You might also like
- Automobile Service Management SystemDocument35 pagesAutomobile Service Management SystemDeepakshi Sinha58% (12)
- Programs With SolDocument28 pagesPrograms With SolSai Tejesh Reddy Gurijala71% (7)
- 8 - Load Test On Im1Document9 pages8 - Load Test On Im1anitha paramasivamNo ratings yet
- Machines Lab ManualDocument124 pagesMachines Lab ManualpurushothNo ratings yet
- Prosedur Percobaan Motor SinkronSinkron Generator SinkronDocument10 pagesProsedur Percobaan Motor SinkronSinkron Generator SinkronDara AmeliaNo ratings yet
- Load Test On Syn MotorDocument3 pagesLoad Test On Syn Motorbiki08226No ratings yet
- Induction Machines and Synchronous Machines Lab - Cycle 1Document20 pagesInduction Machines and Synchronous Machines Lab - Cycle 1SalmanNo ratings yet
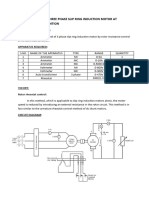
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDocument3 pagesSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Ac Voltage Controller Circuits: Unit-8Document49 pagesAc Voltage Controller Circuits: Unit-8Naeemo IraqiNo ratings yet
- Speed Control of 3 Phase Slip Ring Induction MotorDocument2 pagesSpeed Control of 3 Phase Slip Ring Induction Motoraditya aryaNo ratings yet
- Ac Voltage ControllersDocument11 pagesAc Voltage ControllersHemlata RaoNo ratings yet
- Experiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Document6 pagesExperiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Baba YagaNo ratings yet
- Electrical Machines II LAB MANUALDocument45 pagesElectrical Machines II LAB MANUALram kumarNo ratings yet
- Anna University Practical Lab Manuals For Engineering StudentsDocument13 pagesAnna University Practical Lab Manuals For Engineering StudentsTinku RathoreNo ratings yet
- Jobsheet 2 Mesin Sinkron 2019Document10 pagesJobsheet 2 Mesin Sinkron 2019Koko AhmadNo ratings yet
- Wa0002.Document2 pagesWa0002.aadityamahadik00No ratings yet
- Expt 6 The Cage Rotor Induction MotorDocument5 pagesExpt 6 The Cage Rotor Induction MotorRyan De GuzmanNo ratings yet
- Experiment No. 1 Schrage MotorDocument4 pagesExperiment No. 1 Schrage MotorAn00pgadzilla100% (2)
- List of Experiments To Be Perfomed in Cycle-2 of Ele412: Experiment-1: Circuit DiagramDocument4 pagesList of Experiments To Be Perfomed in Cycle-2 of Ele412: Experiment-1: Circuit DiagramManik PadhaNo ratings yet
- Machine - Lab Manual Merged PDFDocument14 pagesMachine - Lab Manual Merged PDFMubin LikhonNo ratings yet
- Exp 3Document4 pagesExp 3College ISMNo ratings yet
- ENEL280 AC Motor Control LabDocument5 pagesENEL280 AC Motor Control LabPatrick LustyNo ratings yet
- Electrical Machines-I IIIDocument55 pagesElectrical Machines-I IIIadityassripadaNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- 2 Lva1 App6891Document13 pages2 Lva1 App6891gouravNo ratings yet
- Beeel 1a2Document12 pagesBeeel 1a2Dr. S MuthukumarNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- Power Electronic (Pe) SystemDocument63 pagesPower Electronic (Pe) SystemFarid DafaNo ratings yet
- AC Motors PCIDocument30 pagesAC Motors PCIThomas DuNo ratings yet
- Module-3 (B) - AC Controllers - VII-POWER ELECTRONICS - 2015-17 SchemeDocument48 pagesModule-3 (B) - AC Controllers - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHINo ratings yet
- Speed Control of 3phase Induction MotorDocument3 pagesSpeed Control of 3phase Induction MotorSiddhant ShatàpathyNo ratings yet
- Rotor Exp1Document4 pagesRotor Exp1Andrei John EnriquezNo ratings yet
- Variable Frequency DriveDocument23 pagesVariable Frequency DriveSuraj BhushanNo ratings yet
- Variable Frequency DriveDocument23 pagesVariable Frequency DriveSuraj BhushanNo ratings yet
- Experiment No. 3 Transfer Function of Two Phase A. C. Servo MotorDocument3 pagesExperiment No. 3 Transfer Function of Two Phase A. C. Servo MotorSHIVAM KUMAR SINGHWALNo ratings yet
- 2 Machine LabDocument4 pages2 Machine LabManoj GuptaNo ratings yet
- Electrical Machines Lab: Experiment 2ADocument9 pagesElectrical Machines Lab: Experiment 2AARTI RAWATNo ratings yet
- Exp 1Document6 pagesExp 1College ISMNo ratings yet
- Servo MOTORDocument5 pagesServo MOTORLal Chand PooniaNo ratings yet
- Induction Motor Part-4Document34 pagesInduction Motor Part-4Jay PatelNo ratings yet
- s5 Lab Manual Full FinalDocument45 pagess5 Lab Manual Full FinalananyadeviashokkumarNo ratings yet
- Exp 5 DC Series MotorDocument5 pagesExp 5 DC Series MotorKlydeJoseNo ratings yet
- EE6512-Electrical Machines LaboratoryDocument82 pagesEE6512-Electrical Machines LaboratoryGopinath B L NaiduNo ratings yet
- Speed Control of Squirrel Cage Induction Machine Using V/F ControlDocument33 pagesSpeed Control of Squirrel Cage Induction Machine Using V/F ControlbibiNo ratings yet
- Speed Control of Induction MotorDocument33 pagesSpeed Control of Induction MotorMaham NaeemNo ratings yet
- InductionGenerator GridConnectedDocument2 pagesInductionGenerator GridConnectedtemp tempNo ratings yet
- Speed Control of Induction Motors - 2 PDFDocument22 pagesSpeed Control of Induction Motors - 2 PDFZariz ZakianNo ratings yet
- Lab Manual of ED Experiment - 5Document7 pagesLab Manual of ED Experiment - 5revanthreddy1863No ratings yet
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- Voltage Control With Using ThyristorDocument8 pagesVoltage Control With Using ThyristorAnucha YieNo ratings yet
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Power Semi Conductor DrivesDocument2 pagesPower Semi Conductor DrivesmanideepNo ratings yet
- PMSM 2012Document62 pagesPMSM 2012Sreerag Kunnathu Sugathan100% (3)
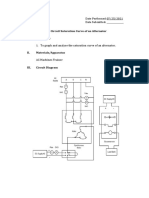
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- No Load and Block Rotor Test 3 PH Ind Motor DolDocument14 pagesNo Load and Block Rotor Test 3 PH Ind Motor DolalexNo ratings yet
- Motor PDFDocument9 pagesMotor PDFAbhishek SurinNo ratings yet
- 099 V Curves of Syn Motor With Elect Loading Dol Starter Without ExcitorDocument10 pages099 V Curves of Syn Motor With Elect Loading Dol Starter Without ExcitorNiket SurawaseNo ratings yet
- Electrical Engineering Lab Manual For II Mech Part IDocument54 pagesElectrical Engineering Lab Manual For II Mech Part IArivumani80% (5)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- ReadMe ENDocument2 pagesReadMe ENAlexandre GuerraNo ratings yet
- 3.1.2.7 Packet Tracer - Investigating A VLAN Implementation InstructionsDocument4 pages3.1.2.7 Packet Tracer - Investigating A VLAN Implementation InstructionsAndi PermanaNo ratings yet
- HSAJET Micron User ManualDocument28 pagesHSAJET Micron User ManualIntercomo DOONo ratings yet
- Linux Forensics Part 1Document6 pagesLinux Forensics Part 1SADRONUNo ratings yet
- Ex Ecm2Document4 pagesEx Ecm2rodruren01No ratings yet
- Components of Cloud Computing ArchitectureDocument4 pagesComponents of Cloud Computing ArchitectureNguyễn Việt HùngNo ratings yet
- ATV13 User Manual VECON PDFDocument126 pagesATV13 User Manual VECON PDFSuleyman OzyurtNo ratings yet
- Scala For Data Science - Sample ChapterDocument32 pagesScala For Data Science - Sample ChapterPackt PublishingNo ratings yet
- Mediana E30 E40Document6 pagesMediana E30 E40Luis AnzolaNo ratings yet
- New Method For Mobile Application Testing Using Lean Canvas To Improving The Test StrategyDocument4 pagesNew Method For Mobile Application Testing Using Lean Canvas To Improving The Test StrategyalejandraNo ratings yet
- LO3 Connect Hardware PeripheralsDocument12 pagesLO3 Connect Hardware PeripheralsAbela DrrsNo ratings yet
- Henri: Service ToolDocument33 pagesHenri: Service ToolChristian Neo OcayNo ratings yet
- Lab 2 ReportDocument9 pagesLab 2 ReportvenkateshNo ratings yet
- Data IN OUT - Tugas TML (Albyalbert-1Document76 pagesData IN OUT - Tugas TML (Albyalbert-1Marisa SarimiNo ratings yet
- Lab 12-NewDocument17 pagesLab 12-NewSumaira KhanNo ratings yet
- General Micro - Web Services Flashcards QuizletDocument20 pagesGeneral Micro - Web Services Flashcards QuizletganamNo ratings yet
- 10 Most Popular Tech Stacks For Software Development 2024Document5 pages10 Most Popular Tech Stacks For Software Development 2024k224827 Anum AkhtarNo ratings yet
- InstructionsDocument1 pageInstructionsLuska SoleiNo ratings yet
- Roscoe/Rje: Class ObjectivesDocument41 pagesRoscoe/Rje: Class ObjectivesFernando Toro AuspontNo ratings yet
- On Demand Default 2022 08 19 113014Document13 pagesOn Demand Default 2022 08 19 113014tonotorresborjasNo ratings yet
- Install Oracle Enterprise ManagerDocument15 pagesInstall Oracle Enterprise ManagerJENIFA JEYAKUMAR100% (1)
- An Introduction To Db::DocumentumDocument40 pagesAn Introduction To Db::Documentumjazarja100% (1)
- Ata 42 Ima & AdcnDocument20 pagesAta 42 Ima & Adcn이봉연No ratings yet
- SDCC - Small Device C CompilerDocument3 pagesSDCC - Small Device C Compileralberto55No ratings yet
- PB October 2017Document68 pagesPB October 2017Naim HasanNo ratings yet
- PG3 UserDocument18 pagesPG3 UserwilliambullickNo ratings yet
- Manual AM53 CASEDocument75 pagesManual AM53 CASEAlex BenaNo ratings yet
- McAfee VirusScan Enterprise 8.8.0 Patch 11Document8 pagesMcAfee VirusScan Enterprise 8.8.0 Patch 11jza_esNo ratings yet