You might also like
- Production Gas Carburising: The Pergamon Materials Engineering Practice SeriesFrom EverandProduction Gas Carburising: The Pergamon Materials Engineering Practice SeriesNo ratings yet
- Designing Parametric Spur Gears With Catia V5Document35 pagesDesigning Parametric Spur Gears With Catia V5GeorgeThorogoodNo ratings yet
- SINUMERIKDocument128 pagesSINUMERIKBassu RazvanNo ratings yet
- Lathe Machine Operations GuideDocument42 pagesLathe Machine Operations GuideMark AlderiteNo ratings yet
- Cad CamDocument53 pagesCad CamM HasanovicNo ratings yet
- ComparatorDocument8 pagesComparatorDr. N. S. Sriram100% (1)
- Chap 4 - Robot KinematicsDocument153 pagesChap 4 - Robot KinematicsMohd Syafiq Umran100% (1)
- Heidenhain TNC122Document70 pagesHeidenhain TNC122Mikica01No ratings yet
- IzvršniDocument68 pagesIzvršniMario KovačevićNo ratings yet
- Realan GasDocument100 pagesRealan Gassedge54No ratings yet
- CNC Milling BasicsDocument10 pagesCNC Milling Basicsjsrplc7952No ratings yet
- 1492Document15 pages1492_Anggyaa_No ratings yet
- .NG Mec 224 Properties of Mat TheoryDocument73 pages.NG Mec 224 Properties of Mat TheoryYusuf taiwoNo ratings yet
- SIR Ivan KnezevicDocument6 pagesSIR Ivan KnezevicsaudinkoNo ratings yet
- Module IV-Milling MachineDocument26 pagesModule IV-Milling MachineNalluriRavindra100% (2)
- GSFC Engineering Drawing Standards ManualDocument128 pagesGSFC Engineering Drawing Standards Manualreader27No ratings yet
- SolidWorks Lesson1 PDFDocument16 pagesSolidWorks Lesson1 PDFJohnny Ibarra SorianoNo ratings yet
- MSRR 6011Document14 pagesMSRR 6011pradellesNo ratings yet
- Design of Machine Elements IDocument8 pagesDesign of Machine Elements Imesab100No ratings yet
- 2010 Center Face Driver CatalogDocument68 pages2010 Center Face Driver CatalogmachineCanNo ratings yet
- Abdul Azwan Abdol ZaharDocument24 pagesAbdul Azwan Abdol ZaharthuongviedamNo ratings yet
- Module 1Document21 pagesModule 1AzizNo ratings yet
- Production Engineering PDFDocument145 pagesProduction Engineering PDFRabinNo ratings yet
- Lecture6 DescriptiveGeometryDocument41 pagesLecture6 DescriptiveGeometryLeigh-ann GarroteNo ratings yet
- BallScrew by THK PDFDocument488 pagesBallScrew by THK PDFarun kiranNo ratings yet
- 15ME202 Manufacturing Technology: Unit - 5 Machine ToolsDocument68 pages15ME202 Manufacturing Technology: Unit - 5 Machine ToolsMouriya0% (1)
- Grinding Process OverviewDocument8 pagesGrinding Process OverviewhainerajaramanNo ratings yet
- Thin Cylinderical ShellsDocument9 pagesThin Cylinderical ShellsYogendra KumarNo ratings yet
- Calculating microscope magnifications and field of viewsDocument7 pagesCalculating microscope magnifications and field of viewsraysklineNo ratings yet
- Computer Aided Machine Drawing Laboratory: Lab ManualDocument31 pagesComputer Aided Machine Drawing Laboratory: Lab ManualGiridharadhayalanNo ratings yet
- Unconventional Metal Forming MethodsDocument16 pagesUnconventional Metal Forming MethodsBrijesh VermaNo ratings yet
- PDFDocument424 pagesPDFaddiNo ratings yet
- Me6411 Manufacturing Technology-II Lab ManualDocument35 pagesMe6411 Manufacturing Technology-II Lab ManualdibyenindusNo ratings yet
- Laser Heat TreatmentDocument8 pagesLaser Heat TreatmentBolat AurelNo ratings yet
- Ch4 Belt Drives-2Document40 pagesCh4 Belt Drives-2Abaziz Mousa OutlawZzNo ratings yet
- CH 21Document45 pagesCH 21Anonymous p0mg44xNo ratings yet
- Proses Manufaktur 1: Sheet Metal WorkingDocument51 pagesProses Manufaktur 1: Sheet Metal WorkingWibisono DNo ratings yet
- TURNING LAB EXPERIMENTDocument12 pagesTURNING LAB EXPERIMENTLuqman HakimNo ratings yet
- CATIA V5 R16 Sketcher Models ManualDocument16 pagesCATIA V5 R16 Sketcher Models ManualyeswanthNo ratings yet
- Parni KotloviDocument708 pagesParni KotloviMinela NedžadNo ratings yet
- AutoCAD Tutor 2011 Support Docs - Chapter 1: Customizing the Quick Access ToolbarDocument122 pagesAutoCAD Tutor 2011 Support Docs - Chapter 1: Customizing the Quick Access ToolbarMandi Masood AsferNo ratings yet
- For More Presentation Go To: Metal Cutting LatheDocument74 pagesFor More Presentation Go To: Metal Cutting Lathebabu319No ratings yet
- MillingDocument54 pagesMillingNelsan PatelNo ratings yet
- Machinapility of MetalDocument10 pagesMachinapility of MetalAnonymous 4onNcl7No ratings yet
- MillingDocument54 pagesMillingVickyVenkataramanNo ratings yet
- Taguchi MethodDocument8 pagesTaguchi MethodLSARAVANAN91No ratings yet
- Brochure PDFDocument7 pagesBrochure PDFDeejaySeth SouzaNo ratings yet
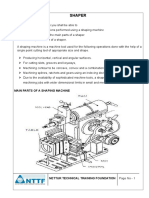
- Shaping Machine GuideDocument25 pagesShaping Machine GuidevinayakNo ratings yet
- Sketchup WinDocument389 pagesSketchup WinTopografia Artur Fidalgo100% (1)
- Mechanics of Metal Cutting 1777Document33 pagesMechanics of Metal Cutting 1777Prabhakara Rao PeekaNo ratings yet
- BE ME 6th Sem Mechanism-Of-metal-cutting Shivam SharmaDocument17 pagesBE ME 6th Sem Mechanism-Of-metal-cutting Shivam SharmaPrabhakara Rao PeekaNo ratings yet
- Manufacturing Engineering II Lecture 4Document45 pagesManufacturing Engineering II Lecture 4Eyu KalebNo ratings yet
- Mechanics of Metal CuttingDocument33 pagesMechanics of Metal CuttingAmmad NadeemNo ratings yet
- Production Engineering I (Meng 3191) : Cutting ForceDocument53 pagesProduction Engineering I (Meng 3191) : Cutting ForceFasil GetachewNo ratings yet
- Lecture 4 Metal Cutting ProcessDocument14 pagesLecture 4 Metal Cutting ProcessDhiraj DhimanNo ratings yet
- Module 3 - Conventional - Machining PDFDocument44 pagesModule 3 - Conventional - Machining PDFKothapalli Venganna ChowdaryNo ratings yet
- Machining Operations & Parameters: TurningDocument58 pagesMachining Operations & Parameters: Turningomar salahNo ratings yet
- Tool GeometryDocument15 pagesTool GeometryShambhavamNo ratings yet
- Metrology Machine Tools Course FileDocument185 pagesMetrology Machine Tools Course FileVenkateshYadavCivarlaNo ratings yet
- RM Important Questions at VenkyDocument15 pagesRM Important Questions at VenkyVenkateshYadavCivarlaNo ratings yet
- CFD NotesDocument64 pagesCFD NotesVenkateshYadavCivarlaNo ratings yet
- What Is Composite MaterialsDocument8 pagesWhat Is Composite MaterialsVenkateshYadavCivarlaNo ratings yet
- Moment of Inertia ExplainedDocument11 pagesMoment of Inertia ExplainedVenkateshYadavCivarlaNo ratings yet
- MMT Objective QuestionsDocument1 pageMMT Objective QuestionsVenkateshYadavCivarlaNo ratings yet
- Fit and TolerancesDocument15 pagesFit and TolerancesRajasekaran Vt100% (1)
- Venky Unit-IVDocument5 pagesVenky Unit-IVVenkateshYadavCivarlaNo ratings yet
- 10.2 Coordinate Measuring MachinesDocument6 pages10.2 Coordinate Measuring MachinesVenkateshYadavCivarlaNo ratings yet
- Designing precision components within tight tolerancesDocument3 pagesDesigning precision components within tight tolerancesVenkateshYadavCivarlaNo ratings yet
- Metrology & Machine ToolsDocument1 pageMetrology & Machine ToolsVenkateshYadavCivarlaNo ratings yet
- Y Sy Ste 2ead: Oo Bo TDocument19 pagesY Sy Ste 2ead: Oo Bo TVenkateshYadavCivarlaNo ratings yet
- Designing precision components within tight tolerancesDocument3 pagesDesigning precision components within tight tolerancesVenkateshYadavCivarlaNo ratings yet
- 10.2 Coordinate Measuring MachinesDocument6 pages10.2 Coordinate Measuring MachinesVenkateshYadavCivarlaNo ratings yet
- Hole and Shaft Basic Sizing System: Fundamental Deviations for Indian Standards IS-919 and BS-4500Document5 pagesHole and Shaft Basic Sizing System: Fundamental Deviations for Indian Standards IS-919 and BS-4500VenkateshYadavCivarlaNo ratings yet
- Elective Age Mbly: &lusoygDocument14 pagesElective Age Mbly: &lusoygVenkateshYadavCivarlaNo ratings yet
- Y Sy Ste 2ead: Oo Bo TDocument19 pagesY Sy Ste 2ead: Oo Bo TVenkateshYadavCivarlaNo ratings yet
- Hole and Shaft Basic Sizing System: Fundamental Deviations for Indian Standards IS-919 and BS-4500Document5 pagesHole and Shaft Basic Sizing System: Fundamental Deviations for Indian Standards IS-919 and BS-4500VenkateshYadavCivarlaNo ratings yet
- 10.2 Coordinate Measuring MachinesDocument6 pages10.2 Coordinate Measuring MachinesVenkateshYadavCivarlaNo ratings yet
- Y Sy Ste 2ead: Oo Bo TDocument19 pagesY Sy Ste 2ead: Oo Bo TVenkateshYadavCivarlaNo ratings yet
- Hole and Shaft Basic Sizing System: Fundamental Deviations for Indian Standards IS-919 and BS-4500Document5 pagesHole and Shaft Basic Sizing System: Fundamental Deviations for Indian Standards IS-919 and BS-4500VenkateshYadavCivarlaNo ratings yet
- Elective Age Mbly: &lusoygDocument14 pagesElective Age Mbly: &lusoygVenkateshYadavCivarlaNo ratings yet
- Elective Age Mbly: &lusoygDocument14 pagesElective Age Mbly: &lusoygVenkateshYadavCivarlaNo ratings yet
- Designing precision components within tight tolerancesDocument3 pagesDesigning precision components within tight tolerancesVenkateshYadavCivarlaNo ratings yet
- 0 Mechanics of Metal Cutting-120102095453-Phpapp01Document33 pages0 Mechanics of Metal Cutting-120102095453-Phpapp01VenkateshYadavCivarlaNo ratings yet
- 10.2 Coordinate Measuring MachinesDocument6 pages10.2 Coordinate Measuring MachinesVenkateshYadavCivarlaNo ratings yet
- UGC Guideline IQACsDocument8 pagesUGC Guideline IQACsdeepak4evolutionNo ratings yet
- Projection of Points AssignmentDocument1 pageProjection of Points AssignmentVenkateshYadavCivarlaNo ratings yet
- Fusion 360 For BeginnersDocument6 pagesFusion 360 For BeginnersVenkateshYadavCivarla100% (1)
- 178 - 7 - Fun For Flyers. Progress Tests - 2017, 4th - 91p.pdf Foods NatureDocument1 page178 - 7 - Fun For Flyers. Progress Tests - 2017, 4th - 91p.pdf Foods NatureYu KoNo ratings yet
- Lifeboat Equipment ListDocument1 pageLifeboat Equipment Listjosua albertNo ratings yet
- INTELLISPEC SERIE V-Páginas-31-46Document16 pagesINTELLISPEC SERIE V-Páginas-31-46Antonio Valencia VillejoNo ratings yet
- Chemists 12-2023Document7 pagesChemists 12-2023PRC BaguioNo ratings yet
- Stage 112SE Manual FenderDocument8 pagesStage 112SE Manual FenderDjuang Septa KhalidaNo ratings yet
- Ultra Brochure WMDocument8 pagesUltra Brochure WMSherif AdelNo ratings yet
- Arpèges de Trois Notes: Arpeggios in TripletsDocument3 pagesArpèges de Trois Notes: Arpeggios in TripletspanapapakNo ratings yet
- Max-OT For Dummies - Bodybuilding - Com ForumsDocument21 pagesMax-OT For Dummies - Bodybuilding - Com ForumsPhong QuachNo ratings yet
- Probability Tree Diagrams Solutions Mathsupgrade Co UkDocument10 pagesProbability Tree Diagrams Solutions Mathsupgrade Co UknatsNo ratings yet
- Listening 2 - Log 4 - Answer. SheetDocument3 pagesListening 2 - Log 4 - Answer. SheetNguyen LeeNo ratings yet
- SECURED TRANSACTION BAR CHECKLISTDocument4 pagesSECURED TRANSACTION BAR CHECKLISTatw4377100% (1)
- ALGEBRA Groups 1Document34 pagesALGEBRA Groups 1bravemacnyNo ratings yet
- Mri BrainDocument74 pagesMri Brainagithia100% (1)
- Literature Review On Waste Management in NigeriaDocument9 pagesLiterature Review On Waste Management in NigeriajzneaqwgfNo ratings yet
- Professional Education ReviewerDocument22 pagesProfessional Education ReviewerJustine WicoNo ratings yet
- About WELDA Anchor PlateDocument1 pageAbout WELDA Anchor PlateFircijevi KurajberiNo ratings yet
- San Lam Stratus FundsDocument2 pagesSan Lam Stratus FundsTiso Blackstar GroupNo ratings yet
- CUMSUM Process ControlDocument6 pagesCUMSUM Process Controljess fantonalgoNo ratings yet
- Eddy Current Testing Exam Questions Assignment2Document1 pageEddy Current Testing Exam Questions Assignment2Narotam Kumar GupteshwarNo ratings yet
- Photon BrochureDocument1 pagePhoton Brochureshwetha281889242No ratings yet
- Catanduanes State University: Page 1 of 12Document12 pagesCatanduanes State University: Page 1 of 12Jonah reiNo ratings yet
- BISE Sukkur HSC Part 2 Results 2015Document12 pagesBISE Sukkur HSC Part 2 Results 2015ajayNo ratings yet
- Video Conferencing Lesson PlanDocument6 pagesVideo Conferencing Lesson PlanANN JILLIAN JOYCE MONDONEDO100% (1)
- Report-Teaching English Ministery of EduDocument21 pagesReport-Teaching English Ministery of EduSohrab KhanNo ratings yet
- Online test series analysis reportDocument17 pagesOnline test series analysis reportchetan kapoorNo ratings yet
- Saura, Jasmin E. - DVM - 2B Biochemistry (Activity 2)Document2 pagesSaura, Jasmin E. - DVM - 2B Biochemistry (Activity 2)Jasmin SauraNo ratings yet
- MIT LL. Target Radar Cross Section (RCS)Document45 pagesMIT LL. Target Radar Cross Section (RCS)darin koblickNo ratings yet
- 3152-4 Data SheetDocument2 pages3152-4 Data SheetPhuongNguyenDinhNo ratings yet
- Remove Fuel Sub TankDocument9 pagesRemove Fuel Sub Tankthierry.fifieldoutlook.comNo ratings yet
- Apparent Dip PDFDocument2 pagesApparent Dip PDFanon_114803412No ratings yet