You might also like
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Facts 3Document14 pagesFacts 3gjk1236596100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- HVDC and FACTS for Reactive Power ControlDocument15 pagesHVDC and FACTS for Reactive Power ControlSunitha MaryNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Lecture 9-Power - System - Control - and - StabilityDocument8 pagesLecture 9-Power - System - Control - and - Stabilityibrahim muhammad yusufNo ratings yet
- Slup 075Document12 pagesSlup 075Gowtham SanampalliNo ratings yet
- SVC Applications: Increase in Steady-State Power-Transfer CapacityDocument21 pagesSVC Applications: Increase in Steady-State Power-Transfer CapacityChetan KotwalNo ratings yet
- Digital Current Limiting Techniques For Switching Power Supplies PDFDocument9 pagesDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraNo ratings yet
- Static Shunt Compensation: Presented by T.S.L.V.AyyaraoDocument13 pagesStatic Shunt Compensation: Presented by T.S.L.V.AyyaraoGreenhearthazel Varma PdgNo ratings yet
- Understanding Power Factor Correction in Switched Mode Power SuppliesDocument12 pagesUnderstanding Power Factor Correction in Switched Mode Power SuppliesBalan PalaniappanNo ratings yet
- Facts and PQ Unit-IIIDocument9 pagesFacts and PQ Unit-IIIAniket ANo ratings yet
- Synchronous Condenser: Synchronous Compensator) Is A Device Identical To ADocument8 pagesSynchronous Condenser: Synchronous Compensator) Is A Device Identical To AAdeniji Olusegun100% (1)
- Labmanualpsdvsemexperimentno5 140126061652 Phpapp02Document5 pagesLabmanualpsdvsemexperimentno5 140126061652 Phpapp02amerkhan1983No ratings yet
- Untitled DocumentDocument14 pagesUntitled DocumentOMKAR PATILNo ratings yet
- Ferroresonant Transformers White PaperDocument10 pagesFerroresonant Transformers White PaperMilannet MilannetNo ratings yet
- 2019 Grid of The Future Symposium Mitigation of Inrush Current and Voltage Drop at Solar Farm Interconnections Due To Transformer Energization Using Closing ResistorsDocument10 pages2019 Grid of The Future Symposium Mitigation of Inrush Current and Voltage Drop at Solar Farm Interconnections Due To Transformer Energization Using Closing ResistorsfbaldnerNo ratings yet
- Voltage and Current TransformersDocument27 pagesVoltage and Current TransformersRebekah Powell100% (1)
- Reactive PowerDocument17 pagesReactive PowerPrateek David0% (1)
- A Presentation On Reactive Power Compensation: BY K.S.S Venkata Satya Naveen S.Manoj KumarDocument26 pagesA Presentation On Reactive Power Compensation: BY K.S.S Venkata Satya Naveen S.Manoj KumarFuh ValleryNo ratings yet
- Methods For Power Factor ImprovementDocument7 pagesMethods For Power Factor ImprovementClint PaulNo ratings yet
- Harmonicguard™: Harmonic CurrentsDocument5 pagesHarmonicguard™: Harmonic CurrentsJunior enriquez cabezudoNo ratings yet
- Exp2 Magnetic AmplifierDocument20 pagesExp2 Magnetic AmplifierNikhil Aggarwal50% (2)
- Relay Setting (Directional) : Leakage FluxDocument8 pagesRelay Setting (Directional) : Leakage Fluxjyoti kachareNo ratings yet
- Static Shunt Compensation for Voltage RegulationDocument16 pagesStatic Shunt Compensation for Voltage RegulationAlisha AnjumNo ratings yet
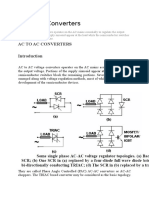
- AC To AC Converters Unit 5Document37 pagesAC To AC Converters Unit 5manoj kumar0% (1)
- Applications of Power Electronics To Power SystemsDocument11 pagesApplications of Power Electronics To Power SystemsManish meenaNo ratings yet
- FACTS Study Notes by AaruDocument71 pagesFACTS Study Notes by Aarusujithadharani9813No ratings yet
- Pro Power FactorDocument45 pagesPro Power Factorsewagegnehu belachewuNo ratings yet
- PRINCIPLES OF VOLTAGE REGULATIONDocument11 pagesPRINCIPLES OF VOLTAGE REGULATIONsalekojic5332No ratings yet
- Control Loops in power systemsDocument22 pagesControl Loops in power systemsMuntadher AbbasNo ratings yet
- Reactive Power Compensation SeminarDocument19 pagesReactive Power Compensation SeminarShivam TayadeNo ratings yet
- Improve Power Quality and Reactive Power Compensation Using D-STATCOMDocument12 pagesImprove Power Quality and Reactive Power Compensation Using D-STATCOMRamu LalamNo ratings yet
- EEE4005 Automatic Voltage ControlDocument41 pagesEEE4005 Automatic Voltage ControlAyush AgarwalNo ratings yet
- Transmission Line LoadabilityDocument9 pagesTransmission Line LoadabilitygaganNo ratings yet
- Power Quality ImprovementDocument5 pagesPower Quality ImprovementPaula SmithNo ratings yet
- FACTS Controller IntroductionDocument17 pagesFACTS Controller IntroductionrajashekarmandiNo ratings yet
- V.I.P. Dasanayake CapacitanceDocument5 pagesV.I.P. Dasanayake CapacitanceIsuru Pasan Dasanayake100% (1)
- Electric DrivesDocument16 pagesElectric DrivesElie KabangaNo ratings yet
- Voltage Control and Power Factor Improvement TechniquesDocument24 pagesVoltage Control and Power Factor Improvement Techniquesrv_andeNo ratings yet
- Voltage Control:: Fig 1. Load Connected To The Source Through A LineDocument8 pagesVoltage Control:: Fig 1. Load Connected To The Source Through A LineMohd Afzal BiyabaniNo ratings yet
- Reactive Power Compensation: BY M.Sethu Madhavan EPE 15011D4914Document25 pagesReactive Power Compensation: BY M.Sethu Madhavan EPE 15011D4914chandra 798No ratings yet
- Directional Over CurrentDocument14 pagesDirectional Over CurrentAisah El ArinalNo ratings yet
- Control Loops 2Document22 pagesControl Loops 2Muntadher AbbasNo ratings yet
- Power System Instability-What Relay Engineers Need To KnowDocument8 pagesPower System Instability-What Relay Engineers Need To KnowFlo MircaNo ratings yet
- Electrodynamometer Type WattmeterDocument16 pagesElectrodynamometer Type Wattmeteranon_463330020No ratings yet
- DC motor starter explainedDocument5 pagesDC motor starter explainedTynoh MusukuNo ratings yet
- Single Phase Power SourceDocument1 pageSingle Phase Power Sourceippon_osotoNo ratings yet
- VidyadhariDocument5 pagesVidyadharividyadhari12No ratings yet
- DocuDocument49 pagesDocutechmindzNo ratings yet
- EMTP, Transient Stability and Power Flow Models and Controls of VSC Based FACTS Controllers - E. Uzunovic - 2001Document231 pagesEMTP, Transient Stability and Power Flow Models and Controls of VSC Based FACTS Controllers - E. Uzunovic - 2001M8ow6f100% (1)
- Zero-Voltage Switching For Three-Level Capacitor Clamping InverterDocument11 pagesZero-Voltage Switching For Three-Level Capacitor Clamping InverterTiền Hoàng VănNo ratings yet
- Tap Changing Transformers Maintain Voltage LevelsDocument27 pagesTap Changing Transformers Maintain Voltage LevelsNadeesha BandaraNo ratings yet
- FOR Paralleling Module APM 2000Document4 pagesFOR Paralleling Module APM 2000Jaffer HussainNo ratings yet
- Flexible Ac Transmission Systems: Abstract - TDocument4 pagesFlexible Ac Transmission Systems: Abstract - TDhivya NNo ratings yet
- IEEE PE ProjectDocument9 pagesIEEE PE ProjectparashuramNo ratings yet
- Optimal Distribution Voltage Control and Co-Ordination With Distributed GenerationDocument13 pagesOptimal Distribution Voltage Control and Co-Ordination With Distributed GenerationShelton S S SheltonNo ratings yet
- AC Lines SVS CompensationDocument8 pagesAC Lines SVS CompensationSagar ThakerNo ratings yet
- Power Electronic Module - Chapter 5Document36 pagesPower Electronic Module - Chapter 5jayxcellNo ratings yet
- Unit 1: The Power System Overview and ModelingDocument8 pagesUnit 1: The Power System Overview and ModelingIhuhwa Marta TauNo ratings yet
- Design Calculations of Thrust Blocks at Lower Indira: L&T Construction Water & Effluent Treatment ICDocument3 pagesDesign Calculations of Thrust Blocks at Lower Indira: L&T Construction Water & Effluent Treatment IClagnajit dasNo ratings yet
- Ship Construction: Second Mates - HANDOUTDocument117 pagesShip Construction: Second Mates - HANDOUTmaneeshNo ratings yet
- 09 Exp 11 Buffer SolutionsDocument8 pages09 Exp 11 Buffer SolutionsShainmaugne AdvientoNo ratings yet
- Giddings & Lewis Sect08 HydDocument24 pagesGiddings & Lewis Sect08 HydAngel AdautaNo ratings yet
- Bosch EBike Product Catalogue MY2021 enDocument92 pagesBosch EBike Product Catalogue MY2021 enIvanNo ratings yet
- Hook and Eye-Stories Form The MarginsDocument220 pagesHook and Eye-Stories Form The MarginsJefferson LiinNo ratings yet
- RCS England Trainees Guide To A Quality Improvement Project 2021Document17 pagesRCS England Trainees Guide To A Quality Improvement Project 2021Wee K WeiNo ratings yet
- Postmodern EthicsDocument1 pagePostmodern Ethicsgeorge elerickNo ratings yet
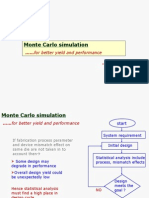
- Cadence Monte Carlo Simulation TutorialDocument51 pagesCadence Monte Carlo Simulation Tutorialkuomatt100% (1)
- AABB Accredited DNA Testing FacilitiesDocument2 pagesAABB Accredited DNA Testing Facilitiesjosueduran75No ratings yet
- Kapla ResumeDocument35 pagesKapla ResumeAbinashNo ratings yet
- Rules For The CertificationDocument84 pagesRules For The CertificationhdelriovNo ratings yet
- Deskripsi (Caffein)Document4 pagesDeskripsi (Caffein)jibefahlaNo ratings yet
- AbstractDocument2 pagesAbstractramyaNo ratings yet
- Brief History About Volley BallDocument1 pageBrief History About Volley BallAmbrad, Merlyn H.No ratings yet
- CHS-WWW - Polsteel. TUBOS METALICOS PDFDocument3 pagesCHS-WWW - Polsteel. TUBOS METALICOS PDFEduardo TorreNo ratings yet
- API 510 BasicsDocument40 pagesAPI 510 BasicsBalakumarNo ratings yet
- Proximity Sensing and Warning Technology For Heavy Construction Equipment OperationDocument10 pagesProximity Sensing and Warning Technology For Heavy Construction Equipment OperationAnand ReddyNo ratings yet
- SteelsDocument72 pagesSteelsLLNo ratings yet
- Pip Venix LRDocument2 pagesPip Venix LRThanh VoNo ratings yet
- Thalassemia: Submitted By: Jovan Pierre C. Ouano Submitted To: Mark Gil T. DacutanDocument8 pagesThalassemia: Submitted By: Jovan Pierre C. Ouano Submitted To: Mark Gil T. DacutanJvnpierre AberricanNo ratings yet
- Meralco Bill 330370940102 04142023Document2 pagesMeralco Bill 330370940102 04142023Jha CruzNo ratings yet
- Saej401v002 PDFDocument6 pagesSaej401v002 PDFLuis LujanoNo ratings yet
- IP Modulator User's Guide - Oct - 09Document68 pagesIP Modulator User's Guide - Oct - 09reivajjwNo ratings yet
- A Thing of Beauty Analysis by Sharvaree S. ChavanDocument12 pagesA Thing of Beauty Analysis by Sharvaree S. Chavansharu11No ratings yet
- Pharmaceutical Ingredients and Excipient - LastpptDocument72 pagesPharmaceutical Ingredients and Excipient - LastpptFANTANo ratings yet
- MidtermDocument3 pagesMidtermTrisha MondonedoNo ratings yet
- CD 0400 CH 4 X 100 ML: For in Vitro Diagnostic Use Only. LinearityDocument1 pageCD 0400 CH 4 X 100 ML: For in Vitro Diagnostic Use Only. LinearityNguyễn ThơiNo ratings yet
- Zenopus ClassicDocument32 pagesZenopus Classicserenity42No ratings yet