You might also like
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Chapter - 2 - Mathematical Models of Systems - W2015Document75 pagesChapter - 2 - Mathematical Models of Systems - W2015120200421003nNo ratings yet
- Sliding Mode ControlDocument14 pagesSliding Mode ControlAsghar AliNo ratings yet
- DT Controller N ObserverDocument21 pagesDT Controller N ObserverPratiksha AnuragiNo ratings yet
- FEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Document36 pagesFEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Junaid YNo ratings yet
- Controller DesignDocument35 pagesController DesignOreste HernandezNo ratings yet
- Lecture 3 - 2Document42 pagesLecture 3 - 2faruktokuslu16No ratings yet
- MECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterDocument28 pagesMECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterOmar MalikNo ratings yet
- Lecture 1: Introduction To Control of Linear SystemsDocument60 pagesLecture 1: Introduction To Control of Linear SystemsSandeep K AugustineNo ratings yet
- 5.2 - Design Based On State SpaceDocument87 pages5.2 - Design Based On State SpaceMarceloNo ratings yet
- 1 Introduction To Control SystemsDocument47 pages1 Introduction To Control Systemsokay45486No ratings yet
- EE5205 Control System DesignDocument44 pagesEE5205 Control System DesignntbandaraNo ratings yet
- 6 - Design Based On Transfer FunctionDocument66 pages6 - Design Based On Transfer FunctionJosueNo ratings yet
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument37 pagesControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsSuyash Dahake VlogsNo ratings yet
- Lecture 1 2-IntroductionDocument36 pagesLecture 1 2-Introductionjanderson13No ratings yet
- CST 05Document76 pagesCST 05Sourav ChoubeyNo ratings yet
- Lecture 1Document59 pagesLecture 1iptradersNo ratings yet
- Mathematical Modeling of Control SystemDocument31 pagesMathematical Modeling of Control SystemMegiNo ratings yet
- Introduction To Non Linear SystemDocument34 pagesIntroduction To Non Linear SystemAnonymous 5DAuRtNo ratings yet
- Lecture 1 Non Linear ControlDocument21 pagesLecture 1 Non Linear ControlShivan BiradarNo ratings yet
- System Analysis in Control System1Document5 pagesSystem Analysis in Control System1PhanindraNo ratings yet
- ME330- spring-2022 Part 1 فصل الربيع 2022Document41 pagesME330- spring-2022 Part 1 فصل الربيع 2022saad SdNo ratings yet
- Properties of State VariablesDocument68 pagesProperties of State VariablesMona AliNo ratings yet
- Control System Engineering PPT by ShemsudinDocument42 pagesControl System Engineering PPT by ShemsudinShemsudin AhmedteibNo ratings yet
- DC DC BuckDc Buck Boost ConverterDocument6 pagesDC DC BuckDc Buck Boost Converterrkp369No ratings yet
- Principles of Measuring Instruments: Lecture TwoDocument91 pagesPrinciples of Measuring Instruments: Lecture TwoRenatus KatunduNo ratings yet
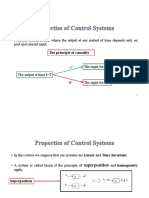
- A Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of CausalityDocument11 pagesA Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of Causalitygamer manNo ratings yet
- NMB34203 ch1 IntroDocument38 pagesNMB34203 ch1 IntrofatinNo ratings yet
- Pole Placement: Dr. Sadeq Al-MajidiDocument19 pagesPole Placement: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Introduction To Feedback and Control SystemsDocument26 pagesIntroduction To Feedback and Control SystemsSarah Santiago100% (3)
- Controllability and ObservabilityDocument20 pagesControllability and ObservabilityAya FlyahNo ratings yet
- LQRDocument34 pagesLQRkemoNo ratings yet
- Controllability and ObservabilityDocument20 pagesControllability and ObservabilityAya FlyahNo ratings yet
- Principles of Measuring Instruments - B: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Document82 pagesPrinciples of Measuring Instruments - B: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Renatus KatunduNo ratings yet
- Midterm Review Cds 101Document4 pagesMidterm Review Cds 101Cristhian DelgadoNo ratings yet
- Chapter 8 ControlDocument96 pagesChapter 8 ControlDESHMUKH ANKIT PRAKASHRAONo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- CS Chapter 8Document113 pagesCS Chapter 8Mynam MeghanaNo ratings yet
- PSG College of Technology: Department of Instrumentation and Control Systems EngineeringDocument14 pagesPSG College of Technology: Department of Instrumentation and Control Systems EngineeringAllanAnbuNo ratings yet
- Week 003 Frequency Response Transfer FunctionDocument18 pagesWeek 003 Frequency Response Transfer FunctionDiane GutierrezNo ratings yet
- Control Systems Week 1Document67 pagesControl Systems Week 1Mahmoud AliNo ratings yet
- NonlinearSyst Ch1Document35 pagesNonlinearSyst Ch1Komal AhmadNo ratings yet
- Non-Linear Control Systems: Recommended BooksDocument34 pagesNon-Linear Control Systems: Recommended BooksWaseem TariqNo ratings yet
- Sliding Mode Control: Asignatura: Electiva IV Prof. Christian Erazo Christian - Erazo@uan - Edu.coDocument27 pagesSliding Mode Control: Asignatura: Electiva IV Prof. Christian Erazo Christian - Erazo@uan - Edu.coDIEGONo ratings yet
- Lecture 1Document19 pagesLecture 1FarooqNo ratings yet
- E707 - Modern Control-2Document73 pagesE707 - Modern Control-2Raji Bello UmarNo ratings yet
- IntroSAL2Assignment2 Control of Thermal Power PlantDocument27 pagesIntroSAL2Assignment2 Control of Thermal Power PlantabdillahNo ratings yet
- Control Systems: Module: Modelling of SystemsDocument19 pagesControl Systems: Module: Modelling of Systemsee210002004No ratings yet
- Johnny Lam Report 238Document5 pagesJohnny Lam Report 238Lê Tuấn MinhNo ratings yet
- Modern Control Systems (MCS) : Lecture-30-31 Design of Control Systems in Sate SpaceDocument42 pagesModern Control Systems (MCS) : Lecture-30-31 Design of Control Systems in Sate SpaceBelayneh Tadesse100% (1)
- Week3 5Document22 pagesWeek3 5Abdullah MahsudNo ratings yet
- Lec - 1-2 Introduction To Control SystemsDocument25 pagesLec - 1-2 Introduction To Control SystemsMaryam BhattiNo ratings yet
- Basic Terminologies in Control System SystemDocument8 pagesBasic Terminologies in Control System SystemPandimadevi GanesanNo ratings yet
- Chapter 3 Design of Optimal ControllersDocument64 pagesChapter 3 Design of Optimal ControllersTsedenia TamiruNo ratings yet
- Linear Control SystemDocument865 pagesLinear Control SystemTAภaу ЎALLaмᎥlliNo ratings yet
- Chapter 2 Gain Scheduling Adaptive ControlDocument39 pagesChapter 2 Gain Scheduling Adaptive ControlTsion NigussieNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Auixiliary ViewsDocument13 pagesAuixiliary ViewsTsedenia TamiruNo ratings yet
- Multi-View DrawingDocument53 pagesMulti-View DrawingTsedenia TamiruNo ratings yet
- Optimal ControlDocument48 pagesOptimal ControlTsedenia TamiruNo ratings yet
- Sectional ViewsDocument46 pagesSectional ViewsTsedenia TamiruNo ratings yet
- Optimal Control and EstimationDocument211 pagesOptimal Control and EstimationTsedenia TamiruNo ratings yet
- Introduction To Optimal ControlDocument28 pagesIntroduction To Optimal ControlTsedenia TamiruNo ratings yet
- Chapter 3 Design of Optimal ControllersDocument64 pagesChapter 3 Design of Optimal ControllersTsedenia TamiruNo ratings yet
- Chapter 2 Solution TechniquesDocument44 pagesChapter 2 Solution TechniquesTsedenia TamiruNo ratings yet
- Chapter 1 Introduction To Optimal ControlDocument24 pagesChapter 1 Introduction To Optimal ControlTsedenia TamiruNo ratings yet
- Sensitivity and Specificity - Wikipedia 2Document1 pageSensitivity and Specificity - Wikipedia 2Victor VallejoNo ratings yet
- 5.3.1. Lesson#4 - Community Similarity - General Ecology Lecture BI 2-ADocument2 pages5.3.1. Lesson#4 - Community Similarity - General Ecology Lecture BI 2-AShareeze GomezNo ratings yet
- Data Structure Lab ManualDocument20 pagesData Structure Lab ManualISHITANo ratings yet
- Intrusion Detection in Software Defined Network Using Machine LearningDocument11 pagesIntrusion Detection in Software Defined Network Using Machine LearningdataprodcsNo ratings yet
- Final Summer Training ReportDocument24 pagesFinal Summer Training ReportHarish NaiduNo ratings yet
- Maths Roadmap For Machine LearningDocument16 pagesMaths Roadmap For Machine LearningamriteshworkNo ratings yet
- Chys 3P15 Exam ReviewDocument1 pageChys 3P15 Exam ReviewAmanda ScottNo ratings yet
- Ee315b Reader 2013 Stanford Dataconverters PDFDocument376 pagesEe315b Reader 2013 Stanford Dataconverters PDFAnass WanassNo ratings yet
- Data Mining Clustering PDFDocument15 pagesData Mining Clustering PDFSwing TradeNo ratings yet
- Algorithm & FlowchartDocument7 pagesAlgorithm & FlowchartAnas ShaikhNo ratings yet
- Module 4 - Decision TheoryDocument32 pagesModule 4 - Decision TheoryGhillian Mae GuiangNo ratings yet
- EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020Document12 pagesEN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020SAYED JAVED ALI SHAHNo ratings yet
- Problemas Semana 05-AnDocument2 pagesProblemas Semana 05-AnABEL ARNULFO BUEZO AJANo ratings yet
- An Introduction To The Split Step Fourier Method Using MATLABDocument15 pagesAn Introduction To The Split Step Fourier Method Using MATLABHafiz Faiz RasoolNo ratings yet
- Secure QR Code Scheme Based On Visual Cryptography: Xiaohe Cao, Liuping Feng, Peng Cao and Jianhua HuDocument4 pagesSecure QR Code Scheme Based On Visual Cryptography: Xiaohe Cao, Liuping Feng, Peng Cao and Jianhua HuBach DonNo ratings yet
- R09 ADVANCED CONTROL SYSTEMSfr 8736 PDFDocument2 pagesR09 ADVANCED CONTROL SYSTEMSfr 8736 PDFRiddhijit ChattopadhyayNo ratings yet
- Lect 12Document80 pagesLect 12Abdul HannanNo ratings yet
- Whitepaper QuopiDocument19 pagesWhitepaper Quopiliam veluNo ratings yet
- EBE Ch2Document10 pagesEBE Ch2Syed Muhammad Haris HayatNo ratings yet
- Introduction To CryptographyDocument69 pagesIntroduction To Cryptographyachuu1987No ratings yet
- The RSA AlgorithmDocument15 pagesThe RSA AlgorithmveenadivyakishNo ratings yet
- Proceedings of Fifth International ConfeDocument1,021 pagesProceedings of Fifth International ConfeOmprakash VermaNo ratings yet
- LPP Solution Using Simplex MethodDocument56 pagesLPP Solution Using Simplex Methodrohit4567867% (3)
- Problem 5.34: Plane X y 1Document2 pagesProblem 5.34: Plane X y 1amjones6610No ratings yet
- Application of Partition Function (B)Document2 pagesApplication of Partition Function (B)NITISH KUMARNo ratings yet
- A Multistage Stochastic Programming Model For The New Zealand Dairy IndustryDocument11 pagesA Multistage Stochastic Programming Model For The New Zealand Dairy IndustryotaviolmcNo ratings yet
- PSD Computation Using Modified Welch AlgorithmDocument4 pagesPSD Computation Using Modified Welch AlgorithmijsretNo ratings yet
- Amee Gtu Exam Preparation PDFDocument110 pagesAmee Gtu Exam Preparation PDFMohsin AnsariNo ratings yet
- RegressionDocument55 pagesRegressionthinnapat.siriNo ratings yet
- Review and Open Issues of Cryptographic Algorithms in Cyber SecurityDocument6 pagesReview and Open Issues of Cryptographic Algorithms in Cyber SecurityDuy HoangNo ratings yet