You might also like
- Business Analyst SampleDocument2 pagesBusiness Analyst SampleAbha SaxenaNo ratings yet
- Chapter 4Document60 pagesChapter 4Vince Dominich MadroneroNo ratings yet
- Din en 10242Document34 pagesDin en 10242hasan_676489616100% (3)
- Draft Guidelines For Green Rating of HighwaysG-3 PDFDocument37 pagesDraft Guidelines For Green Rating of HighwaysG-3 PDFDwijendra ChanumoluNo ratings yet
- Direct - Current Motor Characteristics and ApplicationsDocument58 pagesDirect - Current Motor Characteristics and ApplicationsMaman SomantriNo ratings yet
- Speed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument73 pagesSpeed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- Electrical Machines-I IIIDocument55 pagesElectrical Machines-I IIIadityassripadaNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Final Control ElementsDocument76 pagesFinal Control ElementsUtkarsh ModiNo ratings yet
- Steady-State Analysis of DC MotorsDocument24 pagesSteady-State Analysis of DC MotorsUsama RaoNo ratings yet
- Chp5 DC Motor DrivesDocument38 pagesChp5 DC Motor Drivesblaze emberNo ratings yet
- Induction Motor (Asynchronous Motor) : Electrical MachinesDocument41 pagesInduction Motor (Asynchronous Motor) : Electrical MachinesNAITIKNo ratings yet
- DC MotorsDocument39 pagesDC Motorsapi-3827132100% (11)
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- Class DutyDocument58 pagesClass DutyHarsha AnantwarNo ratings yet
- DC MachinesDocument19 pagesDC MachinesMoses MberwaNo ratings yet
- Chapter 5Document86 pagesChapter 5Selva SamNo ratings yet
- Lectures Synchronous MachinesDocument47 pagesLectures Synchronous MachinesSaddy Cool100% (1)
- DC MotorDocument38 pagesDC MotorasuypowerNo ratings yet
- Auto Transformer Energy Conversion 6Document38 pagesAuto Transformer Energy Conversion 6Katari Sreenu100% (1)
- Chapter 3 Three Phase Induction MotorDocument46 pagesChapter 3 Three Phase Induction MotorShikoyeniNo ratings yet
- DC DriveDocument36 pagesDC DriveferdiNo ratings yet
- Chapter 5Document86 pagesChapter 5sapnarauthanNo ratings yet
- DC Motor: Dr. Mohammed Moshiul HoqueDocument43 pagesDC Motor: Dr. Mohammed Moshiul Hoquesagar378No ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- Chapter 1 DC Drives Part1Document46 pagesChapter 1 DC Drives Part1Mohammad MunzirNo ratings yet
- Synchronous MachineDocument45 pagesSynchronous Machinen02219827hNo ratings yet
- DC MotorDocument47 pagesDC MotorArun SaraswathyNo ratings yet
- Part 2 (DC MOTOR CONTROL)Document45 pagesPart 2 (DC MOTOR CONTROL)Jimmy Tan100% (1)
- Chapter 4Document24 pagesChapter 4javeria zafeerNo ratings yet
- Modified (N+L) Switch Converter For Switched Reluctance Motor DrivesDocument7 pagesModified (N+L) Switch Converter For Switched Reluctance Motor DrivesDeepak RonankiNo ratings yet
- Chapter7 - Single Phase MotorDocument10 pagesChapter7 - Single Phase MotorMohd Jamal Mohd MoktarNo ratings yet
- Coach AlternatorDocument38 pagesCoach AlternatorDee TrdNo ratings yet
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- Basics of A Electric Motor: Dcmotor 1Document47 pagesBasics of A Electric Motor: Dcmotor 1selraj0708No ratings yet
- Chapter 2 Synchronous MachinesDocument53 pagesChapter 2 Synchronous Machinesayumail100% (1)
- Wound Rotor Induction Generators (Wrigs) : Steady State: Magnetic Cores Windings and Their Mmfs Slip-Rings and BrushesDocument36 pagesWound Rotor Induction Generators (Wrigs) : Steady State: Magnetic Cores Windings and Their Mmfs Slip-Rings and BrushesKiyamatur RahamanNo ratings yet
- Single Phase Series MotorDocument35 pagesSingle Phase Series MotorKedar KanaseNo ratings yet
- Lecture Notes Elec A6: Induction MachinesDocument39 pagesLecture Notes Elec A6: Induction MachinesRam PrasadNo ratings yet
- Module Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeDocument30 pagesModule Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeOmar DjazzoNo ratings yet
- Power Systems AssignmentDocument12 pagesPower Systems AssignmentJbmulindwaNo ratings yet
- Energy Conversion One: Chapter NineDocument29 pagesEnergy Conversion One: Chapter NinejennybunnyomgNo ratings yet
- Module3 - Induction MotorDocument45 pagesModule3 - Induction MotorRevki 'Exiit'No ratings yet
- Electric Motors: - Classification / TypesDocument30 pagesElectric Motors: - Classification / Typesgopi_905No ratings yet
- Induction Motors PDFDocument108 pagesInduction Motors PDFKshitij ShrivastavaNo ratings yet
- Ee 316 - Electrical Machines 1 Week 9: E Kϕn ↓ I V E ↓ R T Kϕ I ↑Document7 pagesEe 316 - Electrical Machines 1 Week 9: E Kϕn ↓ I V E ↓ R T Kϕ I ↑Laurence Abrogena AlmazanNo ratings yet
- VD SeriesDocument4 pagesVD SeriesintrudentalertNo ratings yet
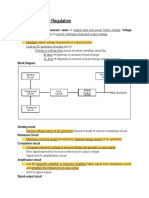
- Module 11: Voltage RegulatorsDocument4 pagesModule 11: Voltage RegulatorsChristian AganoNo ratings yet
- Electrical Machines Lab: Experiment 2ADocument9 pagesElectrical Machines Lab: Experiment 2AARTI RAWATNo ratings yet
- DC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesDocument34 pagesDC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesMohammed- KannanNo ratings yet
- Motor DrivesDocument61 pagesMotor DrivesSatesh NairNo ratings yet
- Lecture Synchronous Machines PPPTDocument48 pagesLecture Synchronous Machines PPPTMehtab AhmedNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Fluid Mechanics: Pressure Distribution in A FluidDocument28 pagesFluid Mechanics: Pressure Distribution in A FluidrishanshawkatNo ratings yet
- Fluid Mechanics: Chapter 1 IntroductionDocument21 pagesFluid Mechanics: Chapter 1 IntroductionrishanshawkatNo ratings yet
- Introductory Sociology Fact SheetDocument3 pagesIntroductory Sociology Fact Sheetrishanshawkat100% (1)
- How Differential Gears Are ManufacturedDocument4 pagesHow Differential Gears Are ManufacturedrishanshawkatNo ratings yet
- SQRT Atan: Function Global G - CM K - CM M y - Pivot - Location String - Length CDocument1 pageSQRT Atan: Function Global G - CM K - CM M y - Pivot - Location String - Length CrishanshawkatNo ratings yet
- Bernoulli and The Free JetDocument3 pagesBernoulli and The Free JetrishanshawkatNo ratings yet
- Homework 02Document5 pagesHomework 02rishanshawkat0% (1)
- MA 235 (2.4 Exact Equations)Document12 pagesMA 235 (2.4 Exact Equations)rishanshawkatNo ratings yet
- Ability To Create Manual OSP Purchase RequisitionsDocument2 pagesAbility To Create Manual OSP Purchase RequisitionsRahul JainNo ratings yet
- Managing The ESL ClassroomDocument36 pagesManaging The ESL ClassroomJoelynn KhooNo ratings yet
- Practice 1Document3 pagesPractice 1Kalpana ChaudharyNo ratings yet
- اثر التخطيط الأستراتيجي دراسة الشيخلي الاردن1Document184 pagesاثر التخطيط الأستراتيجي دراسة الشيخلي الاردن1ISMAIl ALSHAMINo ratings yet
- Function SpellNumberDocument2 pagesFunction SpellNumberBalasubramaniam ElangovanNo ratings yet
- List of Staff In-Charge For NBADocument1 pageList of Staff In-Charge For NBADurai Tamilarasu KarnaNo ratings yet
- A FSK Radar With Frequency-Scanned Array For Moving and Stationary Human Subjects DetectionDocument5 pagesA FSK Radar With Frequency-Scanned Array For Moving and Stationary Human Subjects DetectionYee Kit ChanNo ratings yet
- Figuration and The Sublime Logic of The Real: Jameson's Libidinal ApparatusesDocument28 pagesFiguration and The Sublime Logic of The Real: Jameson's Libidinal ApparatusesGabriel HartleyNo ratings yet
- Cenik Vyrobce 2020 EURDocument16 pagesCenik Vyrobce 2020 EURszystNo ratings yet
- Haircut and Dresscode PolicyDocument1 pageHaircut and Dresscode PolicyGianne FigueroaNo ratings yet
- Test Bank For Methods in Behavioral Research 12Th Edition Cozby Bates 0077861892 9780077861896 Full Chapter PDFDocument36 pagesTest Bank For Methods in Behavioral Research 12Th Edition Cozby Bates 0077861892 9780077861896 Full Chapter PDFpauline.ganley829100% (12)
- Module 2Document5 pagesModule 2Emmarie LlantinoNo ratings yet
- CheatDocument1 pageCheatPenda JoseNo ratings yet
- 06 June 2012Document85 pages06 June 2012AMTOJ SINGHNo ratings yet
- Common CV Format 03 - Ox2q8dWAaIEy6CADocument2 pagesCommon CV Format 03 - Ox2q8dWAaIEy6CATurJo KhanNo ratings yet
- Tugas Membrane - PGBDocument17 pagesTugas Membrane - PGBRika Budi NoviawatiNo ratings yet
- Bobcat S150 Series - Operation Maintenance Parts ManualDocument545 pagesBobcat S150 Series - Operation Maintenance Parts ManualMarco Aurélio100% (2)
- Dimensional AnalysisDocument36 pagesDimensional Analysisadeogun kehindeNo ratings yet
- Timing Belt Replacement 2HDIDocument5 pagesTiming Belt Replacement 2HDIwicka3No ratings yet
- Iit Hybrid ScheduleDocument3 pagesIit Hybrid ScheduleAdithyan CANo ratings yet
- Literature Review Roles of EcommerceDocument8 pagesLiterature Review Roles of EcommerceSan Htet AungNo ratings yet
- WashMaster Classic ENDocument4 pagesWashMaster Classic ENBiomedicaNo ratings yet
- Safety Performance MeasurementDocument5 pagesSafety Performance Measurementtnsv22No ratings yet
- Case of Antovic and Mirkovic v. MontenegroDocument23 pagesCase of Antovic and Mirkovic v. MontenegroMarisol SalasNo ratings yet
- Struggles of Senior Highschool Students With Ofw ParentsDocument5 pagesStruggles of Senior Highschool Students With Ofw ParentsNezerie Noah100% (1)
- 21BL312 W-2021-033 - 6000x2500x30 - S355J2+N (PP26647002) 54928-1 - 2Document2 pages21BL312 W-2021-033 - 6000x2500x30 - S355J2+N (PP26647002) 54928-1 - 2johnnyNo ratings yet
- An Introduction To Strategic CommunicationDocument9 pagesAn Introduction To Strategic Communicationscrane@100% (1)