You might also like
- MAN-00058 Wiring Manual Scorpio (Refresh) VLX Sle LX M2Di PDFDocument149 pagesMAN-00058 Wiring Manual Scorpio (Refresh) VLX Sle LX M2Di PDFHector Muñoz Sepulveda75% (16)
- Hilti Te70 PDFDocument13 pagesHilti Te70 PDFSIVARAMANJAGANATHAN100% (1)
- PSIM MANUAL For StudentsDocument23 pagesPSIM MANUAL For StudentsSomnath Khamaru75% (4)
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 pagesFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna Veni ProfessorNo ratings yet
- ED LAB ManualDocument31 pagesED LAB Manualmanoj kumar100% (1)
- OC442012e FN72-00 (F2000) SPECIFICATIONS 11-00Document7 pagesOC442012e FN72-00 (F2000) SPECIFICATIONS 11-00profistarNo ratings yet
- FSG 2040 2060 2440 2460 2480adiiDocument12 pagesFSG 2040 2060 2440 2460 2480adiiMohamed ShabanNo ratings yet
- Diagrama Ammco 3000-4000-4100 - 3Document16 pagesDiagrama Ammco 3000-4000-4100 - 3jmartinezmo67% (3)
- Ecomat Opertors ManualDocument36 pagesEcomat Opertors Manualryanswj50% (2)
- Caterpilar C175-16 - Project Guide - LEBW0010-00 PDFDocument83 pagesCaterpilar C175-16 - Project Guide - LEBW0010-00 PDFsfdsdfsf50% (2)
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- V and Inverted V Curves of Synchronous MotorDocument7 pagesV and Inverted V Curves of Synchronous Motorkarthikeyan249No ratings yet
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 pagesElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNo ratings yet
- Special Electrical Machines Ee2403 PDFDocument16 pagesSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Hopkinson Test On DC Shunt MotorDocument5 pagesHopkinson Test On DC Shunt MotorVarun VadluriNo ratings yet
- DC Machines Lab ManualDocument56 pagesDC Machines Lab ManualRockstar RichNo ratings yet
- Question Bank Ac MachinesDocument4 pagesQuestion Bank Ac Machinesashwin paulNo ratings yet
- RTU EE Control System Lab 5th SemDocument2 pagesRTU EE Control System Lab 5th SemBhuvneshRathore100% (1)
- Closed Loop Control of Separately Excited DC MotorDocument13 pagesClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINo ratings yet
- Brake Test On 3 Phase Slip Ring Induction MotorDocument5 pagesBrake Test On 3 Phase Slip Ring Induction MotorRajeev Sai0% (1)
- Power Electronics Lab Manual PDFDocument41 pagesPower Electronics Lab Manual PDFSudhakar MarojuNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocument18 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DNo ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDocument4 pages2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- Drives and Control Lab ManualDocument36 pagesDrives and Control Lab ManualKabilanNo ratings yet
- Speed Control of DC MotorDocument4 pagesSpeed Control of DC MotorjitbakNo ratings yet
- VTU Guide Measures Resistance Using Wheatstone BridgeDocument18 pagesVTU Guide Measures Resistance Using Wheatstone Bridgevnyshreyas100% (2)
- Voltage Regulation of 3-Phase Alternator by ZPF and ASA MethodsDocument6 pagesVoltage Regulation of 3-Phase Alternator by ZPF and ASA Methods61EEPrabhat Pal100% (1)
- Power Electronics Lab Manual1Document72 pagesPower Electronics Lab Manual1Harish SvNo ratings yet
- Basic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringDocument158 pagesBasic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringRonan Rojas100% (1)
- Brushless DC MotorDocument3 pagesBrushless DC MotorSourav KumarNo ratings yet
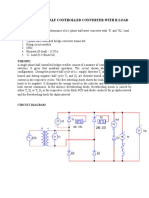
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNo ratings yet
- Injection of EMF in The Rotor CircuitDocument3 pagesInjection of EMF in The Rotor CircuitAbhishekGuptaNo ratings yet
- 17eel37 Eml Lab ManualDocument64 pages17eel37 Eml Lab ManualpriyaNo ratings yet
- Experiment# 10: Measure The Power and Power Factor by Three Ammeter MethodDocument10 pagesExperiment# 10: Measure The Power and Power Factor by Three Ammeter MethodFarwa MunirNo ratings yet
- MA-415 Industrial Drives Lab IndexDocument19 pagesMA-415 Industrial Drives Lab IndexMayankJainNo ratings yet
- Voltage Distribution Across Insulator StringDocument3 pagesVoltage Distribution Across Insulator Stringarjuna4306No ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- High VoltageDocument30 pagesHigh VoltageMohammed Mansoor100% (1)
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDocument3 pagesSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Electrical Drives: An Introduction to Power Electronics and Variable Speed AC and DC Motor DrivesDocument37 pagesElectrical Drives: An Introduction to Power Electronics and Variable Speed AC and DC Motor DrivesDawit Shimeles TesfayeNo ratings yet
- III Eee 05 Ee8501 Psa Unit 1Document37 pagesIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANNo ratings yet
- Control System Lab ManualDocument56 pagesControl System Lab ManualSrinivas Kondal Rao100% (3)
- Synchronous Motor Drive Control MethodsDocument17 pagesSynchronous Motor Drive Control MethodssidharthNo ratings yet
- Power Electronics: Single Phase AC-AC ConvertersDocument18 pagesPower Electronics: Single Phase AC-AC ConvertersMaruti MohiteNo ratings yet
- Electronic Circuits & Logic Design Lab ManualDocument83 pagesElectronic Circuits & Logic Design Lab ManualsunandaalurNo ratings yet
- ANNA UNIVERSITY PRACTICAL EXAM ON DC MACHINES AND TRANSFORMERSDocument4 pagesANNA UNIVERSITY PRACTICAL EXAM ON DC MACHINES AND TRANSFORMERSnandhakumarmeNo ratings yet
- Machies Singly ExcitedDocument15 pagesMachies Singly ExcitedMohamed ElfekyNo ratings yet
- List of Experiments: Sno Name of The Experiment Date SignatureDocument41 pagesList of Experiments: Sno Name of The Experiment Date SignatureRajeshKanchanaNo ratings yet
- Ac Machines Lab ManualDocument102 pagesAc Machines Lab ManualAshwin Gopinath100% (3)
- Lab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterDocument6 pagesLab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterSadil BatafNo ratings yet
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNo ratings yet
- Assignment Induction MotorsDocument3 pagesAssignment Induction MotorsMallikarjunBhiradeNo ratings yet
- DC Motor 2 Marks QuestionsDocument3 pagesDC Motor 2 Marks QuestionsAbhishek100% (1)
- Bee Lab Manual PDFDocument20 pagesBee Lab Manual PDFkshitij kumarNo ratings yet
- MP Electrical Drives Lab ManualDocument37 pagesMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuNo ratings yet
- Asynchronous Machines Tutorial Sheets (EL-208Document10 pagesAsynchronous Machines Tutorial Sheets (EL-208Kushagra BhatiaNo ratings yet
- Stepper Motor: CO2: LO: Understand Construction and Operation Write The Control SequenceDocument25 pagesStepper Motor: CO2: LO: Understand Construction and Operation Write The Control SequenceAzeem .kNo ratings yet
- PX7203-Special Electrical Machines PDFDocument11 pagesPX7203-Special Electrical Machines PDFvaishnavisriNo ratings yet
- Lab Manual Electrical Workshop4 IDocument47 pagesLab Manual Electrical Workshop4 Ishoaib ehsanNo ratings yet
- PS Lab ManualDocument25 pagesPS Lab ManualPhani PhaniNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- EM2 - Lab - 10 - Synchronous Motor Part I - STD PDFDocument7 pagesEM2 - Lab - 10 - Synchronous Motor Part I - STD PDFneonNo ratings yet
- Analysis of Self Excited Induction Generator Delta Connected Resistive LoadDocument24 pagesAnalysis of Self Excited Induction Generator Delta Connected Resistive LoadHemant KumarNo ratings yet
- Lab Report: Engineering Analysis and Design (EEN 206)Document6 pagesLab Report: Engineering Analysis and Design (EEN 206)saksham mahajanNo ratings yet
- Loader/Backhoe 590 Super L: Engine Hydraulic System SteeringDocument4 pagesLoader/Backhoe 590 Super L: Engine Hydraulic System SteeringAnderson ertsNo ratings yet
- Parking Brake System: SectionDocument10 pagesParking Brake System: SectionPiyapong SaerimNo ratings yet
- Yanmar L70N5E PartlistDocument50 pagesYanmar L70N5E PartlistYew LimNo ratings yet
- Generator Operations GuideDocument8 pagesGenerator Operations GuideIan CutinNo ratings yet
- Freelander Workshop Manual (2001+)Document363 pagesFreelander Workshop Manual (2001+)porcporc100% (3)
- 14M R9J Schematic PDFDocument8 pages14M R9J Schematic PDFJhun HunkNo ratings yet
- 6060 Tank Pumps Drive ControllerDocument25 pages6060 Tank Pumps Drive ControllerEdison Pfoccori BarrionuevoNo ratings yet
- Pipe Friction Loss Charts: Loss of Head in Feet Due To Friction Per 100 Feet of PipeDocument1 pagePipe Friction Loss Charts: Loss of Head in Feet Due To Friction Per 100 Feet of Pipeagus salamNo ratings yet
- 14264A Construction Mechanic Basic Chapters 3 4 PDFDocument73 pages14264A Construction Mechanic Basic Chapters 3 4 PDFNithin100% (1)
- Reciprocating Engine Overhaul ProceduresDocument4 pagesReciprocating Engine Overhaul ProceduresCapNo ratings yet
- Shutdown SIS: Excavator 320C Excavator Amc 320C & 320C L Excavators AMC00001-UP (MACHINE) POWERED BY 3066 EngineDocument4 pagesShutdown SIS: Excavator 320C Excavator Amc 320C & 320C L Excavators AMC00001-UP (MACHINE) POWERED BY 3066 EngineR I SantosoNo ratings yet
- Catalogo Rodamiento Axial Crapodina NSKDocument18 pagesCatalogo Rodamiento Axial Crapodina NSKMiguel Angel AguirreNo ratings yet
- L580 PDFDocument28 pagesL580 PDFCao Hao NguyenNo ratings yet
- Hydraulic Pump&Motor Spare PartsDocument26 pagesHydraulic Pump&Motor Spare PartsKo Ngelay100% (1)
- SKF Locknut Shaft Details InchDocument6 pagesSKF Locknut Shaft Details InchKOMATSU SHOVELNo ratings yet
- RAM StudyDocument12 pagesRAM StudyputelNo ratings yet
- Meritor Service Manual DUCO - MM1127Document83 pagesMeritor Service Manual DUCO - MM1127LUKASNo ratings yet
- Chapter 6: Asynchronous (Induction) Motor (Part 1)Document4 pagesChapter 6: Asynchronous (Induction) Motor (Part 1)Slim ShaddysNo ratings yet
- Enclosed Are The August 2021 Incal Dvd-RomsDocument4 pagesEnclosed Are The August 2021 Incal Dvd-RomsLuck TowthousandandthirteenNo ratings yet
- Internal Combustion Engine Testing RequirementsDocument2 pagesInternal Combustion Engine Testing RequirementsokaNo ratings yet
- Catalogo de Winch Fa5a PDFDocument60 pagesCatalogo de Winch Fa5a PDFingcalderonNo ratings yet
- 53S6 (1L53S450E1) T115LE Vega DrumDocument53 pages53S6 (1L53S450E1) T115LE Vega DrumGAYLE GONo ratings yet
- Disassembled ViewsDocument28 pagesDisassembled ViewsLordSiTHErNo ratings yet