You might also like
- Notes - Translating Expressions and Sentences PDFDocument5 pagesNotes - Translating Expressions and Sentences PDFMaxine GarraNo ratings yet
- Lecture 5 - Solution Methods Applied Computational Fluid DynamicsDocument41 pagesLecture 5 - Solution Methods Applied Computational Fluid DynamicsRajasakthikumarRajendranNo ratings yet
- Finite Volume: Basic MethodologyDocument28 pagesFinite Volume: Basic MethodologySrinathReddyNo ratings yet
- FVM PPT - 1204209831690 - CFD - FVMDocument43 pagesFVM PPT - 1204209831690 - CFD - FVMAsesh PramanikNo ratings yet
- Lecture 5 - Solution Methods Applied Computational Fluid DynamicsDocument41 pagesLecture 5 - Solution Methods Applied Computational Fluid Dynamicsmailsk123No ratings yet
- Differential Analysis of Fluid FlowDocument48 pagesDifferential Analysis of Fluid FlowsineNo ratings yet
- Chapter 1-Differential Approach To Flow AnalysisDocument36 pagesChapter 1-Differential Approach To Flow Analysisputerasyam39No ratings yet
- Chapter 05 PDFDocument28 pagesChapter 05 PDFYavuz Can GürelNo ratings yet
- Discretization of Convection - Diffusion Type Equation: 10 Indo - German Winter Academy 2011Document50 pagesDiscretization of Convection - Diffusion Type Equation: 10 Indo - German Winter Academy 2011Gaurav KulkarniNo ratings yet
- FVM Crash IntroDocument202 pagesFVM Crash IntroThierry Gnasiri Godwe HinsouNo ratings yet
- Simulation of Diffusion: Steady-State Diffusion Transient DiffusionDocument16 pagesSimulation of Diffusion: Steady-State Diffusion Transient DiffusionSai PreethamNo ratings yet
- Fluid Mechanics - 1: Flow Analysis Using Control VolumesDocument40 pagesFluid Mechanics - 1: Flow Analysis Using Control Volumesaunabbas_90No ratings yet
- MBC W1-2 NotesDocument21 pagesMBC W1-2 NotesDio ShinNo ratings yet
- The Basic Finite Volume MethodDocument15 pagesThe Basic Finite Volume MethodAlasdi AhmedNo ratings yet
- Reservoir Model OptimizationDocument27 pagesReservoir Model OptimizationMauricio Sanchez BernalNo ratings yet
- 1D Example: Partial Differential Equations Finite Difference Method Finite Element MethodDocument3 pages1D Example: Partial Differential Equations Finite Difference Method Finite Element MethodJishnu JayarajNo ratings yet
- Comp Free Surf Flows C2Document42 pagesComp Free Surf Flows C2billNo ratings yet
- 1st Attempt Final Exam-Term - 2018-2019Document2 pages1st Attempt Final Exam-Term - 2018-2019alhussenyNo ratings yet
- A Double Time-Scale CNN Solving Two-Dimensional Navier-Stokes EquationstDocument7 pagesA Double Time-Scale CNN Solving Two-Dimensional Navier-Stokes EquationstMateus Costa PinheiroNo ratings yet
- (Intuition: Conservation LawDocument17 pages(Intuition: Conservation LawElayavel RajaNo ratings yet
- Chap 9 Differential Analysis of Fluid Flow - CompleteDocument70 pagesChap 9 Differential Analysis of Fluid Flow - CompleteMusa Van SarNo ratings yet
- FVM Crash Intro PDFDocument111 pagesFVM Crash Intro PDFmartini.simNo ratings yet
- vasp实现隐式溶剂模型Document17 pagesvasp实现隐式溶剂模型liang6.62607015No ratings yet
- CFD - II Chapter 4 FVM For Convection-Diffusion ProblemDocument59 pagesCFD - II Chapter 4 FVM For Convection-Diffusion ProblemChetanPrajapati100% (2)
- Chapter 05 MDocument17 pagesChapter 05 MamirNo ratings yet
- Module 6Document351 pagesModule 6Chien NguyenNo ratings yet
- CFD at Chapter-3Document22 pagesCFD at Chapter-3Pawan KumarNo ratings yet
- 12 UpscaleDocument53 pages12 UpscaleNaufal FadhlurachmanNo ratings yet
- CME 4425 Introduction To Bioinformatics Algorithms: Zerrin Işık Zerrin@cs - Deu.edu - TRDocument43 pagesCME 4425 Introduction To Bioinformatics Algorithms: Zerrin Işık Zerrin@cs - Deu.edu - TRMahmud KorkmazNo ratings yet
- PDF Crop PDFDocument64 pagesPDF Crop PDFwhiplash527No ratings yet
- Drag On Ellipsoids at Finite Reynolds NumbersDocument9 pagesDrag On Ellipsoids at Finite Reynolds NumbersSamuel OnyewuenyiNo ratings yet
- Topic4 - Moment Distribution Frames With SidewayDocument23 pagesTopic4 - Moment Distribution Frames With SidewayMary Joanne Capacio AniñonNo ratings yet
- Russell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmDocument20 pagesRussell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmirinarmNo ratings yet
- Simple Parallel Algorithms For Single-Site Dynamics: Hongyang Liu Yitong YinDocument29 pagesSimple Parallel Algorithms For Single-Site Dynamics: Hongyang Liu Yitong Yinr liNo ratings yet
- Chapter Six (Mass Energy Analysis of Control Volume) PDFDocument51 pagesChapter Six (Mass Energy Analysis of Control Volume) PDFايات امجد امجدNo ratings yet
- 01-Introduction To Reservoir SimulationDocument18 pages01-Introduction To Reservoir SimulationWaleed Barakat MariaNo ratings yet
- Atp BWDocument31 pagesAtp BWHoussem HamdiNo ratings yet
- 1st Attempt Final Exam-Term - 2019-2020Document2 pages1st Attempt Final Exam-Term - 2019-2020alhussenyNo ratings yet
- Fedsm2017 69174Document7 pagesFedsm2017 69174datam38No ratings yet
- Lec07 ConstraintsatisfactionDocument46 pagesLec07 ConstraintsatisfactionMD AminNo ratings yet
- Slide 2 - Reservoir SimulationDocument37 pagesSlide 2 - Reservoir SimulationAdmirerNo ratings yet
- WAsP Limitations and CFD PresentationDocument37 pagesWAsP Limitations and CFD PresentationHéctor LodosoNo ratings yet
- Chapter 5: Mass, Bernoulli, and Energy Equations: Eric G. PatersonDocument26 pagesChapter 5: Mass, Bernoulli, and Energy Equations: Eric G. PatersonnyarkokumiNo ratings yet
- One-Way ANOVA: Multiple ComparisonsDocument39 pagesOne-Way ANOVA: Multiple Comparisonsasep septianNo ratings yet
- Chapter 05Document25 pagesChapter 05Bekir AçıkçaNo ratings yet
- 1.1 Internal Effectiveness FactorsDocument11 pages1.1 Internal Effectiveness FactorsVaidish SumariaNo ratings yet
- Air Plane AerodynimcsDocument1 pageAir Plane AerodynimcsAbdelrahman El RassyNo ratings yet
- Approximate Cech ComplexesDocument19 pagesApproximate Cech Complexesvanessita578No ratings yet
- Symmetry-PPT-II-2022 - Copy1Document25 pagesSymmetry-PPT-II-2022 - Copy1myneed366No ratings yet
- Finite Control Volume AnalysisDocument31 pagesFinite Control Volume AnalysisOmer AbdullahNo ratings yet
- Leaching Apparatus Experimental ManualDocument12 pagesLeaching Apparatus Experimental ManualShoaib PathanNo ratings yet
- Flash Calc 3Document16 pagesFlash Calc 3Mohamed MamdouhNo ratings yet
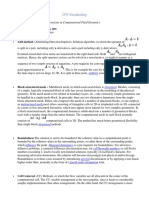
- CFD VocabularyDocument10 pagesCFD VocabularyAmir LachrafNo ratings yet
- Fundamentals of Fluid Mechanics: Chapter 5: Mass, Bernoulli, and Energy EquationsDocument57 pagesFundamentals of Fluid Mechanics: Chapter 5: Mass, Bernoulli, and Energy EquationsHabtamu Tkubet EbuyNo ratings yet
- Rigorous Distillation Dynamics SimulationsDocument10 pagesRigorous Distillation Dynamics SimulationsAhmed ShaepNo ratings yet
- ScalarDocument22 pagesScalarVinay GuptaNo ratings yet
- Mass Transfer Slides - CHE304 - Chapter 23Document53 pagesMass Transfer Slides - CHE304 - Chapter 23RehabNo ratings yet
- High-Order Central ENO Finite-Volume Scheme With Adaptive Mesh Refinement For The Advection-Diffusion EquationDocument7 pagesHigh-Order Central ENO Finite-Volume Scheme With Adaptive Mesh Refinement For The Advection-Diffusion EquationAdriana SterlingNo ratings yet
- Computational Aerodynamics: Name:Akhil Raj - Awale ROLL NO:17951A2105Document15 pagesComputational Aerodynamics: Name:Akhil Raj - Awale ROLL NO:17951A2105Jaikar Jaikar RahulNo ratings yet
- Prepared by Md. Ismail Firoz: Dept. of Geography & Environmental Studies (RU)Document19 pagesPrepared by Md. Ismail Firoz: Dept. of Geography & Environmental Studies (RU)ভোরের তারাNo ratings yet
- Level Set Method: Advancing Computer Vision, Exploring the Level Set MethodFrom EverandLevel Set Method: Advancing Computer Vision, Exploring the Level Set MethodNo ratings yet
- C++ Code Design For Multi-Purpose Explicit Finite Volume Methods: Requirements and SolutionsDocument8 pagesC++ Code Design For Multi-Purpose Explicit Finite Volume Methods: Requirements and SolutionsThierry Gnasiri Godwe HinsouNo ratings yet
- SELFE Users Trainng Course - (1) SELFE Physical Formulation: Joseph Zhang, CMOP, OHSUDocument34 pagesSELFE Users Trainng Course - (1) SELFE Physical Formulation: Joseph Zhang, CMOP, OHSUThierry Gnasiri Godwe HinsouNo ratings yet
- FVM Crash IntroDocument202 pagesFVM Crash IntroThierry Gnasiri Godwe HinsouNo ratings yet
- Advanced Turbulence1Document81 pagesAdvanced Turbulence1Thierry Gnasiri Godwe HinsouNo ratings yet
- Name and Surname Date and Place of Birth Nationality: Cameroonian Civil Status: Single Gender: Male Mobile: (+237) 76479985 EmailDocument3 pagesName and Surname Date and Place of Birth Nationality: Cameroonian Civil Status: Single Gender: Male Mobile: (+237) 76479985 EmailThierry Gnasiri Godwe HinsouNo ratings yet
- Polymers: Effect of Polymer Degradation On Polymer Flooding in Heterogeneous ReservoirsDocument25 pagesPolymers: Effect of Polymer Degradation On Polymer Flooding in Heterogeneous ReservoirsThierry Gnasiri Godwe HinsouNo ratings yet
- Flowline Products and Services: World Proven Chiksan and Weco EquipmentDocument15 pagesFlowline Products and Services: World Proven Chiksan and Weco Equipmentcanales117No ratings yet
- David Yu Zhang - Dynamic DNA Strand Displacement CircuitsDocument290 pagesDavid Yu Zhang - Dynamic DNA Strand Displacement CircuitsCogsmsNo ratings yet
- Compilation 1,2,3Document7 pagesCompilation 1,2,3Kharolina BautistaNo ratings yet
- Oily Water Separator RWO-COMDocument6 pagesOily Water Separator RWO-COMSea Man MktNo ratings yet
- AT Command Reference Guide PDFDocument196 pagesAT Command Reference Guide PDFDavid MoreirasNo ratings yet
- L7 Distance Measurement Nautical MileDocument9 pagesL7 Distance Measurement Nautical MileMoamen AbdienNo ratings yet
- WM DFJD ZVSR 3 Pu S0 Ym T9 WDocument19 pagesWM DFJD ZVSR 3 Pu S0 Ym T9 WRangeNo ratings yet
- Master Thesis - Bottero Cristian (ZUT-ICAM)Document158 pagesMaster Thesis - Bottero Cristian (ZUT-ICAM)Mohammad NasreddineNo ratings yet
- Quantitative Notes: Learnfast Review and Tutorial Hub - Nmat ReviewerDocument2 pagesQuantitative Notes: Learnfast Review and Tutorial Hub - Nmat ReviewerEllah Gutierrez100% (1)
- Experiment 5: Factors Affecting Reaction Rate: Present Well: + 1 Point Clear Picture: + 1 Point Total 15 PointsDocument9 pagesExperiment 5: Factors Affecting Reaction Rate: Present Well: + 1 Point Clear Picture: + 1 Point Total 15 PointsĐạo QuangNo ratings yet
- A Review of Gravure Coating SystemsDocument7 pagesA Review of Gravure Coating SystemsHiba NaserNo ratings yet
- Adpcm-Hco PB 1 5 2Document2 pagesAdpcm-Hco PB 1 5 2Prabal VarshneyNo ratings yet
- Word Problems (Age)Document4 pagesWord Problems (Age)John Patrick LaspiñasNo ratings yet
- Cba-300-Series-Air VolumesDocument1 pageCba-300-Series-Air VolumesdamicesterNo ratings yet
- Luna Et Al. 2017 Superficie Auricular FinalDocument14 pagesLuna Et Al. 2017 Superficie Auricular FinalConstanza Cáceres OrellanaNo ratings yet
- Matematicas Harmonics CathieDocument17 pagesMatematicas Harmonics CathieManuel Herrera50% (2)
- Activities Class VIII Month Prepared by RK SinghDocument5 pagesActivities Class VIII Month Prepared by RK SinghcuriousnavinNo ratings yet
- High Flyer 8Document4 pagesHigh Flyer 8Denisa MălăescuNo ratings yet
- Year 9 Revision Guide: Computer SystemsDocument4 pagesYear 9 Revision Guide: Computer SystemshelloNo ratings yet
- Bridon Dyform 34LR & 34LR PIDocument1 pageBridon Dyform 34LR & 34LR PIMardianNo ratings yet
- Lesson 1.3 - PracticeDocument2 pagesLesson 1.3 - PracticenanalagappanNo ratings yet
- Circuit Design For Low Power-HC17.T2P1Document49 pagesCircuit Design For Low Power-HC17.T2P1Phuc HoangNo ratings yet
- Summer Training Report - Ishan PatwalDocument21 pagesSummer Training Report - Ishan PatwalIshan PatwalNo ratings yet
- Lab Report On Cooling Tower: Performed byDocument9 pagesLab Report On Cooling Tower: Performed byramesh pokhrelNo ratings yet
- Ca - Syllabus - CBCS 2018Document33 pagesCa - Syllabus - CBCS 2018Abhay KumarNo ratings yet
- LAS GenPhysics1 MELC 4 Week 4.ADocument10 pagesLAS GenPhysics1 MELC 4 Week 4.AMonica SolomonNo ratings yet
- Unit 4 JavaDocument38 pagesUnit 4 JavautilgingerNo ratings yet
- Algorithm For Insertion in A Circular QueueDocument3 pagesAlgorithm For Insertion in A Circular QueuesatNo ratings yet
- AK98 Leaflet 4p A4 LowDocument3 pagesAK98 Leaflet 4p A4 LowJosé GómezNo ratings yet