You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Power System Transient Stability Analysis Using EtAPDocument6 pagesPower System Transient Stability Analysis Using EtAPsamirparida81100% (1)
- Kestrel Chapter 6 - Power System StabilizersDocument10 pagesKestrel Chapter 6 - Power System StabilizerssulemankhalidNo ratings yet
- Out-Of-Step Protection Fundamentals and Advancements: BstractDocument26 pagesOut-Of-Step Protection Fundamentals and Advancements: BstractalimaghamiNo ratings yet
- MATLAB-Based Transient Stability Analysis of A Power SystemDocument34 pagesMATLAB-Based Transient Stability Analysis of A Power Systemsamarahmad2008479875% (4)
- UNIT-7 & 8 Transient Stability StudiesDocument35 pagesUNIT-7 & 8 Transient Stability StudiesVishalSinghNo ratings yet
- Small Signal Stability AnalysisDocument71 pagesSmall Signal Stability AnalysisRick Leon VasquezNo ratings yet
- Power Swing BlockingDocument1 pagePower Swing BlockingAbdul RahmanNo ratings yet
- Power System TransientsDocument11 pagesPower System TransientsKhairul AshrafNo ratings yet
- TG SynchronizationDocument7 pagesTG SynchronizationDurjoy ChakrabortyNo ratings yet
- Chapter 12Document23 pagesChapter 12sachin235No ratings yet
- Analysis of Power System StabilityDocument31 pagesAnalysis of Power System Stabilitytarnedo1100% (1)
- P Matlab y Estab TransitDocument4 pagesP Matlab y Estab TransitrdelgranadoNo ratings yet
- Unit V 1. Define Matrix Converter and Mention It Application. Matrix Converter ConceptDocument5 pagesUnit V 1. Define Matrix Converter and Mention It Application. Matrix Converter Conceptsambu112No ratings yet
- EEU801 Power System Stability: Dr. Kawita D. Thakur Government College of Engineering, AmravatiDocument20 pagesEEU801 Power System Stability: Dr. Kawita D. Thakur Government College of Engineering, AmravatiSominath HarneNo ratings yet
- A New Method For Detection of Faults During Power Swing Using Two-End MeasurementsDocument4 pagesA New Method For Detection of Faults During Power Swing Using Two-End MeasurementsFelix GamarraNo ratings yet
- PSS ControllerDocument14 pagesPSS ControllerAnonymous BBX2E87aHNo ratings yet
- Stability and Control - P. Kundur (Part01) PDFDocument600 pagesStability and Control - P. Kundur (Part01) PDFJimena Rafael LeónNo ratings yet
- Solution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemDocument6 pagesSolution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
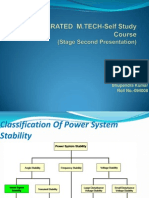
- Bhupendra Kumar Roll No.-094008: Submitted byDocument36 pagesBhupendra Kumar Roll No.-094008: Submitted bytarnedo1No ratings yet
- A Setting-Free Approach To Detecting Loss of Excitation in Synchronous GeneratorsDocument24 pagesA Setting-Free Approach To Detecting Loss of Excitation in Synchronous GeneratorsGhaith AlqudahNo ratings yet
- HVDC - Pat 2 - AnswwersDocument27 pagesHVDC - Pat 2 - AnswwersFundayyy moviesNo ratings yet
- Stability Terms+Defs DraftDocument10 pagesStability Terms+Defs DraftKhy-khy PutraNo ratings yet
- Gen - Prot WcpyrtDocument17 pagesGen - Prot WcpyrtAshwinKumar GoswamiNo ratings yet
- Mod 1 Lec 3 - Protection Paradigms SystemDocument23 pagesMod 1 Lec 3 - Protection Paradigms Systemjck07No ratings yet
- Swing EquationDocument6 pagesSwing EquationVaibhav kumbhar100% (1)
- Influence of DC Component During Inadvertent Operation of The High Voltage Generator Circuit Breaker During Mis-SynchronizationDocument11 pagesInfluence of DC Component During Inadvertent Operation of The High Voltage Generator Circuit Breaker During Mis-SynchronizationVikas VernekarNo ratings yet
- Out-Of-step Protection For Generators GER-3179Document28 pagesOut-Of-step Protection For Generators GER-3179robertoseniorNo ratings yet
- Anderson ADocument11 pagesAnderson Acrisis_zNo ratings yet
- Voltage StabilityDocument27 pagesVoltage StabilityDevendra SharmaNo ratings yet
- Power System StabilityDocument29 pagesPower System StabilityRanieri BenčićNo ratings yet
- CAPA Chapter 4Document56 pagesCAPA Chapter 4daveadeNo ratings yet
- Unit-3 PsocDocument23 pagesUnit-3 PsocDESI BRAHMNNo ratings yet
- Unit VDocument29 pagesUnit Vv.saigeetha lakshmiNo ratings yet
- B. System ProblemsDocument12 pagesB. System ProblemsmeeNo ratings yet
- Evaluating Motor and Transformer Inrush CurrentsDocument4 pagesEvaluating Motor and Transformer Inrush CurrentsMind of BeautyNo ratings yet
- Cep PsocDocument31 pagesCep PsocEhtisham RajpootNo ratings yet
- Electrical Engineering Engineering Power System Analysis and Stability Stability Studies NotesDocument32 pagesElectrical Engineering Engineering Power System Analysis and Stability Stability Studies NotesAliEjazNo ratings yet
- VOLUME 1 - General Notes On Transient Stability & Control - FinalDocument253 pagesVOLUME 1 - General Notes On Transient Stability & Control - FinalOoi Ban JuanNo ratings yet
- 3.0 Expt No 03Document4 pages3.0 Expt No 03YASH KHATPENo ratings yet
- 17th International Conference On Electrical, Electronics and Systems Engineering December 21 - 22, 2015 Istanbul, TurkeyDocument47 pages17th International Conference On Electrical, Electronics and Systems Engineering December 21 - 22, 2015 Istanbul, TurkeyPraveen Nayak BhukyaNo ratings yet
- Modeling and Analysis of The Synchronous Generators Excitation SystemsDocument7 pagesModeling and Analysis of The Synchronous Generators Excitation Systemsni60No ratings yet
- 2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet ManjhiDocument10 pages2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet Manjhirobertovm2002No ratings yet
- 11 - Chapter 3 PDFDocument15 pages11 - Chapter 3 PDFTufail AlamNo ratings yet
- Fig. 1a. Overlaid Plot of Voltage (Blue) and Rms Current (Red) of A Motor Start As A Function ofDocument5 pagesFig. 1a. Overlaid Plot of Voltage (Blue) and Rms Current (Red) of A Motor Start As A Function ofTapi SkNo ratings yet
- Lec 1Document28 pagesLec 1ahmedibrahim4260No ratings yet
- Main ProjectDocument25 pagesMain Project_imsandeepNo ratings yet
- Frequency RelayDocument9 pagesFrequency RelayLanya AramNo ratings yet
- Reactive Power ControlDocument183 pagesReactive Power ControlAmberMeerabNo ratings yet
- Load Frequency ControlDocument5 pagesLoad Frequency Controlsrikaanth06100% (2)
- Electrical MachinesDocument22 pagesElectrical MachinesJoshtyler 21No ratings yet
- Pages From 10.11648.j.eas.20180301.12-2Document2 pagesPages From 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- Chapter ThreeDocument31 pagesChapter Threehabte gebreial shrashrNo ratings yet
- Transient Stability Analysis of Synchronous Generator in Electrical NetworkDocument5 pagesTransient Stability Analysis of Synchronous Generator in Electrical NetworkSadil BatafNo ratings yet
- A B C A B C: Load Generator 1Document19 pagesA B C A B C: Load Generator 1Oscar Bryan MagtibayNo ratings yet
- Power System Stability-Chapter 3Document84 pagesPower System Stability-Chapter 3Du TrầnNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Introduction To Market Operations by Engr E.A EsanDocument31 pagesIntroduction To Market Operations by Engr E.A EsanTEMIDAYONo ratings yet
- Grid and Commercial Metering by OlayanjuDocument35 pagesGrid and Commercial Metering by OlayanjuTEMIDAYONo ratings yet
- Table of Contents Test RunDocument52 pagesTable of Contents Test RunTEMIDAYONo ratings yet
- NPAG CompleteDocument792 pagesNPAG CompleteTEMIDAYONo ratings yet
- Engr Josh ReportDocument85 pagesEngr Josh ReportTEMIDAYONo ratings yet
- Summary of Fault-AnalysisDocument15 pagesSummary of Fault-AnalysisTEMIDAYONo ratings yet
- Introduction To Preventive MaintenanceDocument11 pagesIntroduction To Preventive MaintenanceTEMIDAYONo ratings yet
- Transformer Connections and Vectors 2009 8Document46 pagesTransformer Connections and Vectors 2009 8TEMIDAYONo ratings yet
- 2020 2021 Power Students-1Document2 pages2020 2021 Power Students-1TEMIDAYONo ratings yet
- Technical ReportDocument50 pagesTechnical ReportTEMIDAYONo ratings yet
- Wacs 7000Document70 pagesWacs 7000Cris LuizNo ratings yet
- Service Manual: Color Television ReceiverDocument30 pagesService Manual: Color Television ReceiverAldo Fernando Guerra SantanderNo ratings yet
- Gipam 10 e 1303Document20 pagesGipam 10 e 1303Tu CongVanNo ratings yet
- Jaycar Speedo Corrector AA-3076Document4 pagesJaycar Speedo Corrector AA-3076CraigNo ratings yet
- Hardware in The Loop Simulation For Hybrid Electric Vehicles dSPACE - SAE - 0901 0198Document8 pagesHardware in The Loop Simulation For Hybrid Electric Vehicles dSPACE - SAE - 0901 0198nrayamNo ratings yet
- LG Du-42px12x Du-42px12xc CH Af-044a SMDocument28 pagesLG Du-42px12x Du-42px12xc CH Af-044a SMcomtronixNo ratings yet
- Thesis Topics On Wireless CommunicationDocument6 pagesThesis Topics On Wireless Communicationbsfp46eh100% (2)
- Nant ADocument12 pagesNant Atran quy don100% (1)
- 01 Lesson1. ElectrochemistryDocument11 pages01 Lesson1. ElectrochemistryBianca VacunawaNo ratings yet
- Students Email NameDocument6 pagesStudents Email NameAnil BhatiaNo ratings yet
- Enhance Data Rate For GSM EvolutionDocument13 pagesEnhance Data Rate For GSM EvolutionSaurabh VashishtaNo ratings yet
- DNV Standard For Cable LayingDocument3 pagesDNV Standard For Cable LayingSreekanth RaveendranNo ratings yet
- Engineering Utilities NotesDocument33 pagesEngineering Utilities NotesXenon AsuncionNo ratings yet
- NTS Mcqs Paper of Assistant Engineer OperationsDocument15 pagesNTS Mcqs Paper of Assistant Engineer OperationsZafar Islam ZafarNo ratings yet
- SME - Metal Enclosed SwitchgearsDocument4 pagesSME - Metal Enclosed SwitchgearsViorel BorsNo ratings yet
- Clarion DB235 Sound SystemDocument14 pagesClarion DB235 Sound SystemcozcatecatlianNo ratings yet
- Shift Register PDFDocument8 pagesShift Register PDFmahimaNo ratings yet
- Spec Sheet Mtu 12v4000 Ds1750 NeaDocument6 pagesSpec Sheet Mtu 12v4000 Ds1750 NeaTri Hudami WibowoNo ratings yet
- Lab7 Audio Ac97Document3 pagesLab7 Audio Ac97Dang DuyNo ratings yet
- Unit I Introduction To Cellular Mobile System 1.1.1. Conventional Mobile Telephone SystemsDocument14 pagesUnit I Introduction To Cellular Mobile System 1.1.1. Conventional Mobile Telephone SystemsGurkirat SinghNo ratings yet
- Scy5 - Notes Unit 5 ElectricityDocument11 pagesScy5 - Notes Unit 5 ElectricityMARIAYEE A/P PERUMAL MoeNo ratings yet
- Instruction Manual Portable LP400 - LP500 - LP600 - LP700 - LP850 - LP1000Document41 pagesInstruction Manual Portable LP400 - LP500 - LP600 - LP700 - LP850 - LP1000Carlos U. CallirgosNo ratings yet
- An Overview of Design Techniques For CMOS Phase DetectorsDocument4 pagesAn Overview of Design Techniques For CMOS Phase DetectorsfypcommNo ratings yet
- Chap2 SFGDocument41 pagesChap2 SFGBerentoNo ratings yet
- Capacimetro e Inductometro (Medidor LC)Document12 pagesCapacimetro e Inductometro (Medidor LC)afgr1990No ratings yet
- Manual de Utilizare Modul Smart GSM Pentru Automatizari Motorline M200Document52 pagesManual de Utilizare Modul Smart GSM Pentru Automatizari Motorline M200sergiu9886No ratings yet
- 385W PERC Module: JAM72S01 365-385/PRDocument2 pages385W PERC Module: JAM72S01 365-385/PRAmreican PrideNo ratings yet
- Owner's Operation Manual - 18,000 - 48,000Document15 pagesOwner's Operation Manual - 18,000 - 48,000Amine FadlaouiNo ratings yet
- Unit 2 - HEVDocument54 pagesUnit 2 - HEVsavitaNo ratings yet
- Aggregation Level and PDCCHDocument2 pagesAggregation Level and PDCCHMuhammad RizkiNo ratings yet