You might also like
- The LEGO Castle Book - Build Your Own Mini Medieval WorldDocument206 pagesThe LEGO Castle Book - Build Your Own Mini Medieval WorldHeng DiNo ratings yet
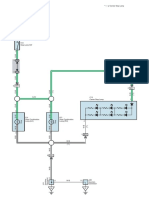
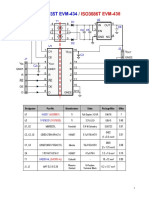
- 2010 New Electric Drawing-FUJI YIDA - 1Document16 pages2010 New Electric Drawing-FUJI YIDA - 1oro plata100% (1)
- Fittings Grease GuideDocument10 pagesFittings Grease GuideveereshNo ratings yet
- Composite Materials: Presented by Pratibha PathakDocument28 pagesComposite Materials: Presented by Pratibha PathakPRANJAL KUMARNo ratings yet
- Construction Waterproofing MaterialsDocument11 pagesConstruction Waterproofing MaterialsAyush TiwariNo ratings yet
- DSO150 UserManual Shell NewDocument4 pagesDSO150 UserManual Shell NewAnonymous dGFqrw5vONo ratings yet
- Fuji Yida Plano Electrico Yaskawa H1000Document14 pagesFuji Yida Plano Electrico Yaskawa H1000oro plata100% (2)
- Prestress 2Document14 pagesPrestress 2princesaleemNo ratings yet
- Example in Civil ConstructionsDocument7 pagesExample in Civil ConstructionsAlex PantiruNo ratings yet
- VOR2 Manual ENGDocument6 pagesVOR2 Manual ENGJohn AdamNo ratings yet
- Attitude Indicator Manual ENG 170904Document18 pagesAttitude Indicator Manual ENG 170904John AdamNo ratings yet
- Dokumen - Tips - Agnee Worm Speed Reducer Complete LiteratureDocument16 pagesDokumen - Tips - Agnee Worm Speed Reducer Complete Literatureprasad.jppmNo ratings yet
- SBD Plummer Block Housings For Bearings On An Adapter Sleeve and A Stepped Shaft - TCM - 12-231180Document3 pagesSBD Plummer Block Housings For Bearings On An Adapter Sleeve and A Stepped Shaft - TCM - 12-231180gopalNo ratings yet
- SBD Plummer Block Housings For Bearings On An Adapter Sleeve and A Stepped Shaft - TCM - 12-231180Document3 pagesSBD Plummer Block Housings For Bearings On An Adapter Sleeve and A Stepped Shaft - TCM - 12-231180gopalNo ratings yet
- HH2 - 4抓取组件,输送组件 (B5) P996-1000-T5-watermarkDocument5 pagesHH2 - 4抓取组件,输送组件 (B5) P996-1000-T5-watermarkNikitaNo ratings yet
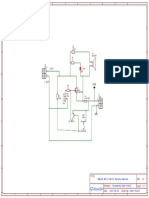
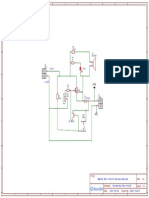
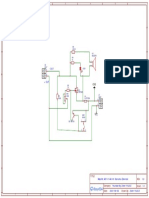
- Schematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Document1 pageSchematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Randi MadinZaridNo ratings yet
- Schematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Document1 pageSchematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Ricardo FantiniNo ratings yet
- Mosfet A R Ak M Koruma Devresi: Title: Rev: Sheet: Drawn By: CompanyDocument1 pageMosfet A R Ak M Koruma Devresi: Title: Rev: Sheet: Drawn By: Companyhuutinh leNo ratings yet
- Schematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Document1 pageSchematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Osmel Barbier cardozaNo ratings yet
- Schematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Document1 pageSchematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Randi MadinZaridNo ratings yet
- Schematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Document1 pageSchematic - Mosfet Aşırı Akım Koruma Devresi - 2021!08!06Juan Carlos VillegasNo ratings yet
- Section F Section F: TransmissionDocument1 pageSection F Section F: TransmissionigorotelamazoneNo ratings yet
- Holding Bar (Optional) : Back Plunger Type Dial Indicators Series 1Document1 pageHolding Bar (Optional) : Back Plunger Type Dial Indicators Series 1somkiat kongprasiatNo ratings yet
- Drylin W Modular Guide Systems - Product Range: Order Example Delivery Time PricesDocument2 pagesDrylin W Modular Guide Systems - Product Range: Order Example Delivery Time PricesPaulo CarvalhoNo ratings yet
- VW 0421 en EditDocument4 pagesVW 0421 en Editmarcos vinicios ribeiro de souzaNo ratings yet
- 018 Ect 3 MDocument8 pages018 Ect 3 MFausto LojaNo ratings yet
- Effect of Internal Transistor Capacitances:: At, The Due To, and The Amplifier Response. But The WillDocument46 pagesEffect of Internal Transistor Capacitances:: At, The Due To, and The Amplifier Response. But The WillMuthukrishnan Vijayan VijayanNo ratings yet
- Parts List SC 800: I File NoDocument6 pagesParts List SC 800: I File NoAnuar HsNo ratings yet
- Adaptable Gear CatalogueDocument8 pagesAdaptable Gear CatalogueJay Doshi ShashikantNo ratings yet
- Cartridge Valves Accessories: Directional Valve Manual Rotary Components - Installation InstructionsDocument2 pagesCartridge Valves Accessories: Directional Valve Manual Rotary Components - Installation InstructionsMichał A.No ratings yet
- SBD30-100XL 01 Uk PDFDocument5 pagesSBD30-100XL 01 Uk PDFhepcomotionNo ratings yet
- c85 - c75 Cilindros SMCDocument122 pagesc85 - c75 Cilindros SMCMarcelo SantosNo ratings yet
- Step Down Converter V I: 1k R1 10k R2 204-10UYC/S530-A3 Led1Document1 pageStep Down Converter V I: 1k R1 10k R2 204-10UYC/S530-A3 Led1Gaetano CaccavalloNo ratings yet
- SBD Plummer Block Housings For Bearings On A Cylindrical Seat and A Stepped Shaft - TCM - 12-231177Document3 pagesSBD Plummer Block Housings For Bearings On A Cylindrical Seat and A Stepped Shaft - TCM - 12-231177Akash RockNo ratings yet
- Elmeasure 8400Document40 pagesElmeasure 8400Pandu Birumakovela50% (2)
- SRS Air Bag SistemDocument7 pagesSRS Air Bag SistemAlexis ValleNo ratings yet
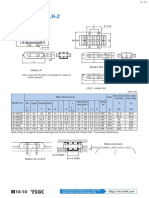
- LR and LR-Z LRADocument2 pagesLR and LR-Z LRAPerfil DE Aluminio T-slotNo ratings yet
- CHPTR 1 - Freq Response of BJT Amplifier (Part (II)Document22 pagesCHPTR 1 - Freq Response of BJT Amplifier (Part (II)Aryo Prastyo AjiNo ratings yet
- (BAT) 1: W/ Center Stop LampDocument1 page(BAT) 1: W/ Center Stop LampLeo FlorezNo ratings yet
- Jadwal 2022-2023 - Revisi September 202Document2 pagesJadwal 2022-2023 - Revisi September 202rmts0909No ratings yet
- 2 Simple DC CCTDocument54 pages2 Simple DC CCTiman qasidahNo ratings yet
- Features and Advantages of P - SeriesDocument4 pagesFeatures and Advantages of P - SeriesVarun KumarNo ratings yet
- 2010 NEW ELECTRIC DRWING - (New)Document14 pages2010 NEW ELECTRIC DRWING - (New)thanggimme.phanNo ratings yet
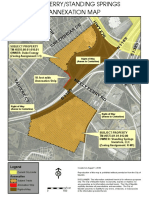
- Neely Ferry/standing Springs Annexation MapDocument1 pageNeely Ferry/standing Springs Annexation MapGabe CavallaroNo ratings yet
- Afs BDocument15 pagesAfs BMaiChiVuNo ratings yet
- Line Segments WorksheetDocument5 pagesLine Segments Worksheetbby lee100% (1)
- 2020-2021 Indexable Tools CatalogDocument1,059 pages2020-2021 Indexable Tools CatalogАлексей СтепинNo ratings yet
- Yaris Sport VSS1 LHD PW625 0D000 AIM 004 182 1Document49 pagesYaris Sport VSS1 LHD PW625 0D000 AIM 004 182 1batto1No ratings yet
- Schematic INDICT 2022-04-15Document1 pageSchematic INDICT 2022-04-15Marko MatićNo ratings yet
- MB Sar1 07 16 Am1 enDocument2 pagesMB Sar1 07 16 Am1 enKahl YeongNo ratings yet
- Pillow Bearings Complete Catalogue For ReferenceDocument181 pagesPillow Bearings Complete Catalogue For ReferencemiteshmayurNo ratings yet
- SrsDocument8 pagesSrsDayro GeneyNo ratings yet
- ACTOM CE BROCHURE-March 2013 LRDocument23 pagesACTOM CE BROCHURE-March 2013 LRWHann Peter ChuiNo ratings yet
- Em01d29 PDFDocument4 pagesEm01d29 PDFJack CardiagNo ratings yet
- MB Sar1 07 16 Ac1 enDocument2 pagesMB Sar1 07 16 Ac1 enyzNo ratings yet
- Air Cylinder: Female Rod End Available As Standard Rod End Styles Suitable For The Application Can Be SelectedDocument96 pagesAir Cylinder: Female Rod End Available As Standard Rod End Styles Suitable For The Application Can Be SelectedDobos LászlóNo ratings yet
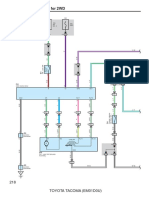
- 9 Avanza: Turn Signal and Hazard Warning Light (Before Aug. 2015 Production)Document1 page9 Avanza: Turn Signal and Hazard Warning Light (Before Aug. 2015 Production)aritw541214No ratings yet
- PCB 25x25mm: +3.3V 1 GND 2Document1 pagePCB 25x25mm: +3.3V 1 GND 2Gonzalo RiveraNo ratings yet
- 81 1 Catalogo Cilindri ENGDocument14 pages81 1 Catalogo Cilindri ENGsundyaNo ratings yet
- QCS - SS Bottom Plates - DetailedDocument11 pagesQCS - SS Bottom Plates - DetailedMohamed JazathNo ratings yet
- 1/D, 1/D K1 4/D, 4/D K3: - 04qa1 - 04qa2Document1 page1/D, 1/D K1 4/D, 4/D K3: - 04qa1 - 04qa2ahmed eldisokyNo ratings yet
- J1 J2 J3 J4: Connector Connector Connector ConnectorDocument2 pagesJ1 J2 J3 J4: Connector Connector Connector ConnectorArvind ScientistNo ratings yet
- DennoithatDocument14 pagesDennoithatQuý Lê VănNo ratings yet
- Tidr 261Document5 pagesTidr 261jay lowkeyNo ratings yet
- Simkits USBTurn Bank Software ManualDocument15 pagesSimkits USBTurn Bank Software ManualJohn AdamNo ratings yet
- Simkits USBAttitude Software ManualDocument15 pagesSimkits USBAttitude Software ManualJohn AdamNo ratings yet
- VOR2 Manual ENGDocument6 pagesVOR2 Manual ENGJohn AdamNo ratings yet
- SHB1000N ManualDocument15 pagesSHB1000N ManualJohn AdamNo ratings yet
- 6 Analog Input USB ControllerDocument2 pages6 Analog Input USB ControllerJohn AdamNo ratings yet
- An21xx TRMDocument334 pagesAn21xx TRMJohn AdamNo ratings yet
- TRC472 USBYoke SystemDocument14 pagesTRC472 USBYoke SystemJohn AdamNo ratings yet
- TDS Fosroc Supercast EPT IndiaDocument2 pagesTDS Fosroc Supercast EPT IndiaAnkur SinghNo ratings yet
- Installation of The Main Shaft Speed SensorDocument3 pagesInstallation of The Main Shaft Speed SensorJames TrottNo ratings yet
- Mason E0010Document24 pagesMason E0010SandeepNo ratings yet
- History OF Architecture: Comparison Between Fatehpur Sikhri and Red Fort By:Murtuza Hilal Chinmay BopacheDocument11 pagesHistory OF Architecture: Comparison Between Fatehpur Sikhri and Red Fort By:Murtuza Hilal Chinmay BopacheChinmay BopcheNo ratings yet
- Final ProjectDocument29 pagesFinal Projectvaishnavi yedurNo ratings yet
- Description Quantity Price Amount Remarks: Cafe Tribu ExtensionDocument4 pagesDescription Quantity Price Amount Remarks: Cafe Tribu Extensionmarco paulo tarucNo ratings yet
- Kevin John Paglinawan: Case StudyDocument2 pagesKevin John Paglinawan: Case StudyKevin John PaglinawanNo ratings yet
- Module History of Architecture 4philippine ArchitectureDocument190 pagesModule History of Architecture 4philippine ArchitectureArdee LinaNo ratings yet
- NAGA3-EP498-SSW-MSF-0023 (A) - MS For Grouting of Sonic Logging Pipes REV.01Document12 pagesNAGA3-EP498-SSW-MSF-0023 (A) - MS For Grouting of Sonic Logging Pipes REV.01Shafiq ZakariahNo ratings yet
- Question 3 Practice (Isabella Bird Text)Document18 pagesQuestion 3 Practice (Isabella Bird Text)17seiernNo ratings yet
- The COMPLETE Cattle Shed (PDFDrive)Document74 pagesThe COMPLETE Cattle Shed (PDFDrive)Haris AliNo ratings yet
- Building Technology 4 ModuleDocument35 pagesBuilding Technology 4 ModuleCARLA PASCUALNo ratings yet
- Keystone 133elite PDocument8 pagesKeystone 133elite PTAHER AMMARNo ratings yet
- ASP Installation ManualDocument16 pagesASP Installation ManualSiniora AkoumNo ratings yet
- Stagecraft ToolsDocument35 pagesStagecraft Toolsbright possibleNo ratings yet
- Eureka CatalogueDocument28 pagesEureka CatalogueReach windowsNo ratings yet
- Hollow Brick Work & JaliDocument29 pagesHollow Brick Work & JaliSOMYA AGARWALNo ratings yet
- Intro To ConstructionDocument34 pagesIntro To Constructionpara diseNo ratings yet
- Earning Outcomes: LSPU Self-Paced Learning Module (SLM)Document27 pagesEarning Outcomes: LSPU Self-Paced Learning Module (SLM)Joanne Cristie Tolopia100% (1)
- Carpet HistoryDocument8 pagesCarpet HistoryPanessar DaleepNo ratings yet
- Global Gypsum: North Africa & Middle East: ReferencesDocument1 pageGlobal Gypsum: North Africa & Middle East: Referenceskariem noweerNo ratings yet
- Civil Wood Shopassignment Group ADocument7 pagesCivil Wood Shopassignment Group AFaith Gwamure JafariNo ratings yet
- Plasterboard EC08 Impact MRDocument4 pagesPlasterboard EC08 Impact MRFarzan BabaeiNo ratings yet
- Final Portfolio - Kaylin McMullanDocument104 pagesFinal Portfolio - Kaylin McMullankaylin mcmullanNo ratings yet
- Culvert: D N G HDocument8 pagesCulvert: D N G HkingdbmNo ratings yet