You might also like
- Study Nervous SystemDocument2 pagesStudy Nervous SystemIoana Temeliescu Ex Zamfir100% (4)
- The Sparkcharts Algebra IDocument4 pagesThe Sparkcharts Algebra IMuhammad Fariz Mohamed Zain88% (8)
- Calculus Reference (SparkCharts)Document2 pagesCalculus Reference (SparkCharts)www_webb100% (1)
- BarCharts QuickStudy Business Facts PDFDocument4 pagesBarCharts QuickStudy Business Facts PDF220479100% (1)
- Muscular System (Quick Study Academic) - Inc. BarChartsDocument4 pagesMuscular System (Quick Study Academic) - Inc. BarChartskogawobu0% (2)
- Quick Study Weights & Measures PDFDocument4 pagesQuick Study Weights & Measures PDFheysemberg100% (6)
- SC Physics FormulasDocument2 pagesSC Physics Formulashassan75% (4)
- Astronomy PDFDocument6 pagesAstronomy PDFJuan OchoaNo ratings yet
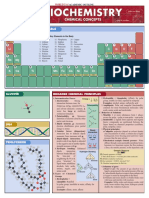
- Biochemical Periodic Table: Key Elements in The BodyDocument6 pagesBiochemical Periodic Table: Key Elements in The BodyEline Moyo100% (1)
- Emt - Emergency Medical Technician (Quick Study Academic) - Inc. BarChartsDocument4 pagesEmt - Emergency Medical Technician (Quick Study Academic) - Inc. BarChartsgoticifa0% (2)
- QuickStudy - Lymphatic SystemDocument2 pagesQuickStudy - Lymphatic SystemEmina Borovac100% (2)
- Quick Study Academic Physics 600dpiDocument6 pagesQuick Study Academic Physics 600dpiMartin BotrosNo ratings yet
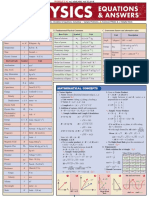
- Quick Study - Physics Equations & AnswersDocument6 pagesQuick Study - Physics Equations & AnswersjavierfajardoNo ratings yet
- BarCharts QuickStudy Anatomy Vol 2 PDFDocument6 pagesBarCharts QuickStudy Anatomy Vol 2 PDFRichard Harrow100% (7)
- QuickStudy FinanceDocument4 pagesQuickStudy FinanceAnge William Kouadio100% (1)
- Math Review - QsDocument4 pagesMath Review - Qsalberthawking100% (8)
- Quick Study - Biology PDFDocument4 pagesQuick Study - Biology PDFPh SamerNo ratings yet
- (A. Thomas Fenik) Strategic Management (Quickstudy PDFDocument4 pages(A. Thomas Fenik) Strategic Management (Quickstudy PDFZewdu Tsegaye100% (4)
- Tips - Barcharts Quickstudy Psychology PDFDocument4 pagesTips - Barcharts Quickstudy Psychology PDFsmacuja100% (1)
- (Quickstudy - Academic) Inc. BarCharts - Geometric Formulas-QuickStudy (2005)Document6 pages(Quickstudy - Academic) Inc. BarCharts - Geometric Formulas-QuickStudy (2005)Dany el100% (2)
- Htmlchart 0 XDocument6 pagesHtmlchart 0 XNaman Mittal100% (1)
- Chemistry Equations Answers QuickstudyDocument6 pagesChemistry Equations Answers QuickstudyRafael Ramos100% (6)
- Keys To High School SuccessDocument4 pagesKeys To High School SuccessTom Senberg100% (1)
- Computer Shortcuts PDFDocument2 pagesComputer Shortcuts PDFzqzifvkk100% (4)
- Animal GKDocument4 pagesAnimal GKSARVEJAYA KRISHNANo ratings yet
- Dental Anatomy Reference Guide - (Malestrom)Document2 pagesDental Anatomy Reference Guide - (Malestrom)ronaldricardo_ladiesman01100% (1)
- Chemistry - Periodic Table - Advanced PDFDocument2 pagesChemistry - Periodic Table - Advanced PDFCA_Ken86% (7)
- Periodic Table Basic, 2nd EditionDocument2 pagesPeriodic Table Basic, 2nd EditionMaki MajomNo ratings yet
- (Quickstudy Reference Guides - Academic) Mark Jackson - Chemistry Lab Basics-Barcharts (2002) PDFDocument2 pages(Quickstudy Reference Guides - Academic) Mark Jackson - Chemistry Lab Basics-Barcharts (2002) PDFLouis Nguyen100% (4)
- Quick Study FinanceDocument4 pagesQuick Study FinanceFrancis Kwame OwireduNo ratings yet
- Quick Study For Financial RatiosDocument2 pagesQuick Study For Financial RatiosMio Fitrananto PerdaniNo ratings yet
- BarCharts QuickStudy Academics Parliamentary Procedures (BarCharts) (Z-Library)Document4 pagesBarCharts QuickStudy Academics Parliamentary Procedures (BarCharts) (Z-Library)Qareen Sarmaan100% (1)
- Algebraic EquationsDocument4 pagesAlgebraic EquationsSammar Ellahi100% (4)
- BarChartsInc 2014 NewProductDevelopment OperationsManagementDocument1 pageBarChartsInc 2014 NewProductDevelopment OperationsManagementJohn Michael SorianoNo ratings yet
- BarCharts QuickStudy Memorial DayDocument2 pagesBarCharts QuickStudy Memorial DayBrandon WangNo ratings yet
- Nursing Care Procedures Quickstudy AcademicDocument6 pagesNursing Care Procedures Quickstudy Academicajcsousa100% (3)
- In The Classroom Study Strategies: Better GradesDocument4 pagesIn The Classroom Study Strategies: Better GradesAloah122346100% (1)
- FE/EIT Dynamics Sample ProblemsDocument37 pagesFE/EIT Dynamics Sample Problemscasper911ca100% (1)
- Hanuman ChalisaDocument2 pagesHanuman ChalisaJeetender nathNo ratings yet
- Iit Jee StudyDocument955 pagesIit Jee StudyGarlapati Srinivasa Rao88% (17)
- Revise Physics in 1days PDFDocument141 pagesRevise Physics in 1days PDFAkshat PandeyNo ratings yet
- Road Safety Project PowerPoint PresentationDocument60 pagesRoad Safety Project PowerPoint PresentationRoadSafety82% (44)
- UBC ASHRAE Competition Report PDFDocument34 pagesUBC ASHRAE Competition Report PDFmech118100% (1)
- Spark Charts - NursingDocument4 pagesSpark Charts - Nursinggeminix92100% (1)
- Chapter 12-15Document59 pagesChapter 12-15Abdulaziz FarhanNo ratings yet
- Dynamica Mehanika DDDDDDDDDFFFDocument57 pagesDynamica Mehanika DDDDDDDDDFFFLeonard ReinaNo ratings yet
- Rigid Body Dynamics - Chap 12-14Document51 pagesRigid Body Dynamics - Chap 12-14Na2ryNo ratings yet
- 12 7Document17 pages12 7Sekut TawarNo ratings yet
- Chapter 12: Kinematics of A ParticleDocument10 pagesChapter 12: Kinematics of A ParticleStrider TeepeeNo ratings yet
- Dynamics: Lesson OutcomesDocument7 pagesDynamics: Lesson OutcomesNaqib NordinNo ratings yet
- Kinematics Lecture 1 ParticleDocument43 pagesKinematics Lecture 1 ParticlethodatisampathNo ratings yet
- SN Sec 12-4 12-5Document19 pagesSN Sec 12-4 12-5bigbangmelvanNo ratings yet
- 2 +Kinematics+of+particles+-+Part+IIDocument43 pages2 +Kinematics+of+particles+-+Part+IIBEYZA ÇAVUŞOĞLUNo ratings yet
- 6.7 Introduction Dynamics in Three Dimensions A. General PrinciplesDocument12 pages6.7 Introduction Dynamics in Three Dimensions A. General PrincipleselvyNo ratings yet
- Isu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotionDocument22 pagesIsu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotioneysNo ratings yet
- Kinematics Using Vector Analysis: Standard CompetencyDocument18 pagesKinematics Using Vector Analysis: Standard CompetencyYasheive saadiNo ratings yet
- Introduction & Rectilinear Kinematics: Continuous Motion: Today's ObjectivesDocument17 pagesIntroduction & Rectilinear Kinematics: Continuous Motion: Today's Objectivesجعفر السلطانNo ratings yet
- x3 PDFDocument64 pagesx3 PDFfadiNo ratings yet
- Lec 1 ADocument18 pagesLec 1 ASaad AhmadNo ratings yet
- PE2113-Chapter 12 - Dynamics - Draft1Document115 pagesPE2113-Chapter 12 - Dynamics - Draft1Mohammed AlkhalifaNo ratings yet
- Curvilinear Motion and ProjectilesDocument15 pagesCurvilinear Motion and ProjectilesAltammar1367% (3)
- QSB 6.7 230 3000 Id-08may13 PDFDocument3 pagesQSB 6.7 230 3000 Id-08may13 PDFmech118No ratings yet
- An Introduction To Internal Combustion EnginesDocument20 pagesAn Introduction To Internal Combustion Enginesmech118No ratings yet
- Ecq 01Document1 pageEcq 01AbiramiNaiduNo ratings yet
- Description of Sample Problems: To Features in LS-DYNADocument30 pagesDescription of Sample Problems: To Features in LS-DYNAmech118No ratings yet
- Ansys Workbench TutorialsDocument13 pagesAnsys Workbench Tutorialsmech118No ratings yet
- Computer-Aided Design (CAD), Also Known As Computer-Aided Design and Drafting (CADD)Document15 pagesComputer-Aided Design (CAD), Also Known As Computer-Aided Design and Drafting (CADD)mech118No ratings yet
- m (lb) r (in) Ѳ m (lb) r (in) Ѳ 1 1 3 30 1 3 210 2 0.5 4 40 0.5 4 220Document2 pagesm (lb) r (in) Ѳ m (lb) r (in) Ѳ 1 1 3 30 1 3 210 2 0.5 4 40 0.5 4 220mech118No ratings yet
- MMC ManualDocument6 pagesMMC Manualmech118No ratings yet
- Road Ethics: Presented ToDocument13 pagesRoad Ethics: Presented Tomech118No ratings yet
- BeltsDocument2 pagesBeltsmech118No ratings yet