You might also like
- EEE6209 Advanced Digital Signal Processing (ADSP) : DR Charith Abhayaratne (CA)Document24 pagesEEE6209 Advanced Digital Signal Processing (ADSP) : DR Charith Abhayaratne (CA)dialauchennaNo ratings yet
- MHF 4U Rational Functions Test 15 ADocument18 pagesMHF 4U Rational Functions Test 15 AAarish Panjwani100% (3)
- Discrete Time SignalDocument11 pagesDiscrete Time Signaldheerajdb99No ratings yet
- Lecture 3 DSP Discrete-Time Signals and SystemsDocument11 pagesLecture 3 DSP Discrete-Time Signals and SystemsManish PadhraNo ratings yet
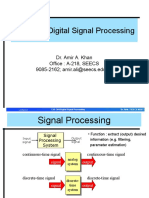
- CSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkDocument22 pagesCSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkAlamgir Ahmad KhattakNo ratings yet
- Discrete - Time Systems Discrete - Time Systems: ExamplesDocument17 pagesDiscrete - Time Systems Discrete - Time Systems: ExamplesSandhya SandyNo ratings yet
- Signals & SystemsDocument55 pagesSignals & SystemsWaqas Akram GondalNo ratings yet
- DTSDocument17 pagesDTSSabu GeorgeNo ratings yet
- Chapter 3 Difference EquationDocument33 pagesChapter 3 Difference EquationMaga LakshmiNo ratings yet
- Discrete-Time Signal & SystemDocument20 pagesDiscrete-Time Signal & SystemismailNo ratings yet
- CH 1 PDFDocument43 pagesCH 1 PDFVimala ElumalaiNo ratings yet
- Tutorial 1Document8 pagesTutorial 1Carine ChiaNo ratings yet
- Discrete-Time Signals and SystemsDocument111 pagesDiscrete-Time Signals and SystemsharivarahiNo ratings yet
- Digital Signal ProcessingDocument54 pagesDigital Signal Processingshivam vashistNo ratings yet
- Lecture 7Document42 pagesLecture 7Andika Dwi RubyantoroNo ratings yet
- Discrete-Time Signals and SystemsDocument111 pagesDiscrete-Time Signals and Systemsduraivel_anNo ratings yet
- Lecture1 2upDocument11 pagesLecture1 2updewddudeNo ratings yet
- Signal Processing (신호처리특론) : Discrete-time signalsDocument12 pagesSignal Processing (신호처리특론) : Discrete-time signalsLe Viet HaNo ratings yet
- EPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityDocument58 pagesEPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityTan Yong LiangNo ratings yet
- Signals and Systems (SKEE 2073) Lecture #5: Topics CoveredDocument10 pagesSignals and Systems (SKEE 2073) Lecture #5: Topics Coveredefun94No ratings yet
- Digital Signal Processing Eng'r Rianne Arne S. ReyesDocument48 pagesDigital Signal Processing Eng'r Rianne Arne S. Reyescold keyboardNo ratings yet
- Introduction To Discrete Time Systems and The Z TransformDocument93 pagesIntroduction To Discrete Time Systems and The Z TransformRaufzha AnandaNo ratings yet
- Chapter - 5 - Part2 - DT Signals & SystemsDocument51 pagesChapter - 5 - Part2 - DT Signals & SystemsReddy BabuNo ratings yet
- TC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Document58 pagesTC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Sadaf AyeshaNo ratings yet
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinIr Wn IkaarinaNo ratings yet
- Signals & SystemsDocument29 pagesSignals & SystemsFrancy RaniNo ratings yet
- Unit I Classification of Signals & SystemsDocument52 pagesUnit I Classification of Signals & SystemsSekar GanapathyNo ratings yet
- Signals and SystemsDocument40 pagesSignals and Systemsosama_tahir_3No ratings yet
- ECTE301 Notes Week1Document52 pagesECTE301 Notes Week1sreddybabuNo ratings yet
- Generalized Performance Characteristics of Instruments: Instructor: DR Alivelu M ParimiDocument14 pagesGeneralized Performance Characteristics of Instruments: Instructor: DR Alivelu M ParimiSaketh DahagamNo ratings yet
- CH 05Document31 pagesCH 05KavunNo ratings yet
- Digital Signal Processing Lecture+5,+January+20thDocument36 pagesDigital Signal Processing Lecture+5,+January+20thGASR2017No ratings yet
- Basic System PropertiesDocument8 pagesBasic System PropertiesGurusreenuNo ratings yet
- EEE223 Signals & SystemsDocument18 pagesEEE223 Signals & SystemsMuhammad Usman GhaniNo ratings yet
- Praktikum Metode Analisis Geofisika: Pertemuan 02 - Continuous System and Time Domain System AnalysisDocument25 pagesPraktikum Metode Analisis Geofisika: Pertemuan 02 - Continuous System and Time Domain System AnalysisEKO PEBRIAN SILALAHINo ratings yet
- Review of Discrete-Time SystemsDocument27 pagesReview of Discrete-Time SystemsShruti KumariNo ratings yet
- Chapter 2 - Discrete Time Signals and SystemsDocument81 pagesChapter 2 - Discrete Time Signals and Systemsdvishwakarma1796No ratings yet
- ELCE301 Lecture5 (LTIsystems Time2)Document31 pagesELCE301 Lecture5 (LTIsystems Time2)Little VoiceNo ratings yet
- MATLAB and Its Control ToolboxDocument41 pagesMATLAB and Its Control ToolboxzkqasimNo ratings yet
- Discrete Time Signals&systemsDocument24 pagesDiscrete Time Signals&systemsRogers Rodri ShayoNo ratings yet
- 6.003: Signals and Systems: ConvolutionDocument76 pages6.003: Signals and Systems: ConvolutionHasan RahmanNo ratings yet
- Signal & Linear System: Basil HamedDocument63 pagesSignal & Linear System: Basil Hamedkhaled jNo ratings yet
- Lec 3Document13 pagesLec 3Saif ShubbarNo ratings yet
- Fourier Analysis of Signals and SystemsDocument24 pagesFourier Analysis of Signals and SystemsBabul IslamNo ratings yet
- Time, Frequency Analysis of SignalsDocument78 pagesTime, Frequency Analysis of SignalsstephanNo ratings yet
- Classification of SystemsDocument20 pagesClassification of SystemsGuhanNo ratings yet
- Numerical Evaluation of Dynamic ResponseDocument47 pagesNumerical Evaluation of Dynamic ResponseDavid SantiagoNo ratings yet
- 2019.02.04 L06 S&S Systems PropertiesDocument24 pages2019.02.04 L06 S&S Systems PropertiesbilalNo ratings yet
- ConvolutionDocument32 pagesConvolutionGirijesh Kumar100% (2)
- DSP2 3Document29 pagesDSP2 3udz76852No ratings yet
- Kalman SmoothingDocument15 pagesKalman SmoothingMarisela BarnesNo ratings yet
- Course Notes Advanced DSPDocument122 pagesCourse Notes Advanced DSPAnonymous hDKqasfNo ratings yet
- Digital Signal Processing: Course OutlineDocument52 pagesDigital Signal Processing: Course OutlinefikretNo ratings yet
- Equalization Ed Us atDocument50 pagesEqualization Ed Us atIgnatious MohanNo ratings yet
- Continuous-Time & Discrete-Time Systems.: - Physical Systems Are Interconnection ofDocument22 pagesContinuous-Time & Discrete-Time Systems.: - Physical Systems Are Interconnection ofvai amiNo ratings yet
- EEE223 Lec5 HandoutsDocument4 pagesEEE223 Lec5 HandoutsFarhan Khan NiaZiNo ratings yet
- Exam ReviewDocument13 pagesExam ReviewSk A S M Monirul IslamNo ratings yet
- S&S - Week 5Document38 pagesS&S - Week 5machasong98No ratings yet
- Multi Rate DSPDocument41 pagesMulti Rate DSPrekhakasiraman100% (2)
- Experiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingDocument14 pagesExperiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingMirza Riyasat AliNo ratings yet
- Linear Systems and MatricesDocument49 pagesLinear Systems and MatricesHasan Ali ErginNo ratings yet
- How To Solve Age Problems Part 1: The Number Word Problem SeriesDocument4 pagesHow To Solve Age Problems Part 1: The Number Word Problem SeriesCarlson E. AberinNo ratings yet
- ACMS 40390: Fall 2010: Zxu2@nd - EduDocument2 pagesACMS 40390: Fall 2010: Zxu2@nd - EduChiOfGreeNo ratings yet
- Aitchison Admissions Guide 2020 21 PDFDocument19 pagesAitchison Admissions Guide 2020 21 PDFbilalahmed78No ratings yet
- AUTOMATADocument61 pagesAUTOMATAeuchet yusufNo ratings yet
- Johnsons Algorithm Brilliant Math Amp Science WikiDocument6 pagesJohnsons Algorithm Brilliant Math Amp Science WikiClaude EckelNo ratings yet
- Digital Signal Processing Soma Biswas 2017Document19 pagesDigital Signal Processing Soma Biswas 2017Bkm Mizanur RahmanNo ratings yet
- Notes Chapter 8Document26 pagesNotes Chapter 8awa_caemNo ratings yet
- Datamining K-MeansDocument25 pagesDatamining K-MeanssniperNo ratings yet
- The Use Quasi Comparison Functions With Rayleigh Ritz Method Beam PDFDocument7 pagesThe Use Quasi Comparison Functions With Rayleigh Ritz Method Beam PDFGabriel Ferrario100% (1)
- D. Inverse Trigonometric Functions: One-To-One OntoDocument69 pagesD. Inverse Trigonometric Functions: One-To-One Ontoabdullah naseerNo ratings yet
- Solving Optimal Power Flow With Voltage Constraints Using Matlab Optimization ToolboxDocument55 pagesSolving Optimal Power Flow With Voltage Constraints Using Matlab Optimization Toolboxhanytheking50% (2)
- Methods of Solving Quadratic Equations: FreebieDocument8 pagesMethods of Solving Quadratic Equations: FreebieSabrina LavegaNo ratings yet
- L-1 - Indefinite Integration PDFDocument36 pagesL-1 - Indefinite Integration PDFSubham SharmaNo ratings yet
- Detailed Lesson Plan in Teaching of Arts 1 - BugtongDocument5 pagesDetailed Lesson Plan in Teaching of Arts 1 - BugtongMichael Oligary S. BugtongNo ratings yet
- 20mhg01 Functions of Several VariablesDocument74 pages20mhg01 Functions of Several VariablesPradeepNo ratings yet
- SETS All WoksheetsDocument6 pagesSETS All WoksheetsSelver SadikovicNo ratings yet
- Jee Free Bansal Classes Test SeriesDocument2 pagesJee Free Bansal Classes Test SeriesVicky KumarNo ratings yet
- Writing Linear Equations-Slope-Intercept FormDocument5 pagesWriting Linear Equations-Slope-Intercept FormCheesyWasTakenNo ratings yet
- Digital Signal Processing by John G. Pro Part2Document3 pagesDigital Signal Processing by John G. Pro Part2Hasan Al BannaNo ratings yet
- Abstract Data TypeDocument5 pagesAbstract Data TypeNamal No OorNo ratings yet
- 02 Topically P3 A4 M10Document43 pages02 Topically P3 A4 M10Ir HeriawanNo ratings yet
- Demonstration of Goldbach's ConjectureDocument6 pagesDemonstration of Goldbach's ConjectureIdriss Olivier BadoNo ratings yet
- 3-1 Physical Classification 3-2 Mathematical Classification 3-3 The Well-Posed Problem 3-4 The Ill-Posed ProblemDocument19 pages3-1 Physical Classification 3-2 Mathematical Classification 3-3 The Well-Posed Problem 3-4 The Ill-Posed ProblemDiana BarchukNo ratings yet
- Jung Nickel 92Document4 pagesJung Nickel 92MathmathNo ratings yet
- Quadratic EquationDocument35 pagesQuadratic EquationTimothy De GuzmanNo ratings yet
- Venema Ch. 1 and 2 - Lectures 1 - 4Document25 pagesVenema Ch. 1 and 2 - Lectures 1 - 4DwiAnggunBissabriNo ratings yet
- Eengineering Mathematics: (For ESE & GATE Exam) (Ce, Me, Pi, CH, Ec, Ee, In, CS, It)Document19 pagesEengineering Mathematics: (For ESE & GATE Exam) (Ce, Me, Pi, CH, Ec, Ee, In, CS, It)DaanyalNo ratings yet