You might also like
- Mercedes-Benz Sprinter Engine TypesDocument2 pagesMercedes-Benz Sprinter Engine TypesJack Norhy100% (1)
- Adder and Flip-Flop 2EL11Document19 pagesAdder and Flip-Flop 2EL11CogCoilNo ratings yet
- Adder and Subtractor Circuits PDFDocument8 pagesAdder and Subtractor Circuits PDFSoumya Ranjan MohantyNo ratings yet
- Root Cause Analysis PresentationDocument37 pagesRoot Cause Analysis PresentationucheonixNo ratings yet
- Chapter - Fuzzy LogicDocument6 pagesChapter - Fuzzy LogicModdy CavallindoNo ratings yet
- Sequential Logic NotesDocument25 pagesSequential Logic NotesDOOAMADAANo ratings yet
- Addition Function in Logic GateDocument5 pagesAddition Function in Logic GateYosif AlanesiNo ratings yet
- 2EL11-Digital Electronic - Adder and Flip-Flop Circuits: Pusat Pengajian Sains Fizik Universiti Sains MalaysiaDocument8 pages2EL11-Digital Electronic - Adder and Flip-Flop Circuits: Pusat Pengajian Sains Fizik Universiti Sains MalaysiaCogCoilNo ratings yet
- Lecture 12 - 4Document4 pagesLecture 12 - 4AwadHilmyNo ratings yet
- Chap6 SDocument61 pagesChap6 SRaghad AlnajimNo ratings yet
- Introduction To: Information RetrievalDocument31 pagesIntroduction To: Information RetrievalTamizharasi ANo ratings yet
- 10 32ps2solutionDocument11 pages10 32ps2solutionMABUKE NDINAINWI INNOCENTIANo ratings yet
- flow control.كاملDocument14 pagesflow control.كاملali salmanNo ratings yet
- Logic Gates, Truth Tables, Operator PrecedenceDocument9 pagesLogic Gates, Truth Tables, Operator PrecedenceSounak ChatterjeeNo ratings yet
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNo ratings yet
- Hand-Out Note On Buckley-Leverett AnalysisDocument9 pagesHand-Out Note On Buckley-Leverett Analysismexx4u2nvNo ratings yet
- Q KK A Gsin Q KK A Gsin: Uckley Everett NalysisDocument9 pagesQ KK A Gsin Q KK A Gsin: Uckley Everett NalysisduyvkNo ratings yet
- Q KK A Gsin Q KK A Gsin: Uckley Everett NalysisDocument9 pagesQ KK A Gsin Q KK A Gsin: Uckley Everett NalysisIrina AndreevaNo ratings yet
- Lec 2 Boolean AlgebraDocument44 pagesLec 2 Boolean AlgebraCatherine IvanaNo ratings yet
- Stepper Motor Controller Using 8051Document37 pagesStepper Motor Controller Using 8051gutzz0079197100% (2)
- Assignment #03: Submitted byDocument7 pagesAssignment #03: Submitted byMUHAMMAD ABDULLAHNo ratings yet
- Lab 06Document4 pagesLab 06AafaqIqbalNo ratings yet
- Combinational Logic Circuits Experiment 4Document11 pagesCombinational Logic Circuits Experiment 4Vince abcdNo ratings yet
- Odd and Even SortDocument3 pagesOdd and Even SortKevinNo ratings yet
- ECE18D - Updated Final Project ProposalDocument4 pagesECE18D - Updated Final Project ProposalRENIER JANE GAIDNo ratings yet
- DBminiprojectDocument11 pagesDBminiprojectPramodNo ratings yet
- Lecture 2 Inverted Index PDFDocument24 pagesLecture 2 Inverted Index PDFMuhammad NoumanNo ratings yet
- FlipFlop IntroductionDocument33 pagesFlipFlop IntroductionTeddy KhantNo ratings yet
- Assignment #03: Submitted byDocument7 pagesAssignment #03: Submitted byMUHAMMAD ABDULLAHNo ratings yet
- Bartelt Solutions ManualDocument63 pagesBartelt Solutions ManualInnocent PersonNo ratings yet
- EXPERIMENT # 5 - ECE 3A Cruz, JairehDale FDocument4 pagesEXPERIMENT # 5 - ECE 3A Cruz, JairehDale FJaireh Dale CruzNo ratings yet
- Full Adder 05122023 015308pmDocument4 pagesFull Adder 05122023 015308pmarmarking654No ratings yet
- Full Adders KHIZERDocument2 pagesFull Adders KHIZERmatran282No ratings yet
- 3-Bit Ripple Carry Adder and 3-Bit Subtractor in Unsigned Binary & 2's ComplementDocument6 pages3-Bit Ripple Carry Adder and 3-Bit Subtractor in Unsigned Binary & 2's ComplementmukulNo ratings yet
- Lecture 3 Deterministic Finite AutomataDocument29 pagesLecture 3 Deterministic Finite AutomatavbweuhvbwNo ratings yet
- CH 9Document21 pagesCH 9Yến PhanNo ratings yet
- Boolean Algebra Activity 1Document9 pagesBoolean Algebra Activity 1thilinipiyumika2No ratings yet
- Battery (New) Run Time CalculatorDocument7 pagesBattery (New) Run Time CalculatorJose Mata RamcharanNo ratings yet
- Lecture 2: RF Power: DR G Burt Lancaster University EngineeringDocument33 pagesLecture 2: RF Power: DR G Burt Lancaster University EngineeringTheano XirouchakiNo ratings yet
- 06102017-Boolean ExpressionsDocument9 pages06102017-Boolean ExpressionsPearl Anne ManilaNo ratings yet
- Sulam ProjectDocument21 pagesSulam ProjectAhmed RaeesNo ratings yet
- HeliDocument8 pagesHelidixade1732No ratings yet
- 3 PLC Program To Implement Various Boolean Functions With DonDocument2 pages3 PLC Program To Implement Various Boolean Functions With DonMaria GuerreroNo ratings yet
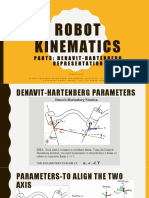
- Kinematics Part 3Document22 pagesKinematics Part 3fatinNo ratings yet
- DLC Lab Report 03Document13 pagesDLC Lab Report 03Carry GamingNo ratings yet
- EXPERIMENT # 4: Combinational Logic Circuits Name: - Date: - Equipment/Parts NeededDocument6 pagesEXPERIMENT # 4: Combinational Logic Circuits Name: - Date: - Equipment/Parts Neededblue24No ratings yet
- Mani MATLAB 4Document3 pagesMani MATLAB 4Gosh KreativityNo ratings yet
- HardaddsoftDocument8 pagesHardaddsoftSHYAMNo ratings yet
- Lab Report#1 Electronics-I: Submitted To: Submitted By: Reg No.: DateDocument7 pagesLab Report#1 Electronics-I: Submitted To: Submitted By: Reg No.: DateMuhammad SobanNo ratings yet
- Basic and Derived Logic GatesDocument33 pagesBasic and Derived Logic Gatesseyoum shimelsNo ratings yet
- EE-121 Chap06 AddersDocument26 pagesEE-121 Chap06 AddersAliNo ratings yet
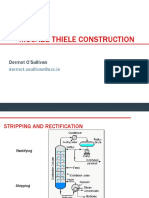
- McCabe Thiele ConstructionDocument50 pagesMcCabe Thiele ConstructionUmur Faruok Olumide SobayoNo ratings yet
- Rohail EEL A2Document2 pagesRohail EEL A2Mixter KhanNo ratings yet
- Ib Phys DC ESQ C 231118 135711Document32 pagesIb Phys DC ESQ C 231118 135711sammeaan khanNo ratings yet
- Adding Binary Numbers: Half and Full AddersDocument56 pagesAdding Binary Numbers: Half and Full AdderstylerNo ratings yet
- Calibration of A Bourdons Gauge Connected To Dead Weight TesterDocument5 pagesCalibration of A Bourdons Gauge Connected To Dead Weight TesterAdnAnKhanNo ratings yet
- 1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsFrom Everand1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsRating: 4 out of 5 stars4/5 (2)
- Caching On The Changing Web: Ying Xing May 17, 2001Document18 pagesCaching On The Changing Web: Ying Xing May 17, 2001ramachandraNo ratings yet
- Traffic Simulation DataDocument25 pagesTraffic Simulation DataramachandraNo ratings yet
- Background Voice Over Internet Protocol (VoIP) Is A Technology ForDocument4 pagesBackground Voice Over Internet Protocol (VoIP) Is A Technology ForramachandraNo ratings yet
- Web Caching ArchitDocument8 pagesWeb Caching ArchitramachandraNo ratings yet
- User Datagram Protocol (Udp)Document6 pagesUser Datagram Protocol (Udp)ramachandraNo ratings yet
- Searching: Deterministic Single-Agent: Andrew W. Moore Professor School of Computer Science Carnegie Mellon UniversityDocument45 pagesSearching: Deterministic Single-Agent: Andrew W. Moore Professor School of Computer Science Carnegie Mellon UniversityramachandraNo ratings yet
- Web Caching AlgDocument4 pagesWeb Caching AlgramachandraNo ratings yet
- SHA1 Encryption Algorithm: Adi - Amd ARM - DSP Group Lsi Logic ZSP Mips - TiDocument1 pageSHA1 Encryption Algorithm: Adi - Amd ARM - DSP Group Lsi Logic ZSP Mips - TiramachandraNo ratings yet
- Vikram Reddy AndemDocument68 pagesVikram Reddy Andemanon_838639460No ratings yet
- Metropolitan Road Traffic Simulation On FpgasDocument10 pagesMetropolitan Road Traffic Simulation On FpgasramachandraNo ratings yet
- Wake On LAN White PaperDocument9 pagesWake On LAN White PaperramachandraNo ratings yet
- Tea Tiny AlgorithmDocument4 pagesTea Tiny AlgorithmramachandraNo ratings yet
- Grid-Based Path-Finding: Abstract. Path-Finding Is An Important Problem For Many ApplicationsDocument12 pagesGrid-Based Path-Finding: Abstract. Path-Finding Is An Important Problem For Many ApplicationsramachandraNo ratings yet
- Page Replacement Algs DatagoodDocument22 pagesPage Replacement Algs DatagoodramachandraNo ratings yet
- Serial-Spec in JavaDocument84 pagesSerial-Spec in JavaramachandraNo ratings yet
- Modul APSI - SDLCDocument10 pagesModul APSI - SDLCHafizh ArdiNo ratings yet
- Defective Java Code: Mistakes That Matter: William PughDocument50 pagesDefective Java Code: Mistakes That Matter: William PughramachandraNo ratings yet
- OSI Layers and Network Design: Susan J. FagerDocument6 pagesOSI Layers and Network Design: Susan J. FagerramachandraNo ratings yet
- Dynamic Authentication by Typing Patterns TJHSST Senior Research Project Proposal Computer Systems Lab 2009-2010Document7 pagesDynamic Authentication by Typing Patterns TJHSST Senior Research Project Proposal Computer Systems Lab 2009-2010ramachandraNo ratings yet
- Neural 13Document34 pagesNeural 13api-3820297No ratings yet
- Introducing The Min-Max Algorithm: Paulo Pinto 28 July 2002Document11 pagesIntroducing The Min-Max Algorithm: Paulo Pinto 28 July 2002ramachandraNo ratings yet
- Osi DataDocument5 pagesOsi DataramachandraNo ratings yet
- Projects: How Much New Information Can Fit in Your Brain?Document11 pagesProjects: How Much New Information Can Fit in Your Brain?ramachandraNo ratings yet
- Projects: How Much New Information Can Fit in Your Brain?Document8 pagesProjects: How Much New Information Can Fit in Your Brain?ramachandraNo ratings yet
- Magic Packet Technology: White PaperDocument6 pagesMagic Packet Technology: White PaperramachandraNo ratings yet
- Bivariat Kendal Tau WordDocument2 pagesBivariat Kendal Tau WordSriwati S DatuamasNo ratings yet
- BIA Vs CCAADocument1 pageBIA Vs CCAAMike Ares LyonsNo ratings yet
- Philippine Trust v. Luzon SuretyDocument4 pagesPhilippine Trust v. Luzon Surety149890No ratings yet
- A Practical Guide To Doing Business in UgandaDocument31 pagesA Practical Guide To Doing Business in UgandaCharles LwangaNo ratings yet
- People v. Labajo - Motion For Leave of Court To File Demurrer To EvidenceDocument2 pagesPeople v. Labajo - Motion For Leave of Court To File Demurrer To EvidenceMarc Christian H. TangpuzNo ratings yet
- Exam 1 SolutionsDocument4 pagesExam 1 Solutionsgebretadios gebrekidanNo ratings yet
- Project Proposal: Secondary School Student Management System (Secman)Document10 pagesProject Proposal: Secondary School Student Management System (Secman)Oira AlexNo ratings yet
- Baofeng UV-5R Series Operating ManualDocument19 pagesBaofeng UV-5R Series Operating ManualRogerNo ratings yet
- How Much Method-In-Use Matters A Case Study of Agile and Waterfall Software Projects and Their Design Routine VariationDocument37 pagesHow Much Method-In-Use Matters A Case Study of Agile and Waterfall Software Projects and Their Design Routine Variationpmsergio palominoNo ratings yet
- Debugging Real-Time Multiprocessor Systems: Class #264, Embedded Systems Conference, Silicon Valley 2006Document15 pagesDebugging Real-Time Multiprocessor Systems: Class #264, Embedded Systems Conference, Silicon Valley 2006lathavenkyNo ratings yet
- Apollo Tyres Annual Report FY2023-260-274Document15 pagesApollo Tyres Annual Report FY2023-260-274Carrots TopNo ratings yet
- Ranpelen PP Random Copolymer: DescriptionDocument2 pagesRanpelen PP Random Copolymer: DescriptionVu Thanh ThuongNo ratings yet
- Capturing Carbon Existing Coal-Fired Power PlantsDocument10 pagesCapturing Carbon Existing Coal-Fired Power PlantsRoumen GuhaNo ratings yet
- Aug 55 XDocument15 pagesAug 55 XLoz LizNo ratings yet
- Westetal3e ch01Document24 pagesWestetal3e ch01biaskhjdafNo ratings yet
- Qualification Guideline - Microsoft AzureDocument79 pagesQualification Guideline - Microsoft AzureJSNo ratings yet
- DBMS SolutionDocument64 pagesDBMS SolutionArpoxonNo ratings yet
- Asic Design Cadence DR D Gracia Nirmala RaniDocument291 pagesAsic Design Cadence DR D Gracia Nirmala RaniAdline RiniNo ratings yet
- INTERSHIP PPT LectureDocument16 pagesINTERSHIP PPT LectureMohammed AawezNo ratings yet
- 03 Ch3 Money Market - Practice SheetDocument17 pages03 Ch3 Money Market - Practice SheetDhruvi VachhaniNo ratings yet
- GearsDocument48 pagesGearsIshrita SaxenaNo ratings yet
- Eng V Unit 3 1.4Document17 pagesEng V Unit 3 1.4Olenka VillavicencioNo ratings yet
- ERA - InfoTech LTDDocument2 pagesERA - InfoTech LTDRABIUL ISLAMNo ratings yet
- Manual de Serviço Ar Sala LG CBN181QLA PDFDocument64 pagesManual de Serviço Ar Sala LG CBN181QLA PDFYuri GodoyNo ratings yet
- CV GomesDocument25 pagesCV GomesblablismoNo ratings yet
- List of Sub-District of Anantapur DistrictDocument3 pagesList of Sub-District of Anantapur DistrictLokeshkumar YSRCPNo ratings yet
- Final Scope of Work Pachmari SWMDocument10 pagesFinal Scope of Work Pachmari SWMSANJAY PARASARNo ratings yet
- Saudi Arabia Airlines Vs CA DigestDocument5 pagesSaudi Arabia Airlines Vs CA DigestAbilene Joy Dela CruzNo ratings yet