You might also like
- IT Infrastructure and Network TechDocument2 pagesIT Infrastructure and Network TechMidnight ProgrammingNo ratings yet
- Ece 3-2 Cs Syllabus - Ug - r20Document113 pagesEce 3-2 Cs Syllabus - Ug - r20Jøhn WeßłeyNo ratings yet
- Ece 3-1 Cs Syllabus - Ug - r20Document110 pagesEce 3-1 Cs Syllabus - Ug - r20Lusy LightNo ratings yet
- AJP MicroprojectDocument10 pagesAJP MicroprojectshubhaM100% (1)
- Sensors & Its Applications (AEC 0304)Document161 pagesSensors & Its Applications (AEC 0304)WowskinNo ratings yet
- Responsive Travel Agency: SVPM'S Institute of Technology and Engg. Malegaonbk, (2020-2021)Document50 pagesResponsive Travel Agency: SVPM'S Institute of Technology and Engg. Malegaonbk, (2020-2021)Suyash MusaleNo ratings yet
- Week 1 - Iot - Assignment 1 - AnsDocument3 pagesWeek 1 - Iot - Assignment 1 - Ansdude RohitNo ratings yet
- SH As Hi 1Document30 pagesSH As Hi 1Shashi BalaNo ratings yet
- Mirpur University of Science and Technology (MUST), Mirpur-10250 (AJK), PakistanDocument3 pagesMirpur University of Science and Technology (MUST), Mirpur-10250 (AJK), PakistanCH HamzaNo ratings yet
- Course Code: 4361103: Page 1 of 8Document8 pagesCourse Code: 4361103: Page 1 of 8rashmin tannaNo ratings yet
- Class Schedule 20151-16 (Sem-1)Document2 pagesClass Schedule 20151-16 (Sem-1)yo23209684No ratings yet
- Laboratory Manual 2021-2022: Digital Signal Processing LaboratoryDocument77 pagesLaboratory Manual 2021-2022: Digital Signal Processing LaboratorySanket AmbadagattiNo ratings yet
- Project Status Report - COM - Oct2021Document5 pagesProject Status Report - COM - Oct2021Parasaram SrinivasNo ratings yet
- ECE Syllabus July-Dec 2017Document159 pagesECE Syllabus July-Dec 2017The FZ25 BoyNo ratings yet
- Final CPP MrunalDocument72 pagesFinal CPP Mrunal04-SYCO- Manali Ghule.No ratings yet
- Jira Xray Test ExecutionsDocument8 pagesJira Xray Test ExecutionsEdward Lawin GuzmanNo ratings yet
- IV B.Tech TT I Sem 2021-22Document6 pagesIV B.Tech TT I Sem 2021-22ravikumar rayalaNo ratings yet
- Iot Based Transformer Monitoring System: Savitribai Phule Pune UniversityDocument69 pagesIot Based Transformer Monitoring System: Savitribai Phule Pune UniversityyashNo ratings yet
- CSE BTECH IV SEM SCHEME SYLLABUS - Jan 2022Document16 pagesCSE BTECH IV SEM SCHEME SYLLABUS - Jan 2022Aditya ChouhanNo ratings yet
- Mobile Computing and Networks IT BRanchDocument10 pagesMobile Computing and Networks IT BRanchNihar ChaudhariNo ratings yet
- ETI MicroprojectDocument17 pagesETI Microproject13432Tejaswi Kale.No ratings yet
- Elements of Computer Science EngineeringDocument2 pagesElements of Computer Science EngineeringSrinivas KanakalaNo ratings yet
- Guidelines For Sem VIII Choice R16 Regular ExaminationDocument5 pagesGuidelines For Sem VIII Choice R16 Regular ExaminationJvc NfuNo ratings yet
- Computer NetworksDocument6 pagesComputer Networksutubeyash05No ratings yet
- Project Status Report - COM - Jan2022Document4 pagesProject Status Report - COM - Jan2022Parasaram SrinivasNo ratings yet
- Engineering Excellence For Your Business 22 February 2018, Athens GreeceDocument49 pagesEngineering Excellence For Your Business 22 February 2018, Athens GreeceSPYROS KALOGERASNo ratings yet
- Epl Manual PDFDocument27 pagesEpl Manual PDFAnisha SelvamNo ratings yet
- NC Electronic Eng. Instrumentation and Control Modules 2022Document178 pagesNC Electronic Eng. Instrumentation and Control Modules 2022nhodoaliNo ratings yet
- Cse Iot Btech III Yr V Sem Scheme SyllabusDocument28 pagesCse Iot Btech III Yr V Sem Scheme SyllabusVed Kumar GuptaNo ratings yet
- 15ecsc702 576 Kle50-15ecsc702Document5 pages15ecsc702 576 Kle50-15ecsc702Aniket AmbekarNo ratings yet
- 05.M.Tech .RemoteDocument37 pages05.M.Tech .RemoteAnonymous fYHyRa2XNo ratings yet
- Project Status Report - COM - Nov2021Document7 pagesProject Status Report - COM - Nov2021Parasaram SrinivasNo ratings yet
- NC Electronic Eng. Instrumentation and Control Modules 2022Document174 pagesNC Electronic Eng. Instrumentation and Control Modules 2022Kudzy ChigodoraNo ratings yet
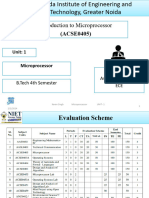
- Introduction To Microprocessor: (ACSE0405)Document167 pagesIntroduction To Microprocessor: (ACSE0405)ragoho4677No ratings yet
- Minor in IoT Scheme 20Document10 pagesMinor in IoT Scheme 20Naveen KumarNo ratings yet
- Faculty of Engineering Ain Shams University Final ExaminationDocument9 pagesFaculty of Engineering Ain Shams University Final ExaminationRitaNo ratings yet
- EE220L DLD Lab Manual Fall 2022Document104 pagesEE220L DLD Lab Manual Fall 2022Shoaib MushtaqNo ratings yet
- Ete Learning MaterialDocument164 pagesEte Learning MaterialgpkpaperNo ratings yet
- Semester-IV: Computer Networking Course Code: 4340703Document10 pagesSemester-IV: Computer Networking Course Code: 4340703Zaidali BurmawalaNo ratings yet
- Priti Kadam Dte ProjectDocument15 pagesPriti Kadam Dte ProjectAk MarathiNo ratings yet
- Sample Paper 3Document13 pagesSample Paper 3Snapi LifestyleNo ratings yet
- ECE 4-1 CS Syllabus - UG - R20Document110 pagesECE 4-1 CS Syllabus - UG - R20Jimma112No ratings yet
- Gite AnkitaDocument6 pagesGite AnkitaSairaj Net CafeNo ratings yet
- Syllabus V Sem CS DipDocument25 pagesSyllabus V Sem CS DipSK BeharNo ratings yet
- Embedded System & Microcontroller Application Course Code: 4351102Document8 pagesEmbedded System & Microcontroller Application Course Code: 4351102Raggy TannaNo ratings yet
- 2 ProjectDocument108 pages2 ProjectJaneNo ratings yet
- Report 1 DeekshiDocument30 pagesReport 1 DeekshiBhoomika BhuvanNo ratings yet
- Nad SyllabysDocument10 pagesNad Syllabys2160 38 Advait MhalungekarNo ratings yet
- Noting SheetDocument27 pagesNoting Sheet14009No ratings yet
- Shravani GDocument73 pagesShravani G04-SYCO- Manali Ghule.No ratings yet
- DT Worksheet 1.3 21BCS3920Document5 pagesDT Worksheet 1.3 21BCS3920Gaurav saiNo ratings yet
- Nep Sem 1 & 2Document1 pageNep Sem 1 & 2Bala AnandNo ratings yet
- Unit 1Document107 pagesUnit 1Machindra GaikarNo ratings yet
- 0-Internal Viva MCS-CS-ITDocument1 page0-Internal Viva MCS-CS-ITseemabNo ratings yet
- Embedded IndexDocument1 pageEmbedded IndexSameer KohokNo ratings yet
- B.E. Ecs Sem Viii SyllabusDocument66 pagesB.E. Ecs Sem Viii Syllabus8816 Gautam ManuelNo ratings yet
- Chhattisgarh Swami Vivekanand Technical University, BhilaiDocument22 pagesChhattisgarh Swami Vivekanand Technical University, Bhilaibheshram janghelNo ratings yet
- Cse Btech IV Yr Vii Sem Scheme Syllabus July 2022Document25 pagesCse Btech IV Yr Vii Sem Scheme Syllabus July 2022Ved Kumar GuptaNo ratings yet
- Ae ZG633 Course HandoutDocument3 pagesAe ZG633 Course HandoutMAHENDRAN DNo ratings yet
- Complete Year 2022 Current Affairs PDF Jan-Dec Current AffairsDocument163 pagesComplete Year 2022 Current Affairs PDF Jan-Dec Current Affairsmuhammad bilalNo ratings yet
- Airport Security ForcesDocument1 pageAirport Security Forcesmuhammad bilalNo ratings yet
- Satellite Image Classification With Deep LearningDocument7 pagesSatellite Image Classification With Deep Learningmuhammad bilalNo ratings yet
- Calibration of Low-Cost Particle Sensors by Using Machine-Learning MethodDocument5 pagesCalibration of Low-Cost Particle Sensors by Using Machine-Learning Methodmuhammad bilalNo ratings yet
- Modeling and Simulation of Quadcopter Using PID Controller: January 2016Document9 pagesModeling and Simulation of Quadcopter Using PID Controller: January 2016muhammad bilalNo ratings yet
- Head Movement Controlled Electronic WheelchairDocument36 pagesHead Movement Controlled Electronic WheelchairAleo Cris BuizaNo ratings yet
- Implementation of Hand Gesture Recognition System To Aid Deaf-Dumb PeopleDocument15 pagesImplementation of Hand Gesture Recognition System To Aid Deaf-Dumb PeopleSanjay ShelarNo ratings yet
- SV2021112102Document12 pagesSV2021112102pashaNo ratings yet
- Control Mouse Using Hand Gesture and VoiceDocument10 pagesControl Mouse Using Hand Gesture and VoiceIJRASETPublicationsNo ratings yet
- These FinalDocument107 pagesThese FinalAhmed OUADAHINo ratings yet
- A Gesture Based Camera Controlling Method in The 3D Virtual SpaceDocument10 pagesA Gesture Based Camera Controlling Method in The 3D Virtual SpaceStefhanno Rukmana Gunawan AbhiyasaNo ratings yet
- Finger Tracking in Real Time Human Computer InteractionDocument12 pagesFinger Tracking in Real Time Human Computer InteractionJishnu RemeshNo ratings yet
- Black BookDocument76 pagesBlack BookHimanshu Thakkar100% (1)
- Shadow RobotDocument29 pagesShadow Robotteentalksopedia100% (1)
- Gesture Volume ControlDocument10 pagesGesture Volume Controlmohammed faizanNo ratings yet
- Urls TemporalesDocument2 pagesUrls TemporalesGersonNo ratings yet
- Gesture-Based Interaction - Lecture 8 - Next Generation User Interfaces (4018166FNR)Document56 pagesGesture-Based Interaction - Lecture 8 - Next Generation User Interfaces (4018166FNR)Beat SignerNo ratings yet
- Gesture Controlled Mouse and Voice AssistantDocument7 pagesGesture Controlled Mouse and Voice AssistantIJRASETPublicationsNo ratings yet
- SeminarDocument26 pagesSeminarharshitha gNo ratings yet
- Early Detection of Diabetes - Diabetic RetinopathyDocument66 pagesEarly Detection of Diabetes - Diabetic RetinopathyHemant MallahNo ratings yet
- Download textbook Android Studio 3 0 Development Essentials Android 8 Edition Neil Smyth ebook all chapter pdfDocument53 pagesDownload textbook Android Studio 3 0 Development Essentials Android 8 Edition Neil Smyth ebook all chapter pdfmarjorie.paulson577100% (11)
- Hand Gesture Controlled Virtual Mouse Using Artificial Intelligence Ijariie19380Document14 pagesHand Gesture Controlled Virtual Mouse Using Artificial Intelligence Ijariie19380Rr RrNo ratings yet
- Seminar Presentation On Sixth Sense TechnologyDocument33 pagesSeminar Presentation On Sixth Sense TechnologyMeNo ratings yet
- Design and Implementation of Air Mouse Using Accelerometer SensorDocument3 pagesDesign and Implementation of Air Mouse Using Accelerometer SensorKesthara VNo ratings yet
- Mpower Project PDFDocument15 pagesMpower Project PDFsachin singhNo ratings yet
- Home Automation Using Hand GestureDocument19 pagesHome Automation Using Hand GestureChandrashekhar KatagiNo ratings yet
- SixthSense TechnologyDocument21 pagesSixthSense TechnologyNishith LakhlaniNo ratings yet
- A Seminar Report OnDocument19 pagesA Seminar Report OnSowmya KasojuNo ratings yet
- Hand GestureDocument5 pagesHand GestureBunny JainNo ratings yet
- 15.-Drum-Dance-Music-Machine Construction of A Technical PDFDocument6 pages15.-Drum-Dance-Music-Machine Construction of A Technical PDFJuan Pacho NoiseNo ratings yet
- Chapter 6 InterfacesDocument114 pagesChapter 6 InterfacesJerrymaeNo ratings yet
- Research Paper On 6th Sense TechnologyDocument8 pagesResearch Paper On 6th Sense Technologyjhwmemrhf100% (1)
- Paper 11-Gesture Controlled Robot Using Image ProcessingDocument9 pagesPaper 11-Gesture Controlled Robot Using Image ProcessingYash SharmaNo ratings yet
- Real Time Hand Gesture Recognition Using Finger TipsDocument5 pagesReal Time Hand Gesture Recognition Using Finger TipsJapjeet SinghNo ratings yet
- Voice Controlled Wheel ChairDocument6 pagesVoice Controlled Wheel ChairAnish GawandeNo ratings yet