You might also like
- Aesd QP SolDocument26 pagesAesd QP Sollaxmi shindeNo ratings yet
- CHAPTER 3 - 1 - Ver2-Intro To Assembly Language PDFDocument34 pagesCHAPTER 3 - 1 - Ver2-Intro To Assembly Language PDFWeehao Siow100% (1)
- What Is A Microprocessor?: - Computer's Central Processing Unit (CPU) Built On A SingleDocument74 pagesWhat Is A Microprocessor?: - Computer's Central Processing Unit (CPU) Built On A SingleDarren Sherwin KennyNo ratings yet
- Acorn RISC MachineDocument6 pagesAcorn RISC Machinesolomon girmaNo ratings yet
- ArmDocument203 pagesArmJannathul Firdous MohamedNo ratings yet
- MPMC Unit 4Document23 pagesMPMC Unit 4KvnsumeshChandraNo ratings yet
- The Acorn RISC Machine (ARM)Document12 pagesThe Acorn RISC Machine (ARM)Vikas SinghNo ratings yet
- Development of The ARM ArchitectureDocument44 pagesDevelopment of The ARM ArchitectureDwaraka OrugantiNo ratings yet
- 8051 Assembly Language ProgrammingDocument51 pages8051 Assembly Language ProgrammingVishal Gudla NagrajNo ratings yet
- ARM1Document40 pagesARM1Dwaraka OrugantiNo ratings yet
- Unit-4 Arm ArchitectureDocument71 pagesUnit-4 Arm ArchitectureChandu81870gmail.com KayithiNo ratings yet
- 4 - 3 - Modified - Code GenerationDocument31 pages4 - 3 - Modified - Code GenerationAkula SandeepNo ratings yet
- 04 8051 Instruction SetDocument76 pages04 8051 Instruction SetharinkhedetNo ratings yet
- Lecture1 2Document21 pagesLecture1 2da_oakNo ratings yet
- Unit One NotesDocument92 pagesUnit One NotesbharathimmkNo ratings yet
- Chapter 2 - Architecture of ARM ProcessorDocument43 pagesChapter 2 - Architecture of ARM Processor方勤No ratings yet
- Lecture6 ARMDocument50 pagesLecture6 ARMRohith ThurlapatiNo ratings yet
- Implementation of A 16-Bit RISC Processor Using FPGA ProgrammingDocument25 pagesImplementation of A 16-Bit RISC Processor Using FPGA ProgrammingTejashree100% (3)
- Microprocessor PDFDocument30 pagesMicroprocessor PDFAmy OliverNo ratings yet
- Microcontroller - PeresentationDocument85 pagesMicrocontroller - Peresentationkoponb107No ratings yet
- ARM - Advanced RISC Machines: RISC-Reduce Instruction Set ComputersDocument60 pagesARM - Advanced RISC Machines: RISC-Reduce Instruction Set ComputersPraveen EdulaNo ratings yet
- ARM ArchitectureDocument6 pagesARM ArchitectureCarlos AraujoNo ratings yet
- Topic 3 Processor FunctionDocument52 pagesTopic 3 Processor FunctionTharinda LasithaNo ratings yet
- Advanced RISC Machine-ARM Notes BhurchandiDocument8 pagesAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariNo ratings yet
- AVR Architecture and ApplicationDocument29 pagesAVR Architecture and Applicationhefawoj62No ratings yet
- System Software - Unit IDocument77 pagesSystem Software - Unit IJASPER WESSLYNo ratings yet
- ARM: An Advanced MicrocontrollerDocument54 pagesARM: An Advanced MicrocontrollershubhamNo ratings yet
- Power PCDocument50 pagesPower PCramu497No ratings yet
- Microcontroller Notes MODULE 1Document49 pagesMicrocontroller Notes MODULE 1Sri Janani100% (2)
- l18 ArmDocument71 pagesl18 ArmVamsi SomisettyNo ratings yet
- 722.file Ref.811.1632Document38 pages722.file Ref.811.1632Razdrizal Rizki ErmahriNo ratings yet
- Architecture of Computers Lab1Document28 pagesArchitecture of Computers Lab1q5nfvkbyyrNo ratings yet
- AVR MicrocontrollersDocument38 pagesAVR Microcontrollerspaku deyNo ratings yet
- ARM7 - LPC 2148 ProcessorDocument50 pagesARM7 - LPC 2148 ProcessorHong ShaeNo ratings yet
- Electrical NotesDocument27 pagesElectrical NotesshubhamNo ratings yet
- Cod Unit 2Document44 pagesCod Unit 2anilNo ratings yet
- COD Unit 2 PDFDocument49 pagesCOD Unit 2 PDFYash Gupta MauryaNo ratings yet
- Efficient C Coding For AVRDocument15 pagesEfficient C Coding For AVRapi-3740925No ratings yet
- ch2 Arm 1Document37 pagesch2 Arm 1Anonymous 4Ck3aR0No ratings yet
- Lecture 3Document88 pagesLecture 3Hemanth KumarNo ratings yet
- Instruction TypesDocument8 pagesInstruction Typestp2006sterNo ratings yet
- Arm Assembly TutorialDocument85 pagesArm Assembly TutorialZhennan Wang100% (1)
- 8051 MicrocontrollerDocument32 pages8051 MicrocontrollerRachit Sharma91% (11)
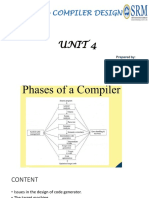
- 15Cs314J - Compiler Design: Unit 4Document71 pages15Cs314J - Compiler Design: Unit 4axar kumarNo ratings yet
- Unit 5 NotesDocument34 pagesUnit 5 NotesNimmagadda Chandra PaulNo ratings yet
- ARM 1vDocument31 pagesARM 1vsuntosh_14No ratings yet
- ARM 4 Part2Document9 pagesARM 4 Part2SUGYAN ANAND MAHARANANo ratings yet
- 8051 MicrocontrolllerDocument296 pages8051 MicrocontrolllerAniket BabutaNo ratings yet
- Ee6008 MBSD Eee Viist Au Unit IV PDFDocument10 pagesEe6008 MBSD Eee Viist Au Unit IV PDFBala MuruganNo ratings yet
- DCD, LDRDocument60 pagesDCD, LDRprasannashivanandmalagund0% (1)
- Fundamentals of Processor Design: Using Figures From by Hamblen and FurmanDocument35 pagesFundamentals of Processor Design: Using Figures From by Hamblen and Furmanwilliamjamir2295No ratings yet
- Tutorials: Introduction To Arm Processors: A Bit of ARM HistoryDocument3 pagesTutorials: Introduction To Arm Processors: A Bit of ARM HistoryMohammed Siyad BNo ratings yet
- Embedded Systems Design Part1Document61 pagesEmbedded Systems Design Part1arihant raj singhNo ratings yet
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set ArchitecturebalaNo ratings yet
- Lec 7Document17 pagesLec 7Prateek GoyalNo ratings yet
- Unit 2 CaoDocument8 pagesUnit 2 CaoZamal AhmedNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Assembly Programming:Simple, Short, And Straightforward Way Of Learning Assembly LanguageFrom EverandAssembly Programming:Simple, Short, And Straightforward Way Of Learning Assembly LanguageRating: 5 out of 5 stars5/5 (1)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- FUJITSU Mainboard D3642-B ATX: Data SheetDocument7 pagesFUJITSU Mainboard D3642-B ATX: Data SheetMUSIC ELECNo ratings yet
- Desigo PX PXM20 Operator Unit: User's GuideDocument76 pagesDesigo PX PXM20 Operator Unit: User's GuideEng M ElseaidyNo ratings yet
- Computer Software: SAK3002 - Information Technology and Its ApplicationDocument58 pagesComputer Software: SAK3002 - Information Technology and Its ApplicationMadarwi SarwaNo ratings yet
- Gaisano Interpace Computer Systems: Intel ProcessorsDocument2 pagesGaisano Interpace Computer Systems: Intel ProcessorsMawidan MudraNo ratings yet
- Practical Task SESSION 1 DFC10033.1662349265782Document9 pagesPractical Task SESSION 1 DFC10033.1662349265782PT20622 Divyaahsri Ap RaguNo ratings yet
- KVM - Video GPU Passthrough - 03Document4 pagesKVM - Video GPU Passthrough - 03nenhummailNo ratings yet
- WinAC RTX Overview eDocument72 pagesWinAC RTX Overview eDaniel Pérez MontielNo ratings yet
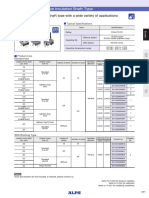
- EC12E EC12D: 12mm Size Insulated Shaft TypeDocument6 pagesEC12E EC12D: 12mm Size Insulated Shaft TypeAndy DanteNo ratings yet
- Parts Catalog A193/A224: PN: RCPC0200Document207 pagesParts Catalog A193/A224: PN: RCPC0200italo PGLNo ratings yet
- Robby TestDocument16 pagesRobby TestvsigalinggingNo ratings yet
- CompArch CH 1 1Document23 pagesCompArch CH 1 1Esuyawkal AdugnaNo ratings yet
- Jasper Overview Feb2023Document30 pagesJasper Overview Feb2023Huy VươngNo ratings yet
- Ubuntu For Raspberry PiDocument4 pagesUbuntu For Raspberry PisandeepNo ratings yet
- Lecture 3: Memory Buffers and SchedulingDocument21 pagesLecture 3: Memory Buffers and SchedulingGere TassewNo ratings yet
- Biostar A320mh Pro SpecDocument4 pagesBiostar A320mh Pro Specluiscarlos-21No ratings yet
- Gigabyte G1.Sniper H6 Rev 1.0Document36 pagesGigabyte G1.Sniper H6 Rev 1.0謝紳泳No ratings yet
- My DataDocument32 pagesMy DataJakeNo ratings yet
- Parts Diagram DUB182ZDocument2 pagesParts Diagram DUB182ZjorgeNo ratings yet
- ARM Interview QuestionsDocument17 pagesARM Interview QuestionsSahil Khan0% (1)
- Microcontroller Fundamental and ProgrammingDocument14 pagesMicrocontroller Fundamental and ProgrammingRohit SaindaneNo ratings yet
- Unit-II: Assembling and Disassembling A PCDocument35 pagesUnit-II: Assembling and Disassembling A PCNavi KaurNo ratings yet
- Manuale Service ML Em9250 Em9350 4-119446B 05-2018 en PDFDocument50 pagesManuale Service ML Em9250 Em9350 4-119446B 05-2018 en PDFJuan Fernando Domínguez TapiaNo ratings yet
- 01a EBO 2022 Architecture v06 HANDOUTDocument19 pages01a EBO 2022 Architecture v06 HANDOUTWalter BarbaNo ratings yet
- Acer Aspire S3-951 WISTRON Hummingbird1 HRDocument102 pagesAcer Aspire S3-951 WISTRON Hummingbird1 HRholinsunNo ratings yet
- House of Quality For Laptop PDFDocument1 pageHouse of Quality For Laptop PDFelvitaNo ratings yet
- ToshibaStorageDiagnosticTool Manual V03 ENG EU 0228Document20 pagesToshibaStorageDiagnosticTool Manual V03 ENG EU 0228anamaya7No ratings yet
- TS-853DU-RP-4G (Legacy)Document2 pagesTS-853DU-RP-4G (Legacy)Nour Ben SlamaNo ratings yet
- t200 - t680 Replace LCMDocument12 pagest200 - t680 Replace LCMvcalderonvNo ratings yet
- Aravind Devan - For Sr. WAN - Wipro - Chennai - Total 8 YearsDocument3 pagesAravind Devan - For Sr. WAN - Wipro - Chennai - Total 8 YearskkNo ratings yet
- Using The 6V2100 Multitach and 6V3121 Multitach Group (0775)Document26 pagesUsing The 6V2100 Multitach and 6V3121 Multitach Group (0775)Jm KamachoNo ratings yet