You might also like
- Aircraft Navigation SystemDocument19 pagesAircraft Navigation SystemAdrianne Mae Dimalanta100% (3)
- Radio Nav 310Document64 pagesRadio Nav 310kcott100% (10)
- Aircraft NavigationDocument28 pagesAircraft NavigationVinay Sriramoju100% (1)
- Aircraft NavigationDocument30 pagesAircraft NavigationSahala Rgk50% (2)
- Instrument Landing SystemDocument35 pagesInstrument Landing SystemDena EugenioNo ratings yet
- Navigatinal AidDocument29 pagesNavigatinal AidM.Tanseer Sibtain razaNo ratings yet
- Automated Landing Aids BY Fazeel Athar Saqib HussainDocument20 pagesAutomated Landing Aids BY Fazeel Athar Saqib HussainAir Cdre. Wajih Humayun Hashmi Assistant Professor-AviationNo ratings yet
- Navigation Aids System: Automatic Direction FinderDocument46 pagesNavigation Aids System: Automatic Direction FinderKaung MyatToeNo ratings yet
- ILSDocument35 pagesILSDawood waheedNo ratings yet
- Automatic Direction Finder: The Adf SystemDocument5 pagesAutomatic Direction Finder: The Adf Systemajaydce05No ratings yet
- Radio NavigationDocument157 pagesRadio NavigationCrypto StoreNo ratings yet
- 1-88 Veripos Book CompleteDocument88 pages1-88 Veripos Book CompleteLeonel Mejia LariosNo ratings yet
- Radio Navigation Aids in BriefDocument8 pagesRadio Navigation Aids in BriefZulfiqar MiraniNo ratings yet
- Adf & NDBDocument20 pagesAdf & NDBNier JavierNo ratings yet
- Basic Navigation Systems: - Automatic Direction Finder (Adf) - VHF Omnidirectional Range (VOR)Document53 pagesBasic Navigation Systems: - Automatic Direction Finder (Adf) - VHF Omnidirectional Range (VOR)pNo ratings yet
- ADF1Document20 pagesADF1tercyNo ratings yet
- Lecture 3 ADF NDB 1Document20 pagesLecture 3 ADF NDB 1NadineNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- NAV4Document62 pagesNAV4Dimo GrigorovNo ratings yet
- Dme ConceptDocument43 pagesDme Conceptkiran bogam100% (1)
- Global Training Manual Part2 PDFDocument427 pagesGlobal Training Manual Part2 PDFSreeja Sunder100% (1)
- SBSPDocument15 pagesSBSPzacklaws100% (1)
- MGGT PDFDocument46 pagesMGGT PDFchavez67% (3)
- HMT University Solved ProblemsDocument69 pagesHMT University Solved ProblemsKendra Kaiser60% (5)
- 1b. Overview Basic Navigation SystemDocument31 pages1b. Overview Basic Navigation SystemMuhammad Dzulfiqar RachmanNo ratings yet
- XASE18-Navigation SystemDocument105 pagesXASE18-Navigation SystemVigha Omnica Iyer100% (1)
- Aircraft Communication NavigationDocument94 pagesAircraft Communication NavigationVy Thoai100% (1)
- Hyperbolic Navigation SystemsDocument52 pagesHyperbolic Navigation Systemsebutakn100% (13)
- Instrument Approach: ILS MLS PAR Military GPS Waas Egnos Laas Jpals GCADocument8 pagesInstrument Approach: ILS MLS PAR Military GPS Waas Egnos Laas Jpals GCASheikh Mahmud HabibNo ratings yet
- ADF (Automatic Direction Finder)Document6 pagesADF (Automatic Direction Finder)gregmNo ratings yet
- NOn Directional BeaconDocument28 pagesNOn Directional BeaconFazi Imi83% (6)
- Vor Dme and NDB DraftDocument5 pagesVor Dme and NDB DraftJohn Kevin DiciembreNo ratings yet
- ADFDocument11 pagesADFManish MishraNo ratings yet
- Aircraft Electrical & Electronic Systems What Is Avionics?: ADF DME EAT EfisDocument8 pagesAircraft Electrical & Electronic Systems What Is Avionics?: ADF DME EAT EfisArslanKhanNo ratings yet
- RadNav Chp7 NDB ADFDocument56 pagesRadNav Chp7 NDB ADFNiyazi Cem GürsoyNo ratings yet
- Lecture 3-ADF & NDBDocument20 pagesLecture 3-ADF & NDBmelonybluebellNo ratings yet
- NOn Directional BeaconDocument23 pagesNOn Directional BeaconMohammed HeshamNo ratings yet
- Lecture 3 Adf NDBDocument20 pagesLecture 3 Adf NDBJohn DetrickNo ratings yet
- Lecture 3-Adf & NDBDocument20 pagesLecture 3-Adf & NDBzulianaNo ratings yet
- Electronic NavigationDocument39 pagesElectronic NavigationHans Marc SimplicioNo ratings yet
- Introduction To NavaidsDocument9 pagesIntroduction To Navaidsjei li100% (1)
- Ground-Based Navigation (Week 9)Document17 pagesGround-Based Navigation (Week 9)Shane VinceNo ratings yet
- Navigational Aids by AirDocument17 pagesNavigational Aids by Airjeffrey nambatacNo ratings yet
- NDB Google TranslateDocument3 pagesNDB Google TranslateDODOT AKWANDINo ratings yet
- Aircaft Avionics SystemDocument21 pagesAircaft Avionics SystemPavan KumarNo ratings yet
- Module 4Document66 pagesModule 4DELTA GAMINGNo ratings yet
- Non Directional BeaconDocument9 pagesNon Directional BeaconGivaldoNo ratings yet
- VOR VOR, Short For VHF Omni Directional Radio Range, Is A Type of Short-Range RadioDocument5 pagesVOR VOR, Short For VHF Omni Directional Radio Range, Is A Type of Short-Range Radionishat_chowdhuryNo ratings yet
- Relative Navigation SystemsDocument16 pagesRelative Navigation SystemsRaden Burhan100% (1)
- ADF (Automatic Direction Finder)Document7 pagesADF (Automatic Direction Finder)Kelvin SudaniNo ratings yet
- DME (Distance Measuring Equipment)Document6 pagesDME (Distance Measuring Equipment)ShEikh AzlanNo ratings yet
- Non Directional BeaconDocument11 pagesNon Directional BeaconBayu DewanggaNo ratings yet
- Non-Directional BeaconDocument7 pagesNon-Directional Beaconajrio1785No ratings yet
- Ishp BelDocument29 pagesIshp BelAlka Chawla100% (1)
- By: Kimberly P. ManaliliDocument11 pagesBy: Kimberly P. Manaliliian jheferNo ratings yet
- Communications 1delDocument80 pagesCommunications 1deljkranjc34No ratings yet
- Com NavDocument30 pagesCom NavRVMN 13No ratings yet
- D M E DME: Istance Easuring QuipmentDocument21 pagesD M E DME: Istance Easuring QuipmentzesleyNo ratings yet
- Aircraft Navigation SystemsDocument13 pagesAircraft Navigation SystemsTheja VinayNo ratings yet
- Airports Authority of India Industrial Training Presentation.Document22 pagesAirports Authority of India Industrial Training Presentation.Anubhav MahajanNo ratings yet
- IAFS-Aerial Navigation-VORDocument27 pagesIAFS-Aerial Navigation-VORioannaknt622No ratings yet
- D M E DME: Istance Easuring QuipmentDocument17 pagesD M E DME: Istance Easuring QuipmentIan Edianel MagdaugNo ratings yet
- navAidsLec Part1Document95 pagesnavAidsLec Part1Hans Marc SimplicioNo ratings yet
- Navigational Aids: Engr. Carlito S. AnatanDocument88 pagesNavigational Aids: Engr. Carlito S. AnatanLuelsonCordovaDeclaradorNo ratings yet
- 03 VorDocument29 pages03 VorYadanaNo ratings yet
- Radio Knobs and Scope Dopes: Behind the Scenes in the Air Navigation SystemFrom EverandRadio Knobs and Scope Dopes: Behind the Scenes in the Air Navigation SystemNo ratings yet
- Reg. No.Document2 pagesReg. No.Kalaimani NNo ratings yet
- BMW Automobile Company: Kenmore RD 41B Park, Wakefield, West Yorkshire WF2 0XR, ENGLAND United KingdomDocument2 pagesBMW Automobile Company: Kenmore RD 41B Park, Wakefield, West Yorkshire WF2 0XR, ENGLAND United KingdomKalaimani NNo ratings yet
- Time Response Analysis Part IDocument5 pagesTime Response Analysis Part ILucas WeaverNo ratings yet
- Amc 20-4aDocument6 pagesAmc 20-4aandrewNo ratings yet
- VopbDocument2 pagesVopbBharat Bhushan100% (1)
- Kboseinn PDF 1572082769Document55 pagesKboseinn PDF 1572082769Mark McKinsnkeyNo ratings yet
- GNSS Processing Report2Document9 pagesGNSS Processing Report2Joshua Paskah NugrahaNo ratings yet
- SVBC PDFDocument8 pagesSVBC PDFjuan ReinalesNo ratings yet
- App2 AirspaceDocument8 pagesApp2 AirspaceKikoFradeNo ratings yet
- Düsseldorf RG Airports: Paderborn/Lippstadt (EDLP / PAD)Document2 pagesDüsseldorf RG Airports: Paderborn/Lippstadt (EDLP / PAD)jazzmanPLNo ratings yet
- MA516 OrmocCityReference-300dpiDocument1 pageMA516 OrmocCityReference-300dpiRochie Mae LuceroNo ratings yet
- GNSS Processing Report Kebun SawitDocument7 pagesGNSS Processing Report Kebun SawitRidwanNo ratings yet
- TUI043 LEBB-LEIB (01-Aug-2021) #1Document37 pagesTUI043 LEBB-LEIB (01-Aug-2021) #1Matthias RoschkNo ratings yet
- Seqm/Uio Quito, Ecuador: Negal Arnok Anbal IlvoxDocument51 pagesSeqm/Uio Quito, Ecuador: Negal Arnok Anbal Ilvoxsantiago laraNo ratings yet
- Instrument Landing System - Wikipedia, The Free EncyclopediaDocument10 pagesInstrument Landing System - Wikipedia, The Free EncyclopediaGavin DunnettNo ratings yet
- GPS SentencesDocument6 pagesGPS SentencesNikhil PendyalaNo ratings yet
- Teseo Liv3flDocument34 pagesTeseo Liv3flАртем ВитальевичNo ratings yet
- LTA KL2300/24 AUG/JFK-MIA: - Not For Real World NavigationDocument52 pagesLTA KL2300/24 AUG/JFK-MIA: - Not For Real World NavigationAlcides Francisnei Oliveira da ConceicaoNo ratings yet
- 17-Flight Management System (FMS)Document56 pages17-Flight Management System (FMS)Niyazi Cem GürsoyNo ratings yet
- Mumbai Aerodrome Related Notams: 08.02.19 FRI 29.10.18 MONDocument3 pagesMumbai Aerodrome Related Notams: 08.02.19 FRI 29.10.18 MONRudro KumarNo ratings yet
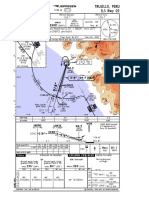
- Trujillo Ils Rwy 02Document1 pageTrujillo Ils Rwy 02Mateo CardenasNo ratings yet
- Load FileDocument85 pagesLoad FileNicolas EncisoNo ratings yet
- File Re DirectorDocument20 pagesFile Re DirectorRangira JudithNo ratings yet
- LIML Star 36 2016-01-07 PDFDocument9 pagesLIML Star 36 2016-01-07 PDFlanzeNo ratings yet
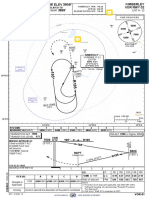
- Cambridge Ils/Dme/Ndb (L) RWY 23 Instrument Approach Chart - IcaoDocument1 pageCambridge Ils/Dme/Ndb (L) RWY 23 Instrument Approach Chart - IcaoAbdelhak MiohsineNo ratings yet
- Fakm - Vor-Dme Rwy 02 - Vor-01 12dec2013Document1 pageFakm - Vor-Dme Rwy 02 - Vor-01 12dec2013DeanNo ratings yet
- Pawa Sancarlos RDDocument1 pagePawa Sancarlos RDJhap Lavega AbrinaNo ratings yet