You might also like
- Sci Tech 2023 V20Document15 pagesSci Tech 2023 V20Vishnu RamNo ratings yet
- Applications of Nastran in Gust Response AnalysisDocument24 pagesApplications of Nastran in Gust Response AnalysiskarthikkrishnamurthyNo ratings yet
- Stability Derivatives of X-11 AircraftDocument14 pagesStability Derivatives of X-11 AircrafthaivijayanandNo ratings yet
- Aircraft Control SystemsDocument10 pagesAircraft Control Systemsmac_08No ratings yet
- An Analysis and Correlation of Aircraft Wave Drag - HarrisDocument70 pagesAn Analysis and Correlation of Aircraft Wave Drag - HarrisTRFNo ratings yet
- Aiaa 2011 573 500Document17 pagesAiaa 2011 573 500Rajeev Raj'sNo ratings yet
- A Comparative Assessment of Flutter Prediction TechniquesDocument34 pagesA Comparative Assessment of Flutter Prediction TechniquesTheNo ratings yet
- Airport Taxiway OptimizationDocument44 pagesAirport Taxiway OptimizationMojdeh SoltaniNo ratings yet
- Aeroservoelastic Modeling, Analysis, and Design Techniques PDFDocument12 pagesAeroservoelastic Modeling, Analysis, and Design Techniques PDFkarthekeyanmenonNo ratings yet
- Some Applications of A Panel Method To Aerodynamic Modelling of MissilesDocument10 pagesSome Applications of A Panel Method To Aerodynamic Modelling of Missilesoso5755No ratings yet
- Airfoil Shape OptimizationDocument7 pagesAirfoil Shape OptimizationLuca AnzideiNo ratings yet
- Data-Based Approach For Fast Airfoil Analysis and OptimizationDocument26 pagesData-Based Approach For Fast Airfoil Analysis and OptimizationMelese LegamoNo ratings yet
- Aerodynamic Derivatives Tandem Rotor Transport Helicopter NASA Report 1581Document57 pagesAerodynamic Derivatives Tandem Rotor Transport Helicopter NASA Report 1581KaradiasNo ratings yet
- Air Data Computation in Fly by Wire FligDocument6 pagesAir Data Computation in Fly by Wire Fligaeroexito-1No ratings yet
- Design of A Scaled RPV For Investigation of Gust Response of Joined-Wing SesnorcraftDocument14 pagesDesign of A Scaled RPV For Investigation of Gust Response of Joined-Wing SesnorcraftTestNo ratings yet
- Estimation of Aerodynamic Parameters Near Stall Using Maximum Likelihood and Extreme Learning Machine Based MethodsDocument21 pagesEstimation of Aerodynamic Parameters Near Stall Using Maximum Likelihood and Extreme Learning Machine Based MethodsAshwani SinghNo ratings yet
- 3Hwhu:Hldqg% (QJ) +$Dfkhq8Qlyhuvlw/Ri$Ssolhg6Flhqfhv 'Hsduwphqwiru) Oljkw6/Vwhpv) Oljkw Xlgdqfhdqg&Rqwuro $DFKHQ HupdqDocument10 pages3Hwhu:Hldqg% (QJ) +$Dfkhq8Qlyhuvlw/Ri$Ssolhg6Flhqfhv 'Hsduwphqwiru) Oljkw6/Vwhpv) Oljkw Xlgdqfhdqg&Rqwuro $DFKHQ Hupdq224883061No ratings yet
- IJMPERD - Investigation Potential Flow About Curved WingDocument12 pagesIJMPERD - Investigation Potential Flow About Curved WingTJPRC PublicationsNo ratings yet
- Optimization Criteria and Sailplane AirfDocument5 pagesOptimization Criteria and Sailplane AirfNathan FunchalNo ratings yet
- Comparative Investigation of VLM Codes For Joined-WingDocument5 pagesComparative Investigation of VLM Codes For Joined-WingInternational Journal of Research in Engineering and TechnologyNo ratings yet
- A Systematic Comparison Between RANS and Panel Methods For Propeller Analysis 4435Document13 pagesA Systematic Comparison Between RANS and Panel Methods For Propeller Analysis 4435cupidkhhNo ratings yet
- Papper 2Document11 pagesPapper 2Varghese MathewNo ratings yet
- Multi-Objective Optimization of A Hypersonic Inlet Using Generalized Outflow Boundary Conditions in The Continuous Adjoint MethodDocument25 pagesMulti-Objective Optimization of A Hypersonic Inlet Using Generalized Outflow Boundary Conditions in The Continuous Adjoint MethodVidushee GeetamNo ratings yet
- Aiac 2007 073Document18 pagesAiac 2007 073Mehreen AzamNo ratings yet
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- Ame02 PDFDocument10 pagesAme02 PDFBogdan GargovNo ratings yet
- Parametric Airfoils and WingsDocument17 pagesParametric Airfoils and Wingsmunawar mahtabNo ratings yet
- Aiaa 2005 6027Document14 pagesAiaa 2005 6027SanteBrucoliNo ratings yet
- NASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible FlowDocument79 pagesNASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible Flowmssj87No ratings yet
- Numerical and Experimental Investigations On Subsonic Air Intakes With Serpentine Ducts For UAV ConfigurationsDocument22 pagesNumerical and Experimental Investigations On Subsonic Air Intakes With Serpentine Ducts For UAV ConfigurationsSantosa Edy WibowoNo ratings yet
- ICAS2022 0367 PaperDocument13 pagesICAS2022 0367 Papersanskar.maddiNo ratings yet
- Navier - Stokes Optimization Using Genetic Algorithm and A FlexibleDocument7 pagesNavier - Stokes Optimization Using Genetic Algorithm and A FlexibleVasu BansalNo ratings yet
- Hypersonic Boundary-Layer Trip Development For HypDocument13 pagesHypersonic Boundary-Layer Trip Development For HypMichał RolczyńskiNo ratings yet
- 57 210Document9 pages57 210SulaimanNo ratings yet
- 2017 VanDenHoek EuroGNCDocument21 pages2017 VanDenHoek EuroGNCaaaaNo ratings yet
- Numerical Investigations of The Benchmark Supercritical Wing in Transonic FlowDocument20 pagesNumerical Investigations of The Benchmark Supercritical Wing in Transonic FlowRobert DaltonNo ratings yet
- A Cell-Vertex Multigrid Method For The Navier-StokDocument42 pagesA Cell-Vertex Multigrid Method For The Navier-StokludokellypNo ratings yet
- Geometry Build Up CorrelationsDocument17 pagesGeometry Build Up CorrelationsSidi Moulaye SidneNo ratings yet
- Differential Presssure Based Angle of Attack Estimation in A Flush Air Data System (FADS)Document7 pagesDifferential Presssure Based Angle of Attack Estimation in A Flush Air Data System (FADS)Naji YakzanNo ratings yet
- CFX Simulation For Predicting DragDocument3 pagesCFX Simulation For Predicting DragLarryLevon88No ratings yet
- Modeling The Fuel Flow Rate of Transport Aircraft During Flight Phases Using Genetic Algorithm Optimized Neural NetworkDocument11 pagesModeling The Fuel Flow Rate of Transport Aircraft During Flight Phases Using Genetic Algorithm Optimized Neural NetworkNallely MassoNo ratings yet
- Optimization: of Joined-Wing AircraftDocument10 pagesOptimization: of Joined-Wing AircraftSagar KulkarniNo ratings yet
- Maximum Range Glide of A Supersonic Aircraft in The Presence of WindDocument24 pagesMaximum Range Glide of A Supersonic Aircraft in The Presence of WindAseem NevrekarNo ratings yet
- Aircraft Design in A Nutshell PDFDocument25 pagesAircraft Design in A Nutshell PDFYvessNo ratings yet
- 2 Denner1998Document12 pages2 Denner1998makbuleesrasircaNo ratings yet
- CP 013Document8 pagesCP 013moein_joon27No ratings yet
- Flight Dynamics and Control of Air-Breathing Hypersonic Vehicles: Review and New DirectionsDocument24 pagesFlight Dynamics and Control of Air-Breathing Hypersonic Vehicles: Review and New DirectionsP_leeNo ratings yet
- Itmconf Cmes-17 07008Document6 pagesItmconf Cmes-17 07008j2002dabdNo ratings yet
- Cued Control 950Document19 pagesCued Control 950Adrian DincaNo ratings yet
- Development of An Original Process For The Preliminary Design of An Uav System Based On Multiple ModulesDocument23 pagesDevelopment of An Original Process For The Preliminary Design of An Uav System Based On Multiple ModulesTarik Hassan ElsonniNo ratings yet
- CBR Pavement Design MethodDocument10 pagesCBR Pavement Design MethodSkerdi MucoNo ratings yet
- Computerized Method For Design of Propeller BladeDocument10 pagesComputerized Method For Design of Propeller BladePavan KishoreNo ratings yet
- 2006249454Document20 pages2006249454sh_nk2010No ratings yet
- Biber - 2004 - Supercrit Airfoil Desgn Future HALEDocument9 pagesBiber - 2004 - Supercrit Airfoil Desgn Future HALEJasoos ParrierNo ratings yet
- Computerized: Method Design DiameterDocument10 pagesComputerized: Method Design DiameterPavan KishoreNo ratings yet
- NASA Small Aircraft Gust LoadsDocument12 pagesNASA Small Aircraft Gust LoadsRichard MayNo ratings yet
- David J. Willis, Jaime Peraire and Jacob K. White - A Combined pFFT-Multipole Tree Code, Unsteady Panel Method With Vortex Particle WakesDocument20 pagesDavid J. Willis, Jaime Peraire and Jacob K. White - A Combined pFFT-Multipole Tree Code, Unsteady Panel Method With Vortex Particle WakesVing666789No ratings yet
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- Signal Processing of Airborne Radar Stations: Plane Flight Control in Difficult MeteoconditionsFrom EverandSignal Processing of Airborne Radar Stations: Plane Flight Control in Difficult MeteoconditionsNo ratings yet
- GoizuetaDocument17 pagesGoizuetaGabrielNo ratings yet
- Al-Mashhadani (2017)Document20 pagesAl-Mashhadani (2017)GabrielNo ratings yet
- PADT TheFocus 43-1Document4 pagesPADT TheFocus 43-1GabrielNo ratings yet
- Aa v1 I3 Component Mode SynthesisDocument2 pagesAa v1 I3 Component Mode SynthesisGabrielNo ratings yet
- Our Changing WorldDocument3 pagesOur Changing Worlddinesh869863% (8)
- Polynesian MigrationsDocument2 pagesPolynesian Migrationskinneyjeffrey100% (1)
- Coord Angle and BearingDocument18 pagesCoord Angle and BearingvNo ratings yet
- The Mind of A MnemonistDocument4 pagesThe Mind of A MnemonistboobeeaaaNo ratings yet
- 8000series Tech Datasheet 2018Document3 pages8000series Tech Datasheet 2018lucky414No ratings yet
- Product Life Cycle ManagementDocument35 pagesProduct Life Cycle ManagementRahul KumarNo ratings yet
- PT Activity 3.4.2: Troubleshooting A VLAN Implementation: Topology DiagramDocument3 pagesPT Activity 3.4.2: Troubleshooting A VLAN Implementation: Topology DiagramMatthew N Michelle BondocNo ratings yet
- BotanyDocument11 pagesBotanyGirish GuptaNo ratings yet
- SEC - Connection Guidelines - v3 - CleanDocument54 pagesSEC - Connection Guidelines - v3 - CleanFurqan HamidNo ratings yet
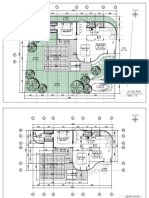
- 2023.01.25 Plan Pecatu Villa - FinishDocument3 pages2023.01.25 Plan Pecatu Villa - FinishTika AgungNo ratings yet
- Installation 3G Network ElementsDocument108 pagesInstallation 3G Network ElementsSDE RF WESTNo ratings yet
- Distance Relay BasicsDocument58 pagesDistance Relay Basicsaalamz93_854917254100% (1)
- Brewers Pallette PosterDocument1 pageBrewers Pallette PosterAnonymous hP6ab2D1ppNo ratings yet
- AMORC What Constitutes A High Degree Member in AMORC 2Document3 pagesAMORC What Constitutes A High Degree Member in AMORC 2Francis EjikeNo ratings yet
- Mesoamerica: Where Civilizations Flourished, and Crashed, RepeatedlyDocument8 pagesMesoamerica: Where Civilizations Flourished, and Crashed, RepeatedlyEnvyAmarr •No ratings yet
- State of Stealth FINAL 121317Document41 pagesState of Stealth FINAL 121317Muhammad Afzaal100% (2)
- Transport of Dangerous GoodsDocument16 pagesTransport of Dangerous Goodskeaty100% (1)
- RymesDocument6 pagesRymesFarida YesminNo ratings yet
- CW9 Identifying Functions 5Document2 pagesCW9 Identifying Functions 5Xavier BurrusNo ratings yet
- Keeling 1960 PDFDocument4 pagesKeeling 1960 PDFErick AmâncioNo ratings yet
- Invertebrate ZoologyDocument1,016 pagesInvertebrate ZoologyRACHANA PURKAYASTHA 2140623No ratings yet
- Blood Physiology 2022Document116 pagesBlood Physiology 2022Gurmessa FekaduNo ratings yet
- Quiz 2 Principles of DesignDocument4 pagesQuiz 2 Principles of DesignJovito Reyes0% (1)
- O Level Physics ATP ReferencesDocument4 pagesO Level Physics ATP ReferencesHassan Ali BhuttaNo ratings yet
- Newton Papers Letter Nat Phil Cohen EdDocument512 pagesNewton Papers Letter Nat Phil Cohen EdFernando ProtoNo ratings yet
- 5276Document52 pages5276Sean PorterNo ratings yet
- Case Report - Anemia Ec Cervical Cancer Stages 2bDocument71 pagesCase Report - Anemia Ec Cervical Cancer Stages 2bAnna ListianaNo ratings yet
- Manual HB ISM112 EDocument106 pagesManual HB ISM112 EALFAKNo ratings yet
- GFRC Floating Concrete Hearth For Concrete Wood FiDocument11 pagesGFRC Floating Concrete Hearth For Concrete Wood FiJuliano. PQMNo ratings yet
- Livro Vertex MACIOCIADocument62 pagesLivro Vertex MACIOCIAxandinhag100% (5)