You might also like
- Activity 1.2.5 Aerodynamic Forces Answer KeyDocument6 pagesActivity 1.2.5 Aerodynamic Forces Answer KeyJose CharlesNo ratings yet
- cl605 QRHDocument136 pagescl605 QRHFidel Arellano100% (1)
- Air AccidentsDocument13 pagesAir AccidentsMadhavilatha0% (3)
- List of Top French Companies in IndiaDocument17 pagesList of Top French Companies in Indiakalika311100% (1)
- Doc.10086-EN Manual On Information and Instructions For Passenger SafetyDocument68 pagesDoc.10086-EN Manual On Information and Instructions For Passenger SafetyAnna IvanovaNo ratings yet
- Lecture GPSDocument42 pagesLecture GPSLena100% (2)
- SOPs All E190Document19 pagesSOPs All E190Carlos Perez FerrerNo ratings yet
- MODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSDocument64 pagesMODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSgavin.vedder1980No ratings yet
- Electronic Navigation: Lesson-6a: Satellite NavigationDocument159 pagesElectronic Navigation: Lesson-6a: Satellite NavigationErcan Yüksekyıldız0% (1)
- Global Positioning System (GPS)Document37 pagesGlobal Positioning System (GPS)Er Amit AryaNo ratings yet
- Unit - I: GPS FundamentalsDocument125 pagesUnit - I: GPS Fundamentalsapi-3828816No ratings yet
- M-C. Angoninand Ph. Tourrenc - Cold Atom Interferometer in A Satellite: Orders of Magnitude of The Tidal EffectsDocument19 pagesM-C. Angoninand Ph. Tourrenc - Cold Atom Interferometer in A Satellite: Orders of Magnitude of The Tidal EffectsPortsnuyhNo ratings yet
- Communications Equipment II (CM 417) - 4Document14 pagesCommunications Equipment II (CM 417) - 4Sara ElsilinyNo ratings yet
- Gps (Global Positioning System) : Prof. A. JabeenaDocument40 pagesGps (Global Positioning System) : Prof. A. JabeenaAryan VermaNo ratings yet
- 37464393ruyhgfnchf PDFDocument30 pages37464393ruyhgfnchf PDFKashif NazirNo ratings yet
- Anik GPSDocument27 pagesAnik GPSAniket NagpalNo ratings yet
- GPS 2003Document182 pagesGPS 2003أحمد العبودNo ratings yet
- The Global Positioning SystemDocument27 pagesThe Global Positioning SystemVishu VaidyaNo ratings yet
- Sur-Ii U4l1Document3 pagesSur-Ii U4l1Senthamizh SelvanNo ratings yet
- Enge-Aviation Benefits From GNSSDocument17 pagesEnge-Aviation Benefits From GNSSGabriel Rojas L.No ratings yet
- Global Positioning System Space SegmentDocument3 pagesGlobal Positioning System Space SegmentPravin HandeNo ratings yet
- GNSS Surveying,: GPS Error-2Document50 pagesGNSS Surveying,: GPS Error-2ciprian preda100% (1)
- Satellite & Radar PresentationDocument25 pagesSatellite & Radar PresentationIbrahim BodonNo ratings yet
- Elec - Nav - L11 - Satellite Nav-GPSDocument152 pagesElec - Nav - L11 - Satellite Nav-GPSEmir BilmezNo ratings yet
- Nav Aids NoteDocument80 pagesNav Aids NoteZobaer Ahmed100% (1)
- Platforms For Remote SensingDocument38 pagesPlatforms For Remote SensingMahfuzur RahmanNo ratings yet
- Solutions For Homework #2: Tive Swath Width. The Effective Swath Width Is The Length Along TheDocument7 pagesSolutions For Homework #2: Tive Swath Width. The Effective Swath Width Is The Length Along The吴文权No ratings yet
- Elec - Nav L11 Satellite Nav-GPSDocument144 pagesElec - Nav L11 Satellite Nav-GPSEreN100% (1)
- Satellite Motion 5 Gps SolnDocument3 pagesSatellite Motion 5 Gps SolnJoey BryanNo ratings yet
- Sat NavDocument10 pagesSat NavfcoespinosaNo ratings yet
- Global Positioning SysstemDocument40 pagesGlobal Positioning SysstemAnup MishraNo ratings yet
- Radio Aids Viva-1Document93 pagesRadio Aids Viva-1s malikNo ratings yet
- Chapter 5 - Introduction To GPS, GIS and Remote SensingDocument88 pagesChapter 5 - Introduction To GPS, GIS and Remote SensingABAMELANo ratings yet
- Introduction To The GPSDocument31 pagesIntroduction To The GPSarjunr1991100% (3)
- GPS PDFDocument34 pagesGPS PDFDheeraj RanganathNo ratings yet
- 1.1 What Is GPS?: A. Space SegmentDocument11 pages1.1 What Is GPS?: A. Space SegmentReiger RoyalNo ratings yet
- NAVSTAR Global Positioning System (GPS)Document13 pagesNAVSTAR Global Positioning System (GPS)Aboody AL-ghamdyNo ratings yet
- Subject: Original GPS TechnologiesDocument51 pagesSubject: Original GPS TechnologiesMalik ZainNo ratings yet
- GPS Basics v.1.6Document81 pagesGPS Basics v.1.6sorbisorbi100% (1)
- Positioning and Navigation in Seismic SurveyDocument9 pagesPositioning and Navigation in Seismic Surveyalvin f k champion leagueNo ratings yet
- Het316 - L019 GPSDocument9 pagesHet316 - L019 GPSanthony greavesNo ratings yet
- Introduction Gps Presentation 1Document57 pagesIntroduction Gps Presentation 1ganeshNo ratings yet
- GPSDocument149 pagesGPSVivek Gill100% (2)
- Nav 1 Week 2Document31 pagesNav 1 Week 2Roger TerminatorNo ratings yet
- Global Positioning System (GPS) - 1Document13 pagesGlobal Positioning System (GPS) - 1TechZenNo ratings yet
- Lecture 7 - GNSS Positioning MethodsDocument46 pagesLecture 7 - GNSS Positioning MethodsVlaire Janrex LondoñoNo ratings yet
- Gpsro Lecture KL 2022Document54 pagesGpsro Lecture KL 2022yjkbixqqygcoadnobqNo ratings yet
- GPS MaterialDocument17 pagesGPS Materialభార్గవ్ కుమార్No ratings yet
- Lecture 1Document54 pagesLecture 1Muhammad FahimNo ratings yet
- Sensor CharacteristicsDocument35 pagesSensor CharacteristicsmadhuspatitripathyNo ratings yet
- Error Budget For SPSDocument15 pagesError Budget For SPSJohn Egyir Aggrey100% (1)
- Microwave Communications LectureDocument73 pagesMicrowave Communications LectureKen100% (1)
- 2 - Sensors, Platforms & Earth Resources SatellitesDocument54 pages2 - Sensors, Platforms & Earth Resources Satellitespanasheal matanhireNo ratings yet
- Fundamentals of GPS: P.L.N. RajuDocument30 pagesFundamentals of GPS: P.L.N. RajuPranab PrajapatiNo ratings yet
- Global Positioning System (GPS) : Block II/IIA/IIR/IIR-M SatellitesDocument49 pagesGlobal Positioning System (GPS) : Block II/IIA/IIR/IIR-M SatellitesKriti ChhabraNo ratings yet
- Notes On Observational and Radar Coordinates For Localized ObserversDocument17 pagesNotes On Observational and Radar Coordinates For Localized ObserversHammoudeh Yani Marmar ShantiNo ratings yet
- Seminar On GPS: Submitted By: Manish Kumar 108163 ECE-2Document20 pagesSeminar On GPS: Submitted By: Manish Kumar 108163 ECE-2mkumar5106No ratings yet
- Introduction To Geospatial Technologies: Chpt. 4. Global Positioning SystemDocument51 pagesIntroduction To Geospatial Technologies: Chpt. 4. Global Positioning SystemRajendra prasad G.CNo ratings yet
- Relativity and The Global Positioning SystemDocument7 pagesRelativity and The Global Positioning Systemmohammad909No ratings yet
- GPS Global Positioning System: Dr.G.Bhaskaran Senior Lecturer Department of Geography University of Madras, Chennai-5Document73 pagesGPS Global Positioning System: Dr.G.Bhaskaran Senior Lecturer Department of Geography University of Madras, Chennai-5kalichittillaNo ratings yet
- An Introduction To The Global PositioninDocument28 pagesAn Introduction To The Global PositioninhenrytulyamulebaNo ratings yet
- Satellite Communication: Dr. Pritam Keshari Sahoo Ecec, AujDocument110 pagesSatellite Communication: Dr. Pritam Keshari Sahoo Ecec, AujPritam Keshari SahooNo ratings yet
- Beyond the Edge: Historic Stories of Polar Navigation: Beyond the Edge, #3From EverandBeyond the Edge: Historic Stories of Polar Navigation: Beyond the Edge, #3No ratings yet
- Capture Dynamics and Chaotic Motions in Celestial Mechanics: With Applications to the Construction of Low Energy TransfersFrom EverandCapture Dynamics and Chaotic Motions in Celestial Mechanics: With Applications to the Construction of Low Energy TransfersNo ratings yet
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersFrom EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersRating: 5 out of 5 stars5/5 (1)
- RNV 04Document26 pagesRNV 04Valerian SanduNo ratings yet
- SuccessiveLoopclosurebasedQuadraturecontrol PDFDocument8 pagesSuccessiveLoopclosurebasedQuadraturecontrol PDFValerian SanduNo ratings yet
- Mobarez - 2019 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 610 - 012016 PDFDocument20 pagesMobarez - 2019 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 610 - 012016 PDFValerian SanduNo ratings yet
- Optirob 2016-2 PDFDocument7 pagesOptirob 2016-2 PDFValerian SanduNo ratings yet
- MECH6091 - Poject8.LATERAL FLIGHT CONTROL PRESENTATION PDFDocument23 pagesMECH6091 - Poject8.LATERAL FLIGHT CONTROL PRESENTATION PDFValerian SanduNo ratings yet
- BAllc01-Bell 407 Introduction 21JAN15Document16 pagesBAllc01-Bell 407 Introduction 21JAN15pilot digitalNo ratings yet
- Wind Tunnels of Nasa HistoyDocument209 pagesWind Tunnels of Nasa HistoyChiorean StefanNo ratings yet
- Sydney (YSSY)Document68 pagesSydney (YSSY)NeethNo ratings yet
- CAP1535 Skyway Code V2 PRINTDocument164 pagesCAP1535 Skyway Code V2 PRINTpoppy reversNo ratings yet
- Atlas Centaur AC-9 Press KitDocument14 pagesAtlas Centaur AC-9 Press KitBob Andrepont100% (1)
- DGCA Form 65-01 Application For Written Test - Oct 2017Document2 pagesDGCA Form 65-01 Application For Written Test - Oct 2017M Husnan AndriyanaNo ratings yet
- UNOOSA - Study GuideDocument28 pagesUNOOSA - Study GuideAbdul AhadNo ratings yet
- Russia Announces To Take First Tourist On Spacewalk in 2023Document8 pagesRussia Announces To Take First Tourist On Spacewalk in 2023Kumar GauravNo ratings yet
- Aircraft Forms ManualDocument156 pagesAircraft Forms Manualapi-286454652100% (2)
- Air Regulations 03 Session.Document7 pagesAir Regulations 03 Session.bk songsNo ratings yet
- SKBODocument69 pagesSKBOWalterNo ratings yet
- EITK Case StudyDocument35 pagesEITK Case StudyMadhuNo ratings yet
- Investigation Into Rotor Blade AerodynamicsDocument114 pagesInvestigation Into Rotor Blade AerodynamicsneofakNo ratings yet
- Hypersonics Before The ShuttleDocument132 pagesHypersonics Before The ShuttleFrogfootNo ratings yet
- Rocket Stages: InputDocument2 pagesRocket Stages: InputNiloy DasNo ratings yet
- 05.0 User Guide - Grammar Starter PhrasesDocument5 pages05.0 User Guide - Grammar Starter PhrasesSaadia AnjumNo ratings yet
- CR Ipc 1 0 00 - R8Document490 pagesCR Ipc 1 0 00 - R8FelipeNo ratings yet
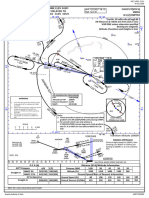
- Vocl-Ils (Z) - Rwy-10Document1 pageVocl-Ils (Z) - Rwy-10tanyaqthomasNo ratings yet
- CallsDocument104 pagesCallsSaurabh MeenaNo ratings yet
- S76C+ G81 Avionics v2.1Document43 pagesS76C+ G81 Avionics v2.1carppano100% (3)
- Design of Bomber Aircraft: Department of Aeronautical Engineering Gojan School of Business and TechnologyDocument51 pagesDesign of Bomber Aircraft: Department of Aeronautical Engineering Gojan School of Business and TechnologyThilak KumarNo ratings yet
- What Is Dissymmetry of LiftDocument4 pagesWhat Is Dissymmetry of LiftRon McIntyreNo ratings yet
- Casiño Aaron Activity 2Document7 pagesCasiño Aaron Activity 2Aaron CasinoNo ratings yet
- From Spaceships To Orbiting StationsDocument136 pagesFrom Spaceships To Orbiting StationsBob Andrepont100% (1)