You might also like
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedNo ratings yet
- ACS Transfer Functions and StabilityDocument22 pagesACS Transfer Functions and StabilityFahmeed Ali MeoNo ratings yet
- Linear Control Systems (LCS) Transfer Function and StabilityDocument34 pagesLinear Control Systems (LCS) Transfer Function and StabilityRIMSHA KHURSHID100% (1)
- Feedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument29 pagesFeedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsRomadhonFitriyantoNo ratings yet
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument35 pagesControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanNo ratings yet
- Control Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI SystemsDocument41 pagesControl Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI Systemskamranzeb057No ratings yet
- Lecture-2 Transfer FunctionDocument32 pagesLecture-2 Transfer FunctionMuneeb JawaidNo ratings yet
- Control Chapter 1 - Lecture 1Document29 pagesControl Chapter 1 - Lecture 13re0oooNo ratings yet
- Transfer Function Basics & Transfer Function and StabilityDocument31 pagesTransfer Function Basics & Transfer Function and StabilityArvind kumar PrajapatiNo ratings yet
- Chapter - 2 - Mathematical Models of Systems - W2015Document75 pagesChapter - 2 - Mathematical Models of Systems - W2015120200421003nNo ratings yet
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Document91 pagesChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nNo ratings yet
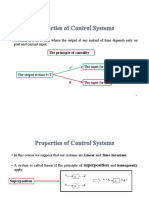
- A Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of CausalityDocument11 pagesA Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of Causalitygamer manNo ratings yet
- Introduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadDocument117 pagesIntroduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadEnGr Asad Hayat BanGashNo ratings yet
- Transfer Function and Stability AnalysisDocument29 pagesTransfer Function and Stability AnalysisJane Erestain BuenaobraNo ratings yet
- 4-Transfer Function and Modeling of Mechanical SystemDocument35 pages4-Transfer Function and Modeling of Mechanical SystemUsama KaleemNo ratings yet
- Feedback-Lesson-5Document2 pagesFeedback-Lesson-5Neo BataclanNo ratings yet
- FEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Document36 pagesFEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Junaid YNo ratings yet
- LEC1Document84 pagesLEC1RaihanNo ratings yet
- Lec#19-24 - Laplace DomainDocument42 pagesLec#19-24 - Laplace DomainDaniya AbbasiNo ratings yet
- Week 12Document15 pagesWeek 12onuraktas1923No ratings yet
- Advanced Optimal Control SystemsDocument49 pagesAdvanced Optimal Control SystemsTsedenia TamiruNo ratings yet
- Chapter 8 ControlDocument96 pagesChapter 8 ControlDESHMUKH ANKIT PRAKASHRAONo ratings yet
- Lecture 3 - 2Document42 pagesLecture 3 - 2faruktokuslu16No ratings yet
- LN2 (Electrical Systems)Document38 pagesLN2 (Electrical Systems)Deniz DemirNo ratings yet
- State Variable Analysis - DRAFTDocument34 pagesState Variable Analysis - DRAFTAl AidenNo ratings yet
- 15ECE302 Control Systems Engineering: Chapter 2: Modelling in Frequency DomainDocument41 pages15ECE302 Control Systems Engineering: Chapter 2: Modelling in Frequency DomainSandeepNo ratings yet
- Course 09 - Laplace 1Document39 pagesCourse 09 - Laplace 1ali fulanNo ratings yet
- Lecture 2Document52 pagesLecture 2faruktokuslu16No ratings yet
- Regulation & Control Ppt-1Document55 pagesRegulation & Control Ppt-1tadiwosNo ratings yet
- Transfer Function - Poles and Zeros - StabilityDocument9 pagesTransfer Function - Poles and Zeros - Stability666667No ratings yet
- CH 3Document91 pagesCH 3wehabekodaNo ratings yet
- Control Technology: Department of Engineering TechnologyDocument55 pagesControl Technology: Department of Engineering TechnologyTaha AmerNo ratings yet
- Stability R-H, Root Locus, Time Domain SpecsDocument81 pagesStability R-H, Root Locus, Time Domain SpecsTarek A-RNo ratings yet
- First Order SystemDocument41 pagesFirst Order SystemAbhilasha SaksenaNo ratings yet
- Chapter01b - Intro To Digital Logic DesignDocument47 pagesChapter01b - Intro To Digital Logic Designriel_ylayaNo ratings yet
- Modeling Dynamic SystemsDocument45 pagesModeling Dynamic Systemsyoussef hossamNo ratings yet
- Digital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341Document48 pagesDigital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341محمد القدوميNo ratings yet
- Advanced Control Theory: Dr. V. R. Jisha, Associate Professor, Dept. of Electrical Engg., CETDocument50 pagesAdvanced Control Theory: Dr. V. R. Jisha, Associate Professor, Dept. of Electrical Engg., CETarjungangadharNo ratings yet
- Control 05Document27 pagesControl 05أحمد تركي كحيوشNo ratings yet
- Principles of Measuring Instruments: Lecture TwoDocument91 pagesPrinciples of Measuring Instruments: Lecture TwoRenatus KatunduNo ratings yet
- Control Systems: Module: Modelling of SystemsDocument19 pagesControl Systems: Module: Modelling of Systemsee210002004No ratings yet
- Lecture 24 Oscillations, Energy Methods, Power System StabilizersDocument38 pagesLecture 24 Oscillations, Energy Methods, Power System StabilizersManuelNo ratings yet
- Ec Formula Notes 11Document369 pagesEc Formula Notes 11Tharun kondaNo ratings yet
- Lecture (2) : Mathematical Modeling of SystemsDocument52 pagesLecture (2) : Mathematical Modeling of SystemsHasan AljabaliNo ratings yet
- Lecture (2) : Mathematical Modeling of SystemsDocument52 pagesLecture (2) : Mathematical Modeling of SystemsSiraj MohammedNo ratings yet
- Week3 5Document22 pagesWeek3 5Abdullah MahsudNo ratings yet
- Lecture 3 (Mathematical Modeling of Mechanical Systems)Document62 pagesLecture 3 (Mathematical Modeling of Mechanical Systems)muhammad hamzaNo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Presentation On Laplace and Inverse Transform, TF and TD ModelingDocument20 pagesPresentation On Laplace and Inverse Transform, TF and TD ModelingHassan RazaNo ratings yet
- T3 - State Variable Models - 2021Document40 pagesT3 - State Variable Models - 2021James ChanNo ratings yet
- Lecture 14, 15 StabilityDocument45 pagesLecture 14, 15 StabilityHamza KhanNo ratings yet
- Control Systems (CS) : Lecture-3 Introduction Mathematical Modeling Mathematical Modeling of Mechanical SystemsDocument55 pagesControl Systems (CS) : Lecture-3 Introduction Mathematical Modeling Mathematical Modeling of Mechanical SystemsSuyash Dahake VlogsNo ratings yet
- Week 11Document16 pagesWeek 11onuraktas1923No ratings yet
- Module 2b - TF of Electrical and Mechanical SystemsDocument61 pagesModule 2b - TF of Electrical and Mechanical SystemsSyed Muhammad AliNo ratings yet
- EE5205 Control System DesignDocument44 pagesEE5205 Control System DesignntbandaraNo ratings yet
- 05 Time Response AnalysisDocument41 pages05 Time Response AnalysisFadly ShafiqNo ratings yet
- W EE 418 - Lecture 2 ModelingDocument20 pagesW EE 418 - Lecture 2 ModelingGGAP LASTNo ratings yet
- EMJ37103 EMJ37504 - Digital Control System Part IIDocument12 pagesEMJ37103 EMJ37504 - Digital Control System Part IInewtonmama00No ratings yet
- Time, Speed and Distance Assignment Questions: Topic/CourseDocument31 pagesTime, Speed and Distance Assignment Questions: Topic/CourseSuyash Dahake VlogsNo ratings yet
- Entrance Board2Document2 pagesEntrance Board2Suyash Dahake VlogsNo ratings yet
- Data Arrangements and Blood Relations AssisgnmentDocument35 pagesData Arrangements and Blood Relations AssisgnmentSuyash Dahake VlogsNo ratings yet
- Master SPDocument1 pageMaster SPSuyash Dahake VlogsNo ratings yet
- Unit 1 PEMDDocument16 pagesUnit 1 PEMDSuyash Dahake VlogsNo ratings yet
- Control Systems (CS) : Lecture-9 Time Domain Analysis of 2 Order SystemsDocument80 pagesControl Systems (CS) : Lecture-9 Time Domain Analysis of 2 Order SystemsSuyash Dahake VlogsNo ratings yet
- CS Lecture-7 Time Domain Analysis of Control SystemsDocument14 pagesCS Lecture-7 Time Domain Analysis of Control SystemsSuyash Dahake VlogsNo ratings yet
- Electrical Machine-1 Backlog Papper (BTEEC401)Document2 pagesElectrical Machine-1 Backlog Papper (BTEEC401)Suyash Dahake VlogsNo ratings yet
- 1 Lecture Block Diagram Representation of Control SystemsDocument65 pages1 Lecture Block Diagram Representation of Control SystemsSuyash Dahake VlogsNo ratings yet
- SwitchGear CA QuestionDocument3 pagesSwitchGear CA QuestionSuyash Dahake VlogsNo ratings yet
- Feedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsSuyash Dahake VlogsNo ratings yet
- Feedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsSuyash Dahake VlogsNo ratings yet
- Chaptr 2Document54 pagesChaptr 2Suyash Dahake VlogsNo ratings yet
- Control Systems (CS) : Lecture-3 Introduction Mathematical Modeling Mathematical Modeling of Mechanical SystemsDocument55 pagesControl Systems (CS) : Lecture-3 Introduction Mathematical Modeling Mathematical Modeling of Mechanical SystemsSuyash Dahake VlogsNo ratings yet
- 6 - Signal Flow GraphsDocument59 pages6 - Signal Flow GraphsSuyash Dahake VlogsNo ratings yet
- MGT162 Group AssignmentDocument16 pagesMGT162 Group Assignment2022457008No ratings yet
- LEARNERS BOOK 1 (2) ... ScienceDocument160 pagesLEARNERS BOOK 1 (2) ... SciencehussamNo ratings yet
- PDF Microsite Achieve Global AG Survey of Sales EffectivenessDocument44 pagesPDF Microsite Achieve Global AG Survey of Sales Effectivenessingrid_walrabensteinNo ratings yet
- FORMS Transaction DisputeDocument1 pageFORMS Transaction DisputeKristine Cruz-MaltoNo ratings yet
- Sample OMR Sheet Marking PDFDocument1 pageSample OMR Sheet Marking PDFMuraliNo ratings yet
- On Counterfactuality: A Multimodal Approach To (Apparent) Contradictions Between Positive Statements and Gestures of NegationDocument12 pagesOn Counterfactuality: A Multimodal Approach To (Apparent) Contradictions Between Positive Statements and Gestures of NegationYulia NikolaevaNo ratings yet
- Mutagenic Effects of Sodium Azide On The Quality of Maize SeedsDocument7 pagesMutagenic Effects of Sodium Azide On The Quality of Maize SeedsKanhiya MahourNo ratings yet
- 2006 Arawak Languages Encyclopedia of Language and LinguisticsDocument4 pages2006 Arawak Languages Encyclopedia of Language and LinguisticsSheldon JungleNo ratings yet
- Risk Management Framework and ProcessDocument16 pagesRisk Management Framework and ProcessIuliana T.No ratings yet
- ReportDocument3 pagesReportPrecious Anne MacalinoNo ratings yet
- Nicholas Kaldor On Adam Smith and Allyn Young: Review of Political EconomyDocument20 pagesNicholas Kaldor On Adam Smith and Allyn Young: Review of Political EconomyAdolfo MedranoNo ratings yet
- Response To 'Enforced Sunday Law Will Soon Become The Mark of The Beast'Document22 pagesResponse To 'Enforced Sunday Law Will Soon Become The Mark of The Beast'jennywren3177No ratings yet
- MA Urdu Revised Syllabus 2022-23Document35 pagesMA Urdu Revised Syllabus 2022-23Mazhar KhanNo ratings yet
- What Is A Modal Verb - List of Modal Verbs - GingerDocument9 pagesWhat Is A Modal Verb - List of Modal Verbs - GingerPatricia ShantiNo ratings yet
- The CatDocument2 pagesThe CatDodi SaputraNo ratings yet
- KTL - MocktestDocument3 pagesKTL - MocktestFTU.CS2 Bùi Võ Song ThươngNo ratings yet
- Etnoantropoloski Problemi 2023-02 11 BojicDocument24 pagesEtnoantropoloski Problemi 2023-02 11 BojicLazarovoNo ratings yet
- Pamela Presentation PDFDocument8 pagesPamela Presentation PDFawtshfhdNo ratings yet
- Test Tenses en AnswersDocument4 pagesTest Tenses en AnswersAmit Kumar LalNo ratings yet
- (2019) 7 CLJ 560 PDFDocument12 pages(2019) 7 CLJ 560 PDFhuntaNo ratings yet
- 11Document24 pages11anil.gelra5140100% (1)
- Assignment 1 - CIEDocument28 pagesAssignment 1 - CIEmarshall mingguNo ratings yet
- The Snouters - Form and Life of - Harald StumpkeDocument126 pagesThe Snouters - Form and Life of - Harald StumpkeAlberto Humanes MuñozNo ratings yet
- List of US 501 (C) (3) Charities Located in CanadaDocument5 pagesList of US 501 (C) (3) Charities Located in CanadaART'S PLACENo ratings yet
- FSLDMDocument5 pagesFSLDMaiabbasi9615No ratings yet
- Sacha Doucet-Kim Cancer AssignmentDocument3 pagesSacha Doucet-Kim Cancer AssignmentSacha Doucet-KimNo ratings yet
- Strict Liability Offences ExplainedDocument7 pagesStrict Liability Offences ExplainedJoseph ClarkNo ratings yet
- APES Tragedy of The Commons Lab Activity: Purpose: ObjectiveDocument4 pagesAPES Tragedy of The Commons Lab Activity: Purpose: ObjectivejakeingerNo ratings yet
- Cover Letter and Thank You Letter ExamplesDocument7 pagesCover Letter and Thank You Letter Examplesf675ztsf100% (2)
- Minutes of Meeting 12-09-17Document3 pagesMinutes of Meeting 12-09-17MykaNo ratings yet