You might also like
- Multisim Unsolved Questions BITS PilaniDocument2 pagesMultisim Unsolved Questions BITS Pilanimanish_genus100% (1)
- CWorksPlusA Manual PDFDocument342 pagesCWorksPlusA Manual PDFCristopher Jimenez JaramilloNo ratings yet
- Design Via Root Locus and Frequency ResponseDocument15 pagesDesign Via Root Locus and Frequency ResponseBran WzNo ratings yet
- J. R. Lucas - Three Phase TheoryDocument19 pagesJ. R. Lucas - Three Phase TheoryQM_2010No ratings yet
- BJT Biasing (Complete)Document64 pagesBJT Biasing (Complete)Hung PhamNo ratings yet
- Trapezoidal RuleDocument10 pagesTrapezoidal RuleRicardo Wan Aguero0% (1)
- 3 Phase Voltage FolumarsDocument12 pages3 Phase Voltage FolumarsrocaoNo ratings yet
- Transient Analysis of Three-Phase Power SystemsDocument35 pagesTransient Analysis of Three-Phase Power SystemsBerly NoviantoniNo ratings yet
- S Domain AnalysisDocument20 pagesS Domain AnalysisKasunShreeBandaraNo ratings yet
- Root Locus TechniqueDocument43 pagesRoot Locus TechniqueAzeem SarwarNo ratings yet
- EE423 Fault Analysis NotesDocument26 pagesEE423 Fault Analysis NotesadnanNo ratings yet
- Sketching A Root Locus PlotDocument9 pagesSketching A Root Locus PlotsajjadnedianNo ratings yet
- Fiber Optics NotesDocument12 pagesFiber Optics NotesMonika HansdaNo ratings yet
- Printed Notes On Operational Amplifiers and Differential Amplifier and Numericals Based On The SameDocument98 pagesPrinted Notes On Operational Amplifiers and Differential Amplifier and Numericals Based On The SameDiptiNo ratings yet
- Control System Synthesis by Root Locus MethodDocument6 pagesControl System Synthesis by Root Locus MethodcastrojpNo ratings yet
- UNIT 1 ElectrostaticsDocument46 pagesUNIT 1 ElectrostaticsHimanshu BhandariNo ratings yet
- Multistage Transistor AmplifiersDocument8 pagesMultistage Transistor Amplifiersbree789No ratings yet
- Engineering Prob & Stat Lecture Notes 6Document12 pagesEngineering Prob & Stat Lecture Notes 6EICQ/00154/2020 SAMUEL MWANGI RUKWARONo ratings yet
- Differential AmplifierDocument15 pagesDifferential AmplifierrppvchNo ratings yet
- Circuit Analysis With Laplace Transform (Week 6) PDFDocument7 pagesCircuit Analysis With Laplace Transform (Week 6) PDFmaaz ansariNo ratings yet
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
- Symmetrical ComponentsDocument54 pagesSymmetrical ComponentsShuvo ShahedNo ratings yet
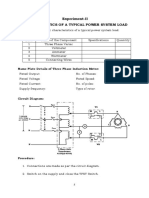
- 2.characteristics of A Typical Power System LoadDocument3 pages2.characteristics of A Typical Power System Loadarjuna4306No ratings yet
- Signals and SystemsDocument17 pagesSignals and SystemsSanthosh Vegeta Goku GNo ratings yet
- Alternating Currents Part BDocument30 pagesAlternating Currents Part BShejuti KarmakarNo ratings yet
- 08-Com101 AMDocument11 pages08-Com101 AMHồng HoanNo ratings yet
- Lecture 4 Maximum PrincipleDocument21 pagesLecture 4 Maximum Principlemohamed-gamaaNo ratings yet
- Symmetrical Components 2Document15 pagesSymmetrical Components 2CaribNo ratings yet
- Symmetrical ComponentsDocument18 pagesSymmetrical ComponentsBante TadeleNo ratings yet
- Analysis Using Laplace Function 3Document33 pagesAnalysis Using Laplace Function 3hafidahnsNo ratings yet
- Fixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaDocument9 pagesFixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaNitish_Katal_9874No ratings yet
- Energy Levels of Semiconductor, Conductors and InsulatorsDocument53 pagesEnergy Levels of Semiconductor, Conductors and InsulatorsTawki BakiNo ratings yet
- Assignment 2-1Document2 pagesAssignment 2-1areejNo ratings yet
- FM Frequency Modulation EngineersTutorDocument11 pagesFM Frequency Modulation EngineersTutorImelda SuloNo ratings yet
- An Introduction To Symmetrical Components, System Modeling and Fault CalculationDocument75 pagesAn Introduction To Symmetrical Components, System Modeling and Fault CalculationCai_waiBeioanNo ratings yet
- Bode Plots and S-Domain AnalysisDocument23 pagesBode Plots and S-Domain AnalysispowerdeadlifterNo ratings yet
- Ch04 First Order Circuits PDFDocument96 pagesCh04 First Order Circuits PDFMichelle BatadNo ratings yet
- New Microsoft Word DocumentDocument13 pagesNew Microsoft Word DocumentAhmad RaheelNo ratings yet
- AC FundamentalsDocument30 pagesAC FundamentalsSouhardya RoyNo ratings yet
- Chapter 1 Coulomb's Law PDFDocument43 pagesChapter 1 Coulomb's Law PDFChitra Ashutosh Tembe50% (2)
- Differences Between Mup and MucDocument2 pagesDifferences Between Mup and Mucrihatrivedi_069No ratings yet
- Tutorial 1 Drawing A Transistor Sensing CircuitDocument7 pagesTutorial 1 Drawing A Transistor Sensing CircuitFernando ValenteNo ratings yet
- Application of Laplace TransformDocument35 pagesApplication of Laplace TransformSingappuli100% (1)
- Lab 7 FM POCDocument7 pagesLab 7 FM POCSPARK LIGHTSNo ratings yet
- Op-Amp Basic Stages: Adama UniversityDocument18 pagesOp-Amp Basic Stages: Adama Universitygebretsadkan abrhaNo ratings yet
- Ground Fault CurrentDocument5 pagesGround Fault Currentjsrplc7952No ratings yet
- SEEA1301Document137 pagesSEEA1301Chintapalli Ramesh KumarNo ratings yet
- AN108A Inductive Load Arc SuppressionDocument3 pagesAN108A Inductive Load Arc SuppressionihsanjuNo ratings yet
- Experiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit DiagramDocument4 pagesExperiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit Diagrampandiyarajan142611No ratings yet
- Coordinate SystemDocument7 pagesCoordinate SystemSarwar Hosen SimonNo ratings yet
- 03 Load Flow SolutionDocument61 pages03 Load Flow Solutionবিবেক রত্নNo ratings yet
- Differentiator and IntegratorDocument5 pagesDifferentiator and Integratorvinit.vermaNo ratings yet
- EC - Unit 4 - Negative FeedbackDocument12 pagesEC - Unit 4 - Negative Feedbacknanobala15No ratings yet
- Bode Plots: Multiple Choice Questions For Online ExamDocument23 pagesBode Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtNo ratings yet
- Design of PID ControllerDocument13 pagesDesign of PID ControllershrikrisNo ratings yet
- Nyquist Stability CriterionDocument7 pagesNyquist Stability CriterionArul RajNo ratings yet
- Computer and Robot Vision, Vol 1Document682 pagesComputer and Robot Vision, Vol 1Dibyendu Mukherjee100% (1)
- Nyquist Plot ExptDocument7 pagesNyquist Plot ExptMANOJ KUMAR DASNo ratings yet
- Application of Fourier's Allied Integrals To The Kramers-Kronig Transformation of Reflectance DataDocument8 pagesApplication of Fourier's Allied Integrals To The Kramers-Kronig Transformation of Reflectance Datapomon666No ratings yet
- An Adaptive, Fixed-Point Version of Grover's Algorithm: Robert R. Tucci P.O. Box 226 Bedford, MA 01730 October 23, 2018Document20 pagesAn Adaptive, Fixed-Point Version of Grover's Algorithm: Robert R. Tucci P.O. Box 226 Bedford, MA 01730 October 23, 2018makumba1972No ratings yet
- Lighting Design - SE SponsorshipDocument71 pagesLighting Design - SE SponsorshipmoosuhaibNo ratings yet
- Building Construction CostingDocument3 pagesBuilding Construction CostingmoosuhaibNo ratings yet
- General Use Power - SE SponsorshipDocument49 pagesGeneral Use Power - SE SponsorshipmoosuhaibNo ratings yet
- MEP Coordination - SE SponsorshipDocument42 pagesMEP Coordination - SE SponsorshipmoosuhaibNo ratings yet
- LV SwitchGears - SE SponsorshipDocument70 pagesLV SwitchGears - SE SponsorshipmoosuhaibNo ratings yet
- Electrical Spaces Design PresentationDocument97 pagesElectrical Spaces Design PresentationmoosuhaibNo ratings yet
- Lec.02 - Bulky EquipmentDocument37 pagesLec.02 - Bulky EquipmentmoosuhaibNo ratings yet
- Lec.01 - Building Design Concept - SE Sponsor 2021Document20 pagesLec.01 - Building Design Concept - SE Sponsor 2021moosuhaibNo ratings yet
- Kmpp-06-Ele-CA-004 Calculation of Earthing & Lightning Protection Systems - Terminal Station Rev0Document13 pagesKmpp-06-Ele-CA-004 Calculation of Earthing & Lightning Protection Systems - Terminal Station Rev0moosuhaibNo ratings yet
- Healthcare Functional Design BriefDocument86 pagesHealthcare Functional Design BriefmoosuhaibNo ratings yet
- Industrial Buildings Solutions GuideDocument39 pagesIndustrial Buildings Solutions GuidemoosuhaibNo ratings yet
- Applsci 11 11564 v2Document22 pagesApplsci 11 11564 v2moosuhaibNo ratings yet
- Surge ArresterDocument17 pagesSurge ArrestermoosuhaibNo ratings yet
- 1.eaton ACB MWI SeriesDocument19 pages1.eaton ACB MWI SeriesmoosuhaibNo ratings yet
- Calculate Size of Diesel Generator 22-8-12Document1 pageCalculate Size of Diesel Generator 22-8-12moosuhaibNo ratings yet
- UniPack-G Catalog Rev C 1VPD110001A0355 PDFDocument60 pagesUniPack-G Catalog Rev C 1VPD110001A0355 PDFmoosuhaibNo ratings yet
- Protection ControlDocument101 pagesProtection ControlmoosuhaibNo ratings yet
- Protection RelaysDocument87 pagesProtection Relaysmoosuhaib100% (1)
- Tachick Isolation Overview PDFDocument52 pagesTachick Isolation Overview PDFmoosuhaibNo ratings yet
- 02 Lightning Rods and AccessoriesDocument78 pages02 Lightning Rods and Accessoriesmoosuhaib100% (1)
- Multi 0 PageDocument266 pagesMulti 0 PageNatali GolubNo ratings yet
- Chapter 17Document26 pagesChapter 17ProfessorTextechNo ratings yet
- Edibls Oil and Fats TechnologyDocument20 pagesEdibls Oil and Fats TechnologyKhurram Shahzad100% (3)
- ETK101E Introduction 12Document20 pagesETK101E Introduction 12bilalNo ratings yet
- Cheese in IndonesiaDocument10 pagesCheese in IndonesialinggaraninditaNo ratings yet
- MFSO COURSE OUTLINE (3 Days)Document7 pagesMFSO COURSE OUTLINE (3 Days)malaysiamadani01No ratings yet
- Advanced Tax Laws CS Professional, YES AcademyDocument33 pagesAdvanced Tax Laws CS Professional, YES AcademyKaran AroraNo ratings yet
- Mobile Air Conditioning: White PaperDocument70 pagesMobile Air Conditioning: White PaperGraciaVelitarioNo ratings yet
- Planning and Organizing Hospital Units and Ancillary ServicesDocument33 pagesPlanning and Organizing Hospital Units and Ancillary ServicesManisha Thakur100% (1)
- LibropublicadoNova2020 PDFDocument287 pagesLibropublicadoNova2020 PDFDanielNo ratings yet
- Mục 13. Máy xọc AJAX-AJSL300 PDFDocument2 pagesMục 13. Máy xọc AJAX-AJSL300 PDFVăn ST QuangNo ratings yet
- 301 Process Financial Transactions and Extract Interim ReportsDocument49 pages301 Process Financial Transactions and Extract Interim Reportsabelu habite neri100% (1)
- DateSheet 6th Sem B.Tech Maharshi Dayanand University Rohtak MDU May 2010 TechnoKriti Manav Rachna College of Engineering FaridabadDocument3 pagesDateSheet 6th Sem B.Tech Maharshi Dayanand University Rohtak MDU May 2010 TechnoKriti Manav Rachna College of Engineering Faridabadtitanicheart17No ratings yet
- BOOKLET N3 WEEK 4 P 23 25 PDFDocument3 pagesBOOKLET N3 WEEK 4 P 23 25 PDFElyBlueNo ratings yet
- CMG ImexDocument6 pagesCMG ImexvajrahastaNo ratings yet
- Green Well Biotech (Bio Products)Document14 pagesGreen Well Biotech (Bio Products)vihatvipulNo ratings yet
- Bangladesh General Insurance - 2019 PDFDocument115 pagesBangladesh General Insurance - 2019 PDFMd Nurul Hoque FirozNo ratings yet
- Report On Summer Industrial Training atDocument43 pagesReport On Summer Industrial Training atTarun UpadhyayNo ratings yet
- Bellis V Bellis G.R. No. L 23678 June 6 1967Document1 pageBellis V Bellis G.R. No. L 23678 June 6 1967Mavic MoralesNo ratings yet
- S1D13305F00A200 - 001 Technical ManualDocument26 pagesS1D13305F00A200 - 001 Technical Manualatorresh090675No ratings yet
- Value Proposition Canvas-CorporateDocument14 pagesValue Proposition Canvas-CorporateHbNo ratings yet
- Paving Expert - AJ McCormack and Son - Drainage - SoakawaysDocument7 pagesPaving Expert - AJ McCormack and Son - Drainage - SoakawaysGEOMAHESHNo ratings yet
- Finalized - HG - G2 - Q4 - Module 14Document13 pagesFinalized - HG - G2 - Q4 - Module 14Joy Riego BatacNo ratings yet
- CVVsDocument1 pageCVVsDemon'Child Jayy100% (1)
- EIGRP Lab PDFDocument4 pagesEIGRP Lab PDFsoloNo ratings yet
- Tutorial Certification HCNPDocument8 pagesTutorial Certification HCNPBian HardiyantoNo ratings yet
- Stakeholder Management of Jalswarajya ProjectDocument4 pagesStakeholder Management of Jalswarajya ProjectVinay K KudlurNo ratings yet
- DME 230 400 Profinet InterfaceDocument44 pagesDME 230 400 Profinet InterfaceOwais JafriNo ratings yet
- Cascadia Maintenance Manual Models: CA113DC CA113SLP CA125DC CA125SLPDocument121 pagesCascadia Maintenance Manual Models: CA113DC CA113SLP CA125DC CA125SLPCao LanNo ratings yet