You might also like
- Mechanics of Materials IV:: Deflections, Buckling, Combined Loading, & Failure TheoriesDocument13 pagesMechanics of Materials IV:: Deflections, Buckling, Combined Loading, & Failure TheoriesFaryal BatoolNo ratings yet
- Fourier Transform Tables FDocument1 pageFourier Transform Tables FIBRAHIM ALFARISNo ratings yet
- FlexibilityDocument51 pagesFlexibilityصلوحي الووحشNo ratings yet
- AlexanderCh18final R1Document19 pagesAlexanderCh18final R1utpNo ratings yet
- Shigleys Mechanical Engineering Design 1-723-724Document2 pagesShigleys Mechanical Engineering Design 1-723-724wildan fauzanNo ratings yet
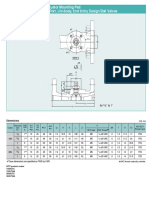
- FBV 2Document1 pageFBV 2pgltuNo ratings yet
- Chapter 3 - Analysis and Transmission of SignalsDocument53 pagesChapter 3 - Analysis and Transmission of SignalsIBRAHIM ALFARISNo ratings yet
- G 10t G 10t: 20 - For Anchor Bolt M1 6Document1 pageG 10t G 10t: 20 - For Anchor Bolt M1 6ikkeNo ratings yet
- M55.781142 MASTER Operation Tags Certification and Verification Plan Form XXXXXDocument1 pageM55.781142 MASTER Operation Tags Certification and Verification Plan Form XXXXXJean RaminhoNo ratings yet
- 2-For Flow SystemDocument4 pages2-For Flow Systemنزار الدهاميNo ratings yet
- 2011 MOW 323 Semester Test 2 MemoDocument12 pages2011 MOW 323 Semester Test 2 MemopoppyNo ratings yet
- ExercisesInClass 2 PDF Eng 20190914Document3 pagesExercisesInClass 2 PDF Eng 20190914TOAN DuNo ratings yet
- Engineering Mechanics: 5/10, Friday 3-4amDocument11 pagesEngineering Mechanics: 5/10, Friday 3-4amAlexander gregorius AgungNo ratings yet
- Roll No Name P.O.A English B.MATH ECO Urdu ISL P.O.C Civics Total % GradeDocument4 pagesRoll No Name P.O.A English B.MATH ECO Urdu ISL P.O.C Civics Total % GrademajidNo ratings yet
- Jaringan KerjaDocument4 pagesJaringan KerjaDyahNo ratings yet
- The La S of Motion: Field Forces Contact ForcesDocument19 pagesThe La S of Motion: Field Forces Contact Forcesp_k_soni_iit_physicsNo ratings yet
- Signals and Systems For Signals and Systems ForDocument106 pagesSignals and Systems For Signals and Systems ForGandhi NapitupuluNo ratings yet
- EN2090 Engineering Mathematics 2 Fourier Analysis: Prof. Adrian Porch DR Yue ZhouDocument17 pagesEN2090 Engineering Mathematics 2 Fourier Analysis: Prof. Adrian Porch DR Yue ZhouGhulam MujtabaNo ratings yet
- Aits 2223 PT I Jeea TD Paper 2 SolDocument17 pagesAits 2223 PT I Jeea TD Paper 2 SolJustyn100% (1)
- Fistat 7 FD Dan AplikasinyaDocument11 pagesFistat 7 FD Dan AplikasinyaBilal El BariNo ratings yet
- Experiment 12Document2 pagesExperiment 12Prajwal Gautam100% (1)
- 201-03.4 Equilibrium of Particle (3D)Document44 pages201-03.4 Equilibrium of Particle (3D)Brck Heart's Aqil MubarakNo ratings yet
- Project Management Full CourseDocument20 pagesProject Management Full CourseMd. Abdul QuayumNo ratings yet
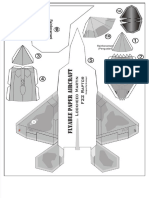
- Vdocuments - MX Flying-paper-f22-Raptor (1) Removed MergedDocument4 pagesVdocuments - MX Flying-paper-f22-Raptor (1) Removed MergedYousef AshrafNo ratings yet
- Chapter Four Signal and SystemsDocument21 pagesChapter Four Signal and SystemsTolesa ShoreNo ratings yet
- Ga02298 PertDocument7 pagesGa02298 PertiskandarbasiruddinNo ratings yet
- Keyboard Scan Codes: Set 2: 101-, 102-, and 104-Key KeyboardsDocument2 pagesKeyboard Scan Codes: Set 2: 101-, 102-, and 104-Key Keyboardsbadu51No ratings yet
- Signal FAQ22 SummaryDocument9 pagesSignal FAQ22 SummaryRubin VarugheseNo ratings yet
- All Signals in Nature Are in Continuous TimeDocument24 pagesAll Signals in Nature Are in Continuous TimeYousef BilbeisiNo ratings yet
- Fourier Series: Faculty of Electrical and Electronics EngineeringDocument60 pagesFourier Series: Faculty of Electrical and Electronics EngineeringDuc Anh NguyễnNo ratings yet
- Adamson University - Chemistry Department Computer Applications in ChemistryDocument3 pagesAdamson University - Chemistry Department Computer Applications in ChemistryXandra SamsonNo ratings yet
- Adamson University - Chemistry Department Computer Applications in ChemistryDocument3 pagesAdamson University - Chemistry Department Computer Applications in ChemistryXandra SamsonNo ratings yet
- Lotop (Document168 pagesLotop (Ims MiesNo ratings yet
- MPMC Lab 3Document5 pagesMPMC Lab 3SIDHARTH A NARAYANANNo ratings yet
- Tutorial 1 Solutions: CIVL2611 - Introductory Fluid Mechanics CIVL9611 - Introductory Fluid MechanicsDocument6 pagesTutorial 1 Solutions: CIVL2611 - Introductory Fluid Mechanics CIVL9611 - Introductory Fluid MechanicsBrian LinNo ratings yet
- Cable ElementDocument4 pagesCable Elementmidastutorials2023No ratings yet
- Toansfvfn - GG: Gcs S2Document9 pagesToansfvfn - GG: Gcs S2Muhammed MinhajNo ratings yet
- ME2112-Sem 1 AY1920-Exam-SoluDocument13 pagesME2112-Sem 1 AY1920-Exam-SoluCalvin ChiaNo ratings yet
- Chp4 SlidesDocument108 pagesChp4 Slideschristoalexw99No ratings yet
- Prokon Bending ScheduleDocument1 pageProkon Bending Schedulelolorek2No ratings yet
- Fbdof Sino Fac Two Force: Me 323: Mechanics of Materials Homework Set H03 Summer 2021Document2 pagesFbdof Sino Fac Two Force: Me 323: Mechanics of Materials Homework Set H03 Summer 2021Potatoes123No ratings yet
- Aits 2324 PT I Jeea Paper 1 SolDocument13 pagesAits 2324 PT I Jeea Paper 1 Solshouryaswami6No ratings yet
- Lecture 14Document12 pagesLecture 14manimanipal2009No ratings yet
- Sectional View2Document1 pageSectional View2Anas OmarNo ratings yet
- EC210BLC Control Valve Sectional View2Document1 pageEC210BLC Control Valve Sectional View2Anas OmarNo ratings yet
- Giantslayer - 06 - Shadow of The Storm Tyrant - Interactive MapDocument5 pagesGiantslayer - 06 - Shadow of The Storm Tyrant - Interactive MapMarco CampusNo ratings yet
- 12SP Frames and Machines SampleProblemsDocument20 pages12SP Frames and Machines SampleProblemsSebastiàn RugelesNo ratings yet
- Engineering Mechanics: 5/10, Friday 3-4amDocument11 pagesEngineering Mechanics: 5/10, Friday 3-4amgundulpNo ratings yet
- Engineering Mechanics: 5/10, Friday 3-4amDocument11 pagesEngineering Mechanics: 5/10, Friday 3-4amRaj SoodaNo ratings yet
- Doubts Session 1 For TRS2Document12 pagesDoubts Session 1 For TRS2Yashas NNo ratings yet
- Apx. C Keyboard Scan/Character Codes AppendicesDocument8 pagesApx. C Keyboard Scan/Character Codes AppendicesАлексNo ratings yet
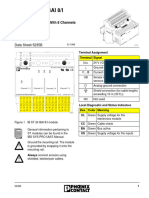
- Ib ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsDocument24 pagesIb ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsJosep Giménez CreixellNo ratings yet
- Project Managemnt - Delhi-6Document7 pagesProject Managemnt - Delhi-6khushi dalalNo ratings yet
- (@bohring - Bot) AITS 2324 PT I JEEA Paper 1 Sol (@HeyitsyashXD)Document13 pages(@bohring - Bot) AITS 2324 PT I JEEA Paper 1 Sol (@HeyitsyashXD)Garvit AhujaNo ratings yet
- Fundamentals of Digital Signal ProcessingDocument26 pagesFundamentals of Digital Signal ProcessingNini LashariNo ratings yet
- P1-TH-C3-1 He Luc Phang - English - Compatibility ModeDocument11 pagesP1-TH-C3-1 He Luc Phang - English - Compatibility ModeThành NhanNo ratings yet
- 04/07/17 Equilibrium of A Particle 1Document55 pages04/07/17 Equilibrium of A Particle 1Berkay SülenNo ratings yet
- Masud Rana - I Love You, Man#3 by Kazi Anwar HossainDocument70 pagesMasud Rana - I Love You, Man#3 by Kazi Anwar Hossainapi-26548429100% (1)
- 13-Cold Fusion and Gravitational EnergyDocument28 pages13-Cold Fusion and Gravitational EnergyMohammed Al-OdatNo ratings yet
- Renewable: EnergyDocument38 pagesRenewable: EnergyMohammed Al-OdatNo ratings yet
- 1.1 Energy and Society: Residential Transportation Commercial Industrial A Thought On Energy and GDPDocument12 pages1.1 Energy and Society: Residential Transportation Commercial Industrial A Thought On Energy and GDPMohammed Al-OdatNo ratings yet
- 4 Heat Transfer and StorageDocument16 pages4 Heat Transfer and StorageMohammed Al-OdatNo ratings yet
- 16 ObservationsDocument24 pages16 ObservationsMohammed Al-OdatNo ratings yet
- 1 - Introduction To Renewable EnergyDocument28 pages1 - Introduction To Renewable EnergyMohammed Al-OdatNo ratings yet
- 7-Salinity GradientDocument22 pages7-Salinity GradientMohammed Al-OdatNo ratings yet
- 8-Fuel CellsDocument28 pages8-Fuel CellsMohammed Al-OdatNo ratings yet
- Energy: W F D, Joule (J) Newton (N) Meter (M)Document26 pagesEnergy: W F D, Joule (J) Newton (N) Meter (M)Mohammed Al-OdatNo ratings yet
- Energy Conservation OutlineDocument8 pagesEnergy Conservation OutlineMohammed Al-OdatNo ratings yet
- 08 NuclearDocument62 pages08 NuclearMohammed Al-OdatNo ratings yet
- Wind Energy BasicsDocument33 pagesWind Energy BasicsShona Arum FNo ratings yet
- 17 FuelCellsDocument57 pages17 FuelCellsMohammed Al-OdatNo ratings yet
- Course Introduction Today's ClassDocument36 pagesCourse Introduction Today's ClassMohammed Al-OdatNo ratings yet
- Wind Turbine L9+L10 RevisedDocument111 pagesWind Turbine L9+L10 RevisedMohammed Al-OdatNo ratings yet
- CH 410 Summer 2009 Joe Musgrave and Ted Walker: WWW - Nrel.govDocument21 pagesCH 410 Summer 2009 Joe Musgrave and Ted Walker: WWW - Nrel.govAnnu BhatiaNo ratings yet
- Alternate Energy ActivitiesDocument15 pagesAlternate Energy ActivitiessebascianNo ratings yet
- Chemical & Physical Properties of Crude Oil: Module No. 4Document22 pagesChemical & Physical Properties of Crude Oil: Module No. 4Bipul Kumar PaulNo ratings yet
- Energy and EnvoiromentDocument38 pagesEnergy and EnvoiromentMohammed Al-OdatNo ratings yet
- Introduction To Wind Energy: James Mccalley Honors 322W, Wind Energy Honors SeminarDocument28 pagesIntroduction To Wind Energy: James Mccalley Honors 322W, Wind Energy Honors SeminarMohammed Al-OdatNo ratings yet
- Wind Turbine L25-L26 RevisedDocument137 pagesWind Turbine L25-L26 RevisedMohammed Al-OdatNo ratings yet
- Wind PowerDocument20 pagesWind PowerMohammed Al-OdatNo ratings yet
- Chpt8-Wind Turbine ControlDocument58 pagesChpt8-Wind Turbine ControlMohammed Al-OdatNo ratings yet
- Crude Oil CharacteristicsDocument13 pagesCrude Oil CharacteristicsMohammed Al-OdatNo ratings yet
- Fuel and Its Characteristics: Prof. Mohammed Al-OdatDocument43 pagesFuel and Its Characteristics: Prof. Mohammed Al-OdatMohammed Al-OdatNo ratings yet
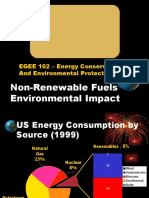
- Non-Renewable Fuels Environmental Impact: EGEE 102 - Energy Conservation and Environmental ProtectionDocument40 pagesNon-Renewable Fuels Environmental Impact: EGEE 102 - Energy Conservation and Environmental ProtectionAshager ShimelashNo ratings yet
- Combustion & Fossil FuelsDocument11 pagesCombustion & Fossil FuelsMohammed Al-OdatNo ratings yet
- Properties and Testing of CoalDocument13 pagesProperties and Testing of CoalMohammed Al-OdatNo ratings yet
- Part 6 - Energy From Fossil FuelsDocument34 pagesPart 6 - Energy From Fossil FuelsMohammed Al-OdatNo ratings yet
- Fuel and Its CharacteristicsDocument42 pagesFuel and Its CharacteristicsMohammed Al-OdatNo ratings yet
- CHAPTER 3 - Crystalline Structure of SolidsDocument63 pagesCHAPTER 3 - Crystalline Structure of SolidsAlex HunterNo ratings yet
- Base Plate IPE200 Fe250Document32 pagesBase Plate IPE200 Fe250Tejas SawantNo ratings yet
- Mechanical Engineering Hydraulic Mechanics Important MCQ PDFDocument11 pagesMechanical Engineering Hydraulic Mechanics Important MCQ PDFGaneshNo ratings yet
- AQA Physics - Learning Checklist - Module 12 - Turning Points in PhysicsDocument4 pagesAQA Physics - Learning Checklist - Module 12 - Turning Points in PhysicsCadet SikanderNo ratings yet
- Assigning R and SDocument12 pagesAssigning R and SApurba Sarker ApuNo ratings yet
- IBDP Yr1 Sem 1paper1Document3 pagesIBDP Yr1 Sem 1paper1RafiNo ratings yet
- AEMT Assignment1 2023Document2 pagesAEMT Assignment1 2023Sujay SNo ratings yet
- MA-05 Heat Balance CalculationDocument5 pagesMA-05 Heat Balance Calculationy ly thienNo ratings yet
- B SC Sem 6 Laser PhysicsDocument40 pagesB SC Sem 6 Laser Physicssatyachaudhuri47No ratings yet
- BFT Catalogue 2012 SMDocument199 pagesBFT Catalogue 2012 SMnoufalmindster0% (1)
- BS 2nd Shift Time Table Wef 11-12-2023 (1st, 5th, 7th Semester)Document3 pagesBS 2nd Shift Time Table Wef 11-12-2023 (1st, 5th, 7th Semester)Samar Ameen SialNo ratings yet
- Mcag14 & Mfac r6136b High Imp Rlys, 0Document12 pagesMcag14 & Mfac r6136b High Imp Rlys, 0smcraftNo ratings yet
- TVP Case Studies - Industrial Process HeatDocument6 pagesTVP Case Studies - Industrial Process HeatRahul SharmaNo ratings yet
- Distillation - Session 4Document8 pagesDistillation - Session 4atif irshadNo ratings yet
- 2N2369A Silicon NPN Transistor DescriptionDocument4 pages2N2369A Silicon NPN Transistor DescriptionReymondJosuéArgüelloRojasNo ratings yet
- Lecture - 1.1.9Document17 pagesLecture - 1.1.9akhil nigamNo ratings yet
- Sayem Homework 05 April 2020Document32 pagesSayem Homework 05 April 2020rafsun janiNo ratings yet
- EXP 4 - MaterialsDocument21 pagesEXP 4 - MaterialsLeslie CatindigNo ratings yet
- Bucket Elevator Calculation Rev 1Document8 pagesBucket Elevator Calculation Rev 1Irfan AhmedNo ratings yet
- Prev Year Questions: Chapter: TrigonometryDocument10 pagesPrev Year Questions: Chapter: TrigonometrySumit KumarNo ratings yet
- High Density ConcreteDocument14 pagesHigh Density Concreteer.praveenraj30No ratings yet
- GALA TEST CERTIFICATE Size 4Document1 pageGALA TEST CERTIFICATE Size 4dow cMNo ratings yet
- A Periodic Table of The Elements at Los Alamos National LaboratoryDocument3 pagesA Periodic Table of The Elements at Los Alamos National Laboratoryروشان فاطمة روشانNo ratings yet
- General Physics 1 Reviewer PDFDocument29 pagesGeneral Physics 1 Reviewer PDFJhon Robert ClavoNo ratings yet
- NIT Rourkela ME SyllabusDocument9 pagesNIT Rourkela ME SyllabusVisionateNo ratings yet
- Ligand: HistoryDocument1 pageLigand: HistorySyimah UmarNo ratings yet
- Cambridge International General Certificate of Secondary Education (9-1)Document20 pagesCambridge International General Certificate of Secondary Education (9-1)Pranav BISUMBHERNo ratings yet
- Design and Implementation of Push-Pull Converter Forrgb Led Lighting System-2Document7 pagesDesign and Implementation of Push-Pull Converter Forrgb Led Lighting System-2IAEME PublicationNo ratings yet
- Termoformadora de Bandeja SunWell M1370L-HTPF PainelDocument40 pagesTermoformadora de Bandeja SunWell M1370L-HTPF PainelGleicianeLimaGomesNo ratings yet
- 1atoms Molecules and StoichiometryDocument95 pages1atoms Molecules and StoichiometryNurfarhah JohariNo ratings yet