You might also like
- C2 - 5 Torque and Simple MachinesDocument45 pagesC2 - 5 Torque and Simple MachinesLionel MessiNo ratings yet
- PhysicsDocument162 pagesPhysicsRajat Anand100% (1)
- Grade 9 and 10 Physics Short Note in 2015 2023Document36 pagesGrade 9 and 10 Physics Short Note in 2015 2023Hemen AntenehNo ratings yet
- Torque ActivityDocument33 pagesTorque ActivityCharlie FernandezNo ratings yet
- What Is ForceDocument2 pagesWhat Is ForcevickyprabaNo ratings yet
- ME 3507: Theory of MachinesDocument69 pagesME 3507: Theory of Machinesusama riazNo ratings yet
- Equilibrium of Rigid Body & FrictionDocument54 pagesEquilibrium of Rigid Body & Frictionmuhammad adnielNo ratings yet
- Mechanical Systems: MachinesDocument25 pagesMechanical Systems: MachinesHomok NokiNo ratings yet
- UNIT-V Friction & Belt DrivesDocument37 pagesUNIT-V Friction & Belt DrivesGokulraju RangasamyNo ratings yet
- CHAPTER 5 - Work & Energy (v1)Document78 pagesCHAPTER 5 - Work & Energy (v1)Salina MohmadNo ratings yet
- Balancing of Rotating MachinesDocument29 pagesBalancing of Rotating Machinesbudiharyatno100% (1)
- Beam Analysis PDFDocument26 pagesBeam Analysis PDFnurizzaatiNo ratings yet
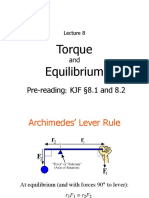
- Torque Equilibrium: Pre-Reading: KJF 8.1 and 8.2Document29 pagesTorque Equilibrium: Pre-Reading: KJF 8.1 and 8.2Burce MherjheNo ratings yet
- COE 2001 Statics - Lecture 1 - IntroductionDocument22 pagesCOE 2001 Statics - Lecture 1 - Introductionremino1No ratings yet
- The Ramp Phet LabDocument2 pagesThe Ramp Phet LabSamuel JayNo ratings yet
- Lect BalancingDocument72 pagesLect BalancingTalha KhanzadaNo ratings yet
- Lect Mechanical AdvantageDocument70 pagesLect Mechanical AdvantageZeeshan RafiqNo ratings yet
- Class 10 Physics Chapter 3 Revision NotesDocument5 pagesClass 10 Physics Chapter 3 Revision Notescharusheela charusheelaNo ratings yet
- 01b Biomechanic of KAFODocument66 pages01b Biomechanic of KAFOFERYANDA UTAMINo ratings yet
- 006 FrictionDocument19 pages006 FrictionJorge VaccarelloNo ratings yet
- 1 1 1 A A Simplemachinesleverwheelandaxlepulley 1Document35 pages1 1 1 A A Simplemachinesleverwheelandaxlepulley 1api-326094851No ratings yet
- Engineering PhysicsDocument177 pagesEngineering PhysicsReally RileyNo ratings yet
- Heavy Load Lifting MachineDocument41 pagesHeavy Load Lifting MachineAlmubeenNo ratings yet
- Chapter 4 Equilibrium PF Rigid Body & ForceDocument61 pagesChapter 4 Equilibrium PF Rigid Body & ForceIsabelNo ratings yet
- Second Condition of EquilibriumDocument86 pagesSecond Condition of EquilibriumKimberly FloresNo ratings yet
- Physics 04-Statics, Torque, Rotational Motion (2016)Document46 pagesPhysics 04-Statics, Torque, Rotational Motion (2016)Yash ChauhanNo ratings yet
- Pullies and Their WorkingDocument4 pagesPullies and Their WorkingWaleed J sKNo ratings yet
- 6 Simple Machines NotesDocument89 pages6 Simple Machines NotesMuhammad MadaNo ratings yet
- Ssph011 Session 14 Work, Energy and PowerDocument74 pagesSsph011 Session 14 Work, Energy and PowerPortia NyakaneNo ratings yet
- Genphy2 SA1 Miranda, Rochelle Ann D. S12-10 Attempt#1Document9 pagesGenphy2 SA1 Miranda, Rochelle Ann D. S12-10 Attempt#1rochelleannmiranda07No ratings yet
- Activity4 1a Simple MachinesDocument19 pagesActivity4 1a Simple MachinesabdulmalikbkNo ratings yet
- Mechanical System Isolation:: Free-Body DiagramDocument33 pagesMechanical System Isolation:: Free-Body DiagramChristian DelfinNo ratings yet
- Rotational Dynamics: TorqueDocument4 pagesRotational Dynamics: TorqueNeil Kyle ManiquisNo ratings yet
- Flywheel PhysicsDocument12 pagesFlywheel PhysicsWelkin Joseph GüntherNo ratings yet
- GP4 ForcesDocument10 pagesGP4 Forcesdinakempho3No ratings yet
- 04-02 Lecture Notes Compilation - Understanding Forces Tension Equilibrium Friction and Drag Force ApcDocument38 pages04-02 Lecture Notes Compilation - Understanding Forces Tension Equilibrium Friction and Drag Force ApcBradley ChisolmNo ratings yet
- Chapter No 14: (SECTIONS 14.1-14.4, 14.6)Document63 pagesChapter No 14: (SECTIONS 14.1-14.4, 14.6)Farhan ShahriarNo ratings yet
- Ssph011 Session 15 Biomechanic Moments (Torque) and ElasticityDocument55 pagesSsph011 Session 15 Biomechanic Moments (Torque) and ElasticityPortia NyakaneNo ratings yet
- W11L2 Gr10-Force and Motion-Lab SimulationDocument4 pagesW11L2 Gr10-Force and Motion-Lab Simulationelyazya alkatheeriNo ratings yet
- Balance IdentificationDocument5 pagesBalance IdentificationEstebanRiveraNo ratings yet
- PhysicsDocument24 pagesPhysicscypher16102No ratings yet
- Physics Lesson Note For Grade 10Document16 pagesPhysics Lesson Note For Grade 10muluken bizuayhuNo ratings yet
- Fundamentals of Vehicle Dynamics: Lecture 1-2Document26 pagesFundamentals of Vehicle Dynamics: Lecture 1-2obeidNo ratings yet
- Dom - 2marks MinimumDocument4 pagesDom - 2marks MinimumRobinston Jeyasingh KNo ratings yet
- Principle of MomentsDocument18 pagesPrinciple of Momentsmelissa50% (2)
- Rotational MechanicsDocument31 pagesRotational MechanicsvarenlNo ratings yet
- Ch. 3 - Structural Fundamentals: StaticsDocument7 pagesCh. 3 - Structural Fundamentals: StaticsJan Nikolai GongoraNo ratings yet
- 1.1.1.a.a SimpleMachinesLeverWheelAndAxlePulleyDocument35 pages1.1.1.a.a SimpleMachinesLeverWheelAndAxlePulleyill4565No ratings yet
- Robotics: - Prabhat Chandra BajpaiDocument26 pagesRobotics: - Prabhat Chandra BajpaiPrabhat BajpaiNo ratings yet
- Chapter 5 - Uniform Circular MotionDocument17 pagesChapter 5 - Uniform Circular MotionJordan RamosNo ratings yet
- PulleysDocument16 pagesPulleysFinito TheEndNo ratings yet
- The Concepts of Equilibrium Bragais Ludangco PormalejoDocument85 pagesThe Concepts of Equilibrium Bragais Ludangco PormalejoJANE CASSANONo ratings yet
- The 6 Simple Machines: Wedge Screw Inclined PlaneDocument26 pagesThe 6 Simple Machines: Wedge Screw Inclined Planepankaj51281No ratings yet
- Torque & Equilibrium ConditionsDocument13 pagesTorque & Equilibrium ConditionsJohn Dale IbaleNo ratings yet
- Chap13mech PDFDocument34 pagesChap13mech PDFPower FullNo ratings yet
- 0 - Forças Vs Energia - Revisão FundamentalDocument72 pages0 - Forças Vs Energia - Revisão FundamentalCarla PiresNo ratings yet
- Subnetting Examples - Jeremy CioaraDocument7 pagesSubnetting Examples - Jeremy Cioarapiljug50% (2)
- Technical Interview Questions Active Directory and Networking - Part IDocument90 pagesTechnical Interview Questions Active Directory and Networking - Part Iajitskhot108100% (29)
- C Interview Questions - TechPreparationDocument16 pagesC Interview Questions - TechPreparationchrisp83% (6)
- Hidden XP SecretsDocument4 pagesHidden XP SecretsSurajbhan SinghNo ratings yet
- Online Student RegistrationDocument4 pagesOnline Student Registrationyeshwanth56089% (9)
- Mechanical Concepts 101Document31 pagesMechanical Concepts 101yeshwanth560No ratings yet
- Online Student RegistrationDocument4 pagesOnline Student Registrationyeshwanth56089% (9)
- Mini ProjectsDocument2 pagesMini Projectsyeshwanth560No ratings yet
- Microprocessor 1 & 2 UnitsDocument18 pagesMicroprocessor 1 & 2 UnitsDeekshith AllamaneniNo ratings yet
- Online Student RegistrationDocument4 pagesOnline Student Registrationyeshwanth56089% (9)
- Clay's Official Problem Description Navier-Stokes Equations by C. L. FeffermanDocument5 pagesClay's Official Problem Description Navier-Stokes Equations by C. L. Feffermande_jackNo ratings yet
- QpmathDocument17 pagesQpmathmuhammediqbalNo ratings yet
- July 2014Document56 pagesJuly 2014Gas, Oil & Mining Contractor MagazineNo ratings yet
- EQUIP9-Operations-Use Case ChallengeDocument6 pagesEQUIP9-Operations-Use Case ChallengeTushar ChaudhariNo ratings yet
- Life Assessment of High Temperature HeadersDocument31 pagesLife Assessment of High Temperature HeadersAnonymous UoHUag100% (1)
- 3-CHAPTER-1 - Edited v1Document32 pages3-CHAPTER-1 - Edited v1Michael Jaye RiblezaNo ratings yet
- Video ObservationDocument8 pagesVideo Observationapi-532202065No ratings yet
- IRJ November 2021Document44 pagesIRJ November 2021sigma gaya100% (1)
- Data SheetDocument14 pagesData SheetAnonymous R8ZXABkNo ratings yet
- Tourism and GastronomyDocument245 pagesTourism and GastronomySakurel ZenzeiNo ratings yet
- PC300-8 New ModelDocument22 pagesPC300-8 New Modeljacklyn ade putra100% (2)
- Project Report On HeritageDocument39 pagesProject Report On HeritageBALA YOGESH YANDAMURINo ratings yet
- 02 Laboratory Exercise 1Document2 pages02 Laboratory Exercise 1Mico Bryan BurgosNo ratings yet
- C7.5 Lecture 18: The Schwarzschild Solution 5: Black Holes, White Holes, WormholesDocument13 pagesC7.5 Lecture 18: The Schwarzschild Solution 5: Black Holes, White Holes, WormholesBhat SaqibNo ratings yet
- ADP G2 Spreadsheet Loader Data Entry: End-User GuideDocument48 pagesADP G2 Spreadsheet Loader Data Entry: End-User Guideraokumar250% (2)
- Higher Vapor Pressure Lower Vapor PressureDocument10 pagesHigher Vapor Pressure Lower Vapor PressureCatalina PerryNo ratings yet
- Week1 TutorialsDocument1 pageWeek1 TutorialsAhmet Bahadır ŞimşekNo ratings yet
- Aluminium PasteDocument11 pagesAluminium PasteGovindanayagi PattabiramanNo ratings yet
- Agreement - IDP - Transformation Institute - 2023Document16 pagesAgreement - IDP - Transformation Institute - 2023Elite ProgramNo ratings yet
- Narrative FixDocument6 pagesNarrative Fixfitry100% (1)
- Advantages of The CapmDocument3 pagesAdvantages of The Capmdeeparaghu6No ratings yet
- Determination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerDocument3 pagesDetermination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerVeronica DrgNo ratings yet
- Angeles City National Trade SchoolDocument7 pagesAngeles City National Trade Schooljoyceline sarmientoNo ratings yet
- James KlotzDocument2 pagesJames KlotzMargaret ElwellNo ratings yet
- Jurnal KORELASI ANTARA STATUS GIZI IBU MENYUSUI DENGAN KECUKUPAN ASIDocument9 pagesJurnal KORELASI ANTARA STATUS GIZI IBU MENYUSUI DENGAN KECUKUPAN ASIMarsaidNo ratings yet
- Deep Sea 500 Ats ManDocument18 pagesDeep Sea 500 Ats ManLeo Burns50% (2)
- Policy Implementation NotesDocument17 pagesPolicy Implementation NoteswubeNo ratings yet
- ISP SFD PDFDocument73 pagesISP SFD PDFNamo SlimanyNo ratings yet
- Computer Science HandbookDocument50 pagesComputer Science HandbookdivineamunegaNo ratings yet
- Quadratic SDocument20 pagesQuadratic SAnubastNo ratings yet
- Dekker V Weida Amicus Brief by 17 AGsDocument35 pagesDekker V Weida Amicus Brief by 17 AGsSarah WeaverNo ratings yet
- Product 97 File1Document2 pagesProduct 97 File1Stefan StefanNo ratings yet