You might also like
- ECE 476 Power System AnalysisDocument30 pagesECE 476 Power System AnalysisWajahat Ullah Khan TareenNo ratings yet
- EE453 LECT 2a - Power FlowDocument34 pagesEE453 LECT 2a - Power FlowOburu David KatandiNo ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- ECE476 2016 Lect12Document30 pagesECE476 2016 Lect12Wajahat Ullah Khan TareenNo ratings yet
- ECE 476 Power System Analysis: Lecture 11: Ybus, Power FlowDocument32 pagesECE 476 Power System Analysis: Lecture 11: Ybus, Power FlowFady MichealNo ratings yet
- ECE 333 Lecture 14: Power Flow Analysis with Newton-Raphson MethodDocument43 pagesECE 333 Lecture 14: Power Flow Analysis with Newton-Raphson MethodrdelgranadoNo ratings yet
- PSSe Workshop Day 2Document91 pagesPSSe Workshop Day 2Steve Musarurwa100% (2)
- Load Flow AnalysisDocument35 pagesLoad Flow AnalysisSachinNo ratings yet
- ECE4762011 Lect12Document32 pagesECE4762011 Lect12Engr.Arslan AbbasNo ratings yet
- Gauss Seidel MethodNewDocument45 pagesGauss Seidel MethodNewMehmood MalikNo ratings yet
- Power FlowDocument33 pagesPower FlowbaboyasoNo ratings yet
- 2-Power Flow AnalysisDocument56 pages2-Power Flow AnalysisFady MichealNo ratings yet
- CircuitanlyDocument32 pagesCircuitanlysetsindia3735No ratings yet
- Power System Analysis: Transformers, Load & Generator Models, YbusDocument34 pagesPower System Analysis: Transformers, Load & Generator Models, YbusOladeji Ifedayo RNo ratings yet
- Gauss-Seidel Method Power Flow SolutionDocument32 pagesGauss-Seidel Method Power Flow SolutionGerhan Pradana0% (1)
- Lecture 11Document39 pagesLecture 11HossamKamalNo ratings yet
- The Power Flow Equations 1.0 The Admittance Matrix: Current Injections at A Bus Are Analogous To Power Injections. TheDocument29 pagesThe Power Flow Equations 1.0 The Admittance Matrix: Current Injections at A Bus Are Analogous To Power Injections. TheJose A. Regalado RojasNo ratings yet
- Lecture 1a. Bus Admittance and Bus Impedance MatricesDocument16 pagesLecture 1a. Bus Admittance and Bus Impedance Matriceswakolesha TadeoNo ratings yet
- 1-Power Systems ModelingDocument23 pages1-Power Systems ModelingFady MichealNo ratings yet
- Z-Base Case. One Circuit Per Corridor. Y Matrix Analysis.: What Planning Can You Do With Y Matrix?Document2 pagesZ-Base Case. One Circuit Per Corridor. Y Matrix Analysis.: What Planning Can You Do With Y Matrix?Brett HendricksNo ratings yet
- Power Flow Analysis ExplainedDocument126 pagesPower Flow Analysis ExplainedhakandaghanNo ratings yet
- Power Flow Analysis SummaryDocument10 pagesPower Flow Analysis SummaryOkwalNo ratings yet
- Load Flow Study Using Gauss-Seidel Method GSLF Theory and Tutorial PDFDocument3 pagesLoad Flow Study Using Gauss-Seidel Method GSLF Theory and Tutorial PDFRobert DcruzNo ratings yet
- Esigelec PTD 2powerflow FinalDocument63 pagesEsigelec PTD 2powerflow Finalremi.brugeilleNo ratings yet
- Class3 Chapter 2Document20 pagesClass3 Chapter 2Ushasree ConduiraNo ratings yet
- ECE4762011 Lect12Document32 pagesECE4762011 Lect12Jesse VenzorNo ratings yet
- EE 368 Chapter 1 ModDocument93 pagesEE 368 Chapter 1 ModJames AnokyeNo ratings yet
- Load Flow CoursesFileDocument73 pagesLoad Flow CoursesFileraven wolfNo ratings yet
- The DC Power Flow EquationsDocument25 pagesThe DC Power Flow EquationsDaryAntoNo ratings yet
- Newton Raphson MethodDocument22 pagesNewton Raphson MethodSachinNo ratings yet
- Lecture 12Document33 pagesLecture 12Jaafar AbbakarNo ratings yet
- Lecture 15 Transient Stability SolutionsDocument54 pagesLecture 15 Transient Stability SolutionsManuelNo ratings yet
- PE351 Lect9 2020Document26 pagesPE351 Lect9 2020Abdul RazzaqNo ratings yet
- NR Application To Power FlowDocument17 pagesNR Application To Power FlowSrinivas YelisettiNo ratings yet
- Power Flow Problem SolverDocument17 pagesPower Flow Problem SolverMohamed A. HusseinNo ratings yet
- ZbusDocument34 pagesZbusErandikaNo ratings yet
- Power Flow AnalysisDocument39 pagesPower Flow AnalysisDemelash BekeleNo ratings yet
- Introduction To Power System Analysis: Node Equations: The Bus Admittance MatrixDocument19 pagesIntroduction To Power System Analysis: Node Equations: The Bus Admittance MatrixSaikat MahmudNo ratings yet
- PPTDocument28 pagesPPTSri RamNo ratings yet
- Introduction To Load FlowDocument5 pagesIntroduction To Load FlowFake NameNo ratings yet
- Load Flow AnalysisDocument50 pagesLoad Flow AnalysisKaddu TitusNo ratings yet
- Module 4.1Document38 pagesModule 4.1JASPER PAYAPAYANo ratings yet
- Module 4.1Document38 pagesModule 4.1JASPER PAYAPAYANo ratings yet
- Load Flow 20 Feb.2018Document38 pagesLoad Flow 20 Feb.2018MUBANGIZI FELEXNo ratings yet
- NR Application to Power Flow SolvingDocument23 pagesNR Application to Power Flow SolvingFawzi RadwanNo ratings yet
- Tapered BeamDocument3 pagesTapered Beamlamkinpark3373No ratings yet
- EE 369 Power System Analysis Transmission Line ModelsDocument33 pagesEE 369 Power System Analysis Transmission Line ModelsShuhan Mohammad Ariful HoqueNo ratings yet
- Basic Electrical Engineering (BEEE101L) : Presented byDocument26 pagesBasic Electrical Engineering (BEEE101L) : Presented byAsh wanthNo ratings yet
- NR Application to Power Flow EquationsDocument23 pagesNR Application to Power Flow EquationsFawzi RadwanNo ratings yet
- Unit 2 PDFDocument39 pagesUnit 2 PDFMoulod Mouloud100% (1)
- Power System AnDocument32 pagesPower System AnWilfred AsonmwonririNo ratings yet
- The DC Power Flow EquationsDocument22 pagesThe DC Power Flow EquationsPeter JumreNo ratings yet
- Newton-Raphson Power Flow Notes 3Document34 pagesNewton-Raphson Power Flow Notes 3Snr Berel ShepherdNo ratings yet
- Optimum Power Flow Analysis by Newton Raphson Method, A Case StudyDocument9 pagesOptimum Power Flow Analysis by Newton Raphson Method, A Case StudyNurul Ain RosdiNo ratings yet
- Wien Bridge Oscillator With Real Amplifiers: September 2015Document39 pagesWien Bridge Oscillator With Real Amplifiers: September 2015Manoj KhatriNo ratings yet
- Lecture 18: State Estimation: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityDocument26 pagesLecture 18: State Estimation: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityManuelNo ratings yet
- Wave Analysis of LineDocument31 pagesWave Analysis of LineSYAHRINA MEILANI hoamNo ratings yet
- Power System Analysis: Transformers, Load & Generator Models, YbusDocument33 pagesPower System Analysis: Transformers, Load & Generator Models, YbusAhmedKhaledSalahNo ratings yet
- 01M Equivalent CircuitDocument43 pages01M Equivalent Circuitবিবেক রত্নNo ratings yet
- 02M PU CalculationsDocument62 pages02M PU Calculationsবিবেক রত্নNo ratings yet
- 01F Symmetrical Components LecturesDocument10 pages01F Symmetrical Components Lecturesবিবেক রত্নNo ratings yet
- Representations of Power System ComponentsDocument46 pagesRepresentations of Power System Componentsবিবেক রত্নNo ratings yet
- 01F 01 Symmetrical Components LecturesDocument30 pages01F 01 Symmetrical Components Lecturesবিবেক রত্নNo ratings yet
- Representations of Power System ComponentsDocument46 pagesRepresentations of Power System Componentsবিবেক রত্নNo ratings yet
- Drive Unit TENH EH 10003, 225, 50/60Hz 400/440V: Qty. Description Specification Material Size DT Doc IdDocument1 pageDrive Unit TENH EH 10003, 225, 50/60Hz 400/440V: Qty. Description Specification Material Size DT Doc IdKarikalan JayNo ratings yet
- FLIX Booking 1068813091Document2 pagesFLIX Booking 1068813091Pavan SadaraNo ratings yet
- HQ 170aDocument82 pagesHQ 170aTony WellsNo ratings yet
- TUTO 4 PU Sol PDFDocument21 pagesTUTO 4 PU Sol PDFVievie Le BluewberrietrufflesNo ratings yet
- 5 Short MustWatch Motivational Videos For TeachersrccymDocument4 pages5 Short MustWatch Motivational Videos For Teachersrccymfoxpeak8No ratings yet
- Aclu List Research Export 20160810050210Document2 pagesAclu List Research Export 20160810050210api-285701682100% (1)
- Engine Tune-UpDocument43 pagesEngine Tune-UpЮра ПетренкоNo ratings yet
- Space Management Guidelines: Brief SummaryDocument17 pagesSpace Management Guidelines: Brief SummaryMOHD JIDINo ratings yet
- TD2Document4 pagesTD2Terry ChoiNo ratings yet
- Task 7 Family Disaster Risk Reduction and Management PlanDocument7 pagesTask 7 Family Disaster Risk Reduction and Management PlanHaise SasakiNo ratings yet
- Quiz 1 Answers Fusionné CompresséDocument161 pagesQuiz 1 Answers Fusionné CompresséSlim Charni100% (1)
- Datasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Document5 pagesDatasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Gherel TocasNo ratings yet
- DVD S2300Document106 pagesDVD S2300cristakeNo ratings yet
- Subhasis Patra CV V3Document5 pagesSubhasis Patra CV V3Shubh SahooNo ratings yet
- Nursing Grand Rounds Reviewer PDFDocument17 pagesNursing Grand Rounds Reviewer PDFAlyssa Jade GolezNo ratings yet
- Electricity Began With Man's Curiosity On The Peculiar Ability of Amber and Lodestone To Attract Other Material.Document2 pagesElectricity Began With Man's Curiosity On The Peculiar Ability of Amber and Lodestone To Attract Other Material.Axle Rose CastroNo ratings yet
- BS 3892-1 1997 - Pulverized-Fuel AshDocument22 pagesBS 3892-1 1997 - Pulverized-Fuel Ashmykel_dp100% (1)
- DC Motor Load Characteristics ExperimentDocument6 pagesDC Motor Load Characteristics Experimentbilalkhan3567No ratings yet
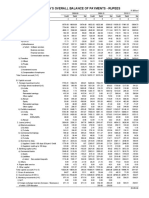
- Table 141: India'S Overall Balance of Payments - RupeesDocument2 pagesTable 141: India'S Overall Balance of Payments - Rupeesmahbobullah rahmaniNo ratings yet
- Event Management Study Material Free PDFDocument2 pagesEvent Management Study Material Free PDFKim0% (1)
- Design Thinking ReflectionDocument3 pagesDesign Thinking ReflectionNeil PerlasNo ratings yet
- People v. ChuaDocument1 pagePeople v. ChuaErnie Gultiano100% (1)
- Rotating EquipmentDocument3 pagesRotating EquipmentSathish DesignNo ratings yet
- Workplace 2017Document8 pagesWorkplace 2017Vesign MediaNo ratings yet
- Unit 8 Grammar Short Test 1 A+B Impulse 2Document1 pageUnit 8 Grammar Short Test 1 A+B Impulse 2karpiarzagnieszka1No ratings yet
- UmehDocument2 pagesUmehAdeleke AyobamiNo ratings yet
- B.Tech Digital Principles and System Design Exam Question BankDocument24 pagesB.Tech Digital Principles and System Design Exam Question Bankdigital1206No ratings yet
- Gliffy Public Diagram - ATM FlowchartDocument3 pagesGliffy Public Diagram - ATM Flowchartmy nNo ratings yet
- 03board of Directors Resolution For AGRONetBIZ ENGLISHDocument1 page03board of Directors Resolution For AGRONetBIZ ENGLISHyuswirdaNo ratings yet
- Ultra Life ER14250 DatasheetDocument2 pagesUltra Life ER14250 DatasheetArslan AwanNo ratings yet