You might also like
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)From EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No ratings yet
- Chap 6-1Document22 pagesChap 6-1Mareyam DnglNo ratings yet
- MathsTraks: Geometry: A Collection of Blackline Masters for ages 11-14From EverandMathsTraks: Geometry: A Collection of Blackline Masters for ages 11-14No ratings yet
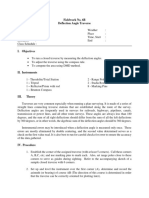
- Fieldwork No. 6b (Deflection Angle Traverse)Document5 pagesFieldwork No. 6b (Deflection Angle Traverse)20101789No ratings yet
- Compute of CoordinatesDocument5 pagesCompute of Coordinatesjoshua stevenNo ratings yet
- Islamic University of Gaza Civil Engineering Department: Surveying II ECIV 2332Document26 pagesIslamic University of Gaza Civil Engineering Department: Surveying II ECIV 2332Mi MiNo ratings yet
- Presentation Concepts v2Document35 pagesPresentation Concepts v2Kalasekar M SwamyNo ratings yet
- Unit 04 - TrigonometryDocument37 pagesUnit 04 - TrigonometrySneaky peteNo ratings yet
- Chapter Six Control SurveyDocument57 pagesChapter Six Control SurveyAbraham DerejeNo ratings yet
- Geometry 12 ReviewerDocument8 pagesGeometry 12 ReviewerBlanche Iris Estrel SiapnoNo ratings yet
- Chapter IVDocument49 pagesChapter IVFiraolNo ratings yet
- Lecture 2aDocument28 pagesLecture 2aAndrei GuelasNo ratings yet
- Trig Notes With Cover PageDocument125 pagesTrig Notes With Cover PageHarsh Gupta100% (2)
- Master traverse fundamentals and computationsDocument29 pagesMaster traverse fundamentals and computationsAizat Sera SuwandiNo ratings yet
- Traversing (Surveying)Document49 pagesTraversing (Surveying)nmo izeanNo ratings yet
- MA1200 L1 ConicsectionDocument67 pagesMA1200 L1 ConicsectionChun Hin ChanNo ratings yet
- Geom82022 ExamDocument32 pagesGeom82022 ExamAdam BresslerNo ratings yet
- Math04_CO3_SY20222023Document64 pagesMath04_CO3_SY20222023LinearNo ratings yet
- Angular KinematicsDocument42 pagesAngular KinematicsSaima JabbarNo ratings yet
- Topography Week 7 9traverse ComputationsDocument20 pagesTopography Week 7 9traverse Computationsjeremiah ogana mangeniNo ratings yet
- Deflection Angle TraverseDocument5 pagesDeflection Angle TraverseJustine BotillaNo ratings yet
- Traversing Notes - Surveying II - Sudip Khadka - CivilengineeringDocument37 pagesTraversing Notes - Surveying II - Sudip Khadka - CivilengineeringSudip KhadkaNo ratings yet
- 9.traversing (Theodolite)Document25 pages9.traversing (Theodolite)Mercy SimangoNo ratings yet
- Area & Volume GuideDocument14 pagesArea & Volume Guidesecond mnwwrhNo ratings yet
- Chapter 3 Part 3 Vector Loop MethodDocument14 pagesChapter 3 Part 3 Vector Loop Methodrobel metikuNo ratings yet
- FW 6A Interior Angle TraverseDocument4 pagesFW 6A Interior Angle TraverseMaria TheresaNo ratings yet
- Name parts of a circle and angles in a geometry figure/TITLEDocument26 pagesName parts of a circle and angles in a geometry figure/TITLEApril SantiagoNo ratings yet
- Lesson Plan GET SP Grade 8 Mathematics Term 2 Week 4 GEOMETRY OF STRAIGHT LINESDocument25 pagesLesson Plan GET SP Grade 8 Mathematics Term 2 Week 4 GEOMETRY OF STRAIGHT LINESAishvarya RashmiNo ratings yet
- Tacheometry - Stadia System: KS SinDocument48 pagesTacheometry - Stadia System: KS SindoggyNo ratings yet
- TraversingDocument21 pagesTraversingRubymae BarlaanNo ratings yet
- Experimental and Theoretical Unsymmetrical Bending of an L BeamDocument9 pagesExperimental and Theoretical Unsymmetrical Bending of an L BeamCE19M014 Gugulothu SurendarNo ratings yet
- AVO Course 2Document47 pagesAVO Course 2AwangSsudNo ratings yet
- Horizontal Control Traverse Types Azimuths Departure LatitudeDocument6 pagesHorizontal Control Traverse Types Azimuths Departure Latitudewaleed shahidNo ratings yet
- Well Survey MethodDocument44 pagesWell Survey MethodSHUBHAM SINGHNo ratings yet
- Handout - TRAVERSE SURVEYINGDocument14 pagesHandout - TRAVERSE SURVEYINGCCCCCCCNo ratings yet
- Traversing: Lester E. Carter, JR., PLS City of San DiegoDocument12 pagesTraversing: Lester E. Carter, JR., PLS City of San DiegoHamza Al-SharifNo ratings yet
- Engineering Mechanics: StaticsDocument44 pagesEngineering Mechanics: StaticsDaya AhmadNo ratings yet
- Geometry Packet Answers 7Document23 pagesGeometry Packet Answers 7Mariah PrudencioNo ratings yet
- Pre-Calculus Chapter 3 TrigonometryDocument13 pagesPre-Calculus Chapter 3 TrigonometryaiNo ratings yet
- Unit 7Document71 pagesUnit 7aliaqeel2000No ratings yet
- TraversingDocument27 pagesTraversingUsha AucharazNo ratings yet
- 2 - Angles and Their MeasurementsDocument47 pages2 - Angles and Their Measurementsbonifacio gianga jrNo ratings yet
- Angles in A Unit Circle: Week 1Document7 pagesAngles in A Unit Circle: Week 1Richard OrpianoNo ratings yet
- Closed Traverse Lab ComputationDocument2 pagesClosed Traverse Lab ComputationMiguel VilchisNo ratings yet
- BSED MATH 3 Plane Trigo Module 2 1Document15 pagesBSED MATH 3 Plane Trigo Module 2 1Jhanes Kent FatNo ratings yet
- Understanding Meridians and Bearing SystemsDocument5 pagesUnderstanding Meridians and Bearing SystemsUlfathbary ABNo ratings yet
- A Review of The Complex Number System: Principles of Electric Circuits, Conventional Flow, 9 EdDocument14 pagesA Review of The Complex Number System: Principles of Electric Circuits, Conventional Flow, 9 EdVinNo ratings yet
- A A X y Z A A: CIS - Homework 4Document6 pagesA A X y Z A A: CIS - Homework 4iKs279No ratings yet
- Ce3512 Survey Camp-1Document15 pagesCe3512 Survey Camp-1C.V. SHARMAHNo ratings yet
- Geometry FinalDocument5 pagesGeometry FinalPeter V DatoyNo ratings yet
- Commonly Used in Structural Geology Commonly Used in Min/crystalDocument27 pagesCommonly Used in Structural Geology Commonly Used in Min/crystalRogerio DiasNo ratings yet
- MIT 213 Day 2 - ADocument17 pagesMIT 213 Day 2 - AprageethmohottyNo ratings yet
- C12 Formula SheetDocument16 pagesC12 Formula SheetRizwan HamidNo ratings yet
- C12 Formula Sheet PDFDocument16 pagesC12 Formula Sheet PDFRizwan HamidNo ratings yet
- (Updated File) Job # 5. To Find The Area of Traverse by Triangulation MethodDocument9 pages(Updated File) Job # 5. To Find The Area of Traverse by Triangulation MethodUsama Bin YousufNo ratings yet
- Angular Measurements - 6Document33 pagesAngular Measurements - 6Ahmed GamalNo ratings yet
- Fieldwork No. 4b (Inclined Stadia Sights Using Theodolite)Document8 pagesFieldwork No. 4b (Inclined Stadia Sights Using Theodolite)7307628No ratings yet
- Topic 5: Trigonometric Functions DIM5058Document11 pagesTopic 5: Trigonometric Functions DIM5058MD ROKNUZZAMANNo ratings yet
- Final Trigonometry 1Document132 pagesFinal Trigonometry 1vevek mandaNo ratings yet
- 01introduction of Subgrade and Pavement EngineeringDocument29 pages01introduction of Subgrade and Pavement EngineeringDORINNo ratings yet
- 1 Overview of Project ManagementDocument25 pages1 Overview of Project ManagementDORINNo ratings yet
- Engineering Geology FundamentalsDocument76 pagesEngineering Geology FundamentalsDORINNo ratings yet
- 1-Earthquake and Ground Motions-1 - 2020Document44 pages1-Earthquake and Ground Motions-1 - 2020DORINNo ratings yet
- Road Tunnel: Chinese Name: Bing, WANG School of Civil Engineering Shenyang Jianzhu UniversityDocument19 pagesRoad Tunnel: Chinese Name: Bing, WANG School of Civil Engineering Shenyang Jianzhu UniversityDORINNo ratings yet
- South S82 Extended ManualDocument37 pagesSouth S82 Extended ManualTudor CherhatNo ratings yet
- IACS US GaugingDocument3 pagesIACS US Gaugingbenderman1No ratings yet
- Surveying Unit-1Document64 pagesSurveying Unit-1deshabodanaveenNo ratings yet
- MIDLANDS STATE UNIVERSITY GNSS ASSIGNMENTDocument6 pagesMIDLANDS STATE UNIVERSITY GNSS ASSIGNMENTTULIPOHAMBA BEVENALIUS JASONNo ratings yet
- Working With Grid Coordinates Richard J. Sincovec, LSIDocument26 pagesWorking With Grid Coordinates Richard J. Sincovec, LSISuta Vijaya0% (1)
- Surveying NotesDocument39 pagesSurveying NotesInhen Yero75% (4)
- Raj - Colonial EncountersDocument17 pagesRaj - Colonial EncountersMarуana MyroshNo ratings yet
- Site Visit Gis Summary ReportDocument3 pagesSite Visit Gis Summary ReportaryaNo ratings yet
- Darla Srinivasa Rao EngineeringDocument3 pagesDarla Srinivasa Rao EngineeringSrinivasa_DRao_6174No ratings yet
- Types Ofand Principle of Surveying, Triangulation, Traversing, Objects of SurveyingDocument37 pagesTypes Ofand Principle of Surveying, Triangulation, Traversing, Objects of SurveyingNivashini VindhyaNo ratings yet
- Circular 25 2019Document168 pagesCircular 25 2019jonnydeep1970virgilio.itNo ratings yet
- Mohammad Shakeel Afzal: Land SurveyorDocument5 pagesMohammad Shakeel Afzal: Land Surveyorthumkhonho0% (1)
- Chapter 4Document17 pagesChapter 4Mesuod MohammedNo ratings yet
- History of SurveyingDocument6 pagesHistory of SurveyingM Faizan FarooqNo ratings yet
- Surveying FormulasDocument14 pagesSurveying FormulasMichael Mutale80% (5)
- Chapter Two Units of Measurements and Theory of ErrorsDocument15 pagesChapter Two Units of Measurements and Theory of Errorsyared molaNo ratings yet
- On The Job Training EssayDocument5 pagesOn The Job Training EssayAngelica GicomNo ratings yet
- Sokkia Sdr33 User ManualDocument6 pagesSokkia Sdr33 User Manualalyazid faghloumi100% (1)
- 3600 Zeiss Elta Software User Guide B&E 571703011 Ver0300 ENG PDFDocument186 pages3600 Zeiss Elta Software User Guide B&E 571703011 Ver0300 ENG PDFJseSanabriaNo ratings yet
- Magellan Pro Mark 500 RM A enDocument330 pagesMagellan Pro Mark 500 RM A enPaul Mihai IrimescuNo ratings yet
- QUANT Sis BunmiiiiiDocument20 pagesQUANT Sis BunmiiiiinaconnetNo ratings yet
- Civil Engineering - Septic Tank DrawingsDocument65 pagesCivil Engineering - Septic Tank DrawingsAnonymous sId0uhkEIV100% (1)
- MAEU UAV Research Department Develops Drones for Civilian ApplicationsDocument53 pagesMAEU UAV Research Department Develops Drones for Civilian ApplicationsMyo Myint AungNo ratings yet
- DPR Chapter 2 Approach and MethodologyDocument9 pagesDPR Chapter 2 Approach and MethodologyManmatha SahooNo ratings yet
- Quantity Surveying Softwares, Trends & Their Impact On Quantity SurveyorsDocument51 pagesQuantity Surveying Softwares, Trends & Their Impact On Quantity SurveyorsAsanka RathnayakeNo ratings yet
- Report Ukur TrabasDocument7 pagesReport Ukur TrabasMuhammad ShaqeelNo ratings yet
- Lesson 10 - LevelingDocument37 pagesLesson 10 - LevelingJohn Andrei PorrasNo ratings yet
- Triangulation ADocument13 pagesTriangulation AYakob ZerihunNo ratings yet
- BRH - Survey - Comps TextbookDocument291 pagesBRH - Survey - Comps TextbookAlex NkurunzizaNo ratings yet
- Lovely Professional University, Punjab: Detailed Plan For LecturesDocument6 pagesLovely Professional University, Punjab: Detailed Plan For LecturesSatyabhama SanasamNo ratings yet
- Water to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesFrom EverandWater to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesRating: 4 out of 5 stars4/5 (21)
- The Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterFrom EverandThe Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterNo ratings yet
- Smokejumper: A Memoir by One of America's Most Select Airborne FirefightersFrom EverandSmokejumper: A Memoir by One of America's Most Select Airborne FirefightersNo ratings yet
- Periodic Tales: A Cultural History of the Elements, from Arsenic to ZincFrom EverandPeriodic Tales: A Cultural History of the Elements, from Arsenic to ZincRating: 3.5 out of 5 stars3.5/5 (137)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- Alien Oceans: The Search for Life in the Depths of SpaceFrom EverandAlien Oceans: The Search for Life in the Depths of SpaceRating: 4.5 out of 5 stars4.5/5 (26)
- Survival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosFrom EverandSurvival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosRating: 3.5 out of 5 stars3.5/5 (8)
- A Brief History of Earth: Four Billion Years in Eight ChaptersFrom EverandA Brief History of Earth: Four Billion Years in Eight ChaptersRating: 4 out of 5 stars4/5 (111)
- When Humans Nearly Vanished: The Catastrophic Explosion of the Toba VolcanoFrom EverandWhen Humans Nearly Vanished: The Catastrophic Explosion of the Toba VolcanoRating: 4.5 out of 5 stars4.5/5 (34)
- Chemtrails, HAARP, and the Full Spectrum Dominance of Planet EarthFrom EverandChemtrails, HAARP, and the Full Spectrum Dominance of Planet EarthRating: 4.5 out of 5 stars4.5/5 (5)
- When the Sahara Was Green: How Our Greatest Desert Came to BeFrom EverandWhen the Sahara Was Green: How Our Greatest Desert Came to BeRating: 4.5 out of 5 stars4.5/5 (5)
- Timefulness: How Thinking Like a Geologist Can Help Save the WorldFrom EverandTimefulness: How Thinking Like a Geologist Can Help Save the WorldRating: 4.5 out of 5 stars4.5/5 (66)
- A Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangeFrom EverandA Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangeRating: 5 out of 5 stars5/5 (4)
- The Elements We Live By: How Iron Helps Us Breathe, Potassium Lets Us See, and Other Surprising Superpowers of the Periodic TableFrom EverandThe Elements We Live By: How Iron Helps Us Breathe, Potassium Lets Us See, and Other Surprising Superpowers of the Periodic TableRating: 3.5 out of 5 stars3.5/5 (22)
- Desert Solitaire: A Season in the WildernessFrom EverandDesert Solitaire: A Season in the WildernessRating: 4.5 out of 5 stars4.5/5 (120)
- Into the Planet: My Life as a Cave DiverFrom EverandInto the Planet: My Life as a Cave DiverRating: 3.5 out of 5 stars3.5/5 (38)
- Being Human: Life Lessons from the Frontiers of Science (Transcript)From EverandBeing Human: Life Lessons from the Frontiers of Science (Transcript)Rating: 4.5 out of 5 stars4.5/5 (10)