You might also like
- FIR and IIR Filter Design Using Matlab: Prof. C.M KyungDocument12 pagesFIR and IIR Filter Design Using Matlab: Prof. C.M Kyungmailme4121No ratings yet
- ECE411 - 4c - The Z-Transform - Problem Set 1Document2 pagesECE411 - 4c - The Z-Transform - Problem Set 1Martine JimenezNo ratings yet
- Signal Processing Final Project Report On Multirate Signal ProcessingDocument9 pagesSignal Processing Final Project Report On Multirate Signal ProcessingDhruv HirparaNo ratings yet
- Ideal Filters: S X N S N yDocument26 pagesIdeal Filters: S X N S N ydanielNo ratings yet
- 7 FirDocument26 pages7 FirBala MuruganNo ratings yet
- Finite Impulse Response (FIR) FiltersDocument39 pagesFinite Impulse Response (FIR) FiltersMike Vincent RagayNo ratings yet
- 9.lecture LabDocument12 pages9.lecture LabMekonen AberaNo ratings yet
- Compdsp Allie IIRFilterDocument33 pagesCompdsp Allie IIRFilterapi-3826975No ratings yet
- 9-Design IIR Filters UpdatedDocument23 pages9-Design IIR Filters Updatedfigob33370No ratings yet
- Inverse Kinematics For A Rhino RobotDocument11 pagesInverse Kinematics For A Rhino RobotsolteanNo ratings yet
- Digital Logic Design - RevisionDocument676 pagesDigital Logic Design - RevisionGanesh ThapaNo ratings yet
- Wavelets and Filter Banks: 4C8 Integrated Systems DesignDocument41 pagesWavelets and Filter Banks: 4C8 Integrated Systems DesignShabeeb Ali OruvangaraNo ratings yet
- Chapter 2Document16 pagesChapter 2eng.rayan1996No ratings yet
- Group Delay IllustrationDocument8 pagesGroup Delay IllustrationNguyen Anh DucNo ratings yet
- Supplement FIR FiltersDocument32 pagesSupplement FIR FiltersSABHASACHI POBINo ratings yet
- Ideal Filters: S X N S N yDocument26 pagesIdeal Filters: S X N S N yPreethiNo ratings yet
- Unit IV Fir Design Lecture NotesDocument18 pagesUnit IV Fir Design Lecture NotesramuamtNo ratings yet
- Digital Image Processing: Lecture 8 and 9Document34 pagesDigital Image Processing: Lecture 8 and 9nnehasinghNo ratings yet
- Chapter 5b Difference EquationDocument15 pagesChapter 5b Difference Equationfarina ilyanaNo ratings yet
- Finite Impulse Response (FIR) FiltersDocument39 pagesFinite Impulse Response (FIR) Filtersਜੋਤ ਸਰਬNo ratings yet
- Frequency Response Analysis and Bode PlotDocument44 pagesFrequency Response Analysis and Bode PlotRajendar PonagantiNo ratings yet
- Chapter-3 Adsp: Digital Filter StructuresDocument42 pagesChapter-3 Adsp: Digital Filter Structureshusiyyoo mustefaNo ratings yet
- K - PPT - Simple Regression and CorrelationDocument21 pagesK - PPT - Simple Regression and CorrelationDhara MehtaNo ratings yet
- Unit III FIR Filter DesignDocument89 pagesUnit III FIR Filter DesignBp PbNo ratings yet
- Objectives:: Design of Iir FiltersDocument9 pagesObjectives:: Design of Iir FiltersItkalkarShaileshNo ratings yet
- Digital Signal Processing - U4Document82 pagesDigital Signal Processing - U4Ashok BattulaNo ratings yet
- Introduction To Deconvolution and InversionDocument49 pagesIntroduction To Deconvolution and InversionHadi HendizadehNo ratings yet
- DSP - TerminologiesDocument14 pagesDSP - TerminologiesRicky JunioNo ratings yet
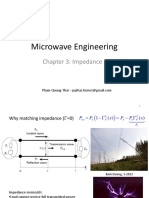
- Microwave Engineering: Chapter 3: Impedance MatchingDocument19 pagesMicrowave Engineering: Chapter 3: Impedance MatchingLê NamNo ratings yet
- E 5 EqDocument56 pagesE 5 EqMehwish AliNo ratings yet
- Microwave Engineering: Chapter 2.2: Reflection CoefficientDocument14 pagesMicrowave Engineering: Chapter 2.2: Reflection CoefficientLê NamNo ratings yet
- Digital Signal Processing: IIR Filter DesignDocument24 pagesDigital Signal Processing: IIR Filter DesignRaihan JamiNo ratings yet
- Parallel and Pipeline Implementations of IIR Low Pass Filter On FPGA 1 PDFDocument12 pagesParallel and Pipeline Implementations of IIR Low Pass Filter On FPGA 1 PDFBiswajit Kumar SinghNo ratings yet
- EE423 Lecture 15 - Introduction To Digital FiltersDocument50 pagesEE423 Lecture 15 - Introduction To Digital FiltersAqNo ratings yet
- (14 - 1) Filter (2) Pole - Zero v2Document18 pages(14 - 1) Filter (2) Pole - Zero v2najla harzaNo ratings yet
- (13 - 2) Digital FilterDocument24 pages(13 - 2) Digital Filternajla harzaNo ratings yet
- Introduction About IIRDocument26 pagesIntroduction About IIRPhúc NguyễnNo ratings yet
- Difference Between Iir Filter Difference Between Iir Filter and Fir FilterDocument12 pagesDifference Between Iir Filter Difference Between Iir Filter and Fir FiltersameerbsetNo ratings yet
- Generating and Processing Random SignalsDocument56 pagesGenerating and Processing Random SignalssamfgNo ratings yet
- Potassium Enz Cobas c-701 702Document2 pagesPotassium Enz Cobas c-701 702MaherNo ratings yet
- Ch5-Dsp Design DFDocument37 pagesCh5-Dsp Design DFtrucquynhtudoanNo ratings yet
- Data Terbaru + Output SPSSDocument52 pagesData Terbaru + Output SPSSAmbar WatiNo ratings yet
- First Order - Second Order Iir FiltersDocument4 pagesFirst Order - Second Order Iir FiltersKrishna PriyaNo ratings yet
- Chapter 4 2 HandoutsDocument68 pagesChapter 4 2 Handoutsmeseret sisayNo ratings yet
- Models For The Layout ProblemDocument26 pagesModels For The Layout ProblemHendriik ViicarloNo ratings yet
- 2333 211109 Linear Regression TaggedDocument22 pages2333 211109 Linear Regression TaggedJorge CastilloNo ratings yet
- Infi Nite Impulse Response Filters: Yn BXNK AynlDocument44 pagesInfi Nite Impulse Response Filters: Yn BXNK AynlPirata kalyNo ratings yet
- B. Frequency Domain Representation of Lti Systems: ObjectiveDocument4 pagesB. Frequency Domain Representation of Lti Systems: Objectivenaiksuresh100% (1)
- CH 05Document59 pagesCH 05Dan StrutheNo ratings yet
- Chapter - 4 (Part - B)Document33 pagesChapter - 4 (Part - B)Kishowloy DattaNo ratings yet
- TKPS - Discrete-Time Filter DesignDocument29 pagesTKPS - Discrete-Time Filter DesignSudirman MaliangNo ratings yet
- A Beginner's Guide To Cascaded Integrator-Comb (CIC) FiltersDocument17 pagesA Beginner's Guide To Cascaded Integrator-Comb (CIC) FiltersAKHIL C SUNNYNo ratings yet
- Fir and Iir Transfer Functions: Yn HKXNK Yz HZXZDocument39 pagesFir and Iir Transfer Functions: Yn HKXNK Yz HZXZKAKUL SHRIVASTAVANo ratings yet
- Frequency Response Methods and StabilityDocument68 pagesFrequency Response Methods and Stabilityfaisal aminNo ratings yet
- EE2703 End Sem IITM, May 22Document6 pagesEE2703 End Sem IITM, May 22Jayant KumarNo ratings yet
- Simple Linear RegressionDocument63 pagesSimple Linear RegressionEtibar AslanovNo ratings yet
- F 06 ZtransfDocument6 pagesF 06 ZtransfNawal LubbadNo ratings yet
- 2.161 Signal Processing: Continuous and Discrete: Mit OpencoursewareDocument13 pages2.161 Signal Processing: Continuous and Discrete: Mit Opencoursewarewocow86903No ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- 2.signal and Linear System AnalysisDocument42 pages2.signal and Linear System Analysis390f.lkajfiNo ratings yet
- FiltersDocument123 pagesFiltersMy HomeNo ratings yet
- Unit I Two Marks:: Infinite Impulse Response Digital Filters & Unit-Iii: Finite Impulse Response Digital FiltersDocument3 pagesUnit I Two Marks:: Infinite Impulse Response Digital Filters & Unit-Iii: Finite Impulse Response Digital FiltersMoganambal MoganaNo ratings yet
- Band Pass Filter Design Part 3. Band Pass Filters From First Principles Richard Harris G3OTKDocument4 pagesBand Pass Filter Design Part 3. Band Pass Filters From First Principles Richard Harris G3OTKopachecoNo ratings yet
- Design Waveguide Bandpass FiltersDocument6 pagesDesign Waveguide Bandpass FiltersAmador Garcia IIINo ratings yet
- Introduction To RF Filter Design: RF Electronics Spring, 2018 Robert R. Krchnavek Rowan UniversityDocument47 pagesIntroduction To RF Filter Design: RF Electronics Spring, 2018 Robert R. Krchnavek Rowan UniversityBisuNo ratings yet
- DSP 2 Marks Q&a1Document38 pagesDSP 2 Marks Q&a1shankarNo ratings yet
- Lec 11Document18 pagesLec 11uday singh meenaNo ratings yet
- Active FiltersDocument1,041 pagesActive FilterstnaingooNo ratings yet
- ELEC4502 Microwave Circuits Project 1 - Design of An Mic Edge-Coupled Band-Pass FilterDocument8 pagesELEC4502 Microwave Circuits Project 1 - Design of An Mic Edge-Coupled Band-Pass FilterRabbia SalmanNo ratings yet
- Interpolated FIR Filter (MITRA)Document8 pagesInterpolated FIR Filter (MITRA)Brandon HerreraNo ratings yet
- 12 ResonanceDocument24 pages12 ResonanceHubert SemenianoNo ratings yet
- SBZV WyahDocument6 pagesSBZV WyahGabriela Grace SinagaNo ratings yet
- Notch FilterDocument27 pagesNotch FilterRhamde PillogoNo ratings yet
- Sistema Inestable: Bode DiagramDocument2 pagesSistema Inestable: Bode DiagramFrancisco HernandezNo ratings yet
- DSP QBDocument8 pagesDSP QBSaibala PattabiramanNo ratings yet
- PS403 - Digital Signal Processing: 5. DSP - Non-Recursive (FIR) Digital FiltersDocument51 pagesPS403 - Digital Signal Processing: 5. DSP - Non-Recursive (FIR) Digital FiltersdumbabubuNo ratings yet
- Fir Filter Design: The Window Design MethodDocument13 pagesFir Filter Design: The Window Design MethodhimNo ratings yet
- Mitra Ch13 3edDocument9 pagesMitra Ch13 3edMohammad Khairul Halim RimonNo ratings yet
- Nurmi Arttu ValtteriDocument94 pagesNurmi Arttu ValtteriPál HústalzNo ratings yet
- Band Pass Filter Design Part 2. Band Pass Filters From First Principles Richard Harris G3OTKDocument11 pagesBand Pass Filter Design Part 2. Band Pass Filters From First Principles Richard Harris G3OTKopachecoNo ratings yet
- Assignment For B.Tech ECE: X N X KDocument3 pagesAssignment For B.Tech ECE: X N X KTanmay GoelNo ratings yet
- Higher Order Filter Options: - Cascade of BiquadsDocument14 pagesHigher Order Filter Options: - Cascade of BiquadsPushpendra DwivediNo ratings yet
- Single-Amplifier-Biquad (SAB) Filter Sections: ESE319 Introduction To MicroelectronicsDocument27 pagesSingle-Amplifier-Biquad (SAB) Filter Sections: ESE319 Introduction To MicroelectronicsAnimesh JainNo ratings yet
- Muhammad Jawad Shakil 20i-1316: Lab TutorialDocument10 pagesMuhammad Jawad Shakil 20i-1316: Lab TutorialJafar HussainNo ratings yet
- Design and Implementation of Butterworth, Chebyshev-I and Elliptic Filter For Speech Signal AnalysisDocument7 pagesDesign and Implementation of Butterworth, Chebyshev-I and Elliptic Filter For Speech Signal AnalysisrectifiedNo ratings yet
- DSP FormulasDocument14 pagesDSP FormulasfmsarwarNo ratings yet
- High-Pass, Band-Pass and Band-Reject FiltersDocument3 pagesHigh-Pass, Band-Pass and Band-Reject FiltersÁSädKHänNo ratings yet
- 29 DT Fir FiltersDocument16 pages29 DT Fir FiltersahmdNo ratings yet
- Advanced Digital SystemsDocument50 pagesAdvanced Digital SystemsFaazil FairoozNo ratings yet