You might also like
- Dgdlinfineon BTT6010 1ERA DS v01 00 en - Pdffileid #Page11Document46 pagesDgdlinfineon BTT6010 1ERA DS v01 00 en - Pdffileid #Page11muhammetNo ratings yet
- Optimizing Efficiency of Switching Mode Chargers: Multi-Cell Battery Charge Management (MBCM)Document27 pagesOptimizing Efficiency of Switching Mode Chargers: Multi-Cell Battery Charge Management (MBCM)mbozhoNo ratings yet
- Gate DriverDocument27 pagesGate DriverRajasekaranViswaNo ratings yet
- BA823Document7 pagesBA823BanyugeaNo ratings yet
- BJT TransistorDocument52 pagesBJT Transistoralia shahiraNo ratings yet
- For New Designs: SSC9522S Data SheetDocument21 pagesFor New Designs: SSC9522S Data Sheetfalla naNo ratings yet
- Modeling and Simulation of Buck-Boost Converter With Voltage Feedback ControlDocument5 pagesModeling and Simulation of Buck-Boost Converter With Voltage Feedback Controlsambit dasNo ratings yet
- 07 GTO - IGBT - ConvertersDocument136 pages07 GTO - IGBT - Convertersriajul100% (1)
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document8 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)dz info tech2techNo ratings yet
- User's Guide: UCC2541 72-W Synchronous Buck ConverterDocument22 pagesUser's Guide: UCC2541 72-W Synchronous Buck ConverterNeslyn BocioNo ratings yet
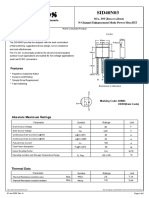
- MJD340 (NPN), MJD350 (PNP) High Voltage Power Transistors: DPAK For Surface Mount ApplicationsDocument8 pagesMJD340 (NPN), MJD350 (PNP) High Voltage Power Transistors: DPAK For Surface Mount Applicationshalil ibrahim soysalNo ratings yet
- DC DC ConvertersDocument22 pagesDC DC ConvertersAnonymous UJs2uePNo ratings yet
- IRFB3307 IRFS3307 IRFSL3307: V 75V R Typ. 5.0m Max. 6.3m I 130ADocument12 pagesIRFB3307 IRFS3307 IRFSL3307: V 75V R Typ. 5.0m Max. 6.3m I 130AAlceu DluzniewskiNo ratings yet
- New DC/DC Converter For Space ApplicationsDocument37 pagesNew DC/DC Converter For Space ApplicationsLeonard GržetićNo ratings yet
- 40N03 36a 30v N-Channel Mosfet TransistorDocument5 pages40N03 36a 30v N-Channel Mosfet TransistorYasir FaurNo ratings yet
- Afgy120t65spd B4Document11 pagesAfgy120t65spd B4RaduNo ratings yet
- 23NM60ND STMicroelectronicsDocument12 pages23NM60ND STMicroelectronicskeisinhoNo ratings yet
- Pdiol 2008dec24 Supply An 01Document3 pagesPdiol 2008dec24 Supply An 01Roberto De Mesa PNo ratings yet
- Shenzhen Hifibercom Technology Co.,Ltd 10G Bidi 20km Optical ModuleDocument8 pagesShenzhen Hifibercom Technology Co.,Ltd 10G Bidi 20km Optical Modulehifibercom comNo ratings yet
- MDF7N60BDocument8 pagesMDF7N60BFreddyNo ratings yet
- Tda 7296 PDFDocument14 pagesTda 7296 PDFNenea IonutNo ratings yet
- NCP1606 Cost Effective Power Factor Controller: Marking DiagramsDocument22 pagesNCP1606 Cost Effective Power Factor Controller: Marking DiagramsVanessa FumesNo ratings yet
- STPS20H100CT/CF/CG/CG-1: High Voltage Power Schottky RectifierDocument7 pagesSTPS20H100CT/CF/CG/CG-1: High Voltage Power Schottky RectifierVicente MiróNo ratings yet
- DD312 SiTiDocument2 pagesDD312 SiTiStephane MichauxNo ratings yet
- Fcp190N60 / Fcpf190N60: N-Channel Superfet Ii MosfetDocument10 pagesFcp190N60 / Fcpf190N60: N-Channel Superfet Ii Mosfetarness22No ratings yet
- VN In: StartDocument5 pagesVN In: StartPrateek TripathiNo ratings yet
- CH 13Document30 pagesCH 13Malik BilalNo ratings yet
- Basic Electronics by Bakshi PDFDocument226 pagesBasic Electronics by Bakshi PDFnijuNo ratings yet
- 2.transistor ModellingDocument31 pages2.transistor ModellingRohit KumarNo ratings yet
- Self-Oscillating Half-Bridge Driver: Features Product SummaryDocument6 pagesSelf-Oscillating Half-Bridge Driver: Features Product SummaryJean AlvesNo ratings yet
- NDC96 NDC 96 24-75VDC 1.9-6.0a Stepping Motor Drive Boxed Rta Pavia ManualDocument9 pagesNDC96 NDC 96 24-75VDC 1.9-6.0a Stepping Motor Drive Boxed Rta Pavia Manualrenato vitaliNo ratings yet
- General Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosDocument8 pagesGeneral Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosCastro G. LombanaNo ratings yet
- High Step Up ConvertersDocument100 pagesHigh Step Up ConvertersRakesh SandarativjuNo ratings yet
- P F E T: General Description FeaturesDocument4 pagesP F E T: General Description Featuresrezha jonNo ratings yet
- MJD32C: 100V PNP High Voltage Transistor in To252Document7 pagesMJD32C: 100V PNP High Voltage Transistor in To252Mihajlo Morgan KucinaNo ratings yet
- Isolated DC-DC Converters: Chapter TwoDocument12 pagesIsolated DC-DC Converters: Chapter TwoMarko SvalinaNo ratings yet
- 10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Document11 pages10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Владислав РусинNo ratings yet
- 10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Document11 pages10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Владислав РусинNo ratings yet
- 4.2 Current Bidirectional Switches PDFDocument7 pages4.2 Current Bidirectional Switches PDFJahangeer SoomroNo ratings yet
- FCP104N60 D-2312015Document11 pagesFCP104N60 D-2312015Electronica Analogica Y DigitalNo ratings yet
- Vector Control Inverter: SeriesDocument8 pagesVector Control Inverter: SeriesEdin MahmutagicNo ratings yet
- ZXTN2031FDocument7 pagesZXTN2031FHuu NguyenNo ratings yet
- SMPSDocument46 pagesSMPSNimsiri AbhayasingheNo ratings yet
- Design and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irDocument5 pagesDesign and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irseyed mohsen SalehiNo ratings yet
- Ir2175 (S) & (PBF) : Linear Current Sensing IcDocument7 pagesIr2175 (S) & (PBF) : Linear Current Sensing IcDavid CoronadoNo ratings yet
- Telefono l3240b Twotone RingerDocument6 pagesTelefono l3240b Twotone Ringerblackbeast79No ratings yet
- AD7811/AD7812: Parameter Y Version Units Test Conditions/CommentsDocument1 pageAD7811/AD7812: Parameter Y Version Units Test Conditions/CommentsAntonio HerreraNo ratings yet
- 5.DC-DC Converters (Part 2)Document35 pages5.DC-DC Converters (Part 2)dwiaguspurwantoNo ratings yet
- 04 Power SCD 2Document82 pages04 Power SCD 2riajulNo ratings yet
- DC-DC Converter - AllDocument99 pagesDC-DC Converter - AllAijaz HussainNo ratings yet
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDocument74 pagesChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsHoang ManhNo ratings yet
- Automotive Power Relay: Technical Data For Contact SideDocument3 pagesAutomotive Power Relay: Technical Data For Contact SideRakesh SutharNo ratings yet
- Automotive Power Relay: Technical Data For Contact SideDocument3 pagesAutomotive Power Relay: Technical Data For Contact SideRakesh SutharNo ratings yet
- Abb Flyer Igct 2015Document2 pagesAbb Flyer Igct 2015Dhruv PatelNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document8 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Ryn YahuFNo ratings yet
- SOP-8 Plastic-Encapsulate MOSFETS: N-Channel Enhancement Mode Power MOSFETDocument5 pagesSOP-8 Plastic-Encapsulate MOSFETS: N-Channel Enhancement Mode Power MOSFETmuzaffarfarhan79No ratings yet
- FJA13009 (Similar A J5804-Corrente Do j5804 10A) PDFDocument6 pagesFJA13009 (Similar A J5804-Corrente Do j5804 10A) PDFhenriquegonferNo ratings yet
- Advanced Power Electronics Corp.: DescriptionDocument7 pagesAdvanced Power Electronics Corp.: DescriptionDaiver JuarezNo ratings yet
- NCP1606 Cost Effective Power Factor Controller: Marking DiagramsDocument22 pagesNCP1606 Cost Effective Power Factor Controller: Marking DiagramsIvan Alberto Pinituj GarciaNo ratings yet
- PWM Fan ControllerDocument5 pagesPWM Fan ControlleranandNo ratings yet
- Irf2110 AplicationDocument30 pagesIrf2110 Aplicationanand100% (1)
- Diode Bridge Rectifier CapacitorDocument15 pagesDiode Bridge Rectifier Capacitoranand100% (1)
- Sensor Less Control of The BLDC MotorsDocument20 pagesSensor Less Control of The BLDC Motorsanand100% (1)
- Reading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationDocument24 pagesReading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationanandNo ratings yet
- Datasheet Ic Regulator 3,3vDocument7 pagesDatasheet Ic Regulator 3,3vSlamet RiyadiNo ratings yet
- Power PCDocument16 pagesPower PCar abNo ratings yet
- 1A Low Noise Cmos Ldo Regulator With Enable Ap2114: General Description FeaturesDocument33 pages1A Low Noise Cmos Ldo Regulator With Enable Ap2114: General Description FeaturesVipin SharmaNo ratings yet
- Vegas 15341Document23 pagesVegas 15341Eric ArcherNo ratings yet
- Hx3589fh CiDocument50 pagesHx3589fh CiRildoNo ratings yet
- Unisonic Technologies Co., LTD: Low Drop Fixed and Adjustable Positive Voltage RegulatorsDocument16 pagesUnisonic Technologies Co., LTD: Low Drop Fixed and Adjustable Positive Voltage RegulatorsfragNo ratings yet
- Ka2206b Amplificador Radio USB SONIVOXDocument4 pagesKa2206b Amplificador Radio USB SONIVOXLuis Alfonso Prada LeonNo ratings yet
- Manual Antminer S9K S9SEDocument16 pagesManual Antminer S9K S9SEROLVISANNo ratings yet
- Reg113 33Document21 pagesReg113 33xxxNo ratings yet
- LM350 DatasheetDocument12 pagesLM350 DatasheetOmarVelasquezC.No ratings yet
- Design of High PSRR Folded Cascode Operational Amplifier For LDO ApplicationsDocument5 pagesDesign of High PSRR Folded Cascode Operational Amplifier For LDO Applicationsjeevamk423No ratings yet
- Digital Satellite Tuner: Single Chip Tuner For DVB-S/ABS-S ReceiverDocument17 pagesDigital Satellite Tuner: Single Chip Tuner For DVB-S/ABS-S Receivertecniloco80No ratings yet
- SA7454 Datasheet - Eeworld.com - CNDocument6 pagesSA7454 Datasheet - Eeworld.com - CNManuel PradoNo ratings yet
- LM323K TransistorDocument12 pagesLM323K TransistorunoNo ratings yet
- S 7815 PDocument10 pagesS 7815 PshaniimranNo ratings yet
- Semiconductor KIA78R05API KIA78R15API: Technical DataDocument8 pagesSemiconductor KIA78R05API KIA78R15API: Technical Datajmbernal7487886No ratings yet
- LM117/LM317A/LM317-N Three-Terminal Adjustable Regulator: FeaturesDocument40 pagesLM117/LM317A/LM317-N Three-Terminal Adjustable Regulator: FeaturesVictor FsNo ratings yet
- ZE620KL L3-L4 Board Level TroubleShooting Guide - 20180102Document24 pagesZE620KL L3-L4 Board Level TroubleShooting Guide - 20180102Leo MendesNo ratings yet
- CS8126 1Document10 pagesCS8126 1Enrique VazquezNo ratings yet
- Milliken Thesis Ldo Differentiator PDFDocument106 pagesMilliken Thesis Ldo Differentiator PDFkijiji userNo ratings yet
- NCP 6343Document1 pageNCP 6343Victoria PorterNo ratings yet
- TI Maximizing SNRDocument58 pagesTI Maximizing SNRdhfsi7496No ratings yet
- 15 W 2-Channel BTL AF Power Amplifier For Car Stereos: 3109-SIP18HDocument9 pages15 W 2-Channel BTL AF Power Amplifier For Car Stereos: 3109-SIP18HErnane OliveiraNo ratings yet
- 1.5A Low Dropout Regulator: Global Mixed-Mode Technology IncDocument1 page1.5A Low Dropout Regulator: Global Mixed-Mode Technology IncPadmajan YesodharanNo ratings yet
- Isl 95520Document2 pagesIsl 95520Indika Bandara100% (1)
- 110V LdoDocument20 pages110V LdoJohn MelchizedekNo ratings yet
- La 4108Document12 pagesLa 4108andrzej_w_k100% (3)
- LDO Basics - Preventing Reverse Current - Power Management - Technical Articles - TI E2E Support ForumsDocument6 pagesLDO Basics - Preventing Reverse Current - Power Management - Technical Articles - TI E2E Support Forumstheodoros tzouralasNo ratings yet
- Lag 665Document6 pagesLag 665Radu PaulNo ratings yet
- Datasheet AMS1117Document8 pagesDatasheet AMS1117Maulana YusufNo ratings yet