You might also like
- ECE 476 Power System AnalysisDocument30 pagesECE 476 Power System AnalysisWajahat Ullah Khan TareenNo ratings yet
- EE453 LECT 2a - Power FlowDocument34 pagesEE453 LECT 2a - Power FlowOburu David KatandiNo ratings yet
- Load Flow Solution Using Gauss IterationDocument61 pagesLoad Flow Solution Using Gauss Iterationবিবেক রত্নNo ratings yet
- ECE4762011 Lect12Document32 pagesECE4762011 Lect12Engr.Arslan AbbasNo ratings yet
- 2-Power Flow AnalysisDocument56 pages2-Power Flow AnalysisFady MichealNo ratings yet
- Lecture 11Document39 pagesLecture 11HossamKamalNo ratings yet
- Power FlowDocument33 pagesPower FlowbaboyasoNo ratings yet
- ECE 333 Lecture 14: Power Flow Analysis with Newton-Raphson MethodDocument43 pagesECE 333 Lecture 14: Power Flow Analysis with Newton-Raphson MethodrdelgranadoNo ratings yet
- CircuitanlyDocument32 pagesCircuitanlysetsindia3735No ratings yet
- ECE 476 Power System Analysis: Lecture 11: Ybus, Power FlowDocument32 pagesECE 476 Power System Analysis: Lecture 11: Ybus, Power FlowFady MichealNo ratings yet
- Sistemas Eléctricos de Potencia (SEP)Document13 pagesSistemas Eléctricos de Potencia (SEP)Nicolas Castro GuerraNo ratings yet
- Gauss Seidel MethodNewDocument45 pagesGauss Seidel MethodNewMehmood MalikNo ratings yet
- Lecture 18: State Estimation: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityDocument26 pagesLecture 18: State Estimation: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityManuelNo ratings yet
- PSSe Workshop Day 2Document91 pagesPSSe Workshop Day 2Steve Musarurwa100% (2)
- Power System Analysis: Transformers, Load & Generator Models, YbusDocument34 pagesPower System Analysis: Transformers, Load & Generator Models, YbusOladeji Ifedayo RNo ratings yet
- Load Flow Analysis Voltage CalculationDocument23 pagesLoad Flow Analysis Voltage Calculationdubuli123No ratings yet
- Node-Voltage Analysis of Resistive Circuit in The Context of DC Voltages and CurrentsDocument10 pagesNode-Voltage Analysis of Resistive Circuit in The Context of DC Voltages and Currentsanand agarwalNo ratings yet
- ECE4762007 Lect12Document42 pagesECE4762007 Lect12Salvador JovenNo ratings yet
- ECE4762011 Lect12Document32 pagesECE4762011 Lect12Jesse VenzorNo ratings yet
- Exam 1 SolutionsDocument6 pagesExam 1 SolutionsMaruf MorshedNo ratings yet
- Load Flow Study Using Gauss-Seidel Method GSLF Theory and Tutorial PDFDocument3 pagesLoad Flow Study Using Gauss-Seidel Method GSLF Theory and Tutorial PDFRobert DcruzNo ratings yet
- Circuit Analysis Lecture 3 and 4Document6 pagesCircuit Analysis Lecture 3 and 4Hyder GamingNo ratings yet
- NR Application to Power Flow SolvingDocument23 pagesNR Application to Power Flow SolvingFawzi RadwanNo ratings yet
- V I V A: Example 5.5: - SolutionDocument15 pagesV I V A: Example 5.5: - SolutionqureshiNo ratings yet
- Class3 Chapter 2Document20 pagesClass3 Chapter 2Ushasree ConduiraNo ratings yet
- Esigelec PTD 2powerflow FinalDocument63 pagesEsigelec PTD 2powerflow Finalremi.brugeilleNo ratings yet
- The DC Power Flow EquationsDocument25 pagesThe DC Power Flow EquationsDaryAntoNo ratings yet
- NR Application To Power FlowDocument17 pagesNR Application To Power FlowSrinivas YelisettiNo ratings yet
- Lecture 12Document33 pagesLecture 12Jaafar AbbakarNo ratings yet
- E11 Lab 6Document15 pagesE11 Lab 6marcosscaratoNo ratings yet
- Gauss-Seidel Method Power Flow SolutionDocument32 pagesGauss-Seidel Method Power Flow SolutionGerhan Pradana0% (1)
- Load Flow AnalysisDocument35 pagesLoad Flow AnalysisSachinNo ratings yet
- NR Application to Power Flow EquationsDocument23 pagesNR Application to Power Flow EquationsFawzi RadwanNo ratings yet
- Newton Raphson MethodDocument22 pagesNewton Raphson MethodSachinNo ratings yet
- EE 368 Chapter 1 ModDocument93 pagesEE 368 Chapter 1 ModJames AnokyeNo ratings yet
- Z-Base Case. One Circuit Per Corridor. Y Matrix Analysis.: What Planning Can You Do With Y Matrix?Document2 pagesZ-Base Case. One Circuit Per Corridor. Y Matrix Analysis.: What Planning Can You Do With Y Matrix?Brett HendricksNo ratings yet
- Solutions: Solutions Manual For Sensors and Actuators Engineering System Instrumentation 2Nd Edition SilvaDocument47 pagesSolutions: Solutions Manual For Sensors and Actuators Engineering System Instrumentation 2Nd Edition SilvaTumbal Gb0% (3)
- EE287 Lecture 2Document86 pagesEE287 Lecture 2obedNo ratings yet
- Load Flow AnalysisDocument50 pagesLoad Flow AnalysisKaddu TitusNo ratings yet
- Lecture 15 Transient Stability SolutionsDocument54 pagesLecture 15 Transient Stability SolutionsManuelNo ratings yet
- Power Flow Analysis ExplainedDocument126 pagesPower Flow Analysis ExplainedhakandaghanNo ratings yet
- Load Flow Studies - Lecture Notes 2Document29 pagesLoad Flow Studies - Lecture Notes 2Snr Berel Shepherd100% (1)
- Sensors and Actuators Engineering System Instrumentation 2nd Silva Solution ManualDocument36 pagesSensors and Actuators Engineering System Instrumentation 2nd Silva Solution Manualspunkycantingzcat100% (49)
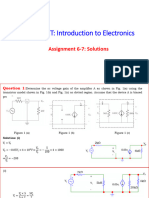
- A6-7_solDocument39 pagesA6-7_solanshikamittal1807No ratings yet
- Load Flow Analysis Explained in 40 CharactersDocument42 pagesLoad Flow Analysis Explained in 40 CharactersTahir KedirNo ratings yet
- Full Download Sensors and Actuators Engineering System Instrumentation 2nd Silva Solution Manual PDF Full ChapterDocument36 pagesFull Download Sensors and Actuators Engineering System Instrumentation 2nd Silva Solution Manual PDF Full Chaptertapestryobediblewjhc100% (20)
- Distribution System Modeling and Analysis Electric 1 284 299Document16 pagesDistribution System Modeling and Analysis Electric 1 284 299Kampret CebongNo ratings yet
- Circuit Theory 1 C3 Analysis MethodsDocument54 pagesCircuit Theory 1 C3 Analysis Methodshaseeb tNo ratings yet
- Newton-Raphson Power Flow Notes 3Document34 pagesNewton-Raphson Power Flow Notes 3Snr Berel ShepherdNo ratings yet
- Circuit 4Document5 pagesCircuit 4richy launcherNo ratings yet
- SM Chapter 25 - Solucionario Capitulo 25 Serway 7ma Edición SM Chapter 25 - Solucionario Capitulo 25 Serway 7ma EdiciónDocument27 pagesSM Chapter 25 - Solucionario Capitulo 25 Serway 7ma Edición SM Chapter 25 - Solucionario Capitulo 25 Serway 7ma EdiciónBruno Sauñe IntriagoNo ratings yet
- 6 - Chapter 5Document13 pages6 - Chapter 5AhmedNo ratings yet
- HW2 SolutionDocument10 pagesHW2 Solution劉德信No ratings yet
- Ieai Lab File: Name: Yuvan Saroya ROLL NO.: 2K18/PSY/16 M.Tech Psy 1St SemDocument26 pagesIeai Lab File: Name: Yuvan Saroya ROLL NO.: 2K18/PSY/16 M.Tech Psy 1St SemNitin SharmaNo ratings yet
- Circuit Theorems Explained: Homogeneity, Additivity, Superposition, Source Transformation & Thevenin's TheoremDocument102 pagesCircuit Theorems Explained: Homogeneity, Additivity, Superposition, Source Transformation & Thevenin's Theoremyi yang GuNo ratings yet
- EE287Lecture NodalAnalysis1Document42 pagesEE287Lecture NodalAnalysis1odurojesse310504No ratings yet
- Advanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandAdvanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- Items For SellDocument1 pageItems For SellWajahat Ullah Khan TareenNo ratings yet
- ECE 476 Power System Analysis: Symmetrical Components and Unbalanced FaultsDocument30 pagesECE 476 Power System Analysis: Symmetrical Components and Unbalanced FaultsRichinelNo ratings yet
- ECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisDocument40 pagesECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisWajahat Ullah Khan TareenNo ratings yet
- ECE 476 Power System Analysis: Lecture 21: Unbalanced Faults, ProtectionDocument31 pagesECE 476 Power System Analysis: Lecture 21: Unbalanced Faults, ProtectionsohaibNo ratings yet
- ECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisDocument40 pagesECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisWajahat Ullah Khan TareenNo ratings yet
- Solar Energy in PakistanDocument9 pagesSolar Energy in PakistanAamir LaghariNo ratings yet
- ECE 476 Power System Analysis Lecture 18: Optimal Power Flow (OPF), Short CircuitDocument31 pagesECE 476 Power System Analysis Lecture 18: Optimal Power Flow (OPF), Short CircuitNamiraNo ratings yet
- Quiz Samples With CLO PDFDocument3 pagesQuiz Samples With CLO PDFWajahat Ullah Khan TareenNo ratings yet
- Driving LicenceDocument7 pagesDriving LicenceWajahat Ullah Khan TareenNo ratings yet
- DC Motor, Generators and Energy Conversion DevicesDocument1 pageDC Motor, Generators and Energy Conversion DevicesWajahat Ullah Khan TareenNo ratings yet
- Fall 2014 Et332a14Document14 pagesFall 2014 Et332a14Wajahat Ullah Khan TareenNo ratings yet
- Pakistan SP Potential To Produce From BiomassDocument15 pagesPakistan SP Potential To Produce From BiomassJaweria AtharNo ratings yet
- EE 555 - Renewable Energy Systems - Hassan Abbas KhanDocument22 pagesEE 555 - Renewable Energy Systems - Hassan Abbas KhanWajahat Ullah Khan TareenNo ratings yet
- Renewable EnergyDocument9 pagesRenewable EnergySudhir RavipudiNo ratings yet
- EE 555 - Renewable Energy Systems - Hassan Abbas Khan PDFDocument3 pagesEE 555 - Renewable Energy Systems - Hassan Abbas Khan PDFWajahat Ullah Khan TareenNo ratings yet
- URGENT !!!!!! Middle Room For Rent On 21 November 2014Document1 pageURGENT !!!!!! Middle Room For Rent On 21 November 2014Wajahat Ullah Khan TareenNo ratings yet
- BA II Plus 說明書Document114 pagesBA II Plus 說明書qaztemp01No ratings yet
- Board of Advanced Studies and Research Cecos University of It and Emerging SciencesDocument9 pagesBoard of Advanced Studies and Research Cecos University of It and Emerging SciencesWajahat Ullah Khan TareenNo ratings yet
- Application of STATCOM For Improved Reliability of Power Grid Containing A Wind TurbineDocument7 pagesApplication of STATCOM For Improved Reliability of Power Grid Containing A Wind TurbineWajahat Ullah Khan TareenNo ratings yet
- Model of Three-Phase InverterDocument23 pagesModel of Three-Phase Invertercuteabhi47No ratings yet
- Country Requirement Sheet 2015 Intake 20140209010956Document3 pagesCountry Requirement Sheet 2015 Intake 20140209010956Wajahat Ullah Khan TareenNo ratings yet
- 10 1 1 69 1112Document6 pages10 1 1 69 1112Maruthi KalpaguriNo ratings yet
- History PDFDocument9 pagesHistory PDFWajahat Ullah Khan TareenNo ratings yet
- English CV PDFDocument8 pagesEnglish CV PDFWajahat Ullah Khan TareenNo ratings yet
- California Solar Guide for Home InstallationsDocument40 pagesCalifornia Solar Guide for Home Installationsศิษย์เก่า ทีเจพีNo ratings yet
- Darwish PDFDocument8 pagesDarwish PDFWajahat Ullah Khan TareenNo ratings yet
- About You: Read This FirstDocument4 pagesAbout You: Read This FirstchaladhiNo ratings yet
- VAF9-Guidance (March 2009)Document4 pagesVAF9-Guidance (March 2009)Amir FarooquiNo ratings yet
- SWOT Vs TOWSDocument8 pagesSWOT Vs TOWSdhrruv kkNo ratings yet
- Controlling Routing Updates Traffic and Policy-Based Routing (PBR)Document22 pagesControlling Routing Updates Traffic and Policy-Based Routing (PBR)Sandro MeloNo ratings yet
- Surgical Nursing Lecture NotesDocument203 pagesSurgical Nursing Lecture NotesKwabena AmankwaNo ratings yet
- NSE IT Aadhar ExamDocument110 pagesNSE IT Aadhar ExamRajesh R100% (1)
- Comparison and Verification of Reliability Assessment Techniques For Fuel Cell-Based Hybrid Power System For ShipsDocument26 pagesComparison and Verification of Reliability Assessment Techniques For Fuel Cell-Based Hybrid Power System For ShipsMuhammad KurniawanNo ratings yet
- Updated Spare Parts For QC & RTGDocument6 pagesUpdated Spare Parts For QC & RTGvicente tanNo ratings yet
- The Importance of Additive ManufacturingDocument9 pagesThe Importance of Additive ManufacturingraviNo ratings yet
- TypesDocument6 pagesTypesChudhary JunaidNo ratings yet
- CA Service Desk Manager 14.1: Configuring Incident and Problem Management 200Document39 pagesCA Service Desk Manager 14.1: Configuring Incident and Problem Management 200Carlos HuertasNo ratings yet
- Position of Ipv4 in Tcp/Ip Protocol SuiteDocument19 pagesPosition of Ipv4 in Tcp/Ip Protocol SuiteAyushi GuptaNo ratings yet
- Cna Part7Document10 pagesCna Part7AlnZmNo ratings yet
- Introduction to Digital Control SystemsDocument70 pagesIntroduction to Digital Control SystemsAmruth Thelkar67% (3)
- Maintenance AUDIT InfoDocument3 pagesMaintenance AUDIT InfoShankaranarayanan GopalNo ratings yet
- Understanding Batch File Distribution Packages v1.4 PDFDocument44 pagesUnderstanding Batch File Distribution Packages v1.4 PDFAdrian AdunaNo ratings yet
- 1992-03 The Computer Paper - BC Edition PDFDocument96 pages1992-03 The Computer Paper - BC Edition PDFthecomputerpaperNo ratings yet
- Connect digital gauges and devices to applications with InGuage USB interfaceDocument2 pagesConnect digital gauges and devices to applications with InGuage USB interfaceboonlueNo ratings yet
- Digital Photo Pro - November 2014 USADocument100 pagesDigital Photo Pro - November 2014 USASima DragosNo ratings yet
- Inventor AddINDocument27 pagesInventor AddINgwyderNo ratings yet
- Simulationreporttemplate 2007Document14 pagesSimulationreporttemplate 2007Juan Carlos DiazNo ratings yet
- The Institute of Cost Accountants of India: SAP Finance Power User Course & SAP Learning HubDocument6 pagesThe Institute of Cost Accountants of India: SAP Finance Power User Course & SAP Learning Hubchaitanya vutukuriNo ratings yet
- 6se3190 0XX87 8BF0 Opm Clear Text Display Siemens ManualDocument76 pages6se3190 0XX87 8BF0 Opm Clear Text Display Siemens Manualyoshdog@gmail.comNo ratings yet
- INFO EDGE (INDIA) LIMITED (Standalone)Document2 pagesINFO EDGE (INDIA) LIMITED (Standalone)Arjun SomanNo ratings yet
- AssignmentDocument8 pagesAssignmentdillumiya132No ratings yet
- Factory Physics 3rd Edition PDF DownloadDocument2 pagesFactory Physics 3rd Edition PDF DownloadJanet16% (19)
- Virtual Assistant 30 Day QuickStart PlanDocument6 pagesVirtual Assistant 30 Day QuickStart PlanGaby TudangNo ratings yet
- Service Training: Mcube Technology Co., LTDDocument54 pagesService Training: Mcube Technology Co., LTDJeosafá PereiraNo ratings yet
- Connecting To Linux Using PuttyDocument9 pagesConnecting To Linux Using Puttydilip4682794No ratings yet
- Unit IV Question Bank MV 2019 MDOFs PDFDocument2 pagesUnit IV Question Bank MV 2019 MDOFs PDFSachin BharadwajNo ratings yet
- Secure Coding Practices For: White PaperDocument15 pagesSecure Coding Practices For: White Papererica jayasunderaNo ratings yet
- Revised Instructions To File An Assumed Name Certificate - 2015Document3 pagesRevised Instructions To File An Assumed Name Certificate - 2015Herich, Douglas Joseph, a living man - dba DOUGLAS JOSEPH HERICH, entity ID 82473600002997% (77)