You might also like
- Project ReportDocument21 pagesProject ReportbabinaNo ratings yet
- Applications and Use of Laplace Transform in The Field of Engineering.Document14 pagesApplications and Use of Laplace Transform in The Field of Engineering.ashishpatel_9969% (32)
- RLC Transfer Function AnalysisDocument38 pagesRLC Transfer Function AnalysisMarasigan Ryan50% (2)
- Explaining Convolution Using MATLABDocument10 pagesExplaining Convolution Using MATLABRupesh VermaNo ratings yet
- Taylor Series in ChemistryDocument4 pagesTaylor Series in ChemistryAndreea DărîngăNo ratings yet
- Fractions and Decimals Assignment 2019Document6 pagesFractions and Decimals Assignment 2019MathKeysNo ratings yet
- GVICDocument157 pagesGVICTemitope OniNo ratings yet
- Laplace transform applications in circuit theoryDocument10 pagesLaplace transform applications in circuit theorySudip BiswasNo ratings yet
- Laplace - Transform Anju BDocument25 pagesLaplace - Transform Anju BJyothi upadhyayNo ratings yet
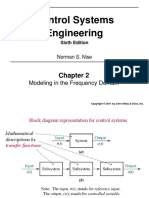
- CHAPTER 1 Modeling in The Frequency DomainDocument17 pagesCHAPTER 1 Modeling in The Frequency DomainAnnette TageufoueNo ratings yet
- Notes On Phasors: 1.1 Time-Harmonic Physical QuantitiesDocument11 pagesNotes On Phasors: 1.1 Time-Harmonic Physical QuantitiesonezimocardosoNo ratings yet
- Mece306 ch02 2019 20Document82 pagesMece306 ch02 2019 20Eren ÖzataNo ratings yet
- Inverse Laplace Transform of A ConstantDocument4 pagesInverse Laplace Transform of A Constanttutorciecle1230% (1)
- Mathematical Models of SystemsDocument45 pagesMathematical Models of SystemsSaid Ahmed AliNo ratings yet
- Mathematics Mini Pro 2 3Document8 pagesMathematics Mini Pro 2 3Preethi PadmanabanNo ratings yet
- MTH102 Laplace Transform Engineering ApplicationsDocument14 pagesMTH102 Laplace Transform Engineering ApplicationsJeo CandilNo ratings yet
- Create Models of Engineering Systems TutorialDocument28 pagesCreate Models of Engineering Systems TutorialarietoxNo ratings yet
- Laplace Transform - Aminul Haque, 2224EEE00222Document25 pagesLaplace Transform - Aminul Haque, 2224EEE00222Ãmîñûł Hãqûê AHNo ratings yet
- Laplace Transforms and Its Wide-Ranging Engineering ApplicationsDocument4 pagesLaplace Transforms and Its Wide-Ranging Engineering ApplicationsAhmed S. El-MoghazyNo ratings yet
- Laplace Transform - Aminul Haque, 2224EEE00222Document25 pagesLaplace Transform - Aminul Haque, 2224EEE00222Ãmîñûł Hãqûê AHNo ratings yet
- Tarea 04Document4 pagesTarea 04RudyNo ratings yet
- Circuit Theory Laplace Transform GuideDocument14 pagesCircuit Theory Laplace Transform GuideAkshay Pabbathi100% (1)
- ME 3001-Lecture 2 - Laplace Transform - 2017 - 18Document17 pagesME 3001-Lecture 2 - Laplace Transform - 2017 - 18vahitNo ratings yet
- Laplace Transform in Semiconductor MobilityDocument22 pagesLaplace Transform in Semiconductor MobilityNeha SaxenaNo ratings yet
- (9-11) Introduction To Laplace TransformDocument3 pages(9-11) Introduction To Laplace Transformpratiksha nagdawneNo ratings yet
- Laplace and Fourier Transform Analysis of Electric CircuitsDocument7 pagesLaplace and Fourier Transform Analysis of Electric CircuitsSwasti RanjanNo ratings yet
- Application of Laplace TransformDocument35 pagesApplication of Laplace TransformSingappuli100% (1)
- ELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsDocument4 pagesELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsAnonymous WkbmWCa8MNo ratings yet
- Introduction To The Laplace TransformDocument40 pagesIntroduction To The Laplace TransformAndra FlorentinaNo ratings yet
- Fifth&Sixth ProcedureDocument11 pagesFifth&Sixth ProcedureAmir RabbaniNo ratings yet
- App 4 LaplaceDocument6 pagesApp 4 LaplaceRycille AlayanNo ratings yet
- Frequency-Response Design Method Hand-OutDocument15 pagesFrequency-Response Design Method Hand-OutTrixie NuylesNo ratings yet
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- Lecture 4Document44 pagesLecture 4Zamshed FormanNo ratings yet
- 21bma021-Review 2Document17 pages21bma021-Review 2ShanmathiNo ratings yet
- Z TransformDocument9 pagesZ TransformKiran Googly JadhavNo ratings yet
- What is a Transfer FunctionDocument27 pagesWhat is a Transfer FunctionNandakumarNo ratings yet
- Laplace TransformDocument18 pagesLaplace Transformmim16No ratings yet
- Taylor's Theorem and Its ApplicationsDocument20 pagesTaylor's Theorem and Its ApplicationseracksNo ratings yet
- Utility of Laplace Transform in MathematicsDocument6 pagesUtility of Laplace Transform in MathematicsIJAERS JOURNALNo ratings yet
- Week 2Document45 pagesWeek 2salim ucarNo ratings yet
- Week 3 - Laplace TransformDocument8 pagesWeek 3 - Laplace TransformSwfian ۦۦNo ratings yet
- ECE 142 Laplace Transform GuideDocument26 pagesECE 142 Laplace Transform GuideKevinNo ratings yet
- Notes On Micro Controller and Digital Signal ProcessingDocument70 pagesNotes On Micro Controller and Digital Signal ProcessingDibyajyoti BiswasNo ratings yet
- Laplace Transformation NotesDocument26 pagesLaplace Transformation NotesVijayalakshmi MuraliNo ratings yet
- Aplace Transform: Applied Mathematics ProjectDocument11 pagesAplace Transform: Applied Mathematics Projectvinci maniNo ratings yet
- History of Laplace TransformDocument4 pagesHistory of Laplace TransformnishagoyalNo ratings yet
- Analysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude ControlDocument8 pagesAnalysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude Controleubis_machado4370No ratings yet
- Laplace Transform GuideDocument26 pagesLaplace Transform GuideShujah RashidNo ratings yet
- Laplace, Z Transform and Frequency Response: Experiment 10Document7 pagesLaplace, Z Transform and Frequency Response: Experiment 10Engr Haseena JabbarNo ratings yet
- A Brief Introduction To Laplace Transformation - As Applied in Vibrations IDocument9 pagesA Brief Introduction To Laplace Transformation - As Applied in Vibrations Ikravde1024No ratings yet
- Heaviside Operational Calculus by J R CarsonDocument26 pagesHeaviside Operational Calculus by J R CarsonGeraldo Carvalho Brito Jr.No ratings yet
- Circuit Analysis in S-DomainDocument22 pagesCircuit Analysis in S-Domainshreyas_stinsonNo ratings yet
- Week 1B - Online Classes - S2020Document25 pagesWeek 1B - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Laplace Transform 2020Document66 pagesLaplace Transform 2020Angeline Chasakara100% (2)
- group 6Document39 pagesgroup 61DT20CS148 Sudarshan SinghNo ratings yet
- Multiple-Arc Optimization ProblemsDocument2 pagesMultiple-Arc Optimization Problemsmykingboody2156No ratings yet
- NMB34203 - ch2 - Mathematical ModelDocument47 pagesNMB34203 - ch2 - Mathematical ModelfatinNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- GATE 2014 EC Answer KeysDocument1 pageGATE 2014 EC Answer KeysMirishkar S GaneshNo ratings yet
- Lmos EvolutionDocument21 pagesLmos EvolutionChitransh SharmaNo ratings yet
- AdmissionAnnouncement2013 14Document2 pagesAdmissionAnnouncement2013 14Ajeet_1991No ratings yet
- ADVT No - DMRC O M 1 2014Document5 pagesADVT No - DMRC O M 1 2014Er Ashish BahetiNo ratings yet
- AdmissionAnnouncement2013 14Document2 pagesAdmissionAnnouncement2013 14Ajeet_1991No ratings yet
- Introduccion A MESDocument12 pagesIntroduccion A MESguichiNo ratings yet
- 2nd & Subsequent Cycles - 65th ECDocument8 pages2nd & Subsequent Cycles - 65th ECChitransh SharmaNo ratings yet
- Class Xii - Differntiation & Integration Formulae.Document1 pageClass Xii - Differntiation & Integration Formulae.Mandeep Singh Plaha59% (22)
- Cadence Layout TipsDocument4 pagesCadence Layout TipsBhargav CoolNo ratings yet
- Cadence VirtuosoDocument6 pagesCadence VirtuosoChitransh SharmaNo ratings yet
- Curtain Opener CKTDocument3 pagesCurtain Opener CKTChitransh SharmaNo ratings yet
- 2nd & Subsequent Cycles - 65th ECDocument8 pages2nd & Subsequent Cycles - 65th ECChitransh SharmaNo ratings yet
- Curtain Opener CKTDocument3 pagesCurtain Opener CKTChitransh SharmaNo ratings yet
- IntroductionDocument1 pageIntroductionChitransh SharmaNo ratings yet
- And When I DieDocument32 pagesAnd When I DieJohana PintoNo ratings yet
- P-N JunctionDocument24 pagesP-N JunctionChitransh SharmaNo ratings yet
- TCs QUestionDocument55 pagesTCs QUestionHarishNo ratings yet
- DE & AUC - 12th (2018C) - E PDFDocument57 pagesDE & AUC - 12th (2018C) - E PDFAdithya DileepNo ratings yet
- Linear algebra explained: vectors, matrices, transformations, and applicationsDocument4 pagesLinear algebra explained: vectors, matrices, transformations, and applicationsRohit SahuNo ratings yet
- SM3 Wks 2-8Document10 pagesSM3 Wks 2-8Erin GallagherNo ratings yet
- First Quarter Exam in Math 7Document2 pagesFirst Quarter Exam in Math 7Mark Vincen GuindanaoNo ratings yet
- Mathematics II SyllabusDocument3 pagesMathematics II SyllabusATF ChannelNo ratings yet
- Alg I Scope and Sequence 4th Quarter 2012-2013Document7 pagesAlg I Scope and Sequence 4th Quarter 2012-2013api-70433300No ratings yet
- Francis Noblesse - On The Theory of Three-Dimensional Flow About A Ship Moving With Constant Speed in A Regular SeaDocument40 pagesFrancis Noblesse - On The Theory of Three-Dimensional Flow About A Ship Moving With Constant Speed in A Regular SeaYuriyAKNo ratings yet
- Mat263 Case StudyDocument8 pagesMat263 Case StudyFarahin SaidNo ratings yet
- CDROM Appendix ADocument4 pagesCDROM Appendix Abac_nobita7657No ratings yet
- Mathematical Language and SymbolsDocument5 pagesMathematical Language and SymbolsReygie FabrigaNo ratings yet
- Step 1: Join Here! For Free Chegg Unlocks Wallstreetbets - Https://Discord - Gg/Upqesafsyu (Https://Discord - Gg/Upqesafsyu)Document5 pagesStep 1: Join Here! For Free Chegg Unlocks Wallstreetbets - Https://Discord - Gg/Upqesafsyu (Https://Discord - Gg/Upqesafsyu)Muhammad AsifNo ratings yet
- Munkres - Topology - Chapter 1 Solutions: Section 3Document16 pagesMunkres - Topology - Chapter 1 Solutions: Section 3Júnia NevesNo ratings yet
- INVERSE OF ONE-TO-ONE FUNCTIONSDocument1 pageINVERSE OF ONE-TO-ONE FUNCTIONSJeffrey Del Mundo100% (1)
- 4 Fourier SeriesDocument22 pages4 Fourier SeriesFatin FadhlinaNo ratings yet
- Equations Transformable To Quadratic EqDocument14 pagesEquations Transformable To Quadratic EqAlvin MiguelNo ratings yet
- Circles Class 10 + Integrated PYQsDocument37 pagesCircles Class 10 + Integrated PYQsHIMNISH SHARMANo ratings yet
- Least Squares ProblemsDocument30 pagesLeast Squares Problemsezilnah7No ratings yet
- CURVES Survey PDFDocument27 pagesCURVES Survey PDFnewton mbogori67% (3)
- Cambridge International Examinations Cambridge Ordinary LevelDocument7 pagesCambridge International Examinations Cambridge Ordinary LevelMurtaza VasiNo ratings yet
- CH 1 Relations and Functions Multiple Choice Questions With Answers PDFDocument3 pagesCH 1 Relations and Functions Multiple Choice Questions With Answers PDFAnindya100% (4)
- Math and Statistics Chapter QuestionsDocument11 pagesMath and Statistics Chapter QuestionsMuhammad DawoodNo ratings yet
- Math Extracting RootsDocument4 pagesMath Extracting RootsAcademic Commissions - Pagawa ng ModulesNo ratings yet
- Trigonometric Integration FormulasDocument14 pagesTrigonometric Integration FormulasMarvin James JaoNo ratings yet
- Senior Maths Exam with Problems on Complex Numbers, Probability, Combinatorics & MoreDocument3 pagesSenior Maths Exam with Problems on Complex Numbers, Probability, Combinatorics & Morenishant bandaruNo ratings yet
- Geometric Seq and SeriesDocument10 pagesGeometric Seq and SeriesJay EmNo ratings yet
- Student Solutions GuideDocument316 pagesStudent Solutions GuidedisturbedphaetonNo ratings yet
- P1.ed - CH.8 Part 2Document25 pagesP1.ed - CH.8 Part 2math magicNo ratings yet
- GTM 008 - IsBN978!1!4684-8751-0 - Gaisi Takeuti, Wilson M. Zaring - Axiomatic Set TheoryDocument244 pagesGTM 008 - IsBN978!1!4684-8751-0 - Gaisi Takeuti, Wilson M. Zaring - Axiomatic Set TheoryHuang ZhiXingNo ratings yet