You might also like
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- Unit 4 Suspension SystemsDocument28 pagesUnit 4 Suspension SystemsMarthandeNo ratings yet
- Power Transmission PDFDocument89 pagesPower Transmission PDFKumar Rajesh85% (54)
- Aquarail JetskiDocument6 pagesAquarail Jetskitony_williams_4No ratings yet
- Design of ClutchDocument47 pagesDesign of Clutchjoyelpaul100% (1)
- Vehicle Suspension DesignDocument63 pagesVehicle Suspension DesignVenkatesh ChegireddyNo ratings yet
- Power Transmission - Gear - Types of Gears - Nomenclature - Applications of Gears - Velocity Ratio - Gear Trains - Example Problems and QuestionsDocument26 pagesPower Transmission - Gear - Types of Gears - Nomenclature - Applications of Gears - Velocity Ratio - Gear Trains - Example Problems and QuestionsNirav PanchalNo ratings yet
- MEE342 - Principles of Mechanical Design: Dr. Haolin ZhuDocument27 pagesMEE342 - Principles of Mechanical Design: Dr. Haolin ZhuBrettNo ratings yet
- Vehicle Body EngineeringDocument37 pagesVehicle Body EngineeringBugulu Bangada100% (1)
- Unit 6: Braking Systems and ClutchesDocument34 pagesUnit 6: Braking Systems and ClutchesMarthandeNo ratings yet
- Clutch DesignDocument33 pagesClutch DesigneldrainyNo ratings yet
- Introduction To GearsDocument28 pagesIntroduction To Gearssandeep_gaikwad2100% (4)
- Safety HandbookDocument118 pagesSafety HandbookNUR FARAH QISTINA BINTI ABDUL JALILNo ratings yet
- 2016 - 1404 - Types of Gears - BearingsDocument78 pages2016 - 1404 - Types of Gears - Bearingspranay kaduNo ratings yet
- BrakesDocument27 pagesBrakesNiño Jhim AndrewNo ratings yet
- WishboneDocument14 pagesWishboneSapana Kudake SK0% (1)
- Rotordynamics Module V56!16!9Document57 pagesRotordynamics Module V56!16!9shubham patil100% (1)
- SPJ150 English ManualDocument22 pagesSPJ150 English ManualtuchidanNo ratings yet
- Power Transmission PDFDocument89 pagesPower Transmission PDFShubhang Charantimath50% (2)
- CIS14-2009 - Guidelines On Construction Activities at NightDocument69 pagesCIS14-2009 - Guidelines On Construction Activities at NightVincent 2020No ratings yet
- Machine Design PresentaionDocument24 pagesMachine Design PresentaionAwais RaoNo ratings yet
- Railway Engineering 3Document31 pagesRailway Engineering 3Sheikh UbaidNo ratings yet
- CH - 4 FrictionDocument30 pagesCH - 4 FrictionParesh BhuvaNo ratings yet
- Unit 3Document126 pagesUnit 3Shubham GuptaNo ratings yet
- Springs: Shammy Kumar Assistant Professor Department of Mechanical Engg. SRM University, CHENNAIDocument25 pagesSprings: Shammy Kumar Assistant Professor Department of Mechanical Engg. SRM University, CHENNAIAshish SinghNo ratings yet
- Quiz No 1: Barometer, Piezometer, Manometer, Differential ManometerDocument32 pagesQuiz No 1: Barometer, Piezometer, Manometer, Differential ManometerAsif NawazNo ratings yet
- MECH3100 Engineering DesignDocument37 pagesMECH3100 Engineering DesignsenthilmhNo ratings yet
- Introduction - Lecture 1-4Document56 pagesIntroduction - Lecture 1-4EMADNo ratings yet
- Clutches Brakes and DynamometersDocument62 pagesClutches Brakes and DynamometersIrfan Shaikh50% (2)
- Technology - : MechanismsDocument10 pagesTechnology - : MechanismstalhaNo ratings yet
- Unit 6 Clutches, BrakesDocument61 pagesUnit 6 Clutches, BrakesSumit KumarNo ratings yet
- Shaft DesignDocument73 pagesShaft Designmeenakumari05No ratings yet
- Chapter 3 - Machine Tool DrivesDocument112 pagesChapter 3 - Machine Tool Drivesaman muleNo ratings yet
- Automotive Suspension Automotive Suspension: DR Ajoy KR Das BML Munjal University Course: Automobile EngineeringDocument51 pagesAutomotive Suspension Automotive Suspension: DR Ajoy KR Das BML Munjal University Course: Automobile EngineeringShivaMadhaNo ratings yet
- Mechanical Vibration Ch-1Document36 pagesMechanical Vibration Ch-1Befikad BekeleNo ratings yet
- Mechanical Vibration Chapter 1Document34 pagesMechanical Vibration Chapter 1Nahum MykingNo ratings yet
- CH45 Suspension SystemsDocument44 pagesCH45 Suspension SystemsSuzan KhouryNo ratings yet
- Chapter 23 BennetDocument36 pagesChapter 23 BennetpapipapiiNo ratings yet
- Emd Micro Project FinalDocument15 pagesEmd Micro Project Finalom pawarNo ratings yet
- Power TransmissionDocument54 pagesPower TransmissionESABEL 15bNo ratings yet
- Inerter Based Suspension SystemsDocument19 pagesInerter Based Suspension SystemsDarshit PatelNo ratings yet
- MMT Mod1Document107 pagesMMT Mod1cattykaif1No ratings yet
- ARCE-Braking System2022Document105 pagesARCE-Braking System2022Woldie KassieNo ratings yet
- Topic2 - Power TrainsDocument36 pagesTopic2 - Power TrainssheilaNo ratings yet
- Djj5133 Engineering Design Case Study 2 Lecturer Name: Mohd Fuaad Bin Fesul Name:Muhammad Haziq Hidayat Bin Rahim MATRIX NO: 23DKM18F2029Document44 pagesDjj5133 Engineering Design Case Study 2 Lecturer Name: Mohd Fuaad Bin Fesul Name:Muhammad Haziq Hidayat Bin Rahim MATRIX NO: 23DKM18F2029Kubheran SelvathuraiNo ratings yet
- Clutches, Brakes and FlywheelsDocument23 pagesClutches, Brakes and FlywheelsNauman KhanNo ratings yet
- Four Types of MotionDocument30 pagesFour Types of MotionRonyNo ratings yet
- Machine Design - II: Tutor: Dr. Owaisur Rahman ShahDocument22 pagesMachine Design - II: Tutor: Dr. Owaisur Rahman Shahjawad khalidNo ratings yet
- Suspention SystemDocument25 pagesSuspention SystemraviNo ratings yet
- Automobile Engineering: TME-802 B. Tech Viii SemDocument33 pagesAutomobile Engineering: TME-802 B. Tech Viii SemAmit TewariNo ratings yet
- Unit 5 ActuatorsDocument18 pagesUnit 5 ActuatorsKAMALJEET SINGHNo ratings yet
- Hotch Kiss DriveDocument50 pagesHotch Kiss DriverajmehaNo ratings yet
- Assignment 2 PP PDFDocument21 pagesAssignment 2 PP PDFjamesplanetearthNo ratings yet
- 4.0 Shaft, Axle & BearingDocument75 pages4.0 Shaft, Axle & BearingphyrdowsNo ratings yet
- Vehicle Systems: Lecture Notes Assoc. Prof. Dr. Levent YÜKSEKDocument49 pagesVehicle Systems: Lecture Notes Assoc. Prof. Dr. Levent YÜKSEKNeerajNo ratings yet
- GearsDocument29 pagesGearsvenkiteshksNo ratings yet
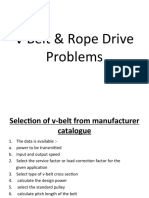
- V Belt & Rope Drive ProblemsDocument18 pagesV Belt & Rope Drive ProblemsarulmuruguNo ratings yet
- Gear & Gear TrainDocument20 pagesGear & Gear Trainniaz kilamNo ratings yet
- Suspension & Brakes System: N. S. Surner SRES College of Engineering, KoprgaonDocument59 pagesSuspension & Brakes System: N. S. Surner SRES College of Engineering, KoprgaonFiroz AminNo ratings yet
- Design and Fabrication of Mechanical Power SteeringDocument20 pagesDesign and Fabrication of Mechanical Power SteeringAkhil NairNo ratings yet
- FlywheelDocument24 pagesFlywheelDivye SethiNo ratings yet
- DiffrentialDocument15 pagesDiffrentialAuto Teaser100% (1)
- Turning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.From EverandTurning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.No ratings yet
- Design Calculation of Leaf Spring For Mazda Jeep: © JUN 2019 - IRE Journals - Volume 2 Issue 12 - ISSN: 2456-8880Document4 pagesDesign Calculation of Leaf Spring For Mazda Jeep: © JUN 2019 - IRE Journals - Volume 2 Issue 12 - ISSN: 2456-8880Shanu KumarNo ratings yet
- IJCRT2306900Document7 pagesIJCRT2306900Shanu KumarNo ratings yet
- JETIR1807286Document13 pagesJETIR1807286Shanu KumarNo ratings yet
- 063732Document10 pages063732Shanu KumarNo ratings yet
- Journal of North East India Studies: Converting The Nagas and Kukis: Missionary RepresentationsDocument22 pagesJournal of North East India Studies: Converting The Nagas and Kukis: Missionary RepresentationsShanu KumarNo ratings yet
- Test Paper English Grade 6Document3 pagesTest Paper English Grade 6Michelle Boclaras LapazNo ratings yet
- Cr3 Code SheetDocument2 pagesCr3 Code Sheetvirus_hunter13No ratings yet
- 1989 Sea Ray 340 Sundancer $32,900Document1 page1989 Sea Ray 340 Sundancer $32,900ee latNo ratings yet
- Fog LightDocument12 pagesFog LightZainal ArifinNo ratings yet
- Railway Gate Control ProjectDocument42 pagesRailway Gate Control ProjectTathagataNo ratings yet
- Compare and Contrast The Advantages and Disadvantages of Public and Private Transport-DikonversiDocument1 pageCompare and Contrast The Advantages and Disadvantages of Public and Private Transport-DikonversiMaulana R100% (2)
- Fender System Front Panel Information Sheet 111201Document5 pagesFender System Front Panel Information Sheet 111201Andika Siregar100% (1)
- Operational PlanDocument3 pagesOperational PlanvivekNo ratings yet
- Bus TicketDocument2 pagesBus TicketNagabhushan BaddiNo ratings yet
- FedEx Vs UPS-SampleQ&ADocument5 pagesFedEx Vs UPS-SampleQ&AMajumder ArpanNo ratings yet
- Preheater Elevator Work Report 3 Check List 45NS0702Document4 pagesPreheater Elevator Work Report 3 Check List 45NS0702eliasNo ratings yet
- Time, Speed & Distance - Part 3 (Trains, & Boats)Document3 pagesTime, Speed & Distance - Part 3 (Trains, & Boats)Shashwat ShuklaNo ratings yet
- 2 Pass by Noise MeasurementDocument5 pages2 Pass by Noise MeasurementnaidujayaNo ratings yet
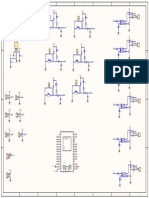
- Schematic PrintDocument1 pageSchematic PrintToàn Nam100% (1)
- Cruise Weekly For Thu 30 Oct 2014 - New CLIA Accreditation Tier, Quantum Delivered, DOT, CruiseManagers and Much MoreDocument2 pagesCruise Weekly For Thu 30 Oct 2014 - New CLIA Accreditation Tier, Quantum Delivered, DOT, CruiseManagers and Much MorecruiseweeklyNo ratings yet
- Principes CEMAT AnglaisDocument37 pagesPrincipes CEMAT AnglaisJonar LamdaganNo ratings yet
- Automatic Detection of Potholes and Speed Breakers: Monica.S, Priyanka Govind Nayak, Pruthvi.J, Soumya.K, Venkatesh S NDocument4 pagesAutomatic Detection of Potholes and Speed Breakers: Monica.S, Priyanka Govind Nayak, Pruthvi.J, Soumya.K, Venkatesh S NChandanaNo ratings yet
- Use of Stainless Steel in Bridges On NH 22-01-2021Document2 pagesUse of Stainless Steel in Bridges On NH 22-01-2021boopathiNo ratings yet
- Yuh Ching Electro Tech Co., LTD.: Proforma InvoiceDocument4 pagesYuh Ching Electro Tech Co., LTD.: Proforma InvoicealejandraNo ratings yet
- Return TicketDocument3 pagesReturn TicketSURAJ ROYNo ratings yet
- 44 Cimbria Jog Conveyor Type ZDocument1 page44 Cimbria Jog Conveyor Type ZMetra ServiceNo ratings yet
- HYdra ResponseDocument9 pagesHYdra Responsesandeepkumar2311No ratings yet
- Belgian Overseas Chartering v. Philipine First InsuranceDocument2 pagesBelgian Overseas Chartering v. Philipine First InsuranceeieipayadNo ratings yet
- Pawan Vaishnav Project ReportDocument59 pagesPawan Vaishnav Project ReportPawan VaishnavNo ratings yet
- Mliiiiiii: Criminal Acts Against Civil AviationDocument100 pagesMliiiiiii: Criminal Acts Against Civil AviationjehobuNo ratings yet
- The Sculptor's FuneralDocument8 pagesThe Sculptor's FuneralaravindpunnaNo ratings yet