) KIT (8.41)
E( z) 1 z 1
- Tích phân hình thang:
T e[(k 1)T ] e(kT )
kT
( k 1)T
e(t )dt
2
(8.42)
Thay vào công thức (8.38), ta đƣợc:
KIT
u (kT ) u[(k 1)T ] (e[(k 1)T ] e(kT ))
2
KT
U ( z ) z 1U ( z ) I z 1 E ( z ) E ( z )
2
KT
(1 z 1 )U ( z ) I z 1 1 E ( z )
2
GI ( z )
U ( z ) K I T z 1 1 K I T z 1
(8.43)
E( z) 2 1 z 1 2 z 1
Trong 3 cách tính tích phân trình bày ở trên, tích phân hình thang cho kết quả
chính xác nhất, do đó thực tế ngƣời ta thƣờng sử dụng công thức:
K IT z 1
GI ( z ) (8.44)
2 z 1
8.3.2.4 Bộ điều khiển PI, PD, PID rời rạc
Từ các hàm truyền rời rạc cơ bản vừa phân tích ở trên, ta rút ra đƣợc hàm truyền
của bộ điều khiển PI, PD, PID rời rạc nhƣ sau:
KIT z 1
GPI ( z ) K P (8.45)
2 z 1
K z 1
GPD ( z ) K P D (8.46)
T z
K IT z 1 K D z 1
GPID ( z ) K P (8.47)
2 z 1 T z
191
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
8.3.2.5 Bộ điều khiển bù pha (sớm pha, trễ pha)
Hình 8.13. Khâu hiệu chỉnh bù pha
Hàm truyền của bộ điều khiển bù pha liên tục có dạng:
sa
GC ( s) K (8.48)
sb
Nếu a>b thì là khâu trễ pha, a<b thì GC (s) là khâu sớm pha.
Rời rạc hoá quan hệ giữa ngõ vào và ngõ ra của bộ bù pha liên tục, sử dụng công
thức tích phân hình thang, ta suy ra đƣợc hàm truyền của bộ bù pha rời rạc có dạng:
(aT 2) z (aT 2)
GC ( z ) K (8.49)
(bT 2) z (bT 2)
Hàm truyền trên có thể viết lại dƣới dạng:
z zC
GC ( z ) KC (8.50)
z pC
trong đó zC là zero và pC là cực của khâu hiệu chỉnh.
(aT 2) 2(1 zC )
zC aT (8.51)
(aT 2) (1 zC )
(bT 2) 2(1 pC )
pC bT (8.52)
(bT 2) (1 pC )
Do aT, bT dƣơng từ quan hệ (8.51) và (8.52) suy ra cực và zero của khâu hiệu
chỉnh phải thoả mãn điều kiện:
zC 1
(8.53)
pC 1
Từ các quan hệ (8.51) và (8.52) ta cũng suy ra đƣợc zC pC nếu GC (z ) là khâu sớm
pha và zC pC nếu GC (z ) là khâu trễ pha.
8.3.3 Thiết kế hệ rời rạc dùng phƣơng pháp QĐNS
8.3.3.1 Thiết kế bộ điều khiển sớm pha
Phƣơng trình đặc trƣng của hệ thống trƣớc khi hiệu chỉnh là:
1 GH ( z) 0
Phƣơng trình đặc trƣng của hệ thống sau khi hiệu chỉnh là:
1 GC ( z )GH ( z ) 0
Khâu hiệu chỉnh sớm pha có dạng:
192
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
z zC
GC ( z ) KC
z pC
Bài toán đặt ra là chọn giá trị K C , z C , pC để đáp ứng của hệ thống thoả mãn yêu cầu
về chất lƣợng quá độ (chất lƣợng quá độ thể hiện qua vị trí của cặp cực quyết định).
Nguyên tắc thiết kế tƣơng tự nhƣ thiết kế hệ liên tục, nghĩa là sử dụng khâu hiệu chỉnh
GC (z ) để sửa dạng QĐNS của hệ thống sao cho QĐNS đi qua cặp cực mong muốn. Sau
đây là trình tự thiết kế:
TRÌNH TỰ THIẾT KẾ
Bƣớc 1: Xác định cặp cực quyết định từ yêu cầu thiết kế về chất lƣợng của hệ
thống trong quá trình quá độ:
Do vot lo POT *
s1*, 2 n j 1 2 z1*, 2 e Ts
Thoi gian qua do ... n
r z * e eTwn z * T n 1 2
Bƣớc 2: Xác định góc pha cần bù để cặp cực quyết định nằm trên QĐNS của hệ
thống sau khi hiệu chỉnh bằng công thức:
180 arg z pi arg z* zi
n m
* 0 *
i 1 i 1
Dạng hình học của công thức trên là:
* 1800 goc tu cac cuc cua GH ( z ) den cuc z *
goc tu cac zero cua GH ( z ) den cuc z *
Bƣớc 3: Xác định vị trí cực và zero của khâu hiệu chỉnh
Vẽ 2 nửa đƣờng thẳng bất kỳ xuất phát từ cực quyết định z * sao cho 2 nửa
đƣờng thẳng này tạo với nhau một góc bằng * . Giao điểm của hai nủa đƣờng
thẳng này với trục thực là vị trí cực và zero của khâu hiệu chỉnh.
Đối với hệ rời rạc, ngƣời ta thƣờng áp dụng phƣơng pháp triệt tiêu nghiệm
cực của hệ thống để chọn cực và zero của khâu hiệu chỉnh.
Bƣớc 4: Tính K bằng cách áp dụng công thức:
GC ( z )GH ( z ) z z * 1
Thí dụ 8.7 : Cho hệ thống điều khiển rời rạc có sơ đồ khối nhƣ hình vẽ:
trong đó:
10
- Hàm truyền khâu liên tục: G( s)
s( s 5)
- Chu kỳ lấy mẫu: T = 0.1 sec
193
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
- Hãy thiết kế khâu hiệu chỉnh sớm pha sao cho hệ thống sao khi hiệu chỉnh có cặp
cực quyết định với 0.707, n 10 (rad/sec)
Lời giải:
Phƣơng trình đặc trƣng của hệ trƣớc khi hiệu chỉnh:
1 G( z ) 0
trong đó:
G ( z ) GZOH ( s )G ( s )
1 e Ts K
s s ( s 5)
1
K (1 z 1 ) 2
s ( s 5)
K
z 1 z 0.5 1 e
0.5
z 1 e 0.5 0.5e 0.5
z
5z 1 z e 0.5
2
0.21 0.18
G( z)
( z 1)( z 0.607)
• Cặp cực quyết định mong muốn:
z1*, 2 re j
Trong đó:
r e T n e 0.10.70710 0.493
Tn 1 2 0. 10 1 0.707 2 0.707
z1*, 2 0.493e j 0.707 0.493cos(0.707) j sin(0.707)
z1*, 2 0.493e j 0.707 0.375 j 0.320
• Góc pha cần bù:
* 180 1 2 3
Dễ dàng tính đƣợc: 1 152.90
2 125.9 0
3 14.6 0
* 180 (152.9 125.9) 14.6 84 0
• Chọn cực và zero của khâu hiệu chỉnh bằng phƣơng pháp triệt tiêu nghiệm.
zC 0.607 zC 0.607
Tính cực của khâu hiệu chỉnh:
sin *
Ta có: AB PB
sin PAB
Mà: PB (0.607 0.375) 2 0.3202 0.388
^
PAB 2 * 125.90 840 41.90
sin 840
AB 0.388 0.578
sin 41.90
194
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
pC OA OB AB 0.607 0.578 0.029
pC 0.029
z 0.607
GC ( z ) K C
z 0.029
• Tính K C từ điều kiện:
GC ( z )G( z ) z z* 1
( z 0.607) (0.21z 0.18)
KC 1
( z 0.029) ( z 0.029)( z 1)( z 0.607) z 0.375 j 0.320
KC
0.210.375 j 0.320 0.18 1
(0.375 j 0.320 0.029)(0.375 j 0.320 1)
0.267
KC 1
0.471 0.702
0.267 0.471 0.702
KC 1.24
0.471 0.702 0.267
z 0.607
Vậy: GC ( z ) 1.24
z 0.029
Nhận xét:
195
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Quỹ đạo nghiệm số của hệ thống trƣớc khi hiệu chỉnh không qua điểm z*, do đó hệ
thống sẽ không bao giờ đặt đƣợc chất lƣợng đáp ứng quá độ nhƣ yêu cầu dù có thay đổi
hệ số khuếch đại của hệ thống.
Bằng cách sử dụng khâu hiệu chỉnh sớm pha, quỹ đạo nghiệm số của hệ thống bị sửa
dạng và qua điểm z * , do đó bằng cách chọn hệ số khuếch đại thích hợp (bƣớc 4) hệ thống
sẽ có cặp cực quyết định nhƣ mong muốn do đó đáp ứng quá độ đạt yêu cầu thiết kế.
a) QĐNS trước khi hiệu chỉnh b) QĐNS sau khi hiệu chỉnh
Hình 8.14 QĐNS của hệ thống ở thí dụ 8.7
8.3.3.2 Thiết kế bộ điều khiển trễ pha
Ta sử dụng khâu hiệu chỉnh trễ pha khi muốn làm giảm sai số xác lập của hệ thống
Xét hệ thống điều khiển có sơ đồ nhƣ hình vẽ.
Khâu hiệu chỉnh là khâu trễ pha:
z zC
G( z ) K C ( zC pC )
z pC
Bài toán đặt ra là chọn giá trị KC, zC và pC để làm giảm sai số xác lập của hệ thống
mà không ảnh hƣởng đáng kể đến chất lƣợng đáp ứng quá độ.
1 pC
Đặt:
1 zC
Tƣơng tự nhƣ đã làm đối với hệ liên tục, ta có trình tự thiết kế khâu hiệu chỉnh trễ
pha cho hệ rời rạc nhƣ sau:
196
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
TRÌNH TỰ THIẾT KẾ
Bƣớc 1: Xác định từ yêu cầu về sai số xác lập
KP
• Nếu yêu cầu về sai số xác lập cho dƣới dạng hệ số vị trí K P* thì
K P*
( K P : hệ số vị trí của hệ trƣớc khi hiệu chỉnh)
( K P* : hệ số vị trí mong muốn)
Nếu yêu cầu về sai số xác lập cho dƣới dạng hệ số vận tốc K v* thì:
Kv
K v*
( KV : hệ số vận tốc của hệ trƣớc khi hiệu chỉnh
KV* : hệ số vận tốc mong muốn)
Bƣớc 2: Chọn zero của khâu hiệu chỉnh rất gần điểm +1 để không làm ảnh
hƣởng đáng kể đến dạng QĐNS, suy ra:
zC 1 zC 1
(Chú ý điều kiện: zC 1` )
Bƣớc 3: Tính cực của khâu hiệu chỉnh:
pC 1 1 zC
Bƣớc 4: Tính KC bằng cách áp dụng công thức:
GC ( z )GH ( z ) z z * 1
Trong z1*, 2 là cặp cực quyết định của hệ thống sau khi hiệu chỉnh. Do yêu cầu thiết
kế không làm ảnh hƣởng đáng kể đến đáp ứng quá độ nên có thể tính gần đúng:
z1*, 2 z1, 2
với z1, 2 là cặp cực quyết định của hệ thống trƣớc khi hiệu chỉnh.
Thí dụ 8.8: Cho hệ thống điều khiển rời rạc có sơ đồ khối nhƣ hình vẽ.
10
Hàm truyền khâu liên tục: G( s) , chu kỳ lấu mẫu : T = 0.1 sec.
s( s 5)
Hãy thiết kế khâu hiệu chỉnh trễ pha sao cho hệ thống sao khi hiệu chỉnh có hệ số
vận tốc là KV* 100 .
Lời giải:
• Phƣơng trình đặc trƣng của hệ trƣớc khi hiệu chỉnh:
1 G( z ) 0
Trong đó:
197
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
G ( z ) GZOH ( s ) g ( s )
1 e eT K
s s ( s 5)
1
K (1 z 1 ) 2
s ( s 5)
K
z 1 z 0.5 1 e
0.5
z 1 e 0.5 0.5e 0.5
z
5( z 1) 2 z e 0.5
0.21z 0.18
G( z)
( z 1)( z 0.607)
Cặp cực quyết định của hệ thống trƣớc khi hiệu chỉnh là nghiệm của phƣơng trình:
0.21z 0.18
1 0 z1, 2 0.699 j 0.547
( z 1)( z 0.607)
Hệ số vận tốc của hệ thống trƣớc khi hiệu chỉnh là:
1
KV lim (1 z 1 )GH ( z )
T z 1
1 0.21z 0.18
KV lim (1 z 1 )
0.1 z 1 ( z 1)( z 0.607)
K V 9.9
Do đó:
KV 9.9
0.099
KV* 100
Chọn zero của khâu hiệu chỉnh rất gần điểm +1:
zC 0.99 zC 0.99
Suy ra cực của khâu hiệu chỉnh:
pC 1 (1 zC ) 1 0.099(1 0.99)
pC 0.999
z 0.99
GC ( z ) K C
z 0.999
Tính K C từ điều kiện:
( z 0.99) (0.21z 0.18)
KC 1
( z 0.999) ( z 1)( z 0.607) z 0.699 j 0.547
(0.699 j 0.547 0.99)
KC 1
(0.699 j 0.547 0.999)
0.6239
KC 1.007 1
0.6196
z 0.99
Vậy: GC ( z )
z 0.999
Nhận xét:
198
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
QĐNS của hệ thống trƣớc và sau khi hiệu chỉnh gần giống nhau nên đáp ứng quá độ
gần nhƣ không thay đổi.
a) QĐNS trước khi hiệu chỉnh b) QĐNS sau khi hiệu chỉnh
Hình 8.15 QĐNS của hệ thống ở thí dụ 8.8
8.3.3.3 Thiết kế bộ điều khiển sớm trễ pha
Hàm truyền khâu hiệu chỉnh sớm trễ pha cần thiết kế có dạng:
GC ( z ) GC1 ( z )GC 2 ( z )
Trong đó GC1 ( z ) là khâu hiệu chỉnh sớm pha.
GC 2 ( z ) là khâu hiệu chỉnh trễ pha.
Bài toán đặt ra thiết kế GC (z ) để cải thiện đáp ứng quá độ và sai số xác lập của hệ thống.
TRÌNH TỰ THIẾT KẾ
Bƣớc 1: Thiết kế khâu sớm pha để thoả mãn yêu cầu về đáp ứng quá độ (xem
phƣơng pháp thiết kế khâu hiệu chỉnh sớm pha ở mục 8.3.3.1)
Bƣớc 2: Đặt G1 ( z) GC1 ( z)G( z)
Thiết kế khâu hiệu chỉnh trễ pha GC 2 ( z ) mắc nối tiếp vào GC1 ( z ) để thoả mãn
yêu cầu về sai số xác lập mà không thay đổi đáng kể đáp ứng quá độ của hệ thống
sau khi đã hiệu chỉnh sớm pha (xem phƣơng pháp thiết kế khâu hiệu chỉnh trễ pha
ở mục 8.3.3.2)
8.3.4. THIẾT KẾ BỘ ĐIỀU KHIỂN HỒI TIẾP TRẠNG THÁI
Cho đối tƣợng điều khiển đƣợc mô tả bởi phƣơng trình trạng thái:
199
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
x(k 1) Ad x(k ) Bd u (k )
c(k ) Dd x(k )
Tín hiệu điều khiển trong hệ hồi tiếp trạng thái là:
u(k ) r (k ) Kx(k )
Hệ phƣơng trình biến trạng thái mô tả hệ hồi tiếp trạng thái:
x(k 1) Ad x(k ) Bd [r (k ) Kx(k )]
c(k ) Dd x(k )
x(k 1) [ Ad Bd K ]x(k ) Bd r (k )
c(k ) Dd x(k )
Phƣơng trình đặc trƣng của hệ hồi tiếp trạng thái:
det[zI Ad Bd K ] 0 (*)
Ngƣời ta CM đƣợc rằng: Nếu rank (P)= n, với n là bậc của hệ thống và
P Bd Ad Bd Ad2 Bd Adn 1Bd thì HT trên điều khiển đƣợc, khi đó có thể tìm đƣợc
vector K để phƣơng trình đặc trƣng (*) có nghiệm bất kỳ.
TRÌNH TỰ THIẾT KẾ
Bƣớc 1: Viết phƣơng trình đặc trƣng của hệ thống sau khi hiệu chỉnh:
det[zI Ad Bd K ] 0 (1)
Bƣớc 2: Viết phƣơng trình đặc trƣng mong muốn:
n
(z p ) 0
i 1
i (2)
Trong đó pi i 1..n là các cực mong muốn
Bƣớc 3: Cân bằng các hệ số của hai phƣơng trình đặc trƣng (1) và (2) tìm đƣợc
vector độ lợi hồi tiếp K.
Thí dụ 8.9 : Cho hệ thống rời rạc nhƣ hình vẽ:
Hệ phƣơng trình biến trạng thái mô tả đối tƣợng là:
x(k 1) Ad x(k ) Bd u (k )
c(k ) Dd x(k )
Trong đó:
1 0.316 0.092
Ad Bd Dd 10 0
0 0.368 0.316
Hãy tính vector độ lợi hồi tiếp trạng thái sao cho hệ kín có cặp cực phức với
0.707 và n 10 rad/sec
Lời giải:
Phƣơng trình đặc trƣng của hệ thống kín là:
200
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
det[zI Ad Bd K ] 0
1 0 1 0.316 0.092
det z k1 k 2 0
0 1 0 0.368 0.316
z 1 0.092k1 0.316 0.092k 2
det 0
0.316k1 z 0.368 0.316k 2
z 1 0.092k1 z 0.368 0.316k 2 0.316k1 0.316 0.092k 2 0
z 2 0.092k1 0.316k 2 1.368z 0.066k1 0.316k2 0 (1)
Cặp cực quyết định mong muốn:
z1*, 2 re j
Trong đó:
r e T n e 0.10.70710 0.493
T 1 2 0.110 1 0.707 2 0.707
z1*, 2 0.493e j 0.707 0.493cos0.707 j sin 0.707
z1*, 2 0.493e j 0.707 0.375 j 0.320
Phƣơng trình đặc trƣng mong muốn:
( z 0.375 j 0.320)z 0.375 j 0.320 0
z 2 0.75z 0.243 0 (2)
Cân bằng các hệ số ở hai phƣơng trình (1) và (2), ta đƣợc:
0.092k1 0.316k2 1.368 0.75
0.066k1 0.316k2 0.368 0.243
Giải hệ phƣơng trình trên, ta đƣợc:
k1 3.12
k2 1.047
Vậy K 3.12 1.047
Thí dụ 8.10: Cho hệ thống điều khiển rời rạc có sơ đồ nhƣ hình vẽ:
Hãy xác định vector hồi tiếp trạng thái K k1 k2 sao co hệ thống có cặp nghiệm
phức với 0.5 ; n 8 (rad/sec).
Lời giải:
- Hệ phƣơng trình trạng thái mô tả khâu liên tục:
201
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Theo hình vẽ ta có:
X 2 ( s)
• X 1 ( s) sX1 ( s) X 2 ( s) x1 (t ) x2 (t ) (1)
s
U ( s)
• X 2 ( s) R ( s 1) X 2 ( s) U R (s)
s 1
x2 (t ) x2 (t ) uR (t )
x2 (t ) x2 (t ) u R (t ) (2)
Kết hợp (1) và (2) ta đƣợc hệ phƣơng trình:
x1 (t ) 0 1 x1 (t ) 0
x (t ) 0 1 x (t ) 1uR (t )
2 2
Đáp ứng của hệ thống:
x (t )
c(t ) 10 x1 (t ) 10 0 1 Dx(t )
x2 (t )
Do đó:
0 1 0
A B C 10 0
0 1 1
- Ma trận quá độ:
1 1
1 0 0 1 s 1
• ( s) ( sI A) s
1
0 s 1
0 1 0 1
1 1
1 s 1 1 s s( s 1)
s( s 1) 0 s 1
0
s 1
1 1 1 1 1 1
L L
• (t ) L1 ( s) L1 s s( s 1) s s( s 1)
0 1 1
0 L1
s a s 1
1 1 e t
(t )
0 e t
- Rời rạc hoá các phƣơng trình trạng thái của hệ liên tục, ta đƣợc:
x(k 1) Ad x(k ) Bd u (k )
c(k ) Dd x(k )
Trong đó:
1
• Ad (T )
1 e 1
0.1
0.095
0 0.905
0 e 0.1
202
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
T
• Bd Bd
1
0.1
1 e 0d
0.1
1 e
d
0 e
1
0 e
0 0
e
0.1
0.1 e 0.1 1 0.005
0.1
e 0 e 1 0.095
• Dd D 10 0
- Phƣơng trình đặc trƣng của hệ thống kín:
det[zI Ad Bd K ] 0
1 0 1 0.095 0.005
det z k1 k 2 0
0 1 0 0.905 0.095
z 1 0.005k1 0.095 0.005k 2
det 0
0.095 k1 z 0.905 0.095 k 2
z 1 0.005k1 z 0.905 0.095k 2 0.905k1 0.095 0.005k 2 0
z 2 0.005k1 0.095k 2 1.905z 0.0045k1 0.095k 2 0.905 0 (1)
Cặp cực quyết định mong muốn:
z1*, 2 re j
Trong đó:
r e T n e 0.10.58 0.493
Tn 1 2 0.1 8 1 0.52 0.693
z1*, 2 0.67e j 0.693 0.67cos0.693 j sin 0.693
z1*, 2 0.516 j 0.428
Phƣơng trình đặc trƣng mong muốn:
( z 0.516 j 0.428)( z 0.516 j 0.428) 0
z 2 1.03z 0.448 0 (2)
Cân bằng các hệ số ở hai phƣơng trình (1) và (2), ta đƣợc:
0.005k1 0.095k2 1.905 1.03
0.0045k1 0.095k2 0.905 0.448
Giải hệ phƣơng trình trên, ta đƣợc:
k1 44.0
k2 6.895
Vậy K 4.805 8.958
8.3.4 Thiết kế bộ điều khiển PID
8.3.4.1 Phương pháp Zeigler-Nichol
Hàm truyền bộ điều khiển PID:
KIT z 1 KD z 1
GPID ( z ) K P
2 z 1 T z
203
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Nếu chu kỳ lấy mẫu T đủ nhỏ để không làm ảnh hƣởng đến chất lƣợng của hệ thống
(xem mục 8.2.4) thì K P , K I , K D các hệ số có thể chọn bằng phƣơng pháp thực nghiệm
Zeigler-Nichol nhƣ đã trình bày ở chƣơng 6.
8.3.4.2 Phương pháp giải tích
Từ yêu cầu thiết kế về đáp ứng quá độ (vị trí nghiệm của phƣơng trình đặc trƣng) và
sai số xác lập, có thể tính toán giải tích để chọn thông số bộ điều khiển PID số. Sau đây
là một số thí dụ.
Thí dụ 1: Cho hệ thống điều khiển có sơ đồ nhƣ hình vẽ:
10
G( s)
; H ( s) 0.05; T 2 sec
10s 1
Thiết kế khâu hiệu chỉnh GC (z ) để hệ thống có cặp cực phức với 0.707 ;
n 2 rad/sec và sai số xác lập đối với tín hiệu vào là hàm nấc đơn vị bằng 0.
Lời giải:
Do yêu cầu sai số xác lập đối với tín hiệu vào là hàm nấc bằng 0 nên ta sử dụng khâu
hiệu chỉnh GC (z ) là khâu PI.
K IT z 1
GC ( z ) K P
2 z 1
Phƣơng trình đặc trƣng của hệ thống sau khi hiệu chỉnh là:
1 GC ( z )GH ( z ) 0
Trong đó:
• GH ( z) GZOH (s)G(s) H (s)
1 e Ts 10 0.05
s 10s 1
0.05
1 z 1
s ( s 0.1)
0.05 z (1 e 0.2 )
1 z 1
0.1( z 1)( z e 0.2 )
0.091
GH ( z )
( z 0.819)
Do đó phƣơng trình đặc trƣng của hệ thống là:
K T z 1 0.091
1 KP I 0
2 z 1 z 0.819
K T z 1 0.091
1 KP I 0
2 z 1 z 0.819
204
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 8: Phân tích và thiết kế hệ rời rạc
Thay T=2, ta suy ra:
z 2 0.091K P 0.091K1 1.819z 0.091K P 0.091K1 0.819 0 (1)
Cặp cực quyết định mong muốn là:
z1*, 2 re j
Với:
r e T n e 20.7072 0.059
Tn 1 2 2 2 1 0.707 2 2.828
z1*, 2 0.059e j 2.828 0.059cos2.828 j sin 2.828
z1*, 2 0.056 j 0.018
Phƣơng trình đặc trƣng mong muốn là:
( z 0.056 j 0.018)( z 0.056 j 0.018) 0
z 2 0.112 z 0.0035 0 (2)
So sánh (1) và (2), suy ra:
0.091K P 0.091K I 1.819 0.112
0.091K P 0.091K I 0.819 0.0035
Giải hệ phƣơng trình trên, ta đƣợc:
K P 15.09
K I 6.13
z 1
Vậy: GC ( z ) 15.09 6.13
z 1
205
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Chương 9
HỆ THỐNG ĐIỀU KHIỂN PHI TUYẾN
9.1. KHÁI NIỆM VỀ HỆ THỐNG PHI TUYẾN
9.1.1. Khái niệm về hệ phi tuyến
Hệ phi tuyến là hệ thống trong đó quan hệ vào – ra không thể mô tả bằng phƣơng
trình vi phân/sai phân tuyến tính
Phần lớn các đối tƣợng điều khiển trong tự nhiên mang tính phi tuyến. Các hệ
thống
Hệ thống thủy khí (TD: bồn chứa chất lỏng…)
Hệ thống nhiệt động học (TD: lò nhiệt …)
Hệ thống cơ khí (TD: cánh tay máy …)
Hệ thống điện – tử (TD: động cơ, mạch khuếch đại …)
Hệ thống vật lý có cấu trúc hỗn hợp …
Đều có tính phi tuyến.
9.1.2. Tính chất của hệ phi tuyến
Hệ phi tuyến không thỏa mãn nguyên lý xếp chồng.
Tính ổn định của hệ phi tuyến không chỉ phụ thuộc vào cấu trúc, thông số của hệ
thống mà còn phụ thuộc vào tín hiệu vào.
Nếu tín hiệu vào hệ phi tuyến là tín hiệu hình sin thì tín hiệu ra ngoài thành phần
tần số cơ bản (bằng tần số tín hiệu vào) còn có các thành phần hài bậc cao (là bội
số của tần số tín hiệu vào).
Hệ phi tuyến có thể xảy ra hiện tƣợng dao động tự kích.
9.1.3. Mô tả toán học hệ phi tuyến dùng phƣơng trình vi phân
Tùy theo dạng tín hiệu bên trong hệ thống mà hệ phi tuyến có thể chia làm 2 loại:
Hệ phi tuyến liên tục
Hệ phi tuyến rời rạc
Nội dung môn học chỉ đề cấp đến hệ phi tuyến liên tục.
Tổng quát, quan hệ vào – ra của hệ phi tuyến liên tục có thể biểu diễn dƣới dạng
phƣơng trình vi phân phi tuyến bậc n:
d n y(t ) d n1 y(t ) dy (t ) d m1u (t ) du (t )
n
g
n 1
, , , y (t ), m 1
, , , u (t )
dt dt dt dt dt
Trong đó: u(t) là tín hiệu vào
y(t) là tín hiệu ra
g(.) là hàm phi tuyến
206
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
9.1.3. Mô tả toán học hệ phi tuyến dùng phƣơng trình trạng thái
Hệ phi tuyến liên tục có thể mô tả bằng phƣơng trình trạng thái
x (t ) f ( x(t ), u (t ))
y (t ) h( x(t ), u (t ))
trong đó:
u(t) là tín hiệu vào
y(t) là tín hiệu ra
x(t) là vector trạng thái, x(t ) x1 (t ), x2 (t ),, xn (t )T
f(.), h(.) là các hàm phi tuyến
9.1.4. Các khâu vi tuyến cơ bản
Khâu relay 2 vị trí Khâu replay 3 vị trí
Ym sgn( n) ( u D)
y Ym sgn(u) y
0 ( u D)
Khâu khuếch đại bão hòa Khâu khuếch đại có miền chết
207
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Ym sgn( n) ( u D)
y
K (u D sgn( u ) ( u D)
Ku ( u D) y
0 ( u D)
( K Ym / D)
Khâu relay 2 vị trí trễ Khâu relay 3 vị trí trễ
Ym sgn( n) neu u D
y
Ym sgn( n) neu u D
Khâu khuếch đại bão hòa có trễ
Một số ví dụ đối tƣợng phi tuyến
- Hệ bốn chứa chất lỏng
1
h(t ) ku(t ) a 2 gh(t )
A
208
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
h(t) độ cao mực chất lỏng trong bồn chứa
u(t) điện áp điều khiển máy bơm
A: tiết diện ngang bồn chứa
a: tiết diện van xả
k: hệ số tỉ lệ với công suất máy bơm
- Hệ bốn chứa chất lỏng nối tiếp
h1 (t )
1
A
ku(t ) a12 2 g h1 (t ) h2 (t )
h (t )
2
1
A
a12 2 g h1 (t ) h2 (t ) a 2 2 gh2 (t )
- Hệ con lắc ngƣợc
Chú thích:
M: trọng lƣợng xe [Kg] m: trọng lƣợng con lắc [Kg]
L: chiều dài con lắc [m] u: lực tác động vào xe [N]
g: gia tốc trọng trƣờng [m/s2] x: vị trí xe [m]
209
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
θ: góc giữa con lắc và phƣơng thẳng đứng [rad]
F mlsin 2 mg cos sin
x
M m mcos
2
F cos ( M m) g (sin ) ml(cos sin ) 2
ml(cos ) 2 ( M m)l
9.2. CÁC PHƢƠNG PHÁP NGHIÊN CỨU HỆ PHI TUYẾN
Không có phƣơng pháp nào có thể áp dụng hiệu quả cho mọi hệ phi tuyến.
Môn học đề cập đến một số phƣơng pháp thƣờng dùng sau đây:
Phƣơng pháp tuyến tính hóa
Phƣơng pháp hàm mô tả
Phƣơng pháp Lyapunov
Phƣơng pháp tuyến tính hóa
Xét hệ phi tuyến mô tả bởi phƣơng trình trạng thái:
x (t ) f ( x(t ), u (t ))
y (t ) h( x(t ), u (t ))
Khai triển Taylor xung quanh điểm làm việc tĩnh ( x, u ) a có thể mô tả hệ thống bằng
phƣơng trình trạng thái tuyến tính:
~x (t ) A~
x (t ) Bu~(t )
~ ~ ~ (*)
y (t ) Cx (t ) Du (t )
Trong đó
~
x (t ) x(t ) x
~
u (t ) u (t ) u
~
y (t ) y (t ) y y h( x , u )
Các ma trận trạng thái của hệ tuyến tính gần đúng đƣợc tính nhƣ sau:
210
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
f1 f 2 f n f1
x
x 2 x n u
1 f
f 2 f 2 f n
B u
2
A x x 2 x n
1
f f n f n f n
n u x ,u
x n x 2 x n x ,u
h h h h
C D
x1 x 2 x n x ,u u x ,u
Có thể áp dụng các phƣơng pháp khảo sát hệ tuyến tính để phân tích, thiết kế hệ
thống phi tuyến xung quanh điểm tĩnh dùng mô hình tuyến tính (*).
9.3. PHƢƠNG PHÁP TUYẾN TÍNH HOÁ ĐIỀU HOÀ
Phƣơng pháp hàm mô tả (Phƣơng pháp tuyến tính hóa điều hòa)
Khái niệm
Phƣơng pháp hàm mô tả mở rộng gần đúng hàm truyền đạt của hệ tuyến tính sang hệ
phi tuyến.
Phƣơng pháp hàm mô tả là phƣơng pháp khảo sát trong miền tần số có thể áp dụng
cho các hệ phi tuyến bậc cao (n>2) do dễ thực hiện và tƣơng đối giống tiêu chuẩn
Nyquist.
Chỉ áp dụng đƣợc để khảo sát chế độ dao động trong hệ phi tuyến gồm có khâu phi
tuyến nối tiếp với khâu tuyến tính theo sơ đồ khối nhƣ sau:
Phƣơng trình cân bằng điều hòa
e(t ) M sint u(t ) u1 (t ) u 2 (t )
211
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Để khảo sát khả năng tồn tại dao động tuần hoàn không tắt trong hệ, ở đầu vào khâu
phi tuyến ta cho tác động sóng điều hòa.
e(t ) M sint
Tín hiệu ra khâu phi tuyến không phải là tín hiệu hình sin. Phân tích Fourier ta thấy
u(t) chứa thành phần tần số cơ bản ω và các thành phần hài bậc cao 2ω, 3ω.
A0
u (t ) Ak sin kt Bk coskt
2 k 1
Các hệ số Fourier xác định theo các công thức sau:
1
A0
u (t )d (t )
1
Ak
u (t ) sin kt d (t )
1
Bk
u (t ) cosnt d (t )
Giả thiết G(s) là bộ lọc thông thấp, các thành phần hài bậc cao ở ngõ ra của khâu
tuyến tính không đáng kể so với thành phần tần số cơ bản, khi đó tín hiệu ra của khâu
tuyến tính gần đúng bằng:
y(t ) Y1 sint 1
Điều kiện để trong hệ có dao động ổn định với tần số là:
M sint e(t ) y(t ) Y1 sint 1
Y M Phƣơng trình cân bằng biên độ
Suy ra: 1
1 Phƣơng trình cân bằng pha
Hàm mô tả
Xét khâu phi tuyến:
Do khi tín hiệu vào của khâu phi tuyến là tín hiệu hình sin:
e(t ) M sint
212
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Tín hiệu ra u(t) xấp xỉ thành phần tần số cơ bản (do ta bỏ qua các thành phần hài bậc
cao)
u(t ) u1 (t ) A1 sint B1 cost
Nên ta có thể coi khâu phi tuyến nhƣ là một khâu khuếch đại có hệ số khuếch đại là:
A1 jB1
N (M )
M
Tổng quát N(M) là một hàm phức nên ta gọi là hệ số khuếch đại phức của khâu phi
tuyến. Vì quan hệ vào ra của khâu phi tuyến có thể mô tả gần đúng bằng hệ số khuếch đại
phức N(M) nên N(M) còn đƣợc gọi là hàm mô tả của khâu phi tuyến.
Định nghĩa: Hàm mô tả (hay còn gọi là hệ số khuếch đại phức) là tỉ số giữa thành
phần sóng hài cơ bản của tín hiệu ra của khâu phi tuyến và tín hiệu vào hình sin
A1 jB1
N (M )
M
1 1
A1
u(t ) sinkt d (t )
B1
u(t ) cosnt d (t )
Trong các công thức trên u(t) là tín hiệu ra của khâu phi tuyến khi tín hiệu vào là
M sin(t ) . Nếu u(t) là hàm lẻ thì:
2
A1
u(t ) sinkt d (t )
B1 0
Hàm mô tả của các khâu phi tuyến cơ bản
- Khâu relay 2 vị trí
213
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Do u(t) là hàm lẻ nên:
2 2 2Vm 4Vm
A1
u(t ) sint d (t ) V
0
m sin (t )d (t )
cost
t 0
B1 0
Do đó hàm mô tả của khâu relay 2 vị trí là:
A1 jB1 4Vm
N (M )
M M
- Khâu relay 3 vị trí
Do u(t) là hàm lẻ nên B1 0
214
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
2 2 2Vm 4Vm
A1
u(t ) sint d (t )
Vm sin (t )d (t )
cost
t
cos
B1 0
D D2
Theo đồ thị ta có: D M sin sin cos 1 2
M M
4Vm D2
A1 1
M2
Do đó hàm mô tả của khâu relay 3 vị trí là:
A1 jB1 4Vm D2
N (M ) 1 2
M M M
- Khâu khuếch đại bão hòa
Do u(t) là hàm lẻ nên B1 0
/2
2 4 2Vm 4Vm
u (t ) sin t d (t ) u (t ) sin t d (t ) cost
A1 cos
0
0
t
/2
4 Vm M
sin t d (t ) Vm sin t d (t )
2
0 D
215
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
sin 2t
/ 2
4 Vm M /2
t Vm cos t d (t ) t
2 D 2 t 0
sin 2
/ 2
4 Vm M M V m
Vm cos 2 sin 2
2 D 2 t 0 D
Do đó hàm mô tả của khâu khuếch đại bão hòa là:
A1 jB1 Vm D
N (M ) 2 sin2 sin
M M M
- Khâu khuếch đại có vùng chết
Do u(t) là hàm lẻ nên B1 0
/2
2 4
A1
u(t ) sin t d (t )
0
K M sin t Dsin t d (t )
0
sin 2t D 2 sin 2t
/2
4 KM
t cost KM 1
2 M
Do đó hàm mô tả của khâu khuếch đại có vùng chết là:
A1 jB1 2 sin 2t D
N (M ) K 1 sin
M M
- Khâu relay 2 vị trí có trễ:
216
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Ta có:
2
2 2 4Vm
A1
u(t ) sint d (t )
Vm sin t d (t )
cos
2
2 2 4Vm
B1
u(t ) cost d (t )
V
m cos t d (t )
sin
Do đó hàm mô tả của khâu relay 2 vị trí có trể là:
A1 jB1 4Vm D
N (M ) cos j sin sin
M M
Khảo sát chế độ dao động điều hòa trong hệ phi tuyến
Xét hệ phi tuyến có sơ đồ nhƣ sau:
Phƣơng trình đặc trƣng của hệ thống là:
1
1 N ( M )G( j ) 0 G( j ) (*)
N (M )
Phƣơng trình trên đƣợc gọi là phƣơng trình cân bằng điều hòa. Phƣơng trình này sẽ
đƣợc dùng để xác định biên độ và tần số của dao động điều hòa trong hệ phi tuyến.
217
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Nếu (M * , * ) là nghiệm của phƣơng trình (*) thì trong hệ phi tuyến có dao động với
tần số * , biên độ M * .
Về mặt hình học, nghiệm (M * , * ) là nghiệm của phƣơng trình (*) chính là giao điểm
của đƣờng cong Nyquist G( j ) của khâu tuyến tính và đƣờng đặc tính -1/N(M)của khâu
phi tuyến.
Dao động trong hệ phi tuyến là ổn định nếu đi theo chiều tăng của đặc tính
1 / N (M ) của khâu phi tuyến chuyển từ vùng không ổn định sang vùng ổn định của khâu
tuyến tính G( j ) .
Trình tự khảo sát chế độ dao động trong hệ phi tuyến
Bước 1: Xác định hàm mô tả của khâu phi tuyến (nếu khâu phi tuyến không phải là các
khâu cơ bản).
Bước 2: Điều kiện tồn tại dao động trong hệ: đƣờng cong Nyquist G( j ) và đƣờng đặc
tính 1 / N (M ) phải cắt nhau.
Bước 3: Biên độ, tần số dao động (nếu có) là nghiệm của phƣơng trình:
1
G( j ) (*)
N (M )
Nếu N(M) là hàm thực thì:
- Tần số dao động chính là tần số cắt pha của khâu tuyến tính G( j ) .
G( j )
- Biên độ dao động là nghiệm của phƣơng trình:
1
G( j )
N (M )
Thí dụ 1:
Xét hệ phi tuyến có sơ đồ nhƣ sau:
218
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Hàm truyền của khâu tuyến tính là:
10
G( s)
s(0.2s 1)(2s 1)
Khâu phi tuyến là khâu relay 2 vị trí có Vm 6 .
Hãy xác định biên độ vào tần số dao động tự kích
trong hệ (nếu có).
Giải:
Hàm mô tả của khâu relay 2 vị trí là:
4Vm
N (M )
M
Do đƣờng cong Nyquist G( j ) và đƣờng đặc tính 1 / N (M ) luôn luôn cắt nhau (xem
hình vẽ) nên trong hệ phi tuyến luôn luôn có dao động.
Tần số dao động là tần số cắt pha của G( j ) :
10
G ( j ) arg
j ( 0.2 j 1)( 2 j 1)
arctan(0.2 ) arctan 2 arctan(0.2 ) arctan 2
2 2
0.2 2
1 0.2
. 2 0 1.58rad / sec
1 0.2
. 2
Biên độ dao động là nghiệm của phƣơng trình:
1 10
G j 1.82
N (M )
1 2 1.58
2
1.58 1 (0.2 1.58) 2
M
1.82 M 13.90
4Vm
Kết luận: Trong hệ phi tuyến có dao động y(t ) 13.90 sin(1.58t )
Thí dụ 2:
Xét hệ phi tuyến có sơ đồ nhƣ sau:
219
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Hàm truyền của khâu tuyến tính là:
10
G( s)
s(0.2s 1)(2s 1)
Khâu phi tuyến là khâu relay 3 vị trí.
1. Hãy tìm điều kiện để trong hệ phi
tuyến có dao động.
2. Hãy xác định biên độ và tần số dao
động khi Vm 6, D 0.1 .
Giải:
A1 jB1 4Vm D2
Hàm mô tả của khâu relay 3 vị trí là N ( M ) 1 2
M M M
Điều kiện để trong hệ thống có dao
động là đƣờng cong Nyquist G( j ) và
đƣờng đặc tính 1-N(M) phải cắt nhau.
Điều này xảy ra khi:
1
G j
N (M )
Giải:
Tần số cắt pha G( j ) của (xem cách tính ở thí dụ 1).
1.58(rad / sec)
Để dao động xảy ra ta phải có điều kiện:
1 10
G j 1.82
N (M ) 1.58 1 (0.2 1.58) 2 1 (2 1.58) 2
N (M ) 0.55 (*)
Theo bất đẳng thức Cauchy:
220
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
4Vm D2 2V D 2 D 2 2Vm
N (M ) 1 2 m 1 2
M M 2D M M D
Do đó điều kiện (*) đuợc thỏa mãn khi:
2Vm V
0.55 m 0.864
D D
Vm
Vậy điều kiện để trong hệ có dao động tự kích là: 0.864
D
Biên độ dao động là nghiệm của phƣơng trình:
1 4Vm D2
1.82 N ( M ) 0.55 1 2 0.55
N (M ) M M
Khi Vm 6, D 0.1 , giải phƣơng trình trên ta đƣợc M= 13.90
Vậy dao động trong hệ là: y(t ) 13.90 sin(1.58t )
9.4. PHƢƠNG PHÁP LYAPUNOV
9.4.1. Giới thiệu
- Phƣơng pháp Lyapunov cung cấp điều kiện đủ để đánh giá tính ổn định của hệ phi
tuyến.
- Có thể áp dụng cho hệ phi tuyến bậc cao bất kỳ.
- Có thể dùng phƣơng pháp Lyapunov để thiết kế các bộ điểu khiển phi tuyến.
- Hiện nay phƣơng pháp Lyapunov là phƣơng pháp đƣợc sử dụng rộng rãi nhất để
phân tích và thiết kế hệ phi tuyến.
9.4.2. Một số định nghĩa
Xét hệ phi tuyến mô tả bởi phƣơng trình trạng thái sau:
x f ( x, u)
Định nghĩa: Một điểm trạng thái x * đuợc gọi là điểm cân bằng nếu nhƣ khi đang ở
điểm trạng thái x * và không có tác động nào từ bên ngoài thì hệ sẽ nằm nguyên tại đó.
Dễ thấy điểm cân bằng phải là nghiệm của phƣơng trình:
x f ( x, u) u 0 0
Hệ phi tuyến có thể có nhiều điểm cân bằng họăc không có điểm cân bằng nào. Điều
này hòan tòan khác so với hệ tuyến tính, hệ tuyến tính luôn luôn có 1 điểm cân bằng là
x* = 0
221
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Định nghĩa: Một hệ thống đƣợc gọi là ổn định (tiệm cận) tại điểm cân bằng x * nếu
nhƣ có một tác động tức thời đánh bật hệ ra khỏi x * và đƣa đến đƣợc x 0 thuộc lân cận nào
đó của thì sau đó hệ có khả năng tự quay đƣợc về điểm cân bằng x * ban đầu.
Chú ý: Tính ổn định của hệ phi tuyến chỉ có nghĩa khi đi cùng với điểm cân bằng.
Có thể hệ ổn định tại điểm cân bằng này nhƣng không ổn định tại điểm cân bằng khác.
Định nghĩa: Cho hệ phi tuyến không kích thích mô tả bởi phƣơng trình trạng thái:
x f ( x, u) u 0 0 (1)
Giả sử hệ thống có điểm cân bằng x * = 0
Hệ thống đƣợc gọi là ổn định Lyapunov tại điểm cân bằng 0 nếu với 0 bất kỳ bao
giờ cũng tồn tại phụ thuộc sao cho nghiệm x(t) của phƣơng trình (1) với điều kiện
đầu x(0) thỏa mãn:
x(0) x(t ) , t 0
Hệ thống đƣợc gọi là ổn định tiệm cận Lyapunov tại điểm cân bằng 0 nếu 0 với
bất kỳ bao giờ cũng tồn tại phụ thuộc sao cho nghiệm x(t) của phƣơng trình (1) với
điều kiện x(0) thỏa mãn:
lim x(t ) 0
t
9.4.3. Phƣơng pháp tuyến tính hóa Lyapunov
Cho hệ thống tuyến phƣơng trình trạng thái:
x f ( x, u) (1)
Giả sử xung quanh cân bằng, hệ thống (1) có thể tuyến tính hóa về dạng:
~
x A~
x Bu~ (2)
Định lý:
Nếu hệ thống tuyến tính hóa (2) ổn định thì hệ phi tuyến (1) ổn định tiệm cận tại
điểm cân bằng x * .
Nếu hệ thống tuyến tính hóa (2) không ổn định thì hệ phi tuyến (1) không ổn định tại
điểm cân bằng x * .
Nếu hệ thống tuyến tính hóa (2) ở biên giới ổn định thì không kết luận đƣợc gì về
tính ổn định của hệ phi tuyến tại điểm cân bằng x * .
Phƣơng pháp trực tiếp Lyapunov
Định lý: Cho hệ phi tuyến không kích thích mô tả bởi phƣơng trình trạng thái:
x f ( x, u) u 0 0 (1)
222
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Chương 9: Hệ thống điều khiển phi tuyến
Giả sử hệ thống có điểm cân bằng x * = 0
Nếu tồn tại hàm V(x) sao cho:
i) V (0) 0
ii ) V ( x) 0, x 0
iii ) V ( x) 0, x 0
Thì hệ thống (1) ổn định Lyapunov tại điểm 0.
Chú ý: Hàm V(x) thƣờng đƣợc chọn là hàm toàn phƣơng theo biến trạng thái.
223
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Phụ lục
Bảng biến đổi Laplace và biến đổi Z
STT Hàm Laplace F(s) Hàm thời gian f(t) Hàm z f(z)
1 1 Hàm Dirac (t) 1
2 1 Hàm nấc đơn vị u(t)= 1(t) z
s z 1
3 1 t Tz
s2 ( z 1) 2
4 1 t2 T 2 z ( z 1)
s3 2 2( z 1) 3
5 1 tn (1) n n z
l im aT
s n 1 n! a 0 n! a z e
n
6 1 e-at z
sa z e aT
7 1 t.e-at Tze aT
( s a) 2 ( z e aT ) 2
8 a 1 - e-at (1 e aT ) z
s( s a) ( z 1)( z e aT )
9 1 1 (e aT e bT ) z
(e at e bt )
( s a)( s b) (b a) ( z e aT ( z e bT )
10 1 1 z[ z e aT (1 aT )]
(1 at )e t
s( s a) 2 a 2
( z e aT ) 2
11 a 1 e at z[(aT 1 e aT ) z (1 e aT aTe aT )]
t
s ( s a)
2
a a( z 1) 2 ( z e aT )
12 a sinat z sin aT
s2 a2 z 2 z cos aT 1
2
224
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
Phụ lục
13 s cosat z ( z cos aT )
s a2
2
z (2 cos aT ) z 1
2
14 e-atsin t z e aT sin T
( s a)
2 2
z 2 2 ze aT cos T e 2 aT
15 sa e-atcos t z 2 ze aT cos T
( s a) 2 2 z 2 2 ze aT cos T e 2 aT
16 a2 1 - (1+ at)e-at z z aTe aT z
s( s a) 2 z 1 z e aT ( z e aT )2
17 1 1 e at be bt ( Az B) z
s( s a)( s b) ab a(a b) b(b a) ( z e )( z e bT )( z 1)
aT
b(1 e aT ) a(1 e bT )
A
ab(b a)
ae aT (1 e bT ) be bT (1 e aT )
B
ab(b a)
225
Téléchargé par duy anh (duy2004918@gmail.com)
lOMoARcPSD|36575266
- Tài liệu tham khảo
[1]. Nguyễn Phƣơng Hà, Lí thuyết Điều khiển Tự động, NXB ĐH Quốc gia, 2005.
[2]. Lƣơng Văn Lăng, Cơ sở tự động, NXB ĐH Quốc gia, 2002.
[3]. Benjamin C. Kuo, Automatic Control Systems, Prentice-Hall, 2002.
[4]. Katsuhiko Ogata, Modern Control Engineering, Prentice-Hall, 2002.
.
226
Téléchargé par duy anh (duy2004918@gmail.com)
You might also like
- Thiết bị và hệ thống tự độngDocument336 pagesThiết bị và hệ thống tự độngMì Xào75% (12)
- Bai Giang Ly Thuyet Dieu Khien Tu DongDocument227 pagesBai Giang Ly Thuyet Dieu Khien Tu Dongcaovanduy18092004No ratings yet
- Bai Giang Mon Hoc Ly Thuyet Dieu Khien Tu Dong (Cuuduongthancong - Com)Document227 pagesBai Giang Mon Hoc Ly Thuyet Dieu Khien Tu Dong (Cuuduongthancong - Com)Trần NhậtNo ratings yet
- Giao Trinh LTDKTD - FullDocument226 pagesGiao Trinh LTDKTD - FulllequanthongtlNo ratings yet
- Kỹ Thuật Điều Khiển Tự ĐộngDocument199 pagesKỹ Thuật Điều Khiển Tự ĐộngHồ Đức ThịnhNo ratings yet
- Chap 1Document31 pagesChap 1Nam LưuNo ratings yet
- T NG H P KTDKTDDocument328 pagesT NG H P KTDKTDNam LưuNo ratings yet
- Ly Thuyet Dieu Khien Tu DongDocument77 pagesLy Thuyet Dieu Khien Tu DongĐạt NguyễnNo ratings yet
- Bài giảngDocument89 pagesBài giảngk225510303115No ratings yet
- Co So Dieu Khien Tu DongDocument152 pagesCo So Dieu Khien Tu Dongapi-3852638100% (1)
- Bài 1. Dai Cuong Ve May TinhDocument32 pagesBài 1. Dai Cuong Ve May TinhPhạm Ngọc VĩNo ratings yet
- Noi Dung Luan Van Chinh Sua Sau Bao VeDocument78 pagesNoi Dung Luan Van Chinh Sua Sau Bao VeSĩ HùngNo ratings yet
- Giao Trinh Ly Thuyet Dieu Khien Tu DongDocument148 pagesGiao Trinh Ly Thuyet Dieu Khien Tu DongSát Thủ Vô TìnhNo ratings yet
- MauTrinhBay Assignment AUT109Document36 pagesMauTrinhBay Assignment AUT109Trịnh Đình PhươngNo ratings yet
- Bài Giảng hệ thống điều khiển tự độngDocument88 pagesBài Giảng hệ thống điều khiển tự độngTM QNo ratings yet
- Lý thuyết điều Khiển Tự Động: Giáo trìnhDocument25 pagesLý thuyết điều Khiển Tự Động: Giáo trìnhTrung Võ Lê MinhNo ratings yet
- Asm - Giai Đo N 1 (LTĐKTĐ)Document34 pagesAsm - Giai Đo N 1 (LTĐKTĐ)Béo TiếnNo ratings yet
- Bài 01 Ly Thuyet Dieu Khien Tu DongDocument30 pagesBài 01 Ly Thuyet Dieu Khien Tu DongDoan Khai Uy100% (1)
- Chuong 1 - Những Khái Niệm Cơ BảnDocument76 pagesChuong 1 - Những Khái Niệm Cơ BảnPhạm KhiêmNo ratings yet
- Đề cương LTĐKTĐDocument17 pagesĐề cương LTĐKTĐNguyễn Duy TháiNo ratings yet
- Chapter 2-ME5615-Chỉ Tiêu Chất Lượng HTCĐTDocument21 pagesChapter 2-ME5615-Chỉ Tiêu Chất Lượng HTCĐTDương Bá LinhNo ratings yet
- ĐC LTĐKTĐDocument41 pagesĐC LTĐKTĐnbminh210903No ratings yet
- Mechatronics 1Document24 pagesMechatronics 1kien vuNo ratings yet
- đề cương đk tự độngDocument7 pagesđề cương đk tự độngĐộ vlogsNo ratings yet
- Hệ Thống Điều Khiển Số - Đặng Văn Mỹ 2015 PDFDocument45 pagesHệ Thống Điều Khiển Số - Đặng Văn Mỹ 2015 PDFVan Tung HaNo ratings yet
- HUST PPT Template 2020 Blue 16x9 2Document23 pagesHUST PPT Template 2020 Blue 16x9 2Ta KONo ratings yet
- Cau Hoi On Tap Li ThuyetDocument7 pagesCau Hoi On Tap Li ThuyetVũ Quý DươngNo ratings yet
- BTL HoanchinhDocument28 pagesBTL HoanchinhKhánh NguyễnNo ratings yet
- KTDKTD PDFDocument199 pagesKTDKTD PDFPhú Thịnh LêNo ratings yet
- Các Phần Tử Trong Hệ Thống Tự Động Điều Khiển Quá TrìnhDocument22 pagesCác Phần Tử Trong Hệ Thống Tự Động Điều Khiển Quá TrìnhVăn Nguyễn ChungNo ratings yet
- 48-Trịnh Anh Quyền-2020603185Document33 pages48-Trịnh Anh Quyền-2020603185Sang ĐỗNo ratings yet
- DKTD Full Bài FixedDocument136 pagesDKTD Full Bài FixedLong TrầnNo ratings yet
- Bài Mái Che T Đ NGDocument49 pagesBài Mái Che T Đ NGBao NgocNo ratings yet
- Lý Thuyết LTĐKTĐDocument19 pagesLý Thuyết LTĐKTĐducNo ratings yet
- 02.LTDKTD - Buổi 2 - Chương 1-Một Số Khái Niệm Cơ BảnDocument37 pages02.LTDKTD - Buổi 2 - Chương 1-Một Số Khái Niệm Cơ Bảnkachi huNo ratings yet
- Chuong 1Document67 pagesChuong 1TÀI NGUYỄN THÀNHNo ratings yet
- Đo Lư NG Năm 3Document43 pagesĐo Lư NG Năm 3Nguyễn LyNo ratings yet
- Bài Giảng-HTĐKTMDocument173 pagesBài Giảng-HTĐKTMNguyễn V. NhấtNo ratings yet
- GT THHDC1Document14 pagesGT THHDC1Thuong NguyenNo ratings yet
- DKQT2013Document119 pagesDKQT2013Thiên HảiNo ratings yet
- File DC 024040Document11 pagesFile DC 024040pertinenteNo ratings yet
- Bài Giảng Điều Khiển Số 2022Document32 pagesBài Giảng Điều Khiển Số 2022Đỗ Văn CầnNo ratings yet
- BaiGiang CDT44Document65 pagesBaiGiang CDT44cmanh1722No ratings yet
- Chương 36Document12 pagesChương 36Nguyễn Hải ĐăngNo ratings yet
- Slide 1 KTDKTD - Capnhat2021Document78 pagesSlide 1 KTDKTD - Capnhat2021Đặng Văn HoanNo ratings yet
- AutomaticDocument22 pagesAutomaticBắc Trần vănNo ratings yet
- C1. Điều Khiển LogicDocument72 pagesC1. Điều Khiển LogicHậu VũNo ratings yet
- Thiết kế bộ điều khiển máy phát điện không đồng bộ nguồn kép kết hợp phương pháp tựa theo thụ động Euler-Lagrange (EL) và luật HamiltonianDocument7 pagesThiết kế bộ điều khiển máy phát điện không đồng bộ nguồn kép kết hợp phương pháp tựa theo thụ động Euler-Lagrange (EL) và luật HamiltonianpvdaiNo ratings yet