You might also like
- Pilot's guide to Avanti II navigation equipmentDocument6 pagesPilot's guide to Avanti II navigation equipmentHimanshu HaldarNo ratings yet
- Oxford Atpl 4th Ed Book 11 Radio Navigation PDFDocument444 pagesOxford Atpl 4th Ed Book 11 Radio Navigation PDFAditya Mehta100% (1)
- Introduction To Directional DrillingDocument63 pagesIntroduction To Directional DrillingTural İsgenderovNo ratings yet
- GPS (Global Positioning System) & DGPS (Differential Global Positioning System)Document103 pagesGPS (Global Positioning System) & DGPS (Differential Global Positioning System)NoCopyrightTunesNo ratings yet
- Pengantar GPSDocument66 pagesPengantar GPSILEVNo ratings yet
- Vdocuments - MX TdefnodeDocument67 pagesVdocuments - MX TdefnodeamarNo ratings yet
- 2011 S 02 FinklemanDocument22 pages2011 S 02 Finklemantest testNo ratings yet
- Vs 828Document19 pagesVs 828mitranodavideNo ratings yet
- 37464393ruyhgfnchf PDFDocument30 pages37464393ruyhgfnchf PDFKashif NazirNo ratings yet
- 3.3. Special OrbitsDocument18 pages3.3. Special OrbitsVirginiaNo ratings yet
- D06-04 KnippersPPTeachingDocument45 pagesD06-04 KnippersPPTeachingUNNATI AGRAWALNo ratings yet
- MODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSDocument64 pagesMODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSgavin.vedder1980No ratings yet
- Elevation Corrections (Part III)Document23 pagesElevation Corrections (Part III)Ali MouradNo ratings yet
- MODULE 5 - PRS Handling - UTMDocument32 pagesMODULE 5 - PRS Handling - UTMgavin.vedder1980No ratings yet
- Dynamic Positioning c12Document28 pagesDynamic Positioning c12S D100% (1)
- Geodesy FundamentalsDocument61 pagesGeodesy FundamentalsPrasanna NaikNo ratings yet
- Intro To GPSDocument62 pagesIntro To GPSlimpkid666No ratings yet
- Geometric Geodesy A (2013) PDFDocument151 pagesGeometric Geodesy A (2013) PDFCrystelGraceAntonioWall0% (1)
- A Surface Constraint Approach For Solar Sail OrbitsDocument16 pagesA Surface Constraint Approach For Solar Sail OrbitsAbhayOberoiNo ratings yet
- Global Positioning System (GPS) - 1Document13 pagesGlobal Positioning System (GPS) - 1TechZenNo ratings yet
- Latitude and Longitude Treasure HuntDocument17 pagesLatitude and Longitude Treasure HuntSaanvi NairNo ratings yet
- There's No Difference There's No Difference Between Grid and Ground Between Grid and GroundDocument43 pagesThere's No Difference There's No Difference Between Grid and Ground Between Grid and GroundAndenet AshagrieNo ratings yet
- Transit Method Detects Exoplanet AtmospheresDocument16 pagesTransit Method Detects Exoplanet AtmospheresRandheer GautamNo ratings yet
- 10_STPP_3D_Coordinate_TransformationDocument72 pages10_STPP_3D_Coordinate_TransformationNaufalNo ratings yet
- Global Positioning System (GPS)Document41 pagesGlobal Positioning System (GPS)Isabella LagboNo ratings yet
- GPS 2003Document182 pagesGPS 2003أحمد العبودNo ratings yet
- Citsit Padl 1Document3 pagesCitsit Padl 1Rizky Agung NNo ratings yet
- Basic Satellite Telecom Theory and Concepts: Arabsat, EscDocument74 pagesBasic Satellite Telecom Theory and Concepts: Arabsat, EscElfatih HashimNo ratings yet
- Improving Convergence Monitoring at Rio Tinto Argyle Diamond MineDocument12 pagesImproving Convergence Monitoring at Rio Tinto Argyle Diamond MineRuth rivero huanay0% (1)
- Precision Ag lecture on coordinate systemsDocument6 pagesPrecision Ag lecture on coordinate systemsDinesh GoyalNo ratings yet
- Concept of Coordinate Systems and Map ProjectionsDocument65 pagesConcept of Coordinate Systems and Map ProjectionshabteNo ratings yet
- Introduction To Computational Fluid Dynamics (CFD) : Tao Xing and Fred SternDocument47 pagesIntroduction To Computational Fluid Dynamics (CFD) : Tao Xing and Fred SternBalaji MohanNo ratings yet
- Lecture 3 - Geodesy ProjectionsDocument84 pagesLecture 3 - Geodesy ProjectionsZemede Mulushewa NigatuNo ratings yet
- Introduction To Computational Fluid Dynamics (CFD) : Tao Xing, Shanti Bhushan and Fred SternDocument53 pagesIntroduction To Computational Fluid Dynamics (CFD) : Tao Xing, Shanti Bhushan and Fred Sternशून्य पूर्णNo ratings yet
- Physical Geodesy - Petr VanicekDocument187 pagesPhysical Geodesy - Petr VanicekPepe FC100% (2)
- 7 8 (GPS)Document6 pages7 8 (GPS)Nabeel AhmedNo ratings yet
- Mapping With GISDocument24 pagesMapping With GISAlfred TaylorNo ratings yet
- GPS (Sep 22)Document32 pagesGPS (Sep 22)VinothNo ratings yet
- Surveying 1Document2 pagesSurveying 1haes.sisonNo ratings yet
- SurveyingDocument44 pagesSurveyingRebels BoxNo ratings yet
- 1grindley Lance Introduction To Basic NavigationDocument231 pages1grindley Lance Introduction To Basic NavigationKel RamosNo ratings yet
- 2013 GLGMC ISGS Stohr PhotogrammetryDocument35 pages2013 GLGMC ISGS Stohr PhotogrammetryDavid Fernando CalozumaNo ratings yet
- A Derivation of Three-Dimensional Ray Equations in Ellipsoidal CoordinatesDocument7 pagesA Derivation of Three-Dimensional Ray Equations in Ellipsoidal CoordinatesJ. E. Gómez-CorreaNo ratings yet
- Hyperspectral Mission FinalDocument20 pagesHyperspectral Mission FinalwubegzierNo ratings yet
- 05 Satellites N Orbits ColorDocument5 pages05 Satellites N Orbits ColorsomeNo ratings yet
- Phy423 Tutorial KitDocument8 pagesPhy423 Tutorial KitMelisa BaşakNo ratings yet
- Satellite Communications FundamentalsDocument26 pagesSatellite Communications FundamentalsLissy AranaNo ratings yet
- Navigation Systems and Their ImplementationDocument29 pagesNavigation Systems and Their ImplementationJustin RajaNo ratings yet
- 480 PresentationDocument29 pages480 PresentationMariamNo ratings yet
- GPS by Akash AdwaniDocument40 pagesGPS by Akash Adwanisolalasolala7No ratings yet
- GNSS/GPS BasicsDocument25 pagesGNSS/GPS BasicsSharfari MatNo ratings yet
- Geospatial Reference SystemsDocument3 pagesGeospatial Reference SystemsClintone OmondiNo ratings yet
- Lecture 9 2006Document22 pagesLecture 9 2006api-3717234No ratings yet
- Image Correction: Geometric Correction Sut 4 13 April 2021Document42 pagesImage Correction: Geometric Correction Sut 4 13 April 2021Fanelo FelicityNo ratings yet
- 20010038142Document37 pages20010038142Chaitanya GoruputiNo ratings yet
- Schnabel Lysmer Seed 1972Document114 pagesSchnabel Lysmer Seed 1972Paloma CortizoNo ratings yet
- An Introduction To The Global PositioninDocument28 pagesAn Introduction To The Global PositioninhenrytulyamulebaNo ratings yet
- Unit - I: GPS FundamentalsDocument125 pagesUnit - I: GPS Fundamentalsapi-3828816No ratings yet
- Basic Techniques in Structural Geology and Seismic ImagingDocument27 pagesBasic Techniques in Structural Geology and Seismic ImagingAlionk GaaraNo ratings yet
- ELEC4600 Navigation Engineering NotesDocument130 pagesELEC4600 Navigation Engineering NoteshazeypotterNo ratings yet
- RNV 10Document33 pagesRNV 10Valerian SanduNo ratings yet
- Computational Modelling and Simulation of Aircraft and the Environment, Volume 1: Platform Kinematics and Synthetic EnvironmentFrom EverandComputational Modelling and Simulation of Aircraft and the Environment, Volume 1: Platform Kinematics and Synthetic EnvironmentNo ratings yet
- BNDG HyDocument3 pagesBNDG HyAzeem RajaNo ratings yet
- Ghe BHFDocument3 pagesGhe BHFAzeem RajaNo ratings yet
- Lohg GFDocument2 pagesLohg GFAzeem RajaNo ratings yet
- FDFDSFDocument2 pagesFDFDSFAzeem RajaNo ratings yet
- Equatorial FieldDocument2 pagesEquatorial FieldAzeem RajaNo ratings yet
- ScintillationDocument8 pagesScintillationAzeem RajaNo ratings yet
- GPS Unit ConverstionDocument3 pagesGPS Unit ConverstionAzeem RajaNo ratings yet
- CIGALA ProjectDocument20 pagesCIGALA ProjectAzeem RajaNo ratings yet
- Airport Design 150 - 5300 - 13ADocument296 pagesAirport Design 150 - 5300 - 13AAbdulmajeed KandakjiNo ratings yet
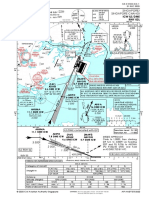
- Instrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDDocument1 pageInstrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDabang fayyadNo ratings yet
- Dependent Navigation Systems (DNS) Standard AET - EndorsementDocument14 pagesDependent Navigation Systems (DNS) Standard AET - EndorsementMarcos GomezNo ratings yet
- The VOR: Understanding VHF Omni-Directional Radio Range NavigationDocument32 pagesThe VOR: Understanding VHF Omni-Directional Radio Range NavigationMooeshooeNo ratings yet
- VOR To VOR Navigation PDFDocument6 pagesVOR To VOR Navigation PDFFabian LudeNo ratings yet
- 571118a 0001CDocument244 pages571118a 0001Cmuhammad arif sulaimanNo ratings yet
- National Spectrum Allocations and Assignment PlanDocument240 pagesNational Spectrum Allocations and Assignment PlanSatheeskumarNo ratings yet
- Final Internship Report and Project HHFMDocument74 pagesFinal Internship Report and Project HHFMFatima JibrilNo ratings yet
- ANS 1.7.025 - ILS Approval Rev 1 PDFDocument64 pagesANS 1.7.025 - ILS Approval Rev 1 PDFAnonymous QJCUBkXNZNo ratings yet
- D M E DME: Istance Easuring QuipmentDocument17 pagesD M E DME: Istance Easuring QuipmentIan Edianel MagdaugNo ratings yet
- IFR Enroute Chart SymbolsDocument10 pagesIFR Enroute Chart SymbolsTim Morgan100% (16)
- Kmiaklax PDF 1706289148Document81 pagesKmiaklax PDF 1706289148pela182003No ratings yet
- Distance Measuring Equipment (DME) : Chapter - 3Document20 pagesDistance Measuring Equipment (DME) : Chapter - 3Chiranjivi KuthumiNo ratings yet
- MARU 310 - 320 OJT - enDocument137 pagesMARU 310 - 320 OJT - enYo PieNo ratings yet
- Supplement To Annex 10, Vol. 1, 5th EditionDocument23 pagesSupplement To Annex 10, Vol. 1, 5th EditionJune SendaydiegoNo ratings yet
- Fs Flying School ManualDocument78 pagesFs Flying School ManualJonathan TooleNo ratings yet
- Rnav AtplgsDocument5 pagesRnav AtplgsHelmut91No ratings yet
- Aviation Frequency Spectrum Uses and WRC-15 OutcomesDocument2 pagesAviation Frequency Spectrum Uses and WRC-15 OutcomesViorel AdetuNo ratings yet
- ZSQZDocument21 pagesZSQZjoker hotNo ratings yet
- Microwave Landing SystemDocument31 pagesMicrowave Landing SystemKaung MyatToeNo ratings yet
- Physical Inspection Check List - Wja Sample Format-1Document18 pagesPhysical Inspection Check List - Wja Sample Format-1Arvind . NaiduNo ratings yet
- Cap 670Document470 pagesCap 670kwokhy100% (2)
- VORDME Approach B737Document6 pagesVORDME Approach B737haythemNo ratings yet
- Ata 23 1 03 01Document702 pagesAta 23 1 03 01Wilson BenincoreNo ratings yet
- Instrument Landing Automation System. AutolandDocument28 pagesInstrument Landing Automation System. AutolandprasobhNo ratings yet
- Avionics - Antennas Pgs 150-154Document5 pagesAvionics - Antennas Pgs 150-154Dawit GidayNo ratings yet
- Radio Navigation SummaryDocument4 pagesRadio Navigation SummaryStefano Capovilla100% (1)
- Easy Access Rules For Continuing Airworthiness (Jun 2017)Document86 pagesEasy Access Rules For Continuing Airworthiness (Jun 2017)rmnluciNo ratings yet