You might also like
- Coordinated RRRP 2 Pos InversionDocument5 pagesCoordinated RRRP 2 Pos Inversionaiman.mohammadNo ratings yet
- Coordinated RRRP 3 Pos InversionDocument2 pagesCoordinated RRRP 3 Pos Inversiondomagix470No ratings yet
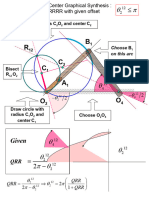
- Dead Center Synthesis RRRPDocument3 pagesDead Center Synthesis RRRPdomagix470No ratings yet
- Coordinated RRRP 3 Pos PolesDocument3 pagesCoordinated RRRP 3 Pos Polesdomagix470No ratings yet
- Dead Center Synthesis RRRRDocument2 pagesDead Center Synthesis RRRRdomagix470No ratings yet
- Coordinated RRRR 2 Pos PolesDocument3 pagesCoordinated RRRR 2 Pos Polesdomagix470No ratings yet
- Poles RRRPDocument7 pagesPoles RRRPdomagix470No ratings yet
- 05 Wiring Diagram PDFDocument7 pages05 Wiring Diagram PDFJorge Tom Simpson CruzNo ratings yet
- Note 29 Nov 2023Document9 pagesNote 29 Nov 2023saftaNo ratings yet
- 143 FlückigerDocument7 pages143 Flückigerangesoukaina216No ratings yet
- Assignment - Combinational & Sequential LogicDocument2 pagesAssignment - Combinational & Sequential LogicUsman Faizyab KhanNo ratings yet
- Note 23 Aug 2022Document6 pagesNote 23 Aug 2022Aditya SharmaNo ratings yet
- SW1 SW2 SW3 SW4 SW5 SW6 SW7 SW8 SW9 SW10: PCB Ifresi:1269Document1 pageSW1 SW2 SW3 SW4 SW5 SW6 SW7 SW8 SW9 SW10: PCB Ifresi:1269jesus curielNo ratings yet
- Applied Physics Report Lab 2.0Document9 pagesApplied Physics Report Lab 2.0231306No ratings yet
- SCH - QD DRVR 13en.01Document1 pageSCH - QD DRVR 13en.01fthsxNo ratings yet
- Current Electricity-09-Subjective and Objective SolutionsDocument26 pagesCurrent Electricity-09-Subjective and Objective SolutionsRaju SinghNo ratings yet
- Imaging Basics 6Document4 pagesImaging Basics 6rajasekhar617No ratings yet
- 2 JOB SHEET-Elecro-Pneumatics 2Document26 pages2 JOB SHEET-Elecro-Pneumatics 2ardiyantoNo ratings yet
- Taguig City University: Computer Science DepartmentDocument3 pagesTaguig City University: Computer Science DepartmentVictor JavilloNo ratings yet
- Tle 4726 IacDocument23 pagesTle 4726 Iacfreddys merchanNo ratings yet
- Quad Low Side Driver: Multipower BCD TechnologyDocument9 pagesQuad Low Side Driver: Multipower BCD TechnologySidnei100% (1)
- 4 Devre3Document1 page4 Devre3hargaksbot1No ratings yet
- SN 75374Document19 pagesSN 75374Nahuel RmNo ratings yet
- SP490E / SP491E: Enhanced Full-Duplex RS-485 TransceiversDocument13 pagesSP490E / SP491E: Enhanced Full-Duplex RS-485 TransceiversThomas ThomasNo ratings yet
- Sin J Cos E: Using The Euler Identity I.EDocument4 pagesSin J Cos E: Using The Euler Identity I.EMuhammad HamzaNo ratings yet
- Rotational Motion - Miscellaneous SolutionsDocument16 pagesRotational Motion - Miscellaneous SolutionsJee AspirantNo ratings yet
- Biquad Filter PDFDocument5 pagesBiquad Filter PDFpcjoshi02100% (1)
- Schematic - TL494 4 - 2021-12-18Document1 pageSchematic - TL494 4 - 2021-12-18my dreamNo ratings yet
- SN74AVC4 DatasheetDocument19 pagesSN74AVC4 Datasheetzigmund zigmundNo ratings yet
- Fiitjee All India Integrated Test Series: JEE (Main) - 2020 Answers, Hints & SolutionsDocument20 pagesFiitjee All India Integrated Test Series: JEE (Main) - 2020 Answers, Hints & SolutionsKaranNo ratings yet
- Datasheet SN3218Document12 pagesDatasheet SN3218Daniel SilvaNo ratings yet
- Motor Designs A, B, C, DDocument25 pagesMotor Designs A, B, C, Dqwertyui123321No ratings yet
- Vi-Unit - D-A & A-D ConvertersDocument35 pagesVi-Unit - D-A & A-D ConvertersspandanaNo ratings yet
- SN54F32, SN74F32 Quadruple 2-Input Positive-Or Gates: DescriptionDocument19 pagesSN54F32, SN74F32 Quadruple 2-Input Positive-Or Gates: DescriptionAlfonso BlancoNo ratings yet
- Drive of 8-Digit 7-Segment DisplayDocument2 pagesDrive of 8-Digit 7-Segment Displayabba123No ratings yet
- Electric Field On Semi Circular RodDocument2 pagesElectric Field On Semi Circular RodRaghuRamNo ratings yet
- tl431 ReguladorDocument79 pagestl431 ReguladoriloalNo ratings yet
- TL431 PDFDocument79 pagesTL431 PDFejdigger ejNo ratings yet
- SP490E/SP491E Enhanced Full Duplex RS-485 Transceivers: DescriptionDocument12 pagesSP490E/SP491E Enhanced Full Duplex RS-485 Transceivers: DescriptionCarlos AcostaNo ratings yet
- Ifv (T) V Sin (T) A Sin, Derive The Expressions For A andDocument12 pagesIfv (T) V Sin (T) A Sin, Derive The Expressions For A andWESTLY JUCONo ratings yet
- Nodal Analysis & Mesh AnalysisDocument26 pagesNodal Analysis & Mesh Analysisa7med SoulimanNo ratings yet
- BP5828CJ EN DS Rev 1.0Document9 pagesBP5828CJ EN DS Rev 1.0Vishal dtuNo ratings yet
- Power Electronics - Chapter 4 - Rectifiers AnalysisDocument40 pagesPower Electronics - Chapter 4 - Rectifiers Analysiskennedy kipsangNo ratings yet
- 3 1eDocument1 page3 1eanisettimanikantaNo ratings yet
- Ske Job 6 AriDocument1 pageSke Job 6 Ariiqbalmuttasir146No ratings yet
- Cascading Method of Signal Elimination: Reversing ValvesDocument5 pagesCascading Method of Signal Elimination: Reversing ValvesHans Paolo Palomaria CamNo ratings yet
- Mach Bao Ve Chap TaiDocument1 pageMach Bao Ve Chap Taidinh vinh nguyenNo ratings yet
- Dual 4-Channel Analog Multiplexer/Demultiplexer AZ4052Document18 pagesDual 4-Channel Analog Multiplexer/Demultiplexer AZ4052norgenNo ratings yet
- Axoloti Core SCH v10Document9 pagesAxoloti Core SCH v10klinikNo ratings yet
- Section 5 - Induction Motor Drive PDFDocument55 pagesSection 5 - Induction Motor Drive PDFlalitbickNo ratings yet
- Ac Nodal and Mesh AnalysisDocument26 pagesAc Nodal and Mesh AnalysissuchiNo ratings yet
- 1 PDFDocument1 page1 PDFВиталий ИвановNo ratings yet
- Flow Rate MeasurementDocument6 pagesFlow Rate Measurementusebio64No ratings yet
- Schematic - RC Car Receiver Circuit - 2024-01-09Document1 pageSchematic - RC Car Receiver Circuit - 2024-01-09Priyanshu SilNo ratings yet
- Gpmw5019b Fast Charge 5v 2coil - V32Document5 pagesGpmw5019b Fast Charge 5v 2coil - V32Anonymous S9Cvxf2KA6No ratings yet
- High Performance 2A Uldo Linear Regulator: ApplicationsDocument11 pagesHigh Performance 2A Uldo Linear Regulator: ApplicationsStuxnetNo ratings yet
- S3a New Spindle Driver PDFDocument35 pagesS3a New Spindle Driver PDFHubertvcNo ratings yet
- Anaphy Lec 1Document2 pagesAnaphy Lec 1Kiana SanchezNo ratings yet
- Please Get Rid of That SmellDocument4 pagesPlease Get Rid of That Smellmcant1980No ratings yet
- TGA User ManualDocument310 pagesTGA User Manualfco85100% (1)
- Language and The Pursuit of Hap - Chalmers BrothersDocument1,184 pagesLanguage and The Pursuit of Hap - Chalmers BrothersGeorge Adrian Oprea100% (2)
- Payaman KamiDocument35 pagesPayaman Kamifaye tamayoNo ratings yet
- RBI Assistant Prelims 14 Feb 2020 Memory Based Paper (English)Document27 pagesRBI Assistant Prelims 14 Feb 2020 Memory Based Paper (English)AbhiNo ratings yet
- ECE - 1551 Digital Logic Lecture 15: Combinational Circuits: Assistant Prof. Fareena SaqibDocument19 pagesECE - 1551 Digital Logic Lecture 15: Combinational Circuits: Assistant Prof. Fareena SaqibAll aboutNo ratings yet
- Highway Weigh-In-Motion (WIM) Systems With User Requirements and Test MethodsDocument18 pagesHighway Weigh-In-Motion (WIM) Systems With User Requirements and Test MethodsFayyaz Ahmad KhanNo ratings yet
- RiskWISE Import Template StorageTank 11-Aug-2018 145718412Document41 pagesRiskWISE Import Template StorageTank 11-Aug-2018 145718412irfanlarikhotmailcomNo ratings yet
- Calculation of Pipe SupportDocument6 pagesCalculation of Pipe Supportnaveen_86No ratings yet
- MicroStructPy A Statistical Microstructure Mesh GeDocument6 pagesMicroStructPy A Statistical Microstructure Mesh GeMike JohanssenNo ratings yet
- 15 TribonDocument10 pages15 Tribonlequanghung98No ratings yet
- Phonological Translation in Translation Texts Download TableDocument1 pagePhonological Translation in Translation Texts Download Tablelinl04023No ratings yet
- Nielsen Millennial Traveler Study Jan 2017Document11 pagesNielsen Millennial Traveler Study Jan 2017nhocti1610No ratings yet
- Physics Notes AJk 9th Class Chap6Document3 pagesPhysics Notes AJk 9th Class Chap6Khizer Tariq QureshiNo ratings yet
- Hot-Rolled Steel Beam Calculation To AISC 360-16Document2 pagesHot-Rolled Steel Beam Calculation To AISC 360-16vanda_686788867No ratings yet
- The Awakening Study Guide AnswersDocument24 pagesThe Awakening Study Guide AnswersAli RidhaNo ratings yet
- Last Boat Not Least - An Unofficial Adventure For Fallout 2d20Document14 pagesLast Boat Not Least - An Unofficial Adventure For Fallout 2d20Veritas Veritati100% (3)
- 1570-Article Text-4693-1-10-20190709Document18 pages1570-Article Text-4693-1-10-20190709Innocent PhiriNo ratings yet
- Route TrainingDocument14 pagesRoute Trainingjohn100% (1)
- Bash SHELL Script in LinuxDocument6 pagesBash SHELL Script in LinuxHesti WidyaNo ratings yet
- Transitive & Intransitive Verbs: Grammar PracticeDocument5 pagesTransitive & Intransitive Verbs: Grammar PracticeSzeman YipNo ratings yet
- Estadistica MultivariableDocument360 pagesEstadistica MultivariableHarley Pino MuñozNo ratings yet
- Tanner EDA Tools v16.3 Release NotesDocument60 pagesTanner EDA Tools v16.3 Release NotesMohiuddin Mohammad100% (1)
- Computer Architecture and Organization: Intel 80386 ProcessorDocument15 pagesComputer Architecture and Organization: Intel 80386 ProcessorAtishay GoyalNo ratings yet
- The Future of Humanity ProjectDocument8 pagesThe Future of Humanity Projectapi-563597519No ratings yet
- British Cost Accounting 1887-1952 PreviewDocument27 pagesBritish Cost Accounting 1887-1952 PreviewJessica JessNo ratings yet
- MAE 320 Syllabus PDFDocument4 pagesMAE 320 Syllabus PDFRobert V. AbrasaldoNo ratings yet
- BDC Questions and AnswersDocument14 pagesBDC Questions and AnswerssatishNo ratings yet
- Pugh ChartDocument1 pagePugh Chartapi-92134725No ratings yet