You might also like
- Radar Systems, Peak Detection and TrackingFrom EverandRadar Systems, Peak Detection and TrackingRating: 5 out of 5 stars5/5 (1)
- EE602 Radar Notes-1Document41 pagesEE602 Radar Notes-1Yash Nimje100% (1)
- Radar 2009 A - 11 Waveforms and Pulse CompressionDocument58 pagesRadar 2009 A - 11 Waveforms and Pulse Compressionkamal__singhNo ratings yet
- Communication Services via Satellite: A Handbook for Design, Installation and Service EngineersFrom EverandCommunication Services via Satellite: A Handbook for Design, Installation and Service EngineersNo ratings yet
- Radar Cross SectionDocument8 pagesRadar Cross SectionHoai Bao NguyenNo ratings yet
- Techniques For Radar and EW Signal SimulationDocument49 pagesTechniques For Radar and EW Signal SimulationPrashu LoverofmusicNo ratings yet
- Radar Handbook PDFDocument1,352 pagesRadar Handbook PDFAwak100% (7)
- Lpi RDRDocument6 pagesLpi RDRLeon LellaNo ratings yet
- Radar Transmitter-4Document61 pagesRadar Transmitter-4Abdullah OmerNo ratings yet
- Principles of RadarDocument29 pagesPrinciples of RadarcostinosNo ratings yet
- Radar 2009 A - 7 Radar Cross Section 1Document49 pagesRadar 2009 A - 7 Radar Cross Section 1Hafidz BaswedanNo ratings yet
- EEE381B Aerospace Systems & Avionics: RadarDocument49 pagesEEE381B Aerospace Systems & Avionics: RadardegabbzsNo ratings yet
- Radar System Components and System DesignDocument13 pagesRadar System Components and System DesignRaushan SinghNo ratings yet
- Principles of Modern Radar - Advanced Techniques (gnv64) PDFDocument875 pagesPrinciples of Modern Radar - Advanced Techniques (gnv64) PDFryto201092% (13)
- Exam 2016 RadarDocument13 pagesExam 2016 Radaradib50% (2)
- Detection and Jamming Low Probability of Intercept RadarDocument123 pagesDetection and Jamming Low Probability of Intercept Radarknightatarms50% (2)
- Adaptive Active Phased Array Radar PresentationDocument17 pagesAdaptive Active Phased Array Radar PresentationHarika Kilari50% (2)
- Antenna and Radar EngineeringDocument141 pagesAntenna and Radar EngineeringArun Singh SumbriaNo ratings yet
- Passive RadarDocument13 pagesPassive RadarmotorguruNo ratings yet
- Hensoldt TRS-4D® RotatorDocument2 pagesHensoldt TRS-4D® RotatorShiva Singh100% (1)
- Topic 4 Radar FundamentalsDocument131 pagesTopic 4 Radar FundamentalsValarmathi Selvarajoo100% (1)
- Radar Systems NotesDocument457 pagesRadar Systems NotesMridula Mittal Bansal100% (2)
- VHF Omnidirectional Radio Range VORDocument9 pagesVHF Omnidirectional Radio Range VORDenise GuerraNo ratings yet
- Radar Signal Interception Moves Into The Digital Age ELINT App-Bro en 3607-5019-92 v0100 72dpi PDFDocument8 pagesRadar Signal Interception Moves Into The Digital Age ELINT App-Bro en 3607-5019-92 v0100 72dpi PDFshahab idreesNo ratings yet
- Ship Detection With DVB-T Software Defined Passive RadarDocument3 pagesShip Detection With DVB-T Software Defined Passive RadarAnonymous Pjbdf4wWNo ratings yet
- Satellite SubsystemsDocument30 pagesSatellite SubsystemsRaghav GargNo ratings yet
- Radar Target Detection: Handbook of Theory and PracticeFrom EverandRadar Target Detection: Handbook of Theory and PracticeRating: 5 out of 5 stars5/5 (1)
- Introduction To Radar Systems - 2014Document38 pagesIntroduction To Radar Systems - 2014lfsa90No ratings yet
- Passive Radar in Base of PBRDocument3 pagesPassive Radar in Base of PBRJaleni OcampoNo ratings yet
- Eccm in RadarsDocument89 pagesEccm in Radarsjumaah5234100% (4)
- Surface ClutterDocument17 pagesSurface ClutterVinod MogadalaNo ratings yet
- RADAR Signal Data Acquisition, Conditioning & Processing SystemDocument27 pagesRADAR Signal Data Acquisition, Conditioning & Processing SystemNataraju GandlaNo ratings yet
- Nes Smith 1976Document11 pagesNes Smith 1976Maxamed CabdiraximNo ratings yet
- US Navy Training Course - Electronics Technician - Volume 04 - Radar SystemsDocument86 pagesUS Navy Training Course - Electronics Technician - Volume 04 - Radar SystemscliftoncageNo ratings yet
- Understanding Radar SystemsDocument391 pagesUnderstanding Radar SystemsВладимир Аверочкин100% (1)
- RADARDocument22 pagesRADARRadyl Ced Adorforme100% (3)
- Microwave Systems Part2Document107 pagesMicrowave Systems Part2KenNo ratings yet
- Radar BasicsDocument10 pagesRadar BasicsSteve AbonyiNo ratings yet
- Multi-Channel Transmit/receive Modules For X-Band AesaDocument3 pagesMulti-Channel Transmit/receive Modules For X-Band AesaDhimas AfihandarinNo ratings yet
- Radar Vs Stealth - Passive Radar & FutureDocument8 pagesRadar Vs Stealth - Passive Radar & Futurelynx437No ratings yet
- Use of Communication in Radar SystemDocument5 pagesUse of Communication in Radar SystemKathryn Patton100% (1)
- Guided MissileDocument13 pagesGuided MissileAnurag RanaNo ratings yet
- Radar Signals: An Introduction to Theory and ApplicationFrom EverandRadar Signals: An Introduction to Theory and ApplicationRating: 3 out of 5 stars3/5 (2)
- (Military and Aerospace Electronics Europe - Feb-Mar 2006) (2006)Document36 pages(Military and Aerospace Electronics Europe - Feb-Mar 2006) (2006)Balaji HimakarNo ratings yet
- Modern Missile AnalysisDocument37 pagesModern Missile AnalysisAlex Yang100% (1)
- 4.11 Radar Cross-Section (RCS)Document5 pages4.11 Radar Cross-Section (RCS)hariramrmNo ratings yet
- Radio Remote-Control and Telemetry and Their Application to MissilesFrom EverandRadio Remote-Control and Telemetry and Their Application to MissilesRating: 4 out of 5 stars4/5 (1)
- MTI RadarDocument19 pagesMTI RadarGayathriNo ratings yet
- Radar Equations For Modern Radar PDFDocument448 pagesRadar Equations For Modern Radar PDFAndréNo ratings yet
- Analog, Digital and Multimedia Telecommunications: Basic and Classic PrinciplesFrom EverandAnalog, Digital and Multimedia Telecommunications: Basic and Classic PrinciplesRating: 4 out of 5 stars4/5 (1)
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Introduction to Electromagnetic CompatibilityFrom EverandIntroduction to Electromagnetic CompatibilityRating: 3 out of 5 stars3/5 (2)
- Computer Techniques for Electromagnetics: International Series of Monographs in Electrical EngineeringFrom EverandComputer Techniques for Electromagnetics: International Series of Monographs in Electrical EngineeringR. MittraRating: 3 out of 5 stars3/5 (1)
- 11 AppendixDocument48 pages11 AppendixVIKALP KULSHRESTHANo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- ME Admission Application Proforma 2012 13Document5 pagesME Admission Application Proforma 2012 13VIKALP KULSHRESTHANo ratings yet
- PLLDocument9 pagesPLLVIKALP KULSHRESTHANo ratings yet
- Phase Locked Loop DesignDocument13 pagesPhase Locked Loop DesignVIKALP KULSHRESTHANo ratings yet
- Satellite CommunicationsDocument743 pagesSatellite CommunicationsVIKALP KULSHRESTHA100% (1)
- RaggingDocument10 pagesRaggingVIKALP KULSHRESTHANo ratings yet
- Data Structure File MPCTDocument37 pagesData Structure File MPCTVIKALP KULSHRESTHANo ratings yet
- WaveguidesDocument41 pagesWaveguidesVIKALP KULSHRESTHA80% (5)
- MatlabDocument176 pagesMatlabhonnamb100% (1)
- Asynchronous Transfer Mode (ATM)Document27 pagesAsynchronous Transfer Mode (ATM)VIKALP KULSHRESTHANo ratings yet
- Comm AnalogDocument29 pagesComm AnalogShaveen BeedasyNo ratings yet
- Mejor ProjectDocument42 pagesMejor ProjectVIKALP KULSHRESTHANo ratings yet
- Types of TopologyDocument1 pageTypes of TopologyVIKALP KULSHRESTHA100% (1)
- Networking Methods: Local Area Network (LAN)Document4 pagesNetworking Methods: Local Area Network (LAN)VIKALP KULSHRESTHANo ratings yet
- How To Build A Computer NetworkDocument3 pagesHow To Build A Computer NetworkVIKALP KULSHRESTHANo ratings yet
- Lanwan Network DevicesDocument3 pagesLanwan Network DevicesVIKALP KULSHRESTHANo ratings yet
- Introduction To PC ComponentsDocument4 pagesIntroduction To PC ComponentsVIKALP KULSHRESTHANo ratings yet
- Network CablesDocument2 pagesNetwork CablesVIKALP KULSHRESTHANo ratings yet
- Introduction To TcpipDocument3 pagesIntroduction To TcpipVIKALP KULSHRESTHA100% (1)
- Ip AddressingDocument3 pagesIp AddressingVIKALP KULSHRESTHANo ratings yet
- Introduction To Isdn LineDocument3 pagesIntroduction To Isdn LineVIKALP KULSHRESTHANo ratings yet
- Hardware of ComputerDocument25 pagesHardware of ComputerVIKALP KULSHRESTHANo ratings yet
- Hard Disk BasedDocument3 pagesHard Disk BasedVIKALP KULSHRESTHANo ratings yet
- Computer Network ArchitectureDocument2 pagesComputer Network ArchitectureVIKALP KULSHRESTHANo ratings yet
- Components of A NetworkDocument2 pagesComponents of A NetworkVIKALP KULSHRESTHANo ratings yet
- TV Studio of PresentationDocument26 pagesTV Studio of PresentationVIKALP KULSHRESTHANo ratings yet
- Rgtu Front Page For ProjectDocument1 pageRgtu Front Page For ProjectVIKALP KULSHRESTHANo ratings yet
- Fina Training ReportDocument36 pagesFina Training ReportVIKALP KULSHRESTHANo ratings yet
- TV Vocational Training ProjectDocument26 pagesTV Vocational Training ProjectVIKALP KULSHRESTHANo ratings yet
- Understanding ComputerDocument27 pagesUnderstanding ComputermarkNo ratings yet
- Dsa 234647 PDFDocument356 pagesDsa 234647 PDFDavid Isaias Jaimes ReyesNo ratings yet
- Quiz 3Document3 pagesQuiz 3Nereo ReoliquioNo ratings yet
- User Manual DuraMON G-Line Rev FDocument37 pagesUser Manual DuraMON G-Line Rev Fwijang08No ratings yet
- Pondicherry UniversityDocument17 pagesPondicherry Universityjohn billy balidioNo ratings yet
- Ursalink UR51 Industrial Cellular Router User GuideDocument129 pagesUrsalink UR51 Industrial Cellular Router User GuideUrsalink MarketingNo ratings yet
- LoRa Register Calculator For RadioheadDocument9 pagesLoRa Register Calculator For RadioheadMarchio KevinNo ratings yet
- A Microcontroller Based Water Level Indicator Using Radio Frequency RF Technology and Ultrasonic Sensor1Document6 pagesA Microcontroller Based Water Level Indicator Using Radio Frequency RF Technology and Ultrasonic Sensor1amey salunke100% (1)
- The Primer Trainer Self InstructionDocument82 pagesThe Primer Trainer Self InstructionElvis LopezNo ratings yet
- Docu Ceragon Family 7 06Document257 pagesDocu Ceragon Family 7 06stefan.mirceaNo ratings yet
- LG 21FG3RG-T9 CH CP-079A PDFDocument25 pagesLG 21FG3RG-T9 CH CP-079A PDFboroda2410No ratings yet
- Avr MX321Document3 pagesAvr MX321Ahmad ArpaniNo ratings yet
- SD Wan Comparison Guide UpdatedDocument1 pageSD Wan Comparison Guide UpdatedAlberto Ciaffardoni80% (5)
- Panasonic S10 Plasma TVDocument72 pagesPanasonic S10 Plasma TVplanet_ocho7472No ratings yet
- Isolated Amplifier MIU 10: Instruction ManualDocument10 pagesIsolated Amplifier MIU 10: Instruction ManualRobbie ThompsonNo ratings yet
- PMC-53A Catalogue (20200807S)Document4 pagesPMC-53A Catalogue (20200807S)Ronald H SantosNo ratings yet
- Vanet PresentationDocument8 pagesVanet Presentationchaitanya gavitNo ratings yet
- Oc Mid2 (Jntuzone - Com)Document22 pagesOc Mid2 (Jntuzone - Com)swarnasugandhNo ratings yet
- ERSA SMT 60 AC SMD Soldering & Desoldering StationDocument1 pageERSA SMT 60 AC SMD Soldering & Desoldering StationbehzadNo ratings yet
- FS3KMDocument5 pagesFS3KMpepe sanchezNo ratings yet
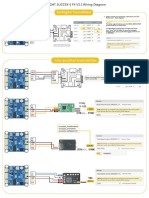
- SUCCEX-E F4 V2.1 Wiring Diagram 201006Document3 pagesSUCCEX-E F4 V2.1 Wiring Diagram 201006jhon alexander barbosa avendaño100% (3)
- AMD K7 Processor Based AGP: Main BoardDocument69 pagesAMD K7 Processor Based AGP: Main BoardNacho ElGrandeNo ratings yet
- Any Any Inverter M Model: Compatible With Al L Models of Inverter ProductsDocument2 pagesAny Any Inverter M Model: Compatible With Al L Models of Inverter Productsmanlu1001565100% (1)
- User Guide. NCR X-Series Displays (5968 - 5985) B Issue BDocument62 pagesUser Guide. NCR X-Series Displays (5968 - 5985) B Issue Bdukindonutz123No ratings yet
- Eet202/3 Digital Electronics Ii Tutorial 4Document13 pagesEet202/3 Digital Electronics Ii Tutorial 4HaroonRashidNo ratings yet
- Compliance (NBA) Report - 11-220-201525 - 1 - 2019 - 11 - 47 - 15 PDFDocument52 pagesCompliance (NBA) Report - 11-220-201525 - 1 - 2019 - 11 - 47 - 15 PDFAnil Kumar B67% (3)
- Tas 5142Document34 pagesTas 5142Dragan SurlanNo ratings yet
- JVC SR-V10U Service Manual 82899Document4 pagesJVC SR-V10U Service Manual 82899MokaNo ratings yet
- Bee - Ii-I CseDocument156 pagesBee - Ii-I CseshivakumarkondakavalNo ratings yet
- M02-Basic Integrated Security SystemDocument132 pagesM02-Basic Integrated Security SystemTariku TesfayeNo ratings yet