You might also like
- Kevin M. Lynch, Frank C. Park - Modern Robotics - Mechanics, Planning, and Control Solutions-Cambridge University Press (2017)Document156 pagesKevin M. Lynch, Frank C. Park - Modern Robotics - Mechanics, Planning, and Control Solutions-Cambridge University Press (2017)brij kishor tiwari100% (1)
- Theory of Machinary-1 PDFDocument258 pagesTheory of Machinary-1 PDFPriya KumarNo ratings yet
- Lathe MachineDocument41 pagesLathe MachineRohit GhulanavarNo ratings yet
- Unit-1-Introduction-To MechanismsDocument59 pagesUnit-1-Introduction-To Mechanismsmanas310jntuhNo ratings yet
- KOM AnimationDocument54 pagesKOM Animationnagarajan224No ratings yet
- Unit 1 Introduction 130404060314 Phpapp01Document55 pagesUnit 1 Introduction 130404060314 Phpapp01Raghavendra KilariNo ratings yet
- Lecture 5Document38 pagesLecture 5Hassan AliNo ratings yet
- Chapter-1 - IntroductionDocument19 pagesChapter-1 - IntroductionVlilvd DvlilvNo ratings yet
- Lecture Note - Introduction of Mechanisms and Machines - CH-1Document41 pagesLecture Note - Introduction of Mechanisms and Machines - CH-1HirenNo ratings yet
- Theory of Machines: Presented By:-Sourabh KumarDocument71 pagesTheory of Machines: Presented By:-Sourabh Kumarpritesh narkhedeNo ratings yet
- Fundamentals of MechanismsDocument10 pagesFundamentals of MechanismsEG209/108489/21 ISAAC DUNCAN MWENDWANo ratings yet
- Kinematics of Machines: Dept of Mechatronics EngineeringDocument54 pagesKinematics of Machines: Dept of Mechatronics EngineeringCHANDRASEKARANNo ratings yet
- CHAPTER 1-IntroductionDocument67 pagesCHAPTER 1-Introductionaymane dibNo ratings yet
- Module 2 Simple Mechanisms EditedDocument58 pagesModule 2 Simple Mechanisms EditedNirshadNo ratings yet
- Introduction To Structures & MechanismsDocument55 pagesIntroduction To Structures & MechanismsDev SundarNo ratings yet
- Theory of Machines - Module 1 NotesDocument25 pagesTheory of Machines - Module 1 NotesrrcsdocsNo ratings yet
- Simple MechanismDocument15 pagesSimple MechanismPrabal SinghNo ratings yet
- Q - No 1-20 NumericalsDocument18 pagesQ - No 1-20 NumericalsBiswajeet MaharanaNo ratings yet
- Tom Notes PDFDocument60 pagesTom Notes PDFdead of writeNo ratings yet
- Introduction To Theory of Machines: June 2015Document9 pagesIntroduction To Theory of Machines: June 2015ADIPESHNo ratings yet
- Bbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesDocument41 pagesBbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesThi KumarNo ratings yet
- Tom NotesDocument77 pagesTom Notesjamunaa83No ratings yet
- Unit-I THEROY OF MACHINESDocument56 pagesUnit-I THEROY OF MACHINESLasya KasireddiNo ratings yet
- CH 2Document42 pagesCH 2Harinath Gowd100% (1)
- Theory of Machine - Kme 603 Question BankDocument11 pagesTheory of Machine - Kme 603 Question BankPrabal SinghNo ratings yet
- KDM Unit-1Document25 pagesKDM Unit-1Achyuth KrishnaNo ratings yet
- Marge Ktom Darshan PDFDocument277 pagesMarge Ktom Darshan PDFjayvik solankiNo ratings yet
- Darshan KTOM CH 1Document25 pagesDarshan KTOM CH 1jayvik solankiNo ratings yet
- BiomaterialsDocument39 pagesBiomaterialsNehanthNo ratings yet
- Mechanisms & Machines: Direction Irrespective of The Direction of Force Applied. ExampleDocument12 pagesMechanisms & Machines: Direction Irrespective of The Direction of Force Applied. ExampleSyed RoshanNo ratings yet
- 01 KOM - 18ME36 - Unit 1 - MechanismsDocument142 pages01 KOM - 18ME36 - Unit 1 - MechanismsKiran Thunuguntla100% (1)
- Lecture Notes For Week One Kinematics of Mechanism 1Document10 pagesLecture Notes For Week One Kinematics of Mechanism 1John KimaniNo ratings yet
- Kinematics of Machines: (Course Code:17ME42)Document63 pagesKinematics of Machines: (Course Code:17ME42)Ruslan ZhukNo ratings yet
- Sample ChapterDocument15 pagesSample ChapterMohammed ImranNo ratings yet
- Mechanics of Machines LEC # 02Document13 pagesMechanics of Machines LEC # 02Tarvesh KumarNo ratings yet
- Mechanics of Machine: Instructor 2k18 SessionDocument43 pagesMechanics of Machine: Instructor 2k18 Sessionaliyan hassanNo ratings yet
- Question 1 OLDocument12 pagesQuestion 1 OLDeni -No ratings yet
- Question and AnswerDocument12 pagesQuestion and AnswerDeni -No ratings yet
- MechanismsDocument16 pagesMechanismsAkunwa GideonNo ratings yet
- Mechanisms 04 PDFDocument20 pagesMechanisms 04 PDFME Ritesh KedarNo ratings yet
- Kinematics of Machinery All Units MaterialDocument77 pagesKinematics of Machinery All Units Materialuma deviNo ratings yet
- Heat ExchangerDocument23 pagesHeat Exchangertekitech443No ratings yet
- Unit 1 - Basics of MechanismsDocument9 pagesUnit 1 - Basics of MechanismsNagendrababu VasaNo ratings yet
- Kom Notes555Document9 pagesKom Notes555Nagendrababu VasaNo ratings yet
- MMD Lecture Notes PDFDocument133 pagesMMD Lecture Notes PDFMukund singhNo ratings yet
- Unit 1Document44 pagesUnit 1Prabal SinghNo ratings yet
- Kinematic Link & PairsDocument28 pagesKinematic Link & PairsAbdussalamNo ratings yet
- Aim: - To Study Various Types of Links, Pairs, Chain and Mechanism, Inversion of Mechanism For TheoryDocument6 pagesAim: - To Study Various Types of Links, Pairs, Chain and Mechanism, Inversion of Mechanism For TheoryAvinash RNo ratings yet
- ME-222-01 (Simple Mechanism)Document32 pagesME-222-01 (Simple Mechanism)Imran TahirNo ratings yet
- ME-222-01 (Simple Mechanism)Document32 pagesME-222-01 (Simple Mechanism)Imran TahirNo ratings yet
- AE2201 2marks PDFDocument30 pagesAE2201 2marks PDFSathis KumarNo ratings yet
- KinematicsDocument25 pagesKinematicsjsph021603No ratings yet
- Econtents of TomDocument88 pagesEcontents of TomSuraj 1212No ratings yet
- MET401 - Theory of MachineDocument161 pagesMET401 - Theory of MachinexilarowNo ratings yet
- Box Transport Mechanism ProjectDocument65 pagesBox Transport Mechanism ProjectAli S79% (43)
- Mechanics of MachineryDocument7 pagesMechanics of MachineryAthul JyothisNo ratings yet
- Mechanics of Machines Part 1Document27 pagesMechanics of Machines Part 1kimosave99No ratings yet
- Theory of Machine ReportDocument10 pagesTheory of Machine ReportABDULREHMAN RASHEEDNo ratings yet
- Introduction To Machine ElementsDocument45 pagesIntroduction To Machine ElementsMike Raphy T. VerdonNo ratings yet
- Unit 123Document66 pagesUnit 123rajashekar reddy nallalaNo ratings yet
- Bme Lab Manual FeDocument37 pagesBme Lab Manual FeArpit PangariaNo ratings yet
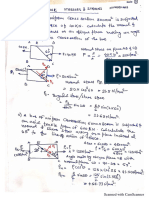
- Principal Stresses Strains NumricalDocument9 pagesPrincipal Stresses Strains NumricalRohit GhulanavarNo ratings yet
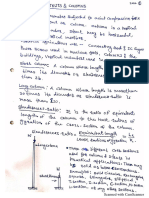
- Struts ColumnsDocument6 pagesStruts ColumnsRohit GhulanavarNo ratings yet
- Theories of FailureDocument7 pagesTheories of FailureRohit GhulanavarNo ratings yet
- Unit 4Document2 pagesUnit 4Rohit GhulanavarNo ratings yet
- MechCS - 17-18TE Sem IDocument114 pagesMechCS - 17-18TE Sem IRohit GhulanavarNo ratings yet
- Unit No.4-Cam: Presented By-Jitendra BhatDocument12 pagesUnit No.4-Cam: Presented By-Jitendra BhatRohit GhulanavarNo ratings yet
- Subject - Machine Design - : Topic - Helical GearDocument12 pagesSubject - Machine Design - : Topic - Helical GearRohit GhulanavarNo ratings yet
- Unit 2Document2 pagesUnit 2Rohit GhulanavarNo ratings yet
- Unit 5Document3 pagesUnit 5Rohit GhulanavarNo ratings yet
- Subject - Machine Design - : Topic - Worm GearsDocument28 pagesSubject - Machine Design - : Topic - Worm GearsRohit GhulanavarNo ratings yet
- Unit 3Document2 pagesUnit 3Rohit GhulanavarNo ratings yet
- Subject - Machine Design - : Topic - Spur GearDocument10 pagesSubject - Machine Design - : Topic - Spur GearRohit GhulanavarNo ratings yet
- Helical Gear - Force Analysis of Helical GearDocument12 pagesHelical Gear - Force Analysis of Helical GearRohit GhulanavarNo ratings yet
- Unit II-Project Identification, Selection, PlanningDocument76 pagesUnit II-Project Identification, Selection, PlanningRohit GhulanavarNo ratings yet
- Bearings - Rolling Contact BearingsDocument34 pagesBearings - Rolling Contact BearingsRohit GhulanavarNo ratings yet
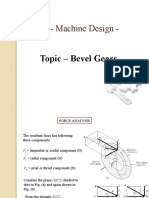
- Bevel Gear - Force Analysis of Bevel GearDocument16 pagesBevel Gear - Force Analysis of Bevel GearRohit GhulanavarNo ratings yet
- Advanced Machining ProcessDocument13 pagesAdvanced Machining ProcessRohit GhulanavarNo ratings yet
- Milling Machine MCQDocument4 pagesMilling Machine MCQRohit Ghulanavar50% (2)
- Unit 3 CNC Machine Tools: StructureDocument17 pagesUnit 3 CNC Machine Tools: StructureRohit GhulanavarNo ratings yet
- Bearing ProblemsDocument16 pagesBearing ProblemsRohit GhulanavarNo ratings yet
- Shaper & Planner MCQDocument2 pagesShaper & Planner MCQRohit Ghulanavar100% (2)
- Grinding Machine All PDFDocument90 pagesGrinding Machine All PDFRohit Ghulanavar100% (2)
- Non Traditional Machining MCQDocument3 pagesNon Traditional Machining MCQRohit Ghulanavar79% (14)
- Machine Tool Prob.Document2 pagesMachine Tool Prob.Rohit GhulanavarNo ratings yet
- Boring MachineDocument49 pagesBoring MachineRohit Ghulanavar100% (3)
- Lathe, Capsten Turret, Drilling, Boaring PDFDocument239 pagesLathe, Capsten Turret, Drilling, Boaring PDFRohit GhulanavarNo ratings yet
- Grinding & Grinding WheelDocument28 pagesGrinding & Grinding WheelRohit GhulanavarNo ratings yet
- BurnishingDocument7 pagesBurnishingRohit GhulanavarNo ratings yet
- Machine Tools Questions and Answers - GrindingDocument4 pagesMachine Tools Questions and Answers - GrindingRohit GhulanavarNo ratings yet
- ROBOTICSDocument99 pagesROBOTICSRutuja ParabNo ratings yet
- 6 Mobility of Mechanisms A Critical Review-Grigore GoguDocument30 pages6 Mobility of Mechanisms A Critical Review-Grigore GoguAlin Florescu100% (1)
- RMVS Unit - IDocument77 pagesRMVS Unit - IBarani Kumar SNo ratings yet
- Stability and Indeterminacy100Document6 pagesStability and Indeterminacy100Sarah SullivanNo ratings yet
- 39 MeisingerDocument11 pages39 MeisingerBaru SomisettyNo ratings yet
- 3DRefer Risa3dDocument168 pages3DRefer Risa3dsherwin827No ratings yet
- Take Home Quiz Sample Answer Part ADocument26 pagesTake Home Quiz Sample Answer Part AMuhammed I'zwanNo ratings yet
- A New Approach To The Design of A DELTA Robot by New UserDocument2 pagesA New Approach To The Design of A DELTA Robot by New UserArif AbbasiNo ratings yet
- NX TutorialsDocument25 pagesNX TutorialsMahantesh KanamadiNo ratings yet
- Sparks Academy Student - Test Series Result Tom 1Document14 pagesSparks Academy Student - Test Series Result Tom 1KanagarajanNo ratings yet
- (Applicable From The Academic Session 2018-2019) : Syllabus For B. Tech in Computer Science & EngineeringDocument22 pages(Applicable From The Academic Session 2018-2019) : Syllabus For B. Tech in Computer Science & EngineeringAdhara MukherjeeNo ratings yet
- Six Axis Articlated Robotic Arm 2nd PresentationDocument17 pagesSix Axis Articlated Robotic Arm 2nd PresentationGunjan BhayaniNo ratings yet
- Kinematics - WikipediaDocument19 pagesKinematics - Wikipediakirthi83No ratings yet
- Structural Engg. Lecture 3Document20 pagesStructural Engg. Lecture 3Mr. Danish SaeedNo ratings yet
- Week 12 - Project 2 - Piston Mechanical Event SimulationDocument20 pagesWeek 12 - Project 2 - Piston Mechanical Event SimulationRogério Vilella JunqueiraNo ratings yet
- User Manual Matlab Simmechanics 3 eDocument14 pagesUser Manual Matlab Simmechanics 3 eTanNguyễnNo ratings yet
- Tekla Structure Analysis - TutorialDocument86 pagesTekla Structure Analysis - TutorialAG86BMA100% (2)
- Explicit ImplicitDocument12 pagesExplicit ImplicitSavalia HardikNo ratings yet
- Kinematics: Forward and Inverse Kinematics: Kinematic ChainsDocument47 pagesKinematics: Forward and Inverse Kinematics: Kinematic Chainsyuvaraaj aletiNo ratings yet
- Signature RedactedDocument99 pagesSignature RedactedGoran ZezeljNo ratings yet
- Robots in Radioactive EnvironmentsDocument21 pagesRobots in Radioactive EnvironmentsMohimina Jawariyah67% (3)
- Robotics Reviewer For ElectronicsDocument16 pagesRobotics Reviewer For ElectronicsJohnval Reval Cariaga0% (1)
- ASTROS Theoretical Manual PDFDocument234 pagesASTROS Theoretical Manual PDFrobcfuNo ratings yet
- Introduction: Mechanisms and MachinesDocument5 pagesIntroduction: Mechanisms and Machineschala nigussieNo ratings yet
- Equations of Motion For A Single Degree-Of-Freedom SystemDocument42 pagesEquations of Motion For A Single Degree-Of-Freedom SystemFernanda LagoNo ratings yet
- Prash Robotics UpdatedDocument152 pagesPrash Robotics Updatedpreethu02No ratings yet
- RoboticsDocument394 pagesRoboticsPeter Nomikos100% (5)
- Mechanical Design Animation TutorialDocument16 pagesMechanical Design Animation TutorialAnonymous pMVR77x1No ratings yet