You might also like
- Control SCR firing angle using gate resistorDocument12 pagesControl SCR firing angle using gate resistorplokplokplokNo ratings yet
- Tutorial 1 - Basic Concepts in Power ElectronicsDocument7 pagesTutorial 1 - Basic Concepts in Power ElectronicsJohn Appleseed100% (1)
- Svms User Manual: Answer Drives S.R.L. - Partially Owned by Ansaldo Sistemi Industriali - S.p.ADocument41 pagesSvms User Manual: Answer Drives S.R.L. - Partially Owned by Ansaldo Sistemi Industriali - S.p.AMohamed Alkharashy100% (1)
- 5.AC Phase Control Using SCRDocument8 pages5.AC Phase Control Using SCRabcdefgNo ratings yet
- Electro-Technique 2: TransformerDocument57 pagesElectro-Technique 2: TransformerAmmar Raman100% (1)
- DET40073 - Topic 2cDocument26 pagesDET40073 - Topic 2cKuhaanProNo ratings yet
- Single-Phase Full-Wave Rectifier GuideDocument79 pagesSingle-Phase Full-Wave Rectifier GuideKuhaanProNo ratings yet
- DC Motor Speed Control MethodsDocument53 pagesDC Motor Speed Control MethodsKuhaanProNo ratings yet
- DET40073 - Topic 4Document104 pagesDET40073 - Topic 4KuhaanPro100% (1)
- DET40073 - Topic 1Document54 pagesDET40073 - Topic 1KuhaanProNo ratings yet
- DET40073 - Topic 3Document97 pagesDET40073 - Topic 3KuhaanProNo ratings yet
- CH 3 - Controlled RectifiersDocument25 pagesCH 3 - Controlled RectifiersGebremichael Teklay GebretsadikNo ratings yet
- Tube Light ManualDocument2 pagesTube Light ManualSwaroop MallickNo ratings yet
- Effect of Source InductanceDocument25 pagesEffect of Source InductanceSriram Anil Kumar Gandham100% (1)
- Lect 32 33 CycloconverterDocument37 pagesLect 32 33 CycloconverterVishal MeghwarNo ratings yet
- Emeng 3131 Electrical Power Systems: Fundamentals of Power System Yoseph MekonnenDocument36 pagesEmeng 3131 Electrical Power Systems: Fundamentals of Power System Yoseph MekonnenmichaelNo ratings yet
- Single Phase InverterDocument29 pagesSingle Phase InverterEla ResearchNo ratings yet
- 02 Power ElectronicsDocument212 pages02 Power Electronicsmarkschurer223453No ratings yet
- InverterDocument53 pagesInverterAgus SetyawanNo ratings yet
- ECE 424: POWER ELECTRONICS II ASSIGNMENT (CAT 11Document2 pagesECE 424: POWER ELECTRONICS II ASSIGNMENT (CAT 11Amos Atandi0% (1)
- AC-DC Converter - DDocument39 pagesAC-DC Converter - DBishnu100% (1)
- Chapter 3 Transformer Connections, Operation, and Specialty TransformersDocument38 pagesChapter 3 Transformer Connections, Operation, and Specialty TransformersSihamaSihamNo ratings yet
- Three Phase ControlledDocument9 pagesThree Phase ControlledSaif HassanNo ratings yet
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDocument4 pages2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- Single Phase Current Transformer LabDocument6 pagesSingle Phase Current Transformer LabHumayun ArshadNo ratings yet
- What Is R.M.S (Root Mean Square) ?Document5 pagesWhat Is R.M.S (Root Mean Square) ?Muhammad UmairNo ratings yet
- Heaven's light guides polarity testDocument3 pagesHeaven's light guides polarity testAbdul Mubin100% (2)
- Impulse CommutationDocument9 pagesImpulse CommutationSobiNo ratings yet
- Slides For Multi Level Inverter in Psim PDFDocument41 pagesSlides For Multi Level Inverter in Psim PDFmuhammad saeedNo ratings yet
- Transformer PPT For First YearDocument42 pagesTransformer PPT For First YearDhairya PathakNo ratings yet
- 02 Power ElectronicsDocument213 pages02 Power Electronicsapi-19608934No ratings yet
- Mosfet Lab 1Document11 pagesMosfet Lab 1Pramod SnkrNo ratings yet
- Electrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Document5 pagesElectrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Danial AkramNo ratings yet
- Sect2-3 PDFDocument10 pagesSect2-3 PDFBlaiseNo ratings yet
- DC Ac ConverterDocument51 pagesDC Ac ConverteraswardiNo ratings yet
- Experiment 1 - Single Phase TransformerDocument9 pagesExperiment 1 - Single Phase TransformerKhairul Islam HimelNo ratings yet
- Step-Down Cycloconverter Explained - Electrical ConceptsDocument5 pagesStep-Down Cycloconverter Explained - Electrical ConceptsMohammad HamamdNo ratings yet
- Biasing Circuits of FETDocument10 pagesBiasing Circuits of FETMonica GunjalNo ratings yet
- Viper 12s Buck Boost ConverterDocument14 pagesViper 12s Buck Boost ConverterelkillyNo ratings yet
- LAB 2 Half Wave RectifierDocument1 pageLAB 2 Half Wave RectifiersyahmimisahfaniNo ratings yet
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- Step-Down Chopper Overview and ProceduresDocument4 pagesStep-Down Chopper Overview and ProceduresKsr AkhilNo ratings yet
- Multistage AmplifiersDocument22 pagesMultistage AmplifiersParvinder SinghNo ratings yet
- Half-Wave RectifierDocument21 pagesHalf-Wave RectifierMuhammad Anaz'sNo ratings yet
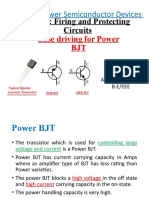
- Advanced Power BJT Base Driving CircuitsDocument16 pagesAdvanced Power BJT Base Driving CircuitsSachin SivaNo ratings yet
- BJT and Power Semiconductor DevicesDocument7 pagesBJT and Power Semiconductor DevicesHrishikesh TiwaryNo ratings yet
- Voltage Regulation in TransformerDocument6 pagesVoltage Regulation in TransformerRajat Tak100% (1)
- Matrix ConverterDocument17 pagesMatrix ConverterFatin RazakNo ratings yet
- Machine LabDocument7 pagesMachine LabNurjahan-Ara StudentNo ratings yet
- CYCLOCONVERTER TITLEDocument40 pagesCYCLOCONVERTER TITLEMD. SADEKUL ISLAM RIMON 1502084No ratings yet
- Two Point StarterDocument4 pagesTwo Point StarterudhayabarathiNo ratings yet
- 3 Phase Full Wave Bridge ConverterDocument55 pages3 Phase Full Wave Bridge ConvertersubhasishpodderNo ratings yet
- DC to AC Conversion Using InvertersDocument24 pagesDC to AC Conversion Using InvertersABHISHEK KUMARNo ratings yet
- Sheet 2-Circuit Magnetic PDFDocument14 pagesSheet 2-Circuit Magnetic PDFMarcos Silva MonteloNo ratings yet
- RMS voltage meaningDocument3 pagesRMS voltage meaningSuhaib_Faryad_5001No ratings yet
- 11 AC Voltage ControlDocument27 pages11 AC Voltage ControlmohamedNo ratings yet
- 6.rangkaian Dioda Update OkDocument37 pages6.rangkaian Dioda Update OkAbi PermanaNo ratings yet
- AC Voltage Control LectureDocument14 pagesAC Voltage Control LectureAbd El-Rahman DabbishNo ratings yet
- 12th Jee Em+Gm Ac, EmwDocument91 pages12th Jee Em+Gm Ac, EmwEeea EearNo ratings yet
- List of Formula - Eet505Document2 pagesList of Formula - Eet505LIEW HUI FANG UNIMAPNo ratings yet
- 10 - Alternating Current-01-TheoryDocument22 pages10 - Alternating Current-01-TheoryRaju SinghNo ratings yet
- DET40073 - Topic 3Document97 pagesDET40073 - Topic 3KuhaanProNo ratings yet
- DET40073 Topic 2aDocument78 pagesDET40073 Topic 2aHAAVINESHNo ratings yet
- DET40073 - Topic 4Document104 pagesDET40073 - Topic 4KuhaanPro100% (1)
- PW2 (06det20f1004 - 06det20f1055 - 06det20f1082) PDFDocument15 pagesPW2 (06det20f1004 - 06det20f1055 - 06det20f1082) PDFKuhaanProNo ratings yet
- PW2 (06det20f1004 - 06det20f1055 - 06det20f1082) PDFDocument15 pagesPW2 (06det20f1004 - 06det20f1055 - 06det20f1082) PDFKuhaanProNo ratings yet
- DET40073 - Topic 1Document54 pagesDET40073 - Topic 1KuhaanProNo ratings yet
- Simplify -2(5+p)+3p-1 step-by-step solutionDocument1 pageSimplify -2(5+p)+3p-1 step-by-step solutionKuhaanProNo ratings yet
- Presentation 1Document1 pagePresentation 1KuhaanProNo ratings yet
- Aqua Monitoring System Tracks Water QualityDocument8 pagesAqua Monitoring System Tracks Water QualityKuhaanProNo ratings yet
- Mathematics Form 2Document2 pagesMathematics Form 2Lovie131476% (21)
- 54 - (-8) + (-17) A) - 79 B) - 63 C) - 45 D) - 29: SolutionDocument1 page54 - (-8) + (-17) A) - 79 B) - 63 C) - 45 D) - 29: SolutionAmir FaisalNo ratings yet
- Chapter 5Document1 pageChapter 5cikguanuar60% (5)
- Chapter 1Document1 pageChapter 1cikguanuar90% (10)
- Bab 2Document1 pageBab 2Lee YengNo ratings yet
- HackingDocument1 pageHackingKuhaanProNo ratings yet
- HealtyDocument1 pageHealtyKuhaanProNo ratings yet
- New Microsoft PowerPoint PresentationDocument2 pagesNew Microsoft PowerPoint PresentationKuhaanProNo ratings yet
- A Theoretical Investigation of The Rectangular Microstrip Antenna ElementDocument4 pagesA Theoretical Investigation of The Rectangular Microstrip Antenna Elementdot41No ratings yet
- Exponential Moving AverageDocument7 pagesExponential Moving Averagehamid aslanovNo ratings yet
- Study ABCD Parameters Transmission LinesDocument14 pagesStudy ABCD Parameters Transmission LinesAbhishek VermaNo ratings yet
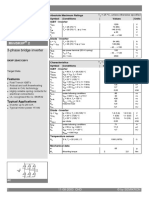
- Skiip 25Ac126V1: Miniskiip 2Document4 pagesSkiip 25Ac126V1: Miniskiip 2Max TeleNo ratings yet
- Solar ACDB and DCDB Box PricesDocument2 pagesSolar ACDB and DCDB Box PricesRakesh HateyNo ratings yet
- Diode circuit models voltage analysisDocument9 pagesDiode circuit models voltage analysisJean ChanNo ratings yet
- SM10LZ47: Ac Power Control ApplicationsDocument3 pagesSM10LZ47: Ac Power Control Applicationsmanuel riascosNo ratings yet
- RDK 131Document24 pagesRDK 131Zoran NesicNo ratings yet
- Adrv9008 1Document68 pagesAdrv9008 1doubleNo ratings yet
- A Combined Antijamming and Antispoofing Algorithm For GPS ArraysDocument10 pagesA Combined Antijamming and Antispoofing Algorithm For GPS ArraysMojtaba KhakiNo ratings yet
- Angle of Incidence and Reflection Intensity Through a PolarizerDocument23 pagesAngle of Incidence and Reflection Intensity Through a PolarizerSatyam GuptaNo ratings yet
- Dual Active Bridge Converter Based Battery Charger in Stand-Alone Wind Power Generation System With High-Inertia Wind TurbineDocument5 pagesDual Active Bridge Converter Based Battery Charger in Stand-Alone Wind Power Generation System With High-Inertia Wind TurbinemsmegovindNo ratings yet
- The Persistent Memory Connection: How To Attach PMEM in Computing Systems?Document23 pagesThe Persistent Memory Connection: How To Attach PMEM in Computing Systems?Jing XieNo ratings yet
- Combinada Convencional 8000 Serie 8040 Equipamento Electrico para Ford, Alfa Romeo, Fiat y Mercedes BenzDocument5 pagesCombinada Convencional 8000 Serie 8040 Equipamento Electrico para Ford, Alfa Romeo, Fiat y Mercedes BenzRamón ManglesNo ratings yet
- Siemon-Category6a Futp Cable International Spec-SheetDocument2 pagesSiemon-Category6a Futp Cable International Spec-SheetsrobayocNo ratings yet
- Nortroll - COMTROLL - ENGDocument14 pagesNortroll - COMTROLL - ENGnicolás_lorréNo ratings yet
- Abb Artu 2014Document404 pagesAbb Artu 2014haldrik5966No ratings yet
- Centric 50 KvaDocument85 pagesCentric 50 KvaAntónio BarrosNo ratings yet
- Testing Passive Optical Networks: FTTX Pon GuideDocument84 pagesTesting Passive Optical Networks: FTTX Pon GuideAnonymous 5Pzs8gpVQNo ratings yet
- Ict Study Notes Chapter 1-8Document7 pagesIct Study Notes Chapter 1-8faryal khanNo ratings yet
- Presentation of Overhauling CEP Motor-B Rev-1Document16 pagesPresentation of Overhauling CEP Motor-B Rev-1aminullahsharifNo ratings yet
- Semi-Custom ASIC Design of DDR2-Micron-MT47H32M16BN-37E SDRAM ControllerDocument2 pagesSemi-Custom ASIC Design of DDR2-Micron-MT47H32M16BN-37E SDRAM ControllerJoydeep SahaNo ratings yet
- Sony Kdl-32s3000 Kdl-40s3000 Kdl-46s3000 Wax3 Diagrama Service ManualDocument176 pagesSony Kdl-32s3000 Kdl-40s3000 Kdl-46s3000 Wax3 Diagrama Service Manualivancalderon867374No ratings yet
- VFD - AbbDocument24 pagesVFD - Abbapollobsl 1.7KNo ratings yet
- GTO 4060 and 2060 Power AmplifierDocument8 pagesGTO 4060 and 2060 Power AmplifierbayteluNo ratings yet
- Ultra Wideband Circuits GuideDocument206 pagesUltra Wideband Circuits Guidemotaznasser11750% (2)
- Montage Georgia ჯ. პაპაშვილის N19: As BuiltDocument7 pagesMontage Georgia ჯ. პაპაშვილის N19: As BuiltAna MosiashviliNo ratings yet
- ZTE ZXSDR B8200 Product DescriptionDocument31 pagesZTE ZXSDR B8200 Product Descriptionrdmiguel_1983685% (13)
- Analysis of DT Linear Invariant Systems Using ConvolutionDocument51 pagesAnalysis of DT Linear Invariant Systems Using ConvolutionReddy BabuNo ratings yet