You might also like
- Module 5Document17 pagesModule 5Pragati ShindeNo ratings yet
- A Project Seminar On: Design and Fabrication of Hybrid Electric BikeDocument19 pagesA Project Seminar On: Design and Fabrication of Hybrid Electric BikeNaziya TazeenNo ratings yet
- unit4. part 2Document20 pagesunit4. part 2mahato4120No ratings yet
- Fuel Cell Using Electrical VehicleDocument13 pagesFuel Cell Using Electrical VehiclevinayakaNo ratings yet
- A NovelDocument23 pagesA NovelKRISHNA REDDY KUPPIREDDYNo ratings yet
- A Novel Method of Designing Multifunctional Electrical VehicleDocument27 pagesA Novel Method of Designing Multifunctional Electrical VehicleSiva ForeviewNo ratings yet
- Chapter - 1Document39 pagesChapter - 1ritesh chauhanNo ratings yet
- TRN4582 1Document81 pagesTRN4582 1cyruswan156No ratings yet
- CompressorDocument178 pagesCompressor332-65 Nitin ShindeNo ratings yet
- Unit1 - Part2 - Design Aspects of EVs and HEVsDocument105 pagesUnit1 - Part2 - Design Aspects of EVs and HEVsChandru ChandruNo ratings yet
- Presentation1 rbsDocument14 pagesPresentation1 rbsSpoil KidNo ratings yet
- Transmission System of Hev'sDocument29 pagesTransmission System of Hev'sVaibhav KirtiwarNo ratings yet
- Milestone 2.tuesdayDocument57 pagesMilestone 2.tuesdayg45coupeNo ratings yet
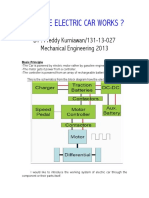
- How The Electric Car WorksDocument6 pagesHow The Electric Car WorksFreddy KurniawanNo ratings yet
- DOMDocument14 pagesDOMGAURAV BAGHELNo ratings yet
- A Study Into The True Life Cycle Costs of Electric Motors: 1.1 Project Motivations and Client InterestsDocument6 pagesA Study Into The True Life Cycle Costs of Electric Motors: 1.1 Project Motivations and Client Interestsemmanuel799No ratings yet
- The Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsDocument6 pagesThe Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsEdu Daryl MacerenNo ratings yet
- MPC For Battery Fuel Cell Hybrid VehicleDocument30 pagesMPC For Battery Fuel Cell Hybrid VehicleSab-Win DamadNo ratings yet
- Energy Management Strategy For A PHEVDocument6 pagesEnergy Management Strategy For A PHEVVignesh HegdeNo ratings yet
- PPT6 29thjulyDocument21 pagesPPT6 29thjulyChaudhari JainishNo ratings yet
- Unit 3Document23 pagesUnit 3Chandru ChandruNo ratings yet
- Electric MotorDocument40 pagesElectric MotorhmiwukcyNo ratings yet
- EV - Module 3-2 (1)Document59 pagesEV - Module 3-2 (1)prasadjunk90No ratings yet
- Regenerative Braking SystemDocument15 pagesRegenerative Braking SystemVinay KumarNo ratings yet
- AUTOMOTIVE SYSTEM DESIGN GROUP PROJECT PresentationDocument26 pagesAUTOMOTIVE SYSTEM DESIGN GROUP PROJECT PresentationRuston ImpellerNo ratings yet
- Module 2.1Document33 pagesModule 2.1RanjanaNo ratings yet
- Electric Car Seminar InsightsDocument18 pagesElectric Car Seminar InsightsMark67% (3)
- Chapter 5Document7 pagesChapter 5surendraNo ratings yet
- 5-Architecure of EV-24-Feb-2021Material - I - 24-Feb-2021 - 5 - EVDocument12 pages5-Architecure of EV-24-Feb-2021Material - I - 24-Feb-2021 - 5 - EVjayNo ratings yet
- Regenerative Braking StategyDocument10 pagesRegenerative Braking StategyAshwin SelvakumarNo ratings yet
- EV Component SelectionDocument8 pagesEV Component SelectionLalla ShuklaNo ratings yet
- Everything You Need to Know About Hybrid Electric VehiclesDocument19 pagesEverything You Need to Know About Hybrid Electric VehiclesShaurya DagarNo ratings yet
- Article StudyDocument16 pagesArticle StudymounaNo ratings yet
- Fuzzy Logic Control Based Regenerative Braking in Electric VehicleDocument3 pagesFuzzy Logic Control Based Regenerative Braking in Electric VehicleAnonymous KhhapQJVYtNo ratings yet
- ElectricscooterDocument4 pagesElectricscooterSurya AnjuNo ratings yet
- Bms With SocDocument15 pagesBms With SocPoojaNo ratings yet
- E3sconf SeFet2019 01029Document6 pagesE3sconf SeFet2019 01029DONE AND DUSTEDNo ratings yet
- m11 13 06Document6 pagesm11 13 06Bertalan Gyuszi KristófNo ratings yet
- EHV Module IDocument92 pagesEHV Module IArun ShobyNo ratings yet
- Ford Lincoln Hibryd2012 PDFDocument135 pagesFord Lincoln Hibryd2012 PDFgusradegondNo ratings yet
- Fuzzy Logic Based Energy Management System For Hybrid Electric VehicleDocument22 pagesFuzzy Logic Based Energy Management System For Hybrid Electric VehicleZeyad Tareq Al SaroriNo ratings yet
- Literature Review of BLDCDocument6 pagesLiterature Review of BLDCsushil63666No ratings yet
- Unit 2 - Part1 - Design of Hybrid Drive TrainDocument27 pagesUnit 2 - Part1 - Design of Hybrid Drive TrainChandru ChandruNo ratings yet
- LocoDocument28 pagesLocosuvratNo ratings yet
- Minor Project Updated 2Document13 pagesMinor Project Updated 2Uma MaheshNo ratings yet
- Regenerative suspension system converts bumps to electricityDocument13 pagesRegenerative suspension system converts bumps to electricityUma MaheshNo ratings yet
- Theme Project PresentationDocument14 pagesTheme Project PresentationMail ManNo ratings yet
- Unit 5 EHV NotesDocument18 pagesUnit 5 EHV Notestsxggphh4xNo ratings yet
- Intodcution To EVTDocument82 pagesIntodcution To EVTSrinivasa Rao Sura100% (1)
- 12th Evaluation Ahmed Samy 17105552Document14 pages12th Evaluation Ahmed Samy 17105552Ahmed Samy El GoharyNo ratings yet
- Shymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsDocument6 pagesShymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsADRIANSF1No ratings yet
- Title of The Project: Pragati Engineering College (Autonomous)Document13 pagesTitle of The Project: Pragati Engineering College (Autonomous)Lucky AbhiNo ratings yet
- 2010 Ford Hybrid OBD II PDFDocument108 pages2010 Ford Hybrid OBD II PDFYdelkadiasmela DominguezmorelNo ratings yet
- Development of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IDocument4 pagesDevelopment of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IKapish SharmaNo ratings yet
- Train Lighting System and Power Generation .Document24 pagesTrain Lighting System and Power Generation .sushmaNo ratings yet
- Modeling and Simulation of EHV (402034MJ) : Unit 4: Electric Vehicle ConfigurationDocument90 pagesModeling and Simulation of EHV (402034MJ) : Unit 4: Electric Vehicle Configurationsagar kordeNo ratings yet
- Transmission CharacteristicsDocument6 pagesTransmission CharacteristicsRitesh Ranjan PatraNo ratings yet
- Regenerative Braking in Electric Vehicle 2Document51 pagesRegenerative Braking in Electric Vehicle 2Subham Datta100% (1)
- Evaluation_of_Regenerative_Braking_and_its_Functionality_in_Electric_VehiclesDocument6 pagesEvaluation_of_Regenerative_Braking_and_its_Functionality_in_Electric_VehiclesDEBARATI DAMNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Suparco+ KRL Test Ques For Electrical EngrzDocument5 pagesSuparco+ KRL Test Ques For Electrical Engrzمحمد فصیح آفتابNo ratings yet
- b1600IEC PDFDocument36 pagesb1600IEC PDFGeancarlo RamosNo ratings yet
- Electric Field and Flux ReviewDocument20 pagesElectric Field and Flux ReviewJinja DelNo ratings yet
- Solis 1P (1 5K) 4G - V1Document24 pagesSolis 1P (1 5K) 4G - V1Jhasper ManagyoNo ratings yet
- Unit - Iv Urban Conservation: Principles and ObjectivesDocument4 pagesUnit - Iv Urban Conservation: Principles and ObjectivesManiMannan100% (1)
- 160DLC Excavator Repair PDFDocument406 pages160DLC Excavator Repair PDFlebon00100% (4)
- Neles Seat Leakage SpecDocument9 pagesNeles Seat Leakage SpecIkhsan Ly100% (1)
- A New Sensorless Hybrid MPPT Algorithm Based On Fractional Short-Circuit Current Measurement and P&O MPPTDocument9 pagesA New Sensorless Hybrid MPPT Algorithm Based On Fractional Short-Circuit Current Measurement and P&O MPPTTrần Đình ChiếnNo ratings yet
- Masterformat - 2018 - Web 1Document1 pageMasterformat - 2018 - Web 1Đặng Thành NhânNo ratings yet
- Fundamental Principles of DryingDocument32 pagesFundamental Principles of DryingSaber Chemkhi100% (1)
- Rr210205 Electro Mechanics IDocument8 pagesRr210205 Electro Mechanics ISrinivasa Rao GNo ratings yet
- ME 346: Heat Transfer: Instructor: Ankit JainDocument29 pagesME 346: Heat Transfer: Instructor: Ankit JainDeepankar Sakya KusumaNo ratings yet
- Some Recent Development in Mud Analysis LoggingDocument13 pagesSome Recent Development in Mud Analysis LoggingЕлнур ИкимбаевNo ratings yet
- Lennox - Mini Split - 17SEER - 9K - HP - SubmittalDocument3 pagesLennox - Mini Split - 17SEER - 9K - HP - SubmittalJose Baez C.No ratings yet
- Designing Interior Architecture 1-99Document100 pagesDesigning Interior Architecture 1-99Amit Damari100% (3)
- Kyocera Fsc5100dn Fsc5200dn Fsc5300dn Parts & ServiceDocument227 pagesKyocera Fsc5100dn Fsc5200dn Fsc5300dn Parts & ServiceandybruceNo ratings yet
- Turbo Case Study 14Document15 pagesTurbo Case Study 14atenciaj100% (3)
- Manual de Usuario Hidrolavadora Series DB 2323, 2324, 2527, 3030, 3835, 3540Document19 pagesManual de Usuario Hidrolavadora Series DB 2323, 2324, 2527, 3030, 3835, 3540RAUL CAVITANo ratings yet
- Annual Report 2021-2022 - BaplcDocument46 pagesAnnual Report 2021-2022 - BaplcOperation ShadowNo ratings yet
- St Paul School Chemistry Project on Measuring SolubilityDocument16 pagesSt Paul School Chemistry Project on Measuring SolubilityASHU KNo ratings yet
- Ts 1500Document2 pagesTs 1500cesar yunkeraNo ratings yet
- Updates On The Geothermal Energy Development in The PhilippinesDocument5 pagesUpdates On The Geothermal Energy Development in The PhilippinesHarold SumagaysayNo ratings yet
- Well Test Course NotesDocument522 pagesWell Test Course NotesBulan BintangNo ratings yet
- Ge Generator Short Circuit CharachteristicsDocument120 pagesGe Generator Short Circuit CharachteristicsEoin O'MahoneyNo ratings yet
- ElectromagneticsDocument84 pagesElectromagneticsLex FrancisNo ratings yet
- Dew Journal Editorial CalenderDocument4 pagesDew Journal Editorial CalenderALOK RANJANNo ratings yet
- Two Phase Flow and Heat Transfer - Assignment 3Document11 pagesTwo Phase Flow and Heat Transfer - Assignment 3Joel Jr Rudinas (Remodulator)No ratings yet
- UNIT 5 - Special MachinesDocument33 pagesUNIT 5 - Special MachinesKapilachander ThangavelNo ratings yet
- Skid Vibration ProblemsDocument16 pagesSkid Vibration ProblemsarturomNo ratings yet
- 01sep Ramakdawala PDFDocument137 pages01sep Ramakdawala PDFdev burmanNo ratings yet