You might also like
- DOM2Document30 pagesDOM2JamesNo ratings yet
- Lecture 02aDocument43 pagesLecture 02aAimal khanNo ratings yet
- Tom 8Document7 pagesTom 8Om TandelNo ratings yet
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- Lesson 1 Balancing of Rotating MassesDocument14 pagesLesson 1 Balancing of Rotating MassesNjabulo NgobeseNo ratings yet
- ROTATING MASSES BALANCINGDocument25 pagesROTATING MASSES BALANCINGEngineering DesignNo ratings yet
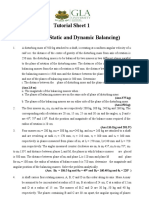
- Tutorial Sheet 1Document3 pagesTutorial Sheet 1Shashank SrivastavaNo ratings yet
- Balancing NotesDocument63 pagesBalancing NotesMithashree MNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedHizbullah SattiNo ratings yet
- Balancing Rotating MassesDocument25 pagesBalancing Rotating Masseslulu adityaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedRuchindra KumarNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedSrinivas BalivadaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedSrinivas BalivadaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedMohammad Ishfaq BhatNo ratings yet
- Balancing of Rotating MassesDocument13 pagesBalancing of Rotating MassesAjwad HaziqNo ratings yet
- Balancing Dynamics Machinery TutorialDocument18 pagesBalancing Dynamics Machinery TutorialPatel Brijesh MahendrabhaiNo ratings yet
- Unit II Balancingofrotatingmasses 210207040000Document23 pagesUnit II Balancingofrotatingmasses 210207040000ShanmuganathanNo ratings yet
- Balancing 121212095610 Phpapp02Document59 pagesBalancing 121212095610 Phpapp02Harith TsaqifNo ratings yet
- Static & Dynamic BalancingDocument5 pagesStatic & Dynamic BalancingSchöberl ErichNo ratings yet
- BALANCING ROTATING MASSESDocument26 pagesBALANCING ROTATING MASSESEngineering DesignNo ratings yet
- UTHM Mechanical Engineering document on rotor balancingDocument46 pagesUTHM Mechanical Engineering document on rotor balancinghamryNo ratings yet
- ICSE X FORCE REMEDIAL REVISION-mergedDocument8 pagesICSE X FORCE REMEDIAL REVISION-mergedanimeshtechnosNo ratings yet
- Assignment 2Document4 pagesAssignment 2Durai SivamNo ratings yet
- Theory of Machines practice problems and answersDocument3 pagesTheory of Machines practice problems and answersInsideBest10No ratings yet
- Lab Session No 10: Learning ObjectiveDocument18 pagesLab Session No 10: Learning ObjectiveMuhammad AbdullahNo ratings yet
- Sme1206-2 0Document25 pagesSme1206-2 0Anantha ReddyNo ratings yet
- Balancing of Rotating Masses (DDT)Document3 pagesBalancing of Rotating Masses (DDT)Sunny BhatiaNo ratings yet
- DOM QP ScribdDocument5 pagesDOM QP ScribdvsanthanamNo ratings yet
- Dynamics Unit II AssignmentDocument2 pagesDynamics Unit II Assignmentkannanviknesh086319No ratings yet
- Design and Fabrication of Static and Dynamic Balancing ApparatusDocument19 pagesDesign and Fabrication of Static and Dynamic Balancing ApparatusOmkarNo ratings yet
- Dom Qbank IIIDocument5 pagesDom Qbank IIISabareeswaran MurugesanNo ratings yet
- Balancing of Rotating MassesDocument17 pagesBalancing of Rotating MassesEr Sumit SarkalanNo ratings yet
- Lect BalancingDocument72 pagesLect BalancingTalha KhanzadaNo ratings yet
- Dynamics of Machines UNIT-02 Part-ADocument2 pagesDynamics of Machines UNIT-02 Part-ASakthivel KarunakaranNo ratings yet
- Four masses balancing problem with given radii, angles and required balancing massDocument1 pageFour masses balancing problem with given radii, angles and required balancing massMohd Javed IqbalNo ratings yet
- Module-4 - Balancing of Rotating MassesDocument46 pagesModule-4 - Balancing of Rotating MassesNIKHIL ASNo ratings yet
- EME2204 - Assignment - Balancing - 2023Document2 pagesEME2204 - Assignment - Balancing - 2023Jamiza shenningNo ratings yet
- Balancing Rotating MassesDocument225 pagesBalancing Rotating MassesBaran Shafqat100% (1)
- Unit - V BalancingDocument9 pagesUnit - V BalancingdoomraNo ratings yet
- Balancing Theory of M/C PDFDocument6 pagesBalancing Theory of M/C PDFSandip GhoshNo ratings yet
- Assignment 2 Mekanik Mesin S1 - 20132014Document2 pagesAssignment 2 Mekanik Mesin S1 - 20132014Nadia BalqisNo ratings yet
- Balancing of Reciprocating 2023Document57 pagesBalancing of Reciprocating 2023polygatoneoderaNo ratings yet
- CHP 29Document13 pagesCHP 29Abhiram Reddy100% (1)
- Static and Dynamic Balancing of RotorsDocument9 pagesStatic and Dynamic Balancing of Rotorspaul1ttoNo ratings yet
- Experiment # 8: Title: ObjectiveDocument7 pagesExperiment # 8: Title: ObjectiveIbrahim BabarNo ratings yet
- End Term Lab Reports TOMDocument26 pagesEnd Term Lab Reports TOMSabtain AbbasNo ratings yet
- Week Slides Theory of MachineDocument44 pagesWeek Slides Theory of MachineAhmad AbdNo ratings yet
- Static Mechanical System Section1: Stress, Shear Force and Bending MomentDocument17 pagesStatic Mechanical System Section1: Stress, Shear Force and Bending MomentHadhi Hassan KhanNo ratings yet
- Unit Ii Balancing Part ADocument15 pagesUnit Ii Balancing Part AsureshkumarNo ratings yet
- Balancing of Reciprocating MassesDocument24 pagesBalancing of Reciprocating MassesSomnath SomadderNo ratings yet
- Shear and MomentDocument48 pagesShear and MomentMartina CelsoNo ratings yet
- 19ME5603 DOM Unit II QuestionsDocument3 pages19ME5603 DOM Unit II QuestionsRobinston Jeyasingh KNo ratings yet
- Balancing: Submitted By: Kanwaldeep SinghDocument23 pagesBalancing: Submitted By: Kanwaldeep SinghVigil J VijayanNo ratings yet
- TOPIC 1. Balancint of Rotating MassesDocument17 pagesTOPIC 1. Balancint of Rotating MassesOrbital TechNo ratings yet
- Balancing Reciprocating MassesDocument29 pagesBalancing Reciprocating MassesPraful KhondeNo ratings yet
- Bending moment beam experimentDocument25 pagesBending moment beam experimentGregory Miller50% (2)
- DOM Question Bank Unit 1 &2 (1) - 1Document5 pagesDOM Question Bank Unit 1 &2 (1) - 1SMHD19 NIKHIL NARKHEDENo ratings yet
- QU GE211 Calendar 372 PinkDocument13 pagesQU GE211 Calendar 372 PinkDanialNo ratings yet
- Pressure Measurement Methods Using U-Tube and Inclined ManometersDocument7 pagesPressure Measurement Methods Using U-Tube and Inclined ManometersDanialNo ratings yet
- Ass Chapter 1 (Mixture) - SolDocument4 pagesAss Chapter 1 (Mixture) - SolDanialNo ratings yet
- Engineering Thermodynamics - A Computer Approach (SI Units Version) - R. K. Rajput PDFDocument431 pagesEngineering Thermodynamics - A Computer Approach (SI Units Version) - R. K. Rajput PDFShahzad Ali RanaNo ratings yet
- StoichiometryDocument20 pagesStoichiometryDanang Satriya PutraNo ratings yet
- QU Lab First Day Material 372 GreenDocument6 pagesQU Lab First Day Material 372 GreenDanialNo ratings yet
- 5 QU Student Sign Off 372 BlueDocument1 page5 QU Student Sign Off 372 BlueDanialNo ratings yet
- 5 QU Student Sign Off 372 BlueDocument1 page5 QU Student Sign Off 372 BlueDanialNo ratings yet
- Amem201 Group1 Multiple Choice Q&A Amem201Document4 pagesAmem201 Group1 Multiple Choice Q&A Amem201Aero NaveenNo ratings yet
- Ge 211 Student Enter Exit Survey 372 BlueDocument1 pageGe 211 Student Enter Exit Survey 372 BlueDanialNo ratings yet
- Concept Folder Contents CHK ListDocument1 pageConcept Folder Contents CHK ListDanialNo ratings yet
- QU Concepts First Day Material 372 YellowDocument13 pagesQU Concepts First Day Material 372 YellowDanialNo ratings yet
- Materials Engineering (ME 252) : Dr. Hany AmmarDocument19 pagesMaterials Engineering (ME 252) : Dr. Hany AmmarDanialNo ratings yet
- How To Give Good PresentationDocument23 pagesHow To Give Good PresentationDanialNo ratings yet
- ME252Document3 pagesME252DanialNo ratings yet
- ME 252 Materials Engineering Lab Experiment (1) Microspecimen Preparation and Use of The Metallurgical Microscope Due Date: The 3 WeekDocument3 pagesME 252 Materials Engineering Lab Experiment (1) Microspecimen Preparation and Use of The Metallurgical Microscope Due Date: The 3 WeekDanialNo ratings yet
- Hardness Test Compares Aluminum and SteelDocument4 pagesHardness Test Compares Aluminum and SteelDanialNo ratings yet
- Back of Your Concept FolderDocument1 pageBack of Your Concept FolderDanialNo ratings yet
- Hardness Test Compares Aluminum and SteelDocument4 pagesHardness Test Compares Aluminum and SteelDanialNo ratings yet
- ME252Document3 pagesME252DanialNo ratings yet
- ME252 - Experiment 2Document3 pagesME252 - Experiment 2DanialNo ratings yet
- EE339 Ch1Document62 pagesEE339 Ch1DanialNo ratings yet
- ME252 - Experiment 2Document3 pagesME252 - Experiment 2DanialNo ratings yet
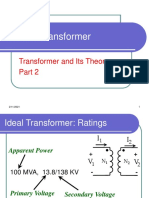
- Lecture Transformer: Transformer and Its TheoryDocument39 pagesLecture Transformer: Transformer and Its TheoryDanialNo ratings yet
- EE-330 Ch-4 Synchronous GeneratorsDocument110 pagesEE-330 Ch-4 Synchronous GeneratorsDanialNo ratings yet
- ME 252 Materials Engineering Lab Experiment (1) Microspecimen Preparation and Use of The Metallurgical Microscope Due Date: The 3 WeekDocument3 pagesME 252 Materials Engineering Lab Experiment (1) Microspecimen Preparation and Use of The Metallurgical Microscope Due Date: The 3 WeekDanialNo ratings yet
- Materials Engineering (ME 252) : Dr. Hany AmmarDocument19 pagesMaterials Engineering (ME 252) : Dr. Hany AmmarDanialNo ratings yet
- Transformer and Its TheoryDocument30 pagesTransformer and Its TheoryDanialNo ratings yet
- EE-339 First - Day - MaterialDocument3 pagesEE-339 First - Day - MaterialDanialNo ratings yet
- Construction and Operation of Synchronous GeneratorsDocument37 pagesConstruction and Operation of Synchronous GeneratorsDanialNo ratings yet
- Ch. 32 - Optical ImagesDocument19 pagesCh. 32 - Optical ImagesAbdallah IslaihNo ratings yet
- Zocca2015 PDFDocument19 pagesZocca2015 PDFBeesam Ramesh KumarNo ratings yet
- Field Work Report on Social Services at Mukono DistrictDocument36 pagesField Work Report on Social Services at Mukono Districtronny rymes tusubira100% (2)
- 02 WholeDocument155 pages02 WholeTayeb CheliremNo ratings yet
- International Application InstructionsDocument4 pagesInternational Application InstructionsTahiNo ratings yet
- Fed Question BankDocument5 pagesFed Question BankAnonymous eWMnRr70qNo ratings yet
- Euler's Method:Method of Solving Differential Equations of The First Order (The Easy Ones)Document12 pagesEuler's Method:Method of Solving Differential Equations of The First Order (The Easy Ones)Ahmed HassanNo ratings yet
- Statim 5000Document2 pagesStatim 5000Alexandra JanicNo ratings yet
- TAU 2 Course Material v2.1Document40 pagesTAU 2 Course Material v2.1sreenathNo ratings yet
- Sendai Framework For DRRDocument19 pagesSendai Framework For DRRAryaaaNo ratings yet
- Toxicology Conversion Chart for PPM, PPB, mg/l and Other UnitsDocument2 pagesToxicology Conversion Chart for PPM, PPB, mg/l and Other UnitsWilliam ThompsonNo ratings yet
- Dian Medisa, Hady Anshory, Putri Litapriani, Rezky Fajriyati MDocument9 pagesDian Medisa, Hady Anshory, Putri Litapriani, Rezky Fajriyati MNada LathifahNo ratings yet
- Chemegic Job Interview QuestionnaireDocument5 pagesChemegic Job Interview QuestionnaireLuisa FernandaNo ratings yet
- Aries Vs Gemini, VirgoDocument2 pagesAries Vs Gemini, VirgoIsabella BalcosNo ratings yet
- Answer Key - CK-12 Chapter 09 Algebra 1 Honors Concepts (Revised)Document9 pagesAnswer Key - CK-12 Chapter 09 Algebra 1 Honors Concepts (Revised)Anni LaritaNo ratings yet
- Joel Rubano - Trader Construction Kit_ Fundamental & Technical Analysis, Risk Management, Directional Trading, Spreads, Options, Quantitative Strategies, Execution, Position Management, Data Science &Document592 pagesJoel Rubano - Trader Construction Kit_ Fundamental & Technical Analysis, Risk Management, Directional Trading, Spreads, Options, Quantitative Strategies, Execution, Position Management, Data Science &Muhammad Ali100% (1)
- Frankenstein Episode 2 - It's Alive!Document4 pagesFrankenstein Episode 2 - It's Alive!Jean Claude AgostiniNo ratings yet
- MR Star Boy FormateDocument17 pagesMR Star Boy Formatechiedo goldenNo ratings yet
- M4 NSTP1Document2 pagesM4 NSTP1Guki SuzukiNo ratings yet
- A Different Pond by Bao PhiDocument12 pagesA Different Pond by Bao PhiSheena AguilarNo ratings yet
- JNTUK - Revised Syllabus For M. Tech Transportation EngineeringDocument20 pagesJNTUK - Revised Syllabus For M. Tech Transportation Engineeringvamsi_rsNo ratings yet
- MET 2017 Child and AdolDocument193 pagesMET 2017 Child and AdolFerlyn Serio AguilarNo ratings yet
- Eltorai, Ibrahim M A Spotlight On The History of Ancient EgyptianDocument215 pagesEltorai, Ibrahim M A Spotlight On The History of Ancient EgyptianJonas PsontomfanceNo ratings yet
- Lesson 1 - PMP Authorized Exam Prep - V3 - Business EnvironmentDocument105 pagesLesson 1 - PMP Authorized Exam Prep - V3 - Business EnvironmentmaiyomarionneNo ratings yet
- Guide For The Use of Educational Resources - Software Smith V4.0Document7 pagesGuide For The Use of Educational Resources - Software Smith V4.0Sebastián Barona VélezNo ratings yet
- Verbal Ability SolutionsDocument19 pagesVerbal Ability Solutionsfalguni rathodNo ratings yet
- STATISTIC AND PROBABILITY 1ST QUARTER EXAM - SourceDocument72 pagesSTATISTIC AND PROBABILITY 1ST QUARTER EXAM - SourceAmanda Dinah RamilNo ratings yet
- ELE02 Inquiry Based ApproachDocument5 pagesELE02 Inquiry Based ApproachAuditor, Clarence ReyNo ratings yet
- Branches of Forensic ScienceDocument4 pagesBranches of Forensic ScienceIan owisoNo ratings yet
- GRC/SPE Workshop: High-Temperature Well Cementing and IntegrityDocument6 pagesGRC/SPE Workshop: High-Temperature Well Cementing and IntegrityesyNo ratings yet